势函数法
- 格式:doc
- 大小:184.00 KB
- 文档页数:2

基于模式识别的个人认识班级自动化1002班姓名刘永福学号 1009101016摘要:本文主要介绍了模式识别的基本理论概念及算法,通过对模式识别的几种算法的概括、分析,推出算法的要求及步骤,实现样本的基本分类要求。
主要包括模式识别及模式识别系统的基本概念以及应用领域、线性判别函数的介绍及相关算法的推理证明、非线性判别函数的介绍及相关算法的推理证明。
一.模式识别及模式识别系统(1)模式识别的基本概念模式识别是以计算机为工具、各种传感器为信息来源,数据计算与处理为方法,对各种现象、事物、状态等进行准确地分析、判断识别与归类,包括人类在内的生物体的一项基本智能。
对于模式和模式识别有“广义”和“狭义”两种解释:广义地说,存在于时间和空间中可观察的事物,如果可以区别它们是否相同或相似,都可以称之为模式。
此时,模式识别是生物体(包括人)的基本活动,与感觉、记忆、学习、思维等心理过程紧密联系,是透视人类心理活动的重要窗口之一。
从这个角度讲,模式识别是研究生物体如何感知对象的学科,属于认识科学的范畴,是生理学家、心理学家、生物学家和神经生理学家的研究内容,常被称做认知模式识别。
具体来说,它是指人们把接收到的有关客观事物或人的刺激信息与他在大脑里已有的知识结构中有关单元的信息进行比较和匹配,从而辨认和确定该刺激信息意义的过程。
正是通过认知模式识别,我们才能认识世界,才能辨别出各个物体之间的差别,才能更好地学习和生活。
狭义地说,模式是为了能让计算机执行和完成分类识别任务,通过对具体的个别事物进行观测所得到的具有时间和空间分布的信息。
把模式所属的类别或同一类中模式的总体称为模式类(或简称为类)。
计算机模式识别就是指根据待识别对象的特征或属性,利用以计算机为中心的机器系统,运用一定的分析算法确定对象的类别的学科,是数学家、信息学专家和计算机专家的研究内容。
因此,模式识别的研究主要集中在认知模式识别和计算机模式识别这两个方面。
势函数法
一、公式
n m r
B r A U +-=,又叫做Leonard Jones 势函数,模拟原子间的引力和斥力作用,A 、m 分别是斥力系数和阶数,B 、n 分别是吸引力的系数和阶数;
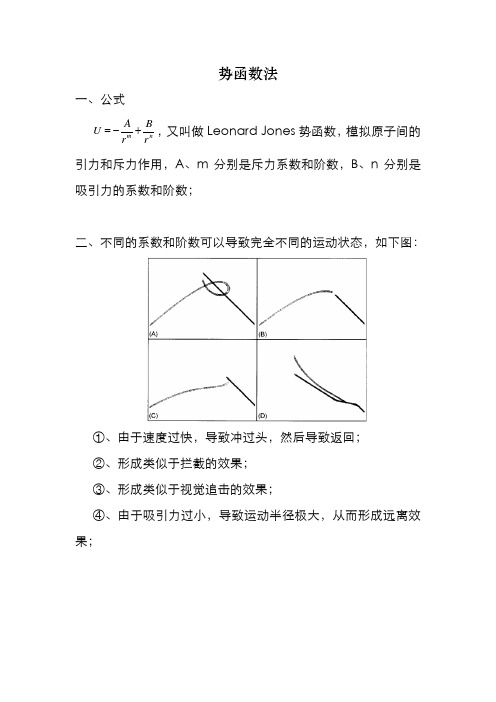
二、不同的系数和阶数可以导致完全不同的运动状态,如下图:
①、由于速度过快,导致冲过头,然后导致返回; ②、形成类似于拦截的效果;
③、形成类似于视觉追击的效果;
④、由于吸引力过小,导致运动半径极大,从而形成远离效果;
只设置斥力,形成类似于避障的效果;
设置四方墙体的势场函数,可以形成反弹的效果;
可以形成类似蜜蜂成群结队的效果;。
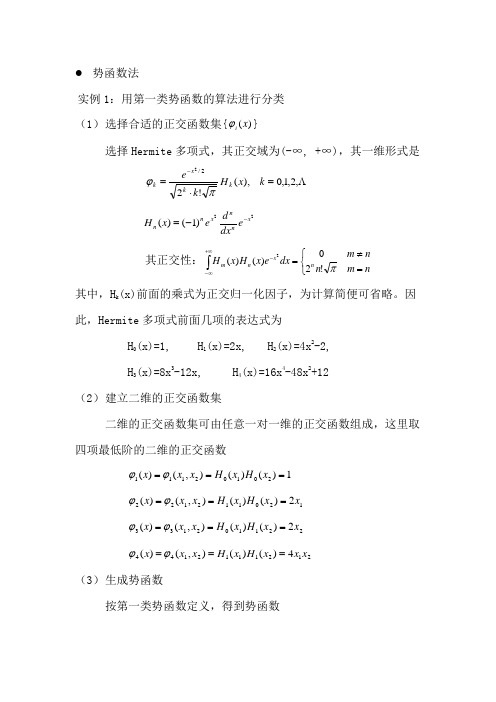
势函数法实例1:用第一类势函数的算法进行分类 (1) 选择合适的正交函数集{)(x i ϕ}选择Hermite 多项式,其正交域为(-∞, +∞),其一维形式是,2,1,0),(!22/2=⋅=-k x H k ek k x k πϕ22)1()(x n n x nn e dxd ex H --= 其正交性:⎰+∞∞--⎩⎨⎧=≠=nm n nm dx e x H x H nx n m π!20)()(2其中,H k (x)前面的乘式为正交归一化因子,为计算简便可省略。
