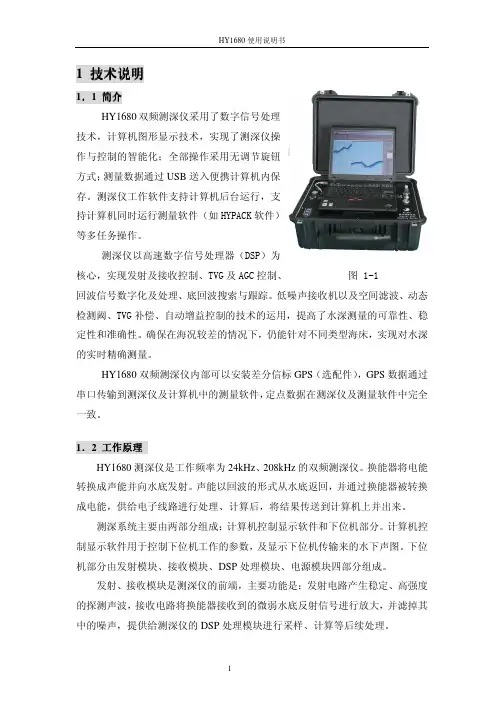
无锡海鹰系列测深仪介绍
- 格式:ppt
- 大小:7.11 MB
- 文档页数:63
星站差分GPS在长江三峡库区水下地形测量中的应用摘要:介绍星站差分GPS原理,通过SF-3040型星站GPS与GPS RTK在长江三峡库区河段的测试,结果表明SF-3040型星站GPS性能稳定、高效、高精度适合运用三峡库区水下地形测量。
关键词:星站差分GPS 三峡库区水下地形测量长江三峡库区航道在2008年175 m试验性蓄水后,水位的日变化随着三峡大坝的下泻流量而变化,日变幅最大0.2 m,水面高程相对比较稳定,本文详细介绍采用SF-3040型星站差分GPS在三峡库区水下地形测量中的应用。
1 水下地形测量的组成水下地形测量由硬件部分和软件部分组成,不管硬件部分还是软件部分都是水下地形测量不可分离的重要组成部分,在平面定位中所采用的GPS直接影响着测量作业的精度和效率。
1.1 硬件部分(1)测量专用船艇(长9.28 m,宽 2.5 m);(2)无锡海鹰测深仪HY-1600型号,测深精度为0.05+0.01Hm;(3)电脑;(4)SF-3040型星站GPS(或GPS RTK 1+1);(5)各种端口数据线。
1.2 软件部分(1)星站差分GPS设置软件:StarUtil-3000;(2)测量导航软件:南方自由行;(3)内业成图软件:清华山维。
2 星站差分GPS原理[2]星站差分GPS属于广域差分GPS(de area DGPS,W ADGPS)范畴,Starfire星站差分网络系统最初是John Deere&Co.和NavCom Technology Inc两家公司开发的广域差分矫正定位系统。
地面参考站网络由28个遍布全世界的高性能双频GPS接收机构成,数据处理中心将这些数据发送到3个地面卫星注入站(分别位于英格兰Goonhilly、加拿大Laurentides和新西兰Auckland),由这些卫星将差分矫正信号向全球播放。
3 星站差分GPS与GPS RTK在长江三峡库区河段的测试和应用为了测试SF-3040型星站GPS在三峡库区水下地形测量中的精度和效率,选择了在长江三峡库区鳊鱼溪(145 km)至万州(330 km)共155 km航道固定水下断面测量时进行测试。
单波束水深数据处理时遇到的一些问题的解决方法摘要:水深测量数据处理是整个水深测量过程中的一个重要环节,测量数据处理技术和方法直接影响成果的质量、数量及其应用。
在单波束测量时,因一些误操作,可能在数据处理时显示一些错误信息,导致内业工作不能正常进行,在此文中简单介绍了单波束水深测量原理和HYPACK软件在处理水深数据方面的应用,主要阐述了内业处理时水深数据显示异常的原因和解决方法,来保证测量工作有序开展。
关键词:单波束水深测量数据处理 HYPACK软件问题解决方法1单波束水深测量原理单波束水深测量系统由信标机(或RTK)和HY1600单波束测深仪组成。
信标机获取平面坐标,测深仪获取瞬时水深值,经过内业处理,即可得到海底三维坐标。
单波束测深原理:单波束测深仪的测深过程,是采用换能器垂直向下发射短脉冲声波,当这个脉冲声波遇到海底时发生反射(散射、衍射不考虑),反射回波返回声纳,并被换能器接收[1]。
其水深值由声波在海底间的往返时间和水介质的平均声速确定,即为瞬时水深值(如图1)。
测得的瞬时水深值与换能器吃水深度改正值和潮位改正值之和,即得到实际水深,即图载水深。
图1 单波束水深测量工作示意图2 HYPACK MAX 软件在疏浚测量中的应用介绍HYPACK MAX软件是美国coastal海洋图像公司推出的产品[2]。
该软件除了具备强大的测量成图系统功能外,还可与导航系统、测深仪(单波束、多波束)、波浪补偿器、绘图仪、打印机、潮位遥报仪、罗盘、耙臂等多种测量、疏浚施工设备相连接,分别组成自动化数字测绘系统和疏浚工作实时监测系统[3]。
是目前在测量、疏浚上使用最广泛的一种软件。
自软件引进并投入到水深测量工作以来,工作的质量和效率得到了极大的提高,在业界好评如潮。
