单片机脉冲宽度测量程序
- 格式:doc
- 大小:35.50 KB
- 文档页数:4

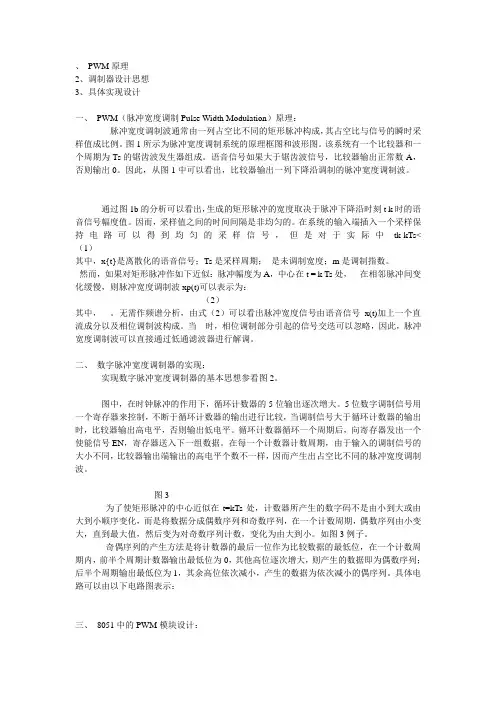
、PWM原理2、调制器设计思想3、具体实现设计一、PWM(脉冲宽度调制Pulse Width Modulation)原理:脉冲宽度调制波通常由一列占空比不同的矩形脉冲构成,其占空比与信号的瞬时采样值成比例。
图1所示为脉冲宽度调制系统的原理框图和波形图。
该系统有一个比较器和一个周期为Ts的锯齿波发生器组成。
语音信号如果大于锯齿波信号,比较器输出正常数A,否则输出0。
因此,从图1中可以看出,比较器输出一列下降沿调制的脉冲宽度调制波。
通过图1b的分析可以看出,生成的矩形脉冲的宽度取决于脉冲下降沿时刻t k时的语音信号幅度值。
因而,采样值之间的时间间隔是非均匀的。
在系统的输入端插入一个采样保持电路可以得到均匀的采样信号,但是对于实际中tk-kTs< (1)其中,x{t}是离散化的语音信号;Ts是采样周期;是未调制宽度;m是调制指数。
然而,如果对矩形脉冲作如下近似:脉冲幅度为A,中心在t = k Ts处,在相邻脉冲间变化缓慢,则脉冲宽度调制波xp(t)可以表示为:(2)其中,。
无需作频谱分析,由式(2)可以看出脉冲宽度信号由语音信号x(t)加上一个直流成分以及相位调制波构成。
当时,相位调制部分引起的信号交迭可以忽略,因此,脉冲宽度调制波可以直接通过低通滤波器进行解调。
二、数字脉冲宽度调制器的实现:实现数字脉冲宽度调制器的基本思想参看图2。
图中,在时钟脉冲的作用下,循环计数器的5位输出逐次增大。
5位数字调制信号用一个寄存器来控制,不断于循环计数器的输出进行比较,当调制信号大于循环计数器的输出时,比较器输出高电平,否则输出低电平。
循环计数器循环一个周期后,向寄存器发出一个使能信号EN,寄存器送入下一组数据。
在每一个计数器计数周期,由于输入的调制信号的大小不同,比较器输出端输出的高电平个数不一样,因而产生出占空比不同的脉冲宽度调制波。
图3为了使矩形脉冲的中心近似在t=kTs处,计数器所产生的数字码不是由小到大或由大到小顺序变化,而是将数据分成偶数序列和奇数序列,在一个计数周期,偶数序列由小变大,直到最大值,然后变为对奇数序列计数,变化为由大到小。
单片机脉冲计数单片机脉冲计数是指通过单片机对输入的脉冲信号进行计数。
在工业自动化、电子测量等领域中,脉冲计数广泛应用。
单片机脉冲计数是一种高精度、高可靠性的计数方式,可以实现对脉冲信号的精确计数和处理。
一、单片机脉冲计数的原理单片机脉冲计数的原理是通过单片机的计数器来实现的。
当有脉冲信号输入时,单片机的计数器开始计数。
在计数的过程中,单片机可以通过编程来实现对计数器的控制,如计数器的清零、计数器的读取等操作。
当计数结束时,单片机可以通过计算来得到脉冲信号的频率、周期、脉宽等参数。
二、单片机脉冲计数的步骤单片机脉冲计数的步骤主要包括以下几个方面:1.硬件电路设计硬件电路设计是单片机脉冲计数的重要环节。
在设计电路时,需要根据实际需要选择合适的计数器、脉冲输入口等元器件,并合理布局电路,确保电路的稳定性和可靠性。
2.编写单片机程序编写单片机程序是单片机脉冲计数的关键。
在编写程序时,需要考虑计数器的清零、计数器的读取、频率、周期、脉宽等参数的计算等多个方面。
同时,还需要考虑程序的效率和稳定性,确保程序能够正确地运行。
3.测试和调试测试和调试是单片机脉冲计数的最后一步。
在测试和调试时,需要使用示波器、计数器等设备进行检验,确保计数的精度和稳定性符合要求。
如果发现问题,需要及时进行排查和解决。
三、单片机脉冲计数的应用单片机脉冲计数在工业自动化、电子测量等领域中有着广泛的应用。
例如,可以用于物料计数、流量计量、速度检测、频率测量等方面。
在电子测量领域中,单片机脉冲计数可以实现高精度的波形测量和分析,如脉冲宽度测量、脉冲周期测量等。
四、单片机脉冲计数的优点单片机脉冲计数具有以下几个优点:1.高精度:单片机脉冲计数可以实现高精度的计数和测量,可以满足高精度的应用需求。
2.高可靠性:单片机脉冲计数采用数字化处理,具有高可靠性和稳定性,可以保证计数结果的准确性和可靠性。
3.易于扩展:单片机脉冲计数可以通过编程来实现计数器的扩展和功能的扩展,可以满足不同应用场合的需求。

电子科技大学综合课程设计报告基于单片机门控位的脉冲宽度测量与显示think2011/5/4一、 可行性分析及其原理:该项目是要实现脉冲宽度的测量,再把测量值用数码管显示。
为了实现这一功能我们大致把整个系统分为以下几个模块:1. 振荡器模块:产生某一特定振荡频率的时钟,一般要求这一频率较高,本题要求精度为10us ,所以采用100kHZ 的振荡频率即可。
2. 计数器模块:对振荡脉冲进行计数,用待测脉冲信号作为使能输入(或开关),这样就可以记录下脉冲有效的时间,计数值乘以10us 即为待测脉冲宽度。
3. 译码显示模块:题目中要求用数码管显示6位测量值,分别完成译码和数码管的静态显示或是动态扫描输出即可。
框图如下:二、 本次设计构思了两个方案:方案一:运用CD4518(BCD 码全加器)的级联来实现计数,CD4511七段译码,555多谐振荡器提供100kHZ 频率,待测信号输入到计数器使能。
电路连接图如下:上述方案为数码管静态显示。
优点为方案简单无需编程,只需要组合逻辑与时序逻辑即可完成。
