基于超声波的汽车倒车主动防御系统
- 格式:pdf
- 大小:1.69 MB
- 文档页数:3
基于超声波传感器的汽车倒车防撞报警器1.引言由于社会的进步,经济的发展和生活水平的不断提高,汽车数量逐年增长,造成道路交通拥挤不堪,交通事故频繁发生。
汽车倒车报警器:在倒车时不断测量汽车尾部与其后面障碍物的距离,并随时显示其距离,在不同的距离范围内发出不同的报警信号,以提高汽车倒车时的安全性的仪器。
本警器由单片机来控制。
整个控制系统由超声波发射电路、超声波接收电路、报警电路、复位电路、显示电路组成。
实行实时数字显示测得的距离,在不同的距离范围内发出不同的报警信号,驾驶员可根据个人需要调整设置报警距离,以减少事故的发生。
2.超声波传感器测距系统2.1 超声波测距原理及系统原理框图超声波是人耳听不到的一种声波,人耳的听音范围是20~20000Hz,本设计采用的超声波是40000Hz。
超声波的纵向分辨率较高,对色彩和光照度不敏感,对外界光线和电磁场不敏感,可以用于测量较近目标的距离。
本设计采用的超声波传感器往返距离为5m,在有灰尘、烟雾、强磁场干扰、有毒等各种环境下都能稳定工作。
图 1 超声波传感器内部结构本文采用的传感器模块是压电式超声波发射器。
压电式超声波发生器实际上是利用压电晶体的谐振来工作的。
超声波发生器内部有两个压电晶片和一个共振板。
当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器。
图2 超声波传感器的等效电路2.2 超声波传感器测距方法超声波发生器在某一时刻发出超声波信号,遇到被测物体后反射回来,被超声波接收器接收到。
只要计算出超声波信号从发射到接收到回波信号的时间,知道在介质中的传播速度,就可以计算出距被测物体的距离:d=s/2=(vt)/2其中d为被测物到测距仪之间的距离,s为超声波往返通过的路程,v为超声波在介质中的传播速度,t为超声波从发射到接收所用的时间。

基于超声波测距的汽车倒车防撞报警系统设计一、本文概述本文针对汽车安全驾驶领域的重要需求,详细探讨并设计了一种基于超声波测距技术的汽车倒车防撞报警系统。
随着城市交通环境复杂性的增加以及人们对行车安全意识的提高,如何有效防止因驾驶员视线盲区和操作失误引起的倒车碰撞事故成为研究热点。
本系统利用超声波传感器作为主要探测元件,通过发射和接收超声波信号来精确测量车辆与后方障碍物之间的实时距离,并结合智能算法分析处理这些数据,以便在车辆靠近障碍物到危险距离时及时发出报警提示,辅助驾驶员做出正确决策,从而显著提升倒车安全性。
文章首先阐述了该系统的背景意义和技术原理,随后深入剖析超声波测距方法及其在汽车应用中的优势和挑战接着,详细介绍了系统架构设计,包括硬件组成(如超声波传感器模块、信号处理电路、报警装置等)及软件算法实现通过实验验证了系统的性能指标,探讨其在不同工况下的稳定性和准确性,并对未来可能的优化方向进行了展望。
通过本文的研究,期望能为汽车主动安全技术的发展贡献一份力量,推动相关产品的实际应用与普及。
二、超声波测距原理及技术超声波测距技术是利用超声波在空气中的传播特性来实现距离测量的方法。
超声波是一种频率高于人耳能听到的上限(约20kHz)的声波,它在空气中的传播速度相对恒定,约为343米秒。
这一特性使得超声波非常适合用于精确的距离测量。
超声波测距的基本原理是发射器发射出一定频率的超声波,当这些波遇到障碍物时会发生反射,反射波被接收器接收。
通过测量超声波发射和接收之间的时间差,可以计算出超声波传播的距离。