其中,HYPACK软件在单波束水深测量的外业数据采集和内业处理方面起到了关键性作用,使用HYPACK软件对水深数据进行编辑处理,以及对吃水,声速,潮位进行改正处理,得到所需的图载水深XYZ文件。

水深测量中声速改正方法分析杨仁辉(中交广州航道局有限公司,广州,510221)摘要:本文介绍了水深测量中声速测量的两种方法,以HY1200声速仪为例,着重介绍了声速剖面仪的原理、软件应用以及平均声速的计算方法,并且对两种方法进行了比较、分析。
关键词:测试板法;声速剖面仪;HY1200系列;平均声速;声速改正数Correction for Acoustical velocityin Echo SoundingYANG Ren—hui(CCCC Guangzhou Dredging CO.,LTD.,Guangzhou 510221)Abstract: This paper introduces the method of test board and SVP,the focus is the principle、application software and average sound velocity of HY1200SVP.Then it discusses the diffenrent of test board and SVP.Key words:test board;Sound Velocity Profiler;HY1200SVP;average sound velocity;correction of sound velocity data1.引言水深测量通常采用回声测深系统进行测量。
回声测深系统的原理非常简单,主要是以声速和声速往返时间来计算水深,即:H=V×T/2(1)其中:V为声速、T为声速往返时间。
这里,声速往返时间是由系统感知计算得到的,声速由测量人员测定,所以为了得到相对精确的测量结果,声速的测定就成为水深测量过程中非常重要的一个步骤。
对于声速的测定我们一般采用两种方法,测试板法和声速剖面仪法。
测试板法和声速剖面仪是根据两种不同的思路设计的。
下面我们简单叙述一下这两种方法是如何测定声速的。


漫谈水深测量水深测量是直接为港口、航道及其配套设施建设提供水下地形资料的一项基础性测量。
在常规的水深测量中,以前方交会法为例,它需要配备10余人才能开展工作,当GPS进入测深领域,作业人员大为减少,但还是由水位观测、定位、测深等项工作所组成。
下面就这三项漫谈一下个人的体会。
1 水位观测当测量面积不大,在某一水位站的有效控制范围内,用该站的水位资料对所测的水深进行改正即可。
当测量面积较大时,所设置的二个水位站控制范围不能相互重叠,又因环境和其他条件所限,无法增设水位站时,水位的改正则需采用分带改正的方法。
水位分带改正方法适用于海区和内河的感潮河段,它要求相邻水位站的潮波方向基本一致,潮时和潮高的变化与距离成正比。
当测线离岸较远时,不仅要考虑瞬间海面在潮波传播方向的倾斜,还要考虑瞬间海面在側向的倾斜。
这就是三站间的水位改正(三角分带改正)。
水尺应设在能充分反映测区水位变化,无沙洲、浅滩阻隔、无壅水回流现象的地方,不能在小河口内、外,潮汐汊道,水闸下等设立,因这些地方潮波变形。
设立的水尺要防止干出或淹没,设置阶梯水尺相邻两根水尺要重叠20cm~30cm。
水尺零点高程以不低于图根水准精度要求接测,且要有校核,每天使用前,都应进行检查。
用于测深改正的水位一般每10分钟观测一次,读数至cm,当涨急、落急时应予以加密观测。
将观测的水位绘制水位过程曲线,正确的水位过程曲线应是正弦曲线,如有个别水位不正确,使水位曲线变异,可按曲线走向进行平滑,修改曲线。
用于改正水深的水位应从水位过程曲线上摘取。
2 测深定位:测深定位的方法有十余种,随着测量仪器的发展,一些定位方法已摒弃,目前我单位常用的有前方交会法、断面索法、GPS定位法。
2.1前方交会法前方交会法应以三架经纬仪同步交会,若用二架经纬仪交会,如果发生有啥差错,也无法追溯,这好比三角形测了二个内角,另一个角度是1800减出来的。