缺点为硬件电路的连线过于复杂上容易出错且很难排除故障,另一个问题在于使用的外接振荡源精度不是很高,势必带来不小的误差。
此方案理论上可行,由于实际操作带来的不方便,我们考虑了后面一种方案。
方案二:利用单片机门控位实现脉冲宽度测量。
基本思路为:利用单片机内部定时器的GATE信号,对于定时器T0来讲,如果GATE=1,则用软件把TR0置1,且INT0为高电平时可以启动定时器T0,所以我们就把被测脉冲信号从INT0端输入,使其上升沿触发启动T0计数,下降沿停止T0计数。
定时器数值乘以机器周期即为脉冲宽度。
电路连接图如下:可以看出,电路结构由以下部分构成:1.振荡模块:12MHZ晶体振荡器,由XTAL1和XTAL2接入单片机。
2.单片机控制模块:AT89S51单片机实现控制,主要任务是对其进行必要的编程设计。
3.输出显示模块:由数码管动态扫描显示,注意P0需要外接上拉电阻。
山东科技大学电工电子实验教学中心创新性实验研究报告课程名称:单片机原理及应用实验项目名称脉冲宽度测量姓名学号_________________专业_____________ 班级____________指导教师及职称________________________开课学期2011 至2012 学年第一学期提交时间2012 年 1 月 3 日五、实验结果与分析1、实验现象、数据记录按照流程图所示,按动脉冲按钮,可以看到,显示屏显示出所测脉冲的宽度。
再次按动,可以清楚地观察到所示的示数变化。
每次显示的示数,都根据所按按钮的时间长短,即高电平的脉宽长度。
第一张图为T0工作方式,第二张图为T2捕捉方式。
六、实验结论七、指导老师评语及得分:附件:源程序等。
T0门控方式:ORG 0000HLJMP MAINORG 000BHLJMP T0_INTORG 0030H MAIN: MOV TMOD,#09HMOV TL0,#0FCHMOV TH0,#17HMOV R4,#00HMOV R3,#00HJB ,$SETB ET0SETB EAIOC: SETB TR0JNB ,$MOV R3,#00HMOV R4,#00HJB ,$CLR TR0MOV 34H,R4MOV 35H,R3LCALL BCDLCALL UBCD DIS: LCALL DISPJB ,IOCSJMP DIST0_INT:INC R3CJNE R3,#00H,NEXTINC R4NEXT: MOV TH0,#0FCHMOV TL0,#17HRETIBCD: MOV R7,#16CLR AMOV 47h,AMOV 46h,AMOV 45h,ABCD1:CLR CMOV A,35HRLC AMOV 35H,AMOV A,34HRLC AMOV 34H,AMOV A,47HADDC A,47HDA AMOV 47H,AMOV A,46HADDC A,46HDA AMOV 46H,AMOV A,45HADDC A,45HDA AMOV 45H,ADJNZ R7,BCD1RETUBCD:MOV A,45HANL A,#0F0HSWAP AMOV 50H,AMOV A,45HANL A,#0FHMOV 51H,AMOV A,46HANL A,#0F0HSWAP AMOV 52H,AMOV A,46HANL A,#0FHMOV 53H,AMOV A,47HANL A,#0F0HSWAP AMOV 54H,AMOV A,47HANL A,#0FHMOV 55H,ARETDISP:MOV R0,#55HMOV R2,#20HMOV A,#0FFHMOV P0,AACALL DIPMOV R0,#54H MOV R2,#10H ACALL DIPMOV R0,#53H MOV R2,#08H ACALL DIPMOV R0,#52H MOV R2,#04H MOV A,R2MOV P2,AMOV A,@R0MOV DPTR,#TABLE MOVC A,@A+DPTR ANL A,#7FHMOV P0,AACALL DELAY MOV R0,#51H MOV R2,#02H ACALL DIPMOV R0,#50HMOV R2,#01HACALL DIPRETDIP:MOV A,R2MOV P2,AMOV A,@R0MOV DPTR,#TABLEMOVC A,@A+DPTRMOV P0,AACALL DELAYRETDELAY:MOV R5,#9FHDJNZ R5,$RETTABLE:DB0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H ,80H,90H,88H,83H,0C6H,0A1H,86H,8EH ENDT2捕捉方式:T2CON EQU 0C8HTH2 EQU 0CDHTL2 EQU 0CCHRCAP2H EQU 0CBHRCAP2L EQU 0CAHTR2 BIT 0CAHORG 0000HLJMP MAINORG 000BHLJMP T0_INTORG 0030H MAIN: MOV TMOD, #01HMOV T2CON,#0FHJB ,$STR: MOV TL0, #17HMOV TH0, #0FCHMOV TH2, #00MOV TL2 ,#00MOV 50H,#00HMOV 51H,50HCLRSETB EASETB ET0JNB , $SETB TR0SETB TR2JB , $CLR TR0MOV 