由于超声波的传播速度是已知的,因此可以通过以下公式计算距离:这里的“时间差 2”是因为超声波需要从发射器传播到障碍物,再从障碍物反射回接收器,所以总时间是往返时间。
在汽车倒车防撞报警系统中,超声波传感器通常被安装在汽车的尾部。
当驾驶员开始倒车时,系统会自动激活传感器,传感器开始发射超声波。
超声波遇到车辆后方的障碍物时反射回来,被传感器接收。
基于超声波测距的汽车倒车防撞报警系统设计汽车倒车防撞报警系统是一种基于超声波测距技术的安全辅助设备,能够帮助驾驶员在倒车时避免与障碍物发生碰撞,提高行车安全性。
本文将对该系统的设计进行详细介绍。
首先,该系统主要由超声波传感器、控制器和报警器组成。
超声波传感器负责探测车辆周围的障碍物距离,传输给控制器进行处理。
控制器根据传感器的数据判断是否存在碰撞的风险,并通过报警器向驾驶员发出警告信号,提醒其采取正确的行动。
在系统的设计过程中,首先需要选择合适的超声波传感器。
传感器的选择应考虑其测距范围、精度和对环境的适应性等方面。
一般来说,超声波传感器在测距范围内可以提供较高的测量精度,并且对大多数障碍物均有良好的适应性。
接下来,控制器的设计是系统中的关键部分。
控制器需要实时接收传感器上传的距离数据,并进行数据处理和决策。
控制器可以使用嵌入式系统来实现。
在数据处理方面,可以使用一些常见的算法,如滤波算法、虚拟线算法等,来进行数据处理和障碍物的识别。
在决策方面,可以设置适当的距离阈值,当距离低于该阈值时触发警报。
最后,报警器的设计需要考虑其音量和可靠性。
对于音量,报警器应具备足够的声音大小,以确保驾驶员能够听到警报并及时做出反应。
对于可靠性,报警器应具备较长的寿命和稳定的性能,以确保系统能够长时间稳定运行。
此外,为了提高系统的可用性,还可以考虑加入其它功能,如图像显示功能。
通过搭载摄像头和显示器,可以将车辆周围的情况实时显示在显示器上,使驾驶员更加直观地了解障碍物的位置和距离。
总之,基于超声波测距的汽车倒车防撞报警系统是一种重要的安全辅助设备。
通过合理选择超声波传感器、设计有效的控制器和报警器,并加入其它功能,可以实现对倒车过程的有效监控和警示,提高驾驶员的行车安全性。
图2超声波发射电路
波频率38kHz与测距的超声波频率40kHz较为接近,所
以可以利用它制作超声波检测接收电路。
CX20106接收超
声波具有很高的灵敏度和较强的抗干扰能力。
为了改变接
收电路的灵敏度和抗干扰能力,可以调整电容C,当无信
号时,输出高电平,当接收到回波信号后跳变为低电平。
图3超声波接受电路
2.3数码显示模块
超声波是机械波的一种是通过机械产生的声波,当他在空气中传播的时候,会受到空气温度和环境的影响,当
我们需要其进行精确测量的时候,就需要在系统中安装温
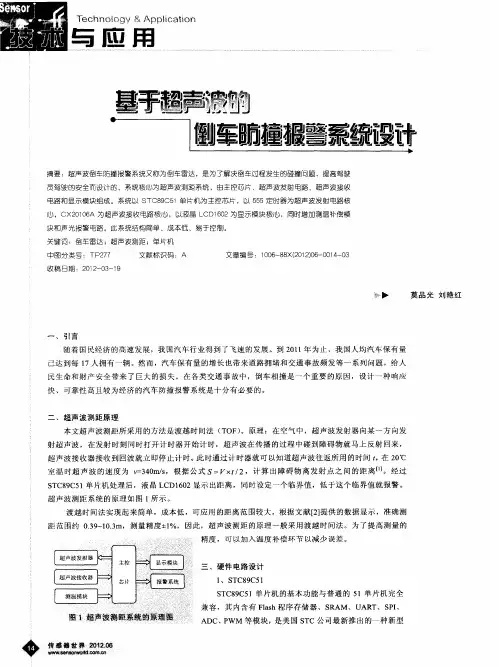
度模块来对当时的声波速度进行校正,来达到精确的目图1超声波测距报警系统原理图
图5超声波测距报警系统程序流程图
图4超声波报警电路
系统软件件设计
软件控制系统是系统的重要组成部分,本次雷达系
统选择运用C语言程序进行系统编写。
在本次设计的雷。
毕业设计开题报告测控技术与仪器基于超声波的汽车倒车防撞报警系统软件设计1选题的背景、意义[1][2]随着经济的发展,人们的生活水平越来越高。
当今,对许多人来说,汽车进入家庭已不再是奢望,汽车的数量在大幅攀升,交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失。
因此随之而来的事情就是如何保证汽车使用过程中的安全问题,特别是如何防止汽车与其他物体碰撞的事情发生。
据初步调查统计,l5%的汽车事故是由汽车倒车"后视"不良造成的。