因此,Hermite 多项式前面几项的表达式为H 0(x)=1, H 1(x)=2x, H 2(x)=4x 2-2, H 3(x)=8x 3-12x, H 4(x)=16x 4-48x 2+12(2) 建立二维的正交函数集二维的正交函数集可由任意一对一维的正交函数组成,这里取四项最低阶的二维的正交函数1)()(),()(20102111===x H x H x x x ϕϕ 1201121222)()(),()(x x H x H x x x ===ϕϕ 2211021332)()(),()(x x H x H x x x ===ϕϕ 21211121444)()(),()(x x x H x H x x x ===ϕϕ(3) 生成势函数按第一类势函数定义,得到势函数212121214116441)()(),(k k k k i j i k x x x x x x x x x x x x K +++==∑=ϕϕ其中T x x x ),(21=,T k k k x x x ),(21=(4) 通过训练样本逐步计算累积位势K(x)给定训练样本:ω1类为x ①=(1 0)T , x ②=(0 -1)Tω2类为x ③=(-1 0)T , x ④=(0 1)T累积位势K(x)的迭代算法如下 第一步:取x ①=(1 0)T ∈ω1,故K 1(x)=K(x, x ①)=1+4x 1·1+4x 2·0+16x 1x 2·1·0=1+4x 1第二步:取x ②=(0 -1)T ∈ω1,故K 1(x ②)=1+4·0=1因K 1(x ②)>0且x ②∈ω1,故K 2(x)=K 1(x)=1+4x 1第三步:取x ③=(-1 0)T ∈ω2,故K 2(x ③)=1+4·(-1)=-3因K 2(x ③)<0且x ③∈ω2,故K 3(x)=K 2(x)=1+4x 1第四步:取x ④=(0 1)T ∈ω2,故K 3(x ④)=1+4·0=1因K 3(x ④)>0且x ④∈ω2,故K 4(x)=K 3(x)-K(x,x ④)=1+4x 1-(1+4x 2)=4x 1-4x 2将全部训练样本重复迭代一次,得 第五步:取x ⑤=x ①=(1 0)T ∈ω1,K 4(x ⑤)=4故K 5(x)=K 4(x)=4x 1-4x 2第六步:取x ⑥=x ②=(0 -1)T ∈ω1,K 5(x ⑥)=4故K 6(x)=K 5(x)=4x 1-4x 2第七步:取x ⑦=x ③=(-1 0)T ∈ω2,K 6(x ⑦)=-4故K 7(x)=K 6(x)=4x 1-4x 2第八步:取x⑧=x④=(0 1)T∈ω2,K7(x⑧)=-4故K8(x)=K7(x)=4x1-4x2以上对全部训练样本都能正确分类,因此算法收敛于判别函数d(x)= 4x1-4x2。
数学奇点定义的原理和方法
一、奇点的数学定义奇点是指函数在某点无法定义,或函数极限不存在的点。
它通常发生在函数分母为零或复变函数分析的过程中。
奇点可以分为可除奇点、极值奇点和本性奇点。
二、判断奇点的方法1. 代入法:将奇点代入原函数,如果结果为无意义的形式如0/0或者无限大,则通常为奇点。
2. 极限法:计算函数在该点的左右极限,如果左右极限不相等,则通常为奇点。
3. 抽屉法:设计路径绕过奇点进行积分,如果积分值依赖于路径则存在奇点。
4. 势函数法:根据势函数判断,势函数在该点不连续也提示奇点的存在。
三、可除奇点的判断方法可除奇点是指函数在该点虽不定义,但可以通过合理运算使它定义的奇点。
判断方法是将函数展开为Laurent级数,如果只有有限项负幂,则为可除奇点。
四、极值奇点的判断方法极值奇点是指函数在该点左右极限均无穷大,但两边极限不等。
判断方法是分别计算左右极限,如果一个极限为正无穷大,另一个为负无穷大,则为极值奇点。
五、本性奇点的判断方法本性奇点是最一般的奇点,左右极限不相等,且没有规律。
判断方法是对该点计算极限分析,根据奇点分类定理排除可除奇点和极值奇点后即判定为本性奇点。
综上所述,根据极限法、代入法等可以判断函数的奇点,再根据级数展开和极限特征判断奇点类别,这些是研究奇点的主要方法。
判断奇点对于分析函数的性质有重要意义。
博弈论中的势函数是用来衡量博弈过程中某个状态的稳定性和优劣程度的函数。
构造势函数的方法有很多种,其中一些常见的方法包括:
1. 集合覆盖法:通过将博弈状态空间分解成若干个互不相交的子集,并为每个子集构造一个势函数,然后将这些势函数进行线性组合得到整体的势函数。
2. 构造性方法:通过对博弈状态空间的特定结构进行深入分析,找到能够反映状态演化规律的变量,并构造满足一定条件的势函数。