50H,RCAP2LMOV 51H,RCAP2HLCALL ZHUANHUAN LOOP1: LCALL DISPJB ,STRAJMP LOOP1T0_INT: MOV TL0, #17HMOV TH0, #0FCHSETBNOPNOPCLRRETI ZHUANHUAN: CLR A百度文库- 好好学习,天天向上-9 MOV 38H,51H MOV 37H,50H MOV 34H,#0 MOV 35H,#0 MOV 36H,#0 MOV R7,#16LOOP2: CLR CMOV A,37HRLC AMOV 37H ,AMOV A,38HRLC AMOV 38H ,AMOV A,36HADDC A,36HDA AMOV 36H,AMOV A,35HADDC A,35HDA AMOV 35H,AMOV A,34HADDC A,34HDA AMOV 34H,ADJNZ R7 ,LOOP2MOV R1,#35HMOV R0,#36HMOV A,#00XCHD A,@R0MOV 58H,AMOV A,@R0SWAP AMOV 57H,AMOV A,#00XCHD A,@R1MOV 56H,AMOV A,@R1SWAP AMOV 55H,AMOV A,#00MOV R0,#34HXCHD A,@R0MOV 54H,AMOV A,@R0SWAP AMOV 53H,ARETDISP: MOV R0,#53HMOV R2,#01HLOP11: MOV A,#0FFHMOV P0,AMOV A,R2MOV P2,AMOV A,@R0MOV DPTR,#TABMOVC A,@A+DPTRCJNE R0,#55H,LOP21ANL A,#7FHLOP21: MOV P0,AACALL DELAYINC R0MOV A,R2JB ,EXIT1RL AMOV R2,AAJMP LOP11EXIT1: RETDELAY: MOV R7,#0FEHLOOP: MOV R6,#70HDJNZ R7,LOOPRETTAB:DB0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8 H,80H,90H,88H,83H,0C6H,0A1H,86H,8EH END。
stc8 pca脉冲宽度-回复什么是STC8 PCA脉冲宽度?STC8是一款由STC公司推出的高性能单片机,而PCA(Pulse-Code Modulation)脉冲宽度调制是一种常见的数字调制技术。
将它们结合使用,就可以实现多种应用,例如控制电机速度、音频编码等。
在本文中,我们将详细介绍STC8 PCA脉冲宽度调制的原理和实现方法。
首先,我们需要理解PCA脉冲宽度调制的基本原理。
PCA是一种将模拟信号转换为数字信号的技术。
它通过对一个周期的脉冲宽度进行编码,将模拟信号的幅度信息转换为数字信号的占空比。
这样,我们可以用数字信号来模拟模拟信号的变化,从而实现信号的数字传输和处理。
在STC8单片机中,PCA模块是其内部集成的一个特殊功能模块。
它能够通过硬件自动产生PWM脉冲,并且具有多种工作模式和功能。
它的主要工作原理是通过选择不同的时钟源和计数器配置来产生不同频率和占空比的PWM波形。
STC8 PCA模块具有较高的精度和稳定性,能够满足多种应用的需求。
下面,我们将详细介绍STC8 PCA脉冲宽度调制的步骤。
步骤一:使能PCA模块首先,在使用PCA脉冲宽度调制之前,需要使能STC8单片机的PCA模块。
可以通过设置相应的寄存器来实现使能操作。
具体的操作步骤可以参考STC8的用户手册或者开发工具的相关文档。
步骤二:选择时钟源在使用PCA模块进行脉冲宽度调制之前,需要选择适当的时钟源来提供时钟信号。
STC8单片机的PCA模块可以支持多种时钟源,如系统时钟、外部时钟等。
选择不同的时钟源可以实现不同的PWM波形频率和精度。
选择合适的时钟源需要根据具体的应用需求进行。
步骤三:配置计数器和比较器在开始使用PCA模块进行脉冲宽度调制之前,还需要配置计数器和比较器的参数。
计数器决定了PWM波形的周期,比较器决定了PWM波形的占空比。
STC8单片机的PCA模块具有多个可配置的计数器和比较器,可以通过设置相应的寄存器来完成配置。
单片机PWM调光程序一、概述PWM(Pulse Width Modulation,脉宽调制)是一种常用的调光技术,通过控制信号的脉冲宽度来调节输出电平的平均值,从而实现对光源亮度的调节。
本文将介绍如何编写单片机PWM调光程序,并提供一个基于XX单片机的示例代码。
二、硬件准备1. 单片机:XX单片机(型号)2. 光源:LED灯(型号)3. 光敏电阻:用于实时检测环境光强度的元件4. 电路连接:将单片机的PWM输出引脚连接到LED灯的控制引脚,将光敏电阻连接到单片机的模拟输入引脚三、软件设计1. 引入头文件:根据单片机型号,引入相应的头文件,例如"xx.h"。
2. 定义宏:定义LED灯的控制引脚和光敏电阻的模拟输入引脚。
3. 初始化:设置单片机的引脚模式和PWM参数,例如设置PWM频率、占空比等。
4. 光敏检测:通过模拟输入引脚读取光敏电阻的电压值,将其转换为环境光强度的数值。
5. PWM调光:根据光敏检测到的环境光强度数值,计算对应的PWM占空比,并将其输出到LED灯的控制引脚。