因此,增强汽车的后视能力,对于提高行车安全,减轻司机的劳动强度和心理压力,是十分重要的。
如果车辆能适时检测与周围障碍物的距离并给出警告信息,使司机及早采取行动,可避免车辆相撞事故的发生。
随着科学技术的发展,用超声波进行无接触测量得到了广泛的应用。
超声波是由机械振动产生的,可在不同介质中以不同的速度传播,它具有定向性好、能量集中、在传输过程中衰减较小,反射能力较强,在恶劣工作环境下具有一定的适应能力等优点。
因此可用于液位测量、车辆自动导航等领域。
利用超声波测距技术的汽车倒车防撞雷达(以下简称倒车雷达),近年来逐渐在行业风行。
一些名车如奔驰、法拉利、本田雅阁等相继采用了该系统用于辅助倒车,在现时的车展上屡见不鲜。
究其原因是因为倒车镜有死角,驾车者目测距离有误差等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来许多麻烦,例如撞上别人的车、消防水笼头,如果伤及儿童更是不堪设想。
据此,这些车厂将倒车雷达作为一个卖点,声称倒车雷达在车主的一生中只要发挥一次作用就很值得了。
既然倒车雷达能够增加汽车的整体安全性能,何以只到近年才得以发展呢?众所周知,超声波测距技术由来已久,多年来已在一些领域得到应用。
例如利用超声波技术的自动测距照相机、建筑商使用的手持式墙面测距仪。
而用于汽车防撞却是近年的事。
这主要原因是传统的超声波传感器不能达到汽车行业的特殊要求。
基于单片机的超声波倒车防撞系统设计摘要:本文设计是基于 51 单片机,设计的一个简易的超声波倒车报警防碰撞安全系统。
在车尾分别安装超声波和热释电模块,测量障碍物距离是使用 HC-SR04超声波模块,使用 HC-SR501 热释电模块来检测是否有人体靠近。
该防碰撞系统通过对模块返回的数据分析然后通过无源蜂鸣器进行报警提示,并在 LCD1602液晶屏上显示报警等数据,提示车主障碍物的出现以及时地做出反应。
关键字:HC-SR04 超声波模块;LCD1602液晶显示屏;51单片机最小系统板1.项目背景:近年来随着车辆的增加,不论是汽车还是其它类型车辆,驾驶员都会面临倒车这一挑战,在倒车过程中驾驶员并不能很好的掌握后方车尾情况,车尾部分位置处于驾驶员的视野盲区,而且许多驾驶人员在倒车这一方面并不熟练,因此造成了许多事故的发生,全球每年由于倒车事故造成的人员和财产损失的数目是惊人的,因此,车辆倒车问题已引起人们的高度重视。
对大量交通事故的分析表明,80%以上的车祸是由于驾驶员反应不及时引起的,超过65%的车辆相撞属于追尾相撞,其余则属于侧面相撞和正面相撞。
有关研究表明,若驾驶员能够提早1s 意识到有事故危险并采取相应的措施,则 90%的追尾事故可以避免。
2.项目目的:为了减少驾驶员倒车交通事故,车载系统的功能需得到改善。
在驾驶员信息系统的关键技术挑战是降低生产成本,同时提供智能安全的系统。
例如,目前国内大多数普通汽车和一些小型车辆并没有类似的倒车报警防撞系统,国外绝大多数车辆也并没有此种防撞系统,一方面是部分车辆公司并没意识到倒车的安全隐患,另一方面便是报警防撞系统过于昂贵,而我们所设计的倒车防撞系统,不仅价格低廉,而且具有极高的安全性能。
防撞系统开发技术的主要挑战是降低成本的同时,也提高了感应功能,以提高准确性和可靠性。
车辆将共享许多防撞系统的传感元件,可以不断地评估不断变化的环境和驾驶环境。
这样就会大大提高汽车倒车的安全性,减少车祸的发生。
基于AT89C2051的倒车防撞超声波报警系统
本方案所设计的倒车防撞报警系统采用软、硬件结合的方法,具有模块化和多用化的特点。
设计中介绍了超声波检测的发展及基本原理,阐述了超声波传感器的原理及特性。