另外前方交会时,要注意交会角的大小,对三方向前方交会而言,最佳的交会角在85o~105o 之间,当交会角过大或过小时,其点位精度将衰减得很快。


水深测量中声速改正方法分析杨仁辉(中交广州航道局有限公司,广州,510221)摘要:本文介绍了水深测量中声速测量的两种方法,以HY1200声速仪为例,着重介绍了声速剖面仪的原理、软件应用以及平均声速的计算方法,并且对两种方法进行了比较、分析。
关键词:测试板法;声速剖面仪;HY1200系列;平均声速;声速改正数Correction for Acoustical velocityin Echo SoundingYANG Ren—hui(CCCC Guangzhou Dredging CO.,LTD.,Guangzhou 510221)Abstract: This paper introduces the method of test board and SVP,the focus is the principle、application software and average sound velocity of HY1200SVP.Then it discusses the diffenrent of test board and SVP.Key words:test board;Sound Velocity Profiler;HY1200SVP;average sound velocity;correction of sound velocity data1.引言水深测量通常采用回声测深系统进行测量。
回声测深系统的原理非常简单,主要是以声速和声速往返时间来计算水深,即:H=V×T/2(1)其中:V为声速、T为声速往返时间。
这里,声速往返时间是由系统感知计算得到的,声速由测量人员测定,所以为了得到相对精确的测量结果,声速的测定就成为水深测量过程中非常重要的一个步骤。
对于声速的测定我们一般采用两种方法,测试板法和声速剖面仪法。
测试板法和声速剖面仪是根据两种不同的思路设计的。
下面我们简单叙述一下这两种方法是如何测定声速的。
招标参数(一) 适用范围:产品适用于腹部、妇科、产科、心脏、小器官(乳腺、睾丸、甲状腺)、外周血管、肌肉骨骼(常规和浅表)的检查。
(二) 主要技术规格1 全数字彩色多普勒超声诊断系统*1.1 17英寸高分辨率LCD显示器,可俯仰、旋转,1.2 全数字化超声诊断系统主机1.3 全中文操作菜单1.4 图像一键自动优化1.5 组织谐波成像技术1.6 宽带频移谐波成像技术1.7 伪彩功能1.8 凸阵探头扩展成像1.9 线阵探头梯形成像1.10 斑点噪声抑制技术1.11 空间复合成像技术1.12 组织特征成像1.13碎石穿刺引导功能2 测量、分析及系统参数2.1 一般测量:B模式:深度,距离,角度,面积,体积,十字线法,平行线,描记长度,长度比率,面积比率,B-直方图,B-断面图M模式:心率,斜率,距离,时间,速度2.2 腹部测量测量包2.3 泌尿测量包2.4 小器官测量包2.5 妇科测量包2.6 产科测量包2.7 心脏测量包2.9 血管测量包3.0 矫形外科测量包3.1 可选配IMT血管内中膜自动测量3.1 以上软件包测量均能自动生成中文报告单3 图像存储与(电影)回放重现单元3.1 一键超声图像静态、动态存储3.2 独立离线分析系统(可对存储的静、动态图像进行再测量、分析)3.3 电影回放:自动、手动(自动回放区域可设),支持2D、M 图像联动回放3.4电影回放≥5000幅4. 图像管理与记录装置4.1 动态图像、静态图像以 PC 通用格式直接存储,无需特殊软件即能在普通 PC 机上直接观看图像;4.2 硬盘动、静态图像储存,内置硬盘≥320GB;4.3 4 个 USB 接口;5 技术参数及要求5.1 扫描方式:电子凸阵、电子线阵5.2 探头接口:≥4 个5.3全数字波束形成器5.4双探头连接通道5.5微光操作键盘5.6可变孔径动态聚焦5.7海量图像存储/1024帧电影回放5.8彩色血流成像模块5.9一体化工作站系统5.10画中画智能放大系统5.11高分辨率高密度电子凸阵探头,腹部,妇/产5.12高分辨率高密度电子线阵探头,血管应用。