四、示例代码```c#include <xx.h> // 引入相应的头文件#define LED_PIN 1 // 定义LED灯的控制引脚#define LDR_PIN 2 // 定义光敏电阻的模拟输入引脚void init_pwm() {// 设置引脚模式为PWM输出pinMode(LED_PIN, PWM_OUTPUT);// 设置PWM参数pwmSetMode(PWM_MODE_MS);pwmSetClock(100); // 设置PWM频率为100HzpwmSetRange(1024); // 设置PWM占空比范围为0-1024 }int read_ldr() {// 读取光敏电阻的电压值int ldr_value = analogRead(LDR_PIN);// 根据电压值转换为环境光强度数值int light_intensity = map(ldr_value, 0, 1023, 0, 100);return light_intensity;}void adjust_brightness(int light_intensity) {// 根据环境光强度计算PWM占空比int pwm_duty_cycle = map(light_intensity, 0, 100, 0, 1023);// 输出PWM占空比到LED灯的控制引脚pwmWrite(LED_PIN, pwm_duty_cycle);}int main() {init_pwm(); // 初始化PWMwhile (1) {int light_intensity = read_ldr(); // 光敏检测adjust_brightness(light_intensity); // PWM调光}return 0;}```五、使用方法1. 将示例代码中的XX单片机型号替换为实际使用的单片机型号。
单片机中的计数器与脉冲宽度测量计数器和脉冲宽度测量是单片机中常用的功能模块之一。
计数器可以用于对信号的计数和计时,而脉冲宽度测量可以用于测量信号的高电平或低电平脉冲宽度。
本文将介绍计数器的原理和应用,以及脉冲宽度测量的方法和技巧。
一、计数器的原理与应用计数器是一种用于计数和计时的电子器件,广泛应用于单片机系统中。
单片机中常用的计数器有定时器/计数器模块,可以通过编程来控制计数器的功能和工作方式。
计数器的原理是基于时钟信号进行计数。
时钟信号可以是外部信号源,也可以是内部时钟源。
计数器在每次接收到时钟信号时,根据设定的计数方式进行计数。
计数可以是递增也可以是递减,根据具体应用的需求进行选择。
计数器的应用非常广泛,常见的应用场景包括:1. 频率测量:通过计数器来测量信号的频率。
2. 周期测量:通过计数器来测量信号的周期。
3. 脉冲宽度测量:通过计数器来测量信号的高电平或低电平脉冲宽度。
4. 脉冲个数测量:通过计数器来测量信号的脉冲个数。
5. 定时器:通过计数器来实现精确的定时功能。
二、脉冲宽度测量的方法和技巧脉冲宽度测量是单片机中常用的应用之一,可以用于测量信号的高电平或低电平脉冲宽度。
下面介绍两种常用的脉冲宽度测量方法和技巧。
1. 利用捕获/比较模式:现代的单片机通常会配备捕获/比较模块,可以用于测量信号的脉冲宽度。
通过设置定时器的计数方式和捕获/比较模式,可以实现对信号脉冲宽度的测量。
2. 利用外部中断:单片机通常具有外部中断功能,可以用于检测外部信号的边沿触发。
通过设置外部中断的触发方式和中断服务程序,可以实现对信号脉冲宽度的测量。
中断服务程序可以在触发边沿时开始计时,直到下一个触发边沿时停止计时,得到信号的脉冲宽度。
脉冲宽度测量的技巧包括:1. 选择适当的计数精度:计数器的精度越高,脉冲宽度测量的准确性越高。
根据具体应用需求,选择适当的计数精度。
2. 注意信号的稳定性:脉冲宽度测量需要信号稳定,避免信号发生抖动或干扰。

单片机课程设计报告设计课题:脉冲宽度测量学院:物理与电气工程学院年级专业:10级自动化3班小组成员姓名:金祁平、胡坤云、刘兵剑、王文建小组成员学号:080310173、080310176、080310139、080310132指导老师:丁文祥设计时间:2012年12月摘要二十世纪跨越了三个“电”的时代,即电气时代、电子时代和现已进入的电脑时代。
但是,实际工作中并不是任何需要计算机的场合都要求计算机有很高的性能,一个控制电冰箱温度的计算机难道要用P4吗?应用的关键是看是否够用,是否有很好的性能价格比。
单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上。
概括的讲:一块芯片就成了一台计算机。
它的体积小、质量轻、价格便宜、为学习、应用和开发提供了便利条件。
自从1976年问世以来,单片机获得了巨大的发展。
现在比较流行的单片机是美国Intel的MCS51/96以及Motorola的MC系列,Zilog的Z8系列,同时还有更多新型的、功能更强的单片机不断出现。