对于系统的一些主要参数进行了讨论,并且在介绍超声波测距系统功能的基础上,提出了系统设计的总体构成,本方案的提出将对汽车主动防撞乃至自动驾驶产生,给驾驶者提供一个倒车的操作指令。
1.引言
众所周知,要检测两头之间是否有障碍物,一般的做法是一头发射一个信号,在接收处判断是否有信号接收到,若有信号接收到,说明中间没有障碍物;若接收不到,则说明有障碍物。
然而在汽车倒车防撞报警系统的设计中,由于汽车是一个移动的物体,不可能在某一具体的位置上安装接收或发射装置,这就决定了系统的发射与接收装置必须安装于一起,因此如何设计一款将发射与接收装置安装在一起的物体检测装置是我们的研究方向。
2.超声波测距系统介绍
超声测距从原理上可分为共振式、脉冲反射式两种。
由于应用要求限定,在这里使用脉冲反射式,即利用超声波的反射特性。
超声波测距原理是通过超声波发射传感器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就停止计时。
常温下超声波在空气中的传播速度为
C=340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(S),即:
S=C*t/2 (1-1)
可以看出其主要部分有:(1)供应电能的脉冲发生器(发射电路);。
超声波倒车防撞系统0 引言随着中国汽车数量的不断增多,道路拥堵,交通事故频发,给人们生活带了诸多不便,安全成为了第一要素,汽车防撞系统的设计和需求也迫在眉睫。
因此,设计了一种利用超声波测距,通过单片机实现的倒车防撞报警系统,主要考虑它的设计简单,易于操作。
1 超声波测距原理超声波是指频率高于20 kHz 的机械波。
而倒车时,为了防止撞上障碍物,需要测量障碍物到车之间的距离,这就需要使用超声波传感器。
超声波传感器又称为超声波换能器或超声波探头。
超声波传感器包括超声波发送器和超声波接收器,但一个超声波传感器也可具有发送和接收声波的双重作用。
超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换成振动发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法 (TOF,time offlight)。
超声波发射传感器向某一方向发射超声波,在发射同时开始计时,超声波在空气中传播,传播的途中碰到障碍物就立刻返回来,超声波接收器接收到反射回来的波就立即停止计时,计算出超声波从发射到遇到障碍物返回时所用的时间t,常温下超声波在空气中的传播速度为V=340 m/s,根据公式S =V × t / 2,就可以计算出障碍物到超声波传感器之间的距离。
2 系统总体电路单片机AT89C51 编写程序产生方波,通过P1.0 口输出40 kHz 的脉冲信号,经超声波发射电路中CD4069 放大后驱动超声波发射探头UCM40T,产生超声波。
传播过程中遇到障碍物后产生回波送入超声波接收器,接收探头采用和发射探头配对的UCM40R,将超声波调制脉冲变为交流电压信号,经超声波接收电路中CX20106A 进行处理,通过7 脚输出,作为一个中断请求信号,送至单片机进行处理。
在单片机发射方波的同时,也就是超声波发射电路发射超声波的同时开启单片机内部定时器T0,通过定时器来记录超声波发射的时间和收到反射波的时间。

基于超声波测距的倒车防撞系统的设计论文作者姓名:申请学位专业:申请学位类别:指导教师姓名(职称):论文提交日期:毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日基于超声波测距的倒车防撞系统的设计摘要随着社会经济的发展和交通运输业的不断兴旺,汽车的数量在不断的增加。