3. 对偶势函数法:将博弈状态空间的一个势函数与另一个满足一定条件的势函数进行对偶组合,构造出新的势函数。
4. 梯度系统方法:利用梯度系统理论中的技巧,构造出满足一定条件的势函数。
这些方法都是为了在博弈论中寻找一个合适的势函数,以便分析博弈的稳定状态、演化路径等问题。
在具体应用时,选择合适的方法需要根据具体的博弈模型和问题进行综合考虑。
混合势函数法
混合势函数法是一种在物理学中广泛使用的数学工具,用于描述复杂系统的能量和热力学性质。
它结合了两种不同的势函数——内能和熵——来描述系统状态的变化。
通过对这两种势函数的组合使用,可以更全面、更准确地描述系统的能量和热力学性质,包括热力学平衡和非平衡态下的动态行为。
混合势函数法在物理学的多个领域中都有广泛的应用,包括热力学、化学、物理化学、材料科学、生物学等。
在实际应用中,混合势函数法可以用于研究复杂材料的相变行为、分子间相互作用等问题,也可以用于设计和优化新型材料的性能,以及探索生物体系的热力学性质。
总之,混合势函数法是一种非常有用的数学工具,为物理学、化学、材料科学等领域的研究提供了重要的帮助和支持。
- 1 -。
求解变力做功的八种方法在物理学中,做功是指力对物体施加作用力并使其产生位移的过程中所做的功。
而当作用力是变化的时候,求解变力做功就变得相对复杂。
本文将介绍八种常用的方法来求解变力做功问题,帮助读者更好地理解这一物理概念。
一、分割法分割法是将变力分割成多个小的力,然后分别计算每个小力在相应的位移上所做的功,再将它们累加起来。
通过将变力离散化,我们可以近似所需求解的变力做功。
二、辅助函数法辅助函数法是将变力关于位移进行积分,得到一个辅助函数,再通过求导的方法求解变力做功。
这个方法需要对变力进行积分和求导,适用于一些特殊的变力情况。
三、力的分解法力的分解法是将变力分解成两个简化的力,一般是平行和垂直于位移的力,然后分别计算每个简化力在相应的位移上所做的功,再将它们相加。
通过将变力进行分解,我们可以将复杂的问题简化为分别求解两个力的功的问题。
四、动能定理法动能定理法利用了动能的变化与外力做功的关系,即外力做功等于物体动能的变化。
通过对物体的动能变化进行分析,我们可以求解变力做功的问题。
五、引入势函数法引入势函数法是将变力与势函数建立联系,通过势函数的导函数来求解变力做功。
这个方法需要找到一个合适的势函数,适用于一些具有简单势函数形式的变力情况。
六、平均值法平均值法是将变力近似为一个平均力,然后计算该平均力在整体位移上所做的功。
虽然这种方法只是对变力做功的近似,但在一些情况下可以提供一个比较准确的结果。
七、图形法图形法是通过绘制力与位移之间的图形来求解变力做功。
通过图形分析,我们可以计算图形下的面积或曲线的积分,进而得到变力做功的值。
八、牛顿第二定律法牛顿第二定律法利用了牛顿第二定律与功的关系,即力乘以位移等于质量乘以加速度乘以位移。
通过将力进行分解,我们可以将变力做功的问题转化为求解加速度和位移的问题。
综上所述,以上八种方法是常用的求解变力做功的方法。
在实际问题中,根据具体情况选择合适的方法求解变力做功问题,可以帮助我们更好地理解力学中的变力概念,并解决具体的物理问题综合上述八种方法,我们可以看出,求解变力做功问题的方法有多种多样,每种方法在不同情况下都有其适用性和限制性。
势函数法
一、公式
n m r
B r A U +-=,又叫做Leonard Jones 势函数,模拟原子间的引力和斥力作用,A 、m 分别是斥力系数和阶数,B 、n 分别是吸引力的系数和阶数;
二、不同的系数和阶数可以导致完全不同的运动状态,如下图:
①、由于速度过快,导致冲过头,然后导致返回; ②、形成类似于拦截的效果;
③、形成类似于视觉追击的效果;
④、由于吸引力过小,导致运动半径极大,从而形成远离效果;
只设置斥力,形成类似于避障的效果;
设置四方墙体的势场函数,可以形成反弹的效果;
可以形成类似蜜蜂成群结队的效果;。