Abstract:Twentieth century across the three “power” of the era, that the age of electricity, the electronic age and has now entered the computer age. However, the actual work where the computer is not any need to require a high performance computer, a control fridge temperature P4 computer do you use? The key is to see whether the application of adequate, whether there is a very good cost performance. Single chip, also known as single-chip microcontroller, it is not the completion of a logic function of the chip, but a computer system integrated into a chip. Speaking in general terms: a single chip into a computer. Its small size, light weight, cheap, for learning, application and development of facilities provided. Since its inception in 1976, SCM was a great development. SCM is now more popular in the United States, and Motorola, Intel’s MCS51/96 MC series, Zilog’s Z8 series, as well as more new, more powerful microcontrollers continue to emerge.关键字:单片机,脉冲宽度,系统设计。
单片机小系统之脉冲宽度测量一、功能说明该系统可以测试出按键按下的时间长短即脉冲宽度。
二、参数精度:0.01s量程:20s显示位数:四位数字显示测试实例用时:25.88ms三、方案论证和比较使用方案:使用单片机--延时程序--完成,用汇编语言编写软件程序并连接硬件电路。
将mini 80E升级版单片机板块与计算机连接通讯,从而大到测量脉冲宽度的目的。
其他方案:<一>、利用8051单片机定时器T0测量某正脉冲的宽度原理:分别用脉冲的上升沿和下降沿出发单片机,上升沿给出中断1开始计数,下降沿给出中断2停止计数,最后换算出高电平宽度=计数周期数×一个计数的时间。
<二>、利用泰伯效应的测量方法将待测激光光源发射的激光脉冲通过光栅后到达置放在距光栅为n倍泰伯距的探测器。
探测器测得通过光栅透明部分和不透明部分两者衍射光强的比值S(T),再由S(T)与T之间的关系曲线求得脉冲时间宽度T的值。
现用方案的优点:○1无需使用定时器;○2操作简单现用方案的缺点:有误差,程序繁琐。
四、硬件电路(如下图所示)五、软件程序及其流程图ORG 0000HLJMP STARTORG 0003HSTART:MOV R0,#40H LOOP1:MOV @R0,#00HINC R0CJNE R0,45H,LOOP1MOV A,#10SETBP3.0SETB P3.1↓ MOV TMOD,#00HMOV TH0,#0F0HMOV TL0,#0CHSETB TR0ACALL NEXTJB P3.0,$LP1: JBC TF0,LP2JB P3.1,LP1MOV R0,#40HLOOP2:MOV @R0,#00HINC R0CJNE R0,45H,LOOP2ACALL NEXT LP2:INC 45HCJNE A,45H,L1MOV 45H,#0INC 44HCJNE A,44H,L1MOV 44H,#0INC 43HCJNE A,43H,L1MOV 43H,#0INC 42HCJNE A,42H,L1MOV 42H,#0INC 41HCJNE A,41H,L1MOV 41H,#0INC 40HL1: MOV TH0,#0F0H MOV TL0,#0CHLCALL NEXTJNB P3.0,LP1L2:LCALL NEXTJMP L2NEXT:PUSH ACCMOV R7,#6MOV R1,#40H MOV R0,#0 LOOP:MOV A,@R1MOV DPTR,#TAB MOVC A,@A+DPTR CJNE R1,#43H,L4 XRL A,#80HL4: MOV P0,AMOV P2,R0 ACALL DELAY INC R0INC R1JB P3.1,NEXT1MOV R0,#40HLOOP3:MOV @R0,#00HINC R0CJNE R0,45H,LOOP3ACALL NEXTLJMP L3NEXT1:DJNZ R7,LOOPPOP ACCL3: RETTAB:DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH DELAY:MOV R3,#0FFHLOOP4:MOV R4,#0FFHLOOP5: NOPDJNZ R4, LOOP5DJNZ R3, LOOP4RETEND六、最终结果(图片展示)七、参考文献 单片机原理10级电信(二)班宋李,赵伟,周建,张锦。