交通拥挤状况也日益严重,撞车事件也经常发生,造成了很多不可避免的人声伤亡和经济损失,面对这种情况,设计一种响应快、可靠性高并且比较经济的汽车防撞预警系统显得非常的重要。
毕业设计开题报告测控技术与仪器基于超声波的汽车倒车防撞报警系统硬件设计1前言部分(阐明课题的研究背景和意义)随着我国汽车产业的发展和人民生活水平的不断提高,越来越多的家庭拥有自己的汽车,在享受汽车给我带来便利的同时,一方面汽车的数量逐年增加,公路,街道,停车场和车库拥挤不堪,可转动的空间越来越少,另一方面,新司机非专职司机越来越多,由于倒车而产生的问题也日益突出,倒车引起的纠纷也越来越多。
倒车时,车辆之间,车辆与人之间,车辆与墙壁等障碍物之间的碰撞时有发生,在2002年的车辆事故发生的比例中,倒车引起的事故占21%,到2006年,倒车引起的事故比例占28%,到20008年甚至达到了30%。
倒车已成为一项令人头痛的任务,即使是经验丰富的老司机也在抱怨倒车是一件费力费神的事。
汽车倒车时,由于驾驶员看不见后面的物体和人,往往会引发事故。
由于在视觉盲区,无法看清楚身后的障碍物,司机倒车时很容易刮伤汽车,甚至发生事故,当倒车进入停车场指定泊位时,如果撞到石块或桩基,常常会将车后的消音器,后车灯和后车箱撞坏。
倒车是一个复杂的任务。
他依赖于驾驶员的驾驶经验,驾驶技巧以及反应灵敏程度。
任一环节出现错误都会导致驾驶员无法快速准确的完成倒车任务。
改善倒车遇到的窘境被越来越多的人所关注,人们对汽车操纵的便捷性能提出了更高的要求,希望有种装置能够解决汽车倒车给人们带来的不便,消除驾驶中的不安全因素,解决汽车倒车中存在的困难。
解决汽车的倒车难题目前有两种思路,一是寄希望于汽车自动驾驶技术及其配套设施的日益成熟,目前这项技术仍处于研制开发阶段,短期内尚未能开发应用,第二,据统计,危险境况时,如果能给驾驶员半秒钟的预处理时间,则可减少倒车事故的30%。
所以用简单的汽车倒车预警系统,亦能很大程度地解决倒车难题,但是传统的汽车倒车预警系统的功能简单,驾驶员仍然需要通过后视镜去判断车后的物体,以及通过估计汽车和车后障碍物的距离来完成倒车任务。
基于AT89C51单片机倒车防撞报警系统设计1 引言随着汽车的日益普及,停车场越来越拥挤,车辆常常需要在停车场穿行、掉头或倒车。
由于这些低速行驶的车辆与其它车辆非常接近,而且驾驶员的视野也颇受限制,碰撞和拖挂的事故时有发生,在夜间时则更显突出。
为确保汽车安全,本文将介绍一种超声波测距报警装置,可有效地避免此类事故的发生。
2 功能要求此设计最终要实现在汽车进行倒车时,如果与障碍物的距离小于安全距离时,发出声光报警并显示车辆与障碍物间的距离,提醒驾驶员及时采取减速或刹车的措施。
3超声波简介频率高于20kHz的超声波不仅波长短、方向性好、能够呈射线定向传播,而且碰到界面就有显著的反射。
这些特性有利于选用超声波做媒体,测定物体的位置、距离甚至形状等[1]。
3.1超声波传感器特性超声波传感器的特性有以下四点:(1) 在自身特性谐振点40kHz附近可获得较高的灵敏度;(2) 谐振带宽、波束角可以通过制作工艺控制的很窄,有利于抗声波干扰设计;(3) 不受无限电频谱资源限制,易于抗电磁干扰设计;(4) 超声波系统成本低、性能稳定可靠,应用前景好。
3.2超声波测距基本原理超声波测距的基本原理是超声波发射器不断地发射出40kHz超声波,遇到障碍物后反射回反射波,超声波接收器接收到反射波信号,并将其转变为电信号。
测出发射和接收回波的时间差T,然后求出距离S。