学院名称:专 业:班 级:姓 名:学 号:指导教师:2009年 11 月脉冲宽度测量目录第一章 引言……………………………………………第二章 方案选择及总体设计…………………………2.1 硬件技术指标……………………………………JIANGSU TEACHERS UNIVERSITY OF TECHNOLOGY 单片机课程设计报告2.2 方案选择及工作原理……………………………2.3 系统实现功能……………………………………第三章控制系统的硬件设计…………………………3.1 系统模块构成……………………………………3.2 系统工作原理图…………………………………3.3 管脚说明…………………………………………第四章软件设计及程序………………………………4.1 软件设计流程……………………………………4.2 各子程序功能描述………………………………4.2.1 定时器T0中断服务程序……………………4.2.2 显示子程序……………………………………4.3 系统总程序…………………………………………第五章系统制作与调试…………………………………5.1 硬件调试……………………………………………5.1.1 调试方法………………………………………5.1.2 出现问题及解决方法…………………………5.2 软件调试……………………………………………5.3 结果分析……………………………………………第六章总结与体会………………………………………第一章引言近年来随着科技的飞速发展,单片机的应用正在不断地走向深入,同时带动传统控制检测日新月益更新。
在实时检测和自动控制的单片机应用系统中,单片机往往是作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构,以及针对具体应用对象特点的软件结合,加以完善。
本系统采用单片机A T89C51为中心器件来设计脉冲宽度测量器,系统实用性强、操作简单、扩展性强。
在现有的单片机仿真机系统上掌握相关软硬件设计与调试知识,根据所选择题目,焊接好硬件电路,正确进行元器件的测试与调试,并在计算机上编写汇编程序调试运行,并实现参考选题中要求的设计。
单片机常见输入输出模式单片机(Microcontroller,简称MCU)是一种集成电路,集中了处理器、内存、输入输出接口和定时器等功能模块,广泛应用于各种电子设备中。
输入输出(Input/Output,简称I/O)是单片机与外部环境进行信息交互的重要方式。
本文将介绍单片机常见的几种输入输出模式。
1. 并行输入输出模式并行输入输出模式是最常见的单片机与外设进行数据交互的方式。
在并行输入输出模式下,单片机与外设之间通过多个数据线同时传输多位数据。
这种模式的好处是传输速度快,但需要较多的引脚资源,适用于对传输速度要求较高的应用。
2. 串行输入输出模式串行输入输出模式是一种将数据逐位进行传输的方式。
在串行输入输出模式下,单片机与外设之间通过单个数据线逐位传输数据。
这种模式的好处是占用较少的引脚资源,适用于空间有限且对传输速度要求不高的应用。
3. 通用异步收发器模式通用异步收发器(UART)是一种单片机常用的输入输出模式。
UART内部有一个缓冲区,可以接收和发送数据。
在使用UART进行数据传输时,单片机通过配置相关寄存器的参数来设置波特率、数据位数、停止位等通信参数,然后可以通过读写缓冲区来进行数据的收发。
4. 并行输入捕获/输出比较模式并行输入捕获(Input Capture)和输出比较(Output Compare)是单片机中常用的定时器功能模式。
在这种模式下,单片机可以通过定时器模块捕获外部信号的边沿触发事件,并记录下触发事件的时间戳。
同时,单片机还可以通过定时器模块产生输出信号,并与外部信号进行比较。
这种模式适用于需要对时间进行精确控制的应用,如测量脉冲宽度、频率测量等。
5. 脉冲宽度调制模式脉冲宽度调制(Pulse Width Modulation,简称PWM)是一种将数字信号转化为模拟信号的技术。
在PWM模式下,单片机通过定时器模块产生周期固定的脉冲信号,并通过改变脉冲的占空比来模拟出不同的电平信号。
51单片机脉冲宽度调制(PWM)控制LED灯亮度作者:来源:本站原创点击数:576 更新时间:2009年06月28日/*介绍一个51系列单片机采用脉冲宽度调制(PWM)方式控制LED灯亮度的一个程序,大家都知道,51单片机本身是没有pwm接口的,这个程序是通过软件模拟pwm.在一定的频率的方波中,调整高电平和低电平的占空比,即可实现LED灯亮度控制。
程序出自:单片机网http://www. ,如有问题可在论坛提出,程序中使用定时器0产生2.5ms周期脉冲,使用占空比控制变量scale控制占空比,在低电平期间使LED灯亮,在高电平期间使LED灯灭,改变scale 就改变了高电平与低电平的时间,因此也就控制了LED灯的亮度。
*/#include "AT89X51.H" //模拟PWM输出控制灯的10个亮度级unsigned int scale; //占空比控制变量void main(void) // 主程序{ unsigned int n; //延时循环变量TMOD=0x02; //定时器0,工作模式2(0000,0010),8位定时模式TH0=0x06; //写入预置初值6到定时器0,使250微秒溢出一次(12MHz)TL0=0x06; //写入预置值TR0=1; //启动定时器ET0=1; //允许定时器0中断EA=1; //允许总中断while(1) //无限循环,实际应用中,这里是做主要工作{ for(n=0;n<50000;n++); //每过一段时间,就自动加一个档次的亮度scale++; //占空比控制变量scale加1if(scale==10) scale=0; //如果scale=10,使scale为0} }timer0() interrupt 1 //定时器0中断服务程序{ static unsigned int tt ; //tt用来保存当前时间在一秒中的比例位置tt++; //每250微秒增加1if(tt==10) //2.5毫秒的时钟周期{ tt=0; //使tt=0,开始新的PWM周期P2_0=0; //使LED灯亮}if(scale==tt) //按照当前占空比切换输出为高电平P2_0=1; //使LED灯灭}/*程序中从tt=0开始到scale为低电平,从scale开始到tt=10为高电平,由于scale是变量,所以改变scale就可以改变占空比。
用T0的门控位GATE,测量从INT0引脚上出现的外部正脉冲宽度,并将结果(以机器周期数的形式)存放在20H和21H两个单元中。
解:T0设为对系统时钟计时,方式1(16位),T0初值为0
GATE=1且TR0=1时,外部信号启、停T0。
当P3.2(INT0)端出现高电平,则T0工作;到P3.2端出现低电平,T0停止计数。
这时读出TH0、TL0的值,乘以机器周期,则为脉冲宽度时间。
ORG 0000H ;主程序入口
LJMP START
ORG 0030H
START:MOV TMOD,#09H ;T0方式1,定时
MOV TL0,#00H ;定时器赋初值
MOV TH0,#00H
MOV R0,#20H ;存脉冲宽度的地址
LOOP1:JB P3.2,LOOP1 ;等INT0上变为低电平
SETB TR0 ;启动T0(没真正开T0)
LOOP2:JNB P3.2,LOOP2 ;等INT0上变为高电平(开T0)
LOOP3:JB P3.2,LOOP3 ;等INT0上变为低电平(关T0)
CLR TR0 ;关T0(以免INT0再启动T0)
MOV @R0,TL0 ;存结果
INC R0
MOV @R0,TH0
END
开始TR0=1,开T0,并没有真正开,等到INT0也为1,这时才开
到INT0=0就关T0。
但INT0还在不断的输入脉冲,又有可能打开T0,只有马上用TR0=0关了T0,才不会因INT0=1再一次开T0。
基于单片机的PWM变频调速设计引言随着工业现代化进程的不断推进,电机在控制领域中的地位越来越重要。
尤其是在工业生产中,电机广泛应用于各种机械设备中,成为机器人、自动化、计算机数控和其他诸多领域的核心部件。
在电机控制技术中,PWM变频调速技术是一项重要的技术之一。
本文将介绍基于单片机的PWM变频调速设计方案。
PWM变频调速技术概述PWM变频调速技术是一种常用的电机控制技术,它通过控制电机的电压和频率来实现电机调速。
PWM是脉冲宽度调制(Pulse Width Modulation)的缩写。
PWM调速的基本原理是:控制电机输入电压的高低电平占空比,通过增加高电平时间和减少低电平时间,将交流电转换为类似直流电的脉冲信号,通过改变高电平时间和低电平时间的比例,进而调节电机的转速。
PWM变频调速技术的主要优点是:调速性好、运转平稳、效率高、噪音小、寿命长等。
因此,它广泛应用于各种类型的电机控制中。
基于单片机的PWM变频调速设计基于单片机的PWM变频调速设计方案主要包括三个部分:电路设计、控制程序设计和调试测试。
下面分别介绍这三个部分的具体内容。
电路设计基于单片机的PWM变频调速电路设计包括三个主要部分:电源部分、控制部分和驱动部分。
电源部分:主要是提供电压稳定的电源。
电源电压需要根据电机的额定电压来设计,同时需要具备一定的稳定性。
控制部分:主要包括单片机和控制电路,其中单片机可以根据需要选择8051或者AVR等常用的型号,控制电路主要是为了控制电机的频率、占空比等参数。
驱动部分:主要是将控制信号转变为电机驱动信号。
在选择电机驱动芯片时需要考虑驱动能力与芯片成本的平衡,可以选择L298N或MOS。
控制程序设计基于单片机的PWM变频调速控制程序设计主要包括以下工作:1.根据PWM变频调速技术的原理,编写程序实现占空比和频率的控制。
2.编写中断服务程序,完成电机转速反馈信号、过流保护等功能。
3.根据需求编写界面程序,实现电机开关控制、速度选择、过电流保护等功能。
单片机脉冲宽度调制脉冲宽度调制(PWM)是一种常用的调制技术,广泛应用于工业控制、无线通信和电力电子等领域。
而单片机作为实现PWM的重要工具,其强大的计算和控制能力,使其成为PWM应用中不可或缺的一部分。
I. 介绍脉冲宽度调制脉冲宽度调制是一种通过脉冲的高电平时间占总周期的比例来控制输出信号的一种技术。
它通过改变脉冲的宽度来实现模拟信号的数字化,从而实现对电压、电流等物理量的精确控制。
脉冲宽度调制通常分为两种类型:单边调制和双边调制。
II. 单片机实现脉冲宽度调制的原理脉冲宽度调制的实现需要借助于单片机的计时/计数功能。
单片机通过设定计时器的计数值和预分频值,可以控制输出引脚在一个周期内处于高电平和低电平的时间。
III. 单片机脉冲宽度调制的步骤1. 初始化计时器和预分频器:根据脉冲宽度调制的需求,设置计时器的计数值和预分频值。
2. 设定计时器工作模式:选择适合的计时器工作模式,以满足脉冲宽度调制的要求。
3. 编写中断服务程序:当计时器溢出或达到设定的值时,触发中断,并执行相应的中断服务程序。