在已知速度C的情况下,不难得出[2]12S CT = (1) (1)式中,C 为超声波音速,由于超声波也是声波,故C 即为音速。
音速为C =(2)(2)式中,γ为气体的绝热体积系数(空气为1.4);p 为气体的气压(海平面为1.013*106Pa); 0ρ气体密度(空气为1.29kg/m 3)。
对于1mol 空气,质量为m ,体积为V ,则密度0/m V ρ= (3)故C ==对于理想气体,有pV RT = (5)(5)式中,R 为摩尔气体常热;T 为绝对温度。
因此,有C = 由于γ、R 、m 均为已知常数,故是声速C 仅与温度T 有关。
基于超声波雷达的汽车主动避撞系统探究摘要:使用超声波雷达的汽车主动避撞系统可以探测一定距离的障碍物,以帮助驾驶者判断车与其他障碍物的距离,降低交通意外发生的概率。
在此背景下,设计了以STM32F103ZET6单片机为核心,该系统通过超声波雷达检测出距离,与内部温度采集模块进行温度补偿,在显示模块中同时监测距离和温度,但距离小于一定值时报警模块可实现报警功能,该系统具有稳定的性能,性价比非常高。
关键词:单片机;超声波雷达测距;OLED显示屏1引言在交通逐渐拥挤的趋势下,智能主动避撞系统应运而生,它能通过摄像头,超声波雷达,红外线,雷达,激光等技术来自动侦测车与其他物的距离,并且在距离达到临界的时候可以通过震动或声音发出警报来提醒驾驶员。
车载超声波雷达防撞系统是通过单片机将各种设备包括传感器等连接起来,具有高智能化高集成度,集声,电,机为一体从而实现了对交通运输的自动化和智能化,它可以应用于所有车辆,主动避撞系统的目的就是为了提高所有驾驶人和乘客的安全系数,并给予更好的驾驶便捷性和舒适性。
2基于超声波雷达的汽车主动避撞系统设计2.1总体设计思路和方法2.1.1设计思路主动避撞系统如今是所有交通工具不可缺少的设施之一,本次研究的主动避撞系统是由超声波雷达来实现测距。
该车载超声波雷达防撞系统的工作原理是在汽车尾部装上超声波雷达测距仪,当有障碍物靠近的时候,超声波雷达测距仪就会发出信号,当信号触碰到障碍物就会反射给超声波雷达测距仪,同时主控芯片单片机进行会对超声波雷达测距仪发射和返回来的信号进行记录并处理,然后与内部温度检测仪出的温度进行温度补偿,从而计算出汽车和物体之间的距离。
2.1.2超声波雷达测距处理方法超声波是波长低于2cm的机械波,也是频率高于20KHz的声波,超声波雷达广泛应用与医疗和工业上,它必须依靠介质进行传播,由物质振动而产生的,所以无法存在于真空(如太空)中,所以无法在真空中使用超声波,但仍然可以使用和电磁波有关的设备,对电磁波技术进行利用。
基于超声波测距的倒车报警系统设计一、本文概述Overview of this article随着汽车工业的快速发展和智能化技术的进步,车辆安全性能越来越受到人们的关注。
倒车安全作为其中的重要环节,直接关系到驾驶员和行人的安全。
因此,设计一种高效、可靠的倒车报警系统显得尤为重要。
本文旨在探讨基于超声波测距技术的倒车报警系统设计。
With the rapid development of the automotive industry and the advancement of intelligent technology, vehicle safety performance is receiving increasing attention from people. Reverse safety, as an important aspect, directly affects the safety of drivers and pedestrians. Therefore, designing an efficient and reliable reverse alarm system is particularly important. This article aims to explore the design of a reverse alarm system based on ultrasonic ranging technology.