4. 调整脉冲宽度:在中断服务程序中,通过改变计时器的计数值,来调整脉冲的宽度。
5. 输出PWM信号:根据计时器的计数值,将输出引脚设置为高电平或低电平,形成脉冲宽度调制的PWM信号。
IV. 单片机脉冲宽度调制的应用1. 电机控制:通过改变PWM信号的占空比,可以调节电机的转速和运行状态。
2. LED亮度控制:通过调节LED的PWM信号的占空比,可以实现不同亮度的LED灯效果。
3. 音频处理:PWM信号可以用于音频的数字化处理和传输。
V. 脉冲宽度调制的优缺点脉冲宽度调制具有以下优点:1. 高精度:脉冲宽度可以根据需求进行微调,实现对物理量的精确控制。
2. 简易控制:通过改变脉冲的宽度,可以快速调整输出信号的特性。
3. 效率高:PWM信号在高电平和低电平之间切换,功率损耗较小。
然而,脉冲宽度调制也存在一些缺点:1. 噪声问题:由于脉冲的切换,可能会引入干扰和噪声,影响系统的稳定性。
AJMP MAIN
ORG 0003H
AJMP INTR0
ORG 0100H
;**********************初始化*********************************
MAIN: MOV DPTR,#TAB
MOV SP,#60H ;
MOV TMOD,#09H;工作在门控方式(GATE=1),定时器t0工作方式1
MOV TL0,#00H ;计数清零
MOV TH0,#01H
MOV IE,#81H ;开放定时器中断和总中断和外部中断0
MOV TCON,#11H
MOV R5,#05H
LOOP: ACALL BCD ;十六位二进制转换十进制的BCD码
ACALL UBCD ;把压缩BCD码转换成非压缩BCD码
LOOP1: ACALL LED ;显示
ACALL DELAY
DJNZ R5,LOOP1
MOV R5,08H
AJMP LOOP
;********************外部中断0服务程序************
INTR0: MOV 41H,TH0
MOV 40H,TL0
MOV TH0,#01H
MOV TL0,#00H;重新将定时器T0赋初值
RETI
;********************二—十进制转换*************
BCD: CLR A ;将41H,40H中值转换成BCD码存入3AH,3BH,3CH中MOV 3EH,40H
MOV 3FH,41H
MOV 3AH,A
MOV 3BH,A
MOV 3CH,A
MOV R7,#16
LOOP2: CLR C
MOV A,3EH
RLC A
MOV 3EH,A
MOV A,3FH
RLC A
MOV 3FH,A
ADDC A,3CH
DA A
MOV 3CH,A
MOV A,3BH
ADDC A,3BH
DA A
MOV 3BH,A
MOV A,3AH
ADDC A,3AH
DA A
MOV 3AH,A
DJNZ R7,LOOP2
RET
;*********************把压缩BCD码转换成非压缩BCD码**********
UBCD: MOV 35H,3AH
MOV A,3BH
ANL A,#0FH
MOV 37H,A
MOV A,3BH
ANL A,#0F0H
SWAP A
MOV 36H,A
MOV A,3CH
ANL A,#0FH
MOV 39H,A
MOV A,3CH
ANL A,#0F0H
SWAP A
MOV 38H,A
MOV A,35H
CJNE A,#00H,CHOOSE;判断第五位是否为零,为零则按照4位有效数值处理,小数点加在第一位(31h)上
MOV A,36H
ADD A,#10
MOV 31H,A
MOV 32H,37H
MOV 33H,38H
MOV 34H,39H
RET
CHOOSE: MOV 31H,35H;第五位不为零,小数点加在第二位(32h)上MOV A,36H
ADD A,#10
MOV 32H,A
MOV 33H,37H
MOV 34H,38H
RET
;*******************数码管显示************
LED: MOV A,31H ;显示第一位(高位)
MOVC A,@A+DPTR
MOV P0,A
MOV A,#0F7H
MOV P2,A
LCALL DELAY
MOV A,32H ;显示第二位
MOVC A,@A+DPTR
MOV P0,A
MOV A,#0FBH
MOV P2,A
LCALL DELAY
MOV A,33H ;显示第三位
MOVC A,@A+DPTR
MOV P0,A
MOV A,#0FDH
MOV P2,A
LCALL DELAY
MOV A,34H ;显示第四位
MOVC A,@A+DPTR
MOV P0,A
MOV A,#0FEH
MOV P2,A
LCALL DELAY
RET
;****************延时********************
DELAY: MOV R6,#2
DELAY1: MOV R4,#250;;;;;;延时时间:2*250*2=1ms
DJNZ R4,$
DJNZ R6,DELAY1
RET
TAB:DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH;不带小数点的字型码DB 0BFH,86H,0DBH,0CFH,0E6H,0EDH,0FDH,87H,0FFH,0EFH;带小数点的字型码END。