超声波测距技术以其非接触、高精度、响应速度快等优点,在倒车报警系统中具有广泛的应用前景。
通过发射超声波并接收其回波,可以精确测量车辆与障碍物之间的距离,从而及时提醒驾驶员,避免发生碰撞事故。
Ultrasonic ranging technology has broad application prospects in reverse alarm systems due to its non-contact, high precision, and fast response speed advantages. By emitting ultrasonic waves and receiving their echoes, the distance between the vehicle and obstacles can be accurately measured, thereby timely alerting the driver and avoiding collision accidents.本文将详细介绍基于超声波测距的倒车报警系统的设计原理、硬件组成、软件编程以及实际应用效果。
1绪论1.1 超声波检测发展概述现在,在工业发达国家,无损检测在产品的设计,研制,使用部门已被卓有成效的运用,1981年美国前总统里根在给美国无损检测学会成立40周年大会的贺信中就说过:“无损检测能够给飞机和空间飞行器,发电厂,船舶,汽车和建筑物等带来更大程度的可靠性。
没有它,我们就不可能享有目前在这些领域和其他领域的领先地位。
”无损检测正在以迅猛之势向纵深发展,客观的需要毕竟是一种专业可以发展的最大动力。
超声波检测技术作为无损检测技术的重要手段之一,在其发展过程中起着重要的作用,它提供了评价固体材料的微观组织及相关力学性能、检测其微观和宏观不连续性的有效通用方法。
由于其信号的高频特性,超声波检测早期仅使用模拟量信号的分析,大部分检测设备仅有A扫描形式,需要通过有经验的无损检测人员对信号进行人工分析才能得出正确的结论,对检测和分析人员的要求较高,因此,人为因素对检测的结果影响较大,波形也不易记录和保存,不适宜完成自动化检测。
八十年代后期,由于计算机技术和高速器件的不断发展,使超声波信号的数字化采集和分析成为可能。
目前国内也相继出现了各类数字化超声波检测设备,并成为超声波检测的发展方向。
目前国内外在超声波检测领域都向着数字化方向发展,数字式超声波检测仪器的发展速度很快。
国内近几年也相继出现了许多数字式超声波仪器和分析系统。
随着检测技术研究的不断深入,对超声波检测仪器的功能要求也越来越高。
由于单数码显示的超声检测仪会给测读带来较大的测试误差,因此要求以后生产的超声检测仪能够具有双显及其内部带有单片机的微处理功能。
随后具有检测,记录,存储,数据处理与分析等多项功能的智能化检测分析仪相继研制成功。
超声仪研制呈现一派繁荣景象。
目前,计算机市场价格大幅下降,若采用非一体化超声波检测仪器,则计算机可发挥它一机多用的各种功能,这实际上是最大的节约。
过去那种全功能的仪器设置,还不如单独的超声仪,计算机可充分发挥各自特点。