自动擦黑板机
- 格式:doc
- 大小:82.00 KB
- 文档页数:7
基于Arduino的智能黑板擦设计1. 引言1.1 背景介绍数字统计、段落分割等信息。
【背景介绍】智能科技在现代社会中得到了广泛的应用和发展,智能黑板擦作为智能化教育设备的一种,也逐渐受到人们的关注和重视。
传统的教学过程中,教师需要反复用手动黑板擦擦拭黑板,不仅费时费力,而且容易造成粉尘飞扬,对健康不利。
而智能黑板擦则能够通过自动化的方式完成擦拭工作,大大提高教学效率和舒适度。
1.2 研究意义智能黑板擦是一种结合了传统黑板擦和现代智能技术的新型产品,其具有极高的实用性和创新性。
在传统教学中,教师需要频繁地擦拭黑板,这不仅浪费时间和精力,还会对身体造成一定的负担。
而智能黑板擦的出现,可以有效地解决这一问题,为教师提供更为便捷和高效的教学工具。
智能黑板擦不仅可以自动擦拭黑板,还可以根据教师的指令完成特定的擦拭动作,大大提高了教学效率。
智能黑板擦还可以实现黑板内容的保存和分享,方便学生随时翻阅复习。
这些功能的实现,将为教学和学习带来极大的便利和创新。
研究智能黑板擦的设计与制作具有重要的意义。
通过深入研究智能黑板擦的原理和应用,可以不仅提高教学效率,还可以促进教育信息化的发展。
智能黑板擦的研究还有助于推动智能教育技术的发展,为教育行业注入新的活力和动力。
研究智能黑板擦的意义重大,具有广阔的发展前景。
1.3 研究目的研究目的是为了探索基于Arduino的智能黑板擦设计,通过引入智能化技术,提高黑板擦的效率和便利性。
在传统的教室中,老师需要手动操作黑板擦来擦拭黑板上的内容,这样的方式效率低下且易造成灰尘飞扬。
而利用Arduino技术,可以实现自动识别黑板上的内容并自动擦除,减少教师的工作量,提高课堂的效率。
智能黑板擦还可以结合其他智能化技术,如语音识别、人脸识别等,为教室带来更多便利和智能化体验。
通过本研究,我们旨在设计出一款简单实用、高效智能的黑板擦,为教学工作者提供更好的辅助工具,提升教学效果和体验。
本研究也将探索Arduino在智能设备设计中的应用和优势,为智能化教室的发展做出贡献。
机械原理课程设计全自动黑板擦方案一in图文综合文库嘿,大家好!今天给大家带来的是一个相当实用且有趣的项目——全自动黑板擦方案。
作为一位有着10年方案写作经验的大师,我将用意识流的方式,给大家详细讲解这个方案的来龙去脉。
一、项目背景作为学生,我们都有过擦黑板的经历,那种尘土飞扬、胳膊酸痛的感觉至今仍记忆犹新。
而作为老师,频繁地擦黑板也是一个相当费时费力的工作。
于是,我们萌生了设计一款全自动黑板擦的想法,既减轻学生和老师的负担,又提高了课堂效率。
二、项目目标1.实现全自动擦黑板功能,减少人力投入。
2.降低尘土飞扬,改善课堂环境。
3.提高黑板使用寿命,降低学校成本。
三、设计原理1.电机驱动:采用直流电机作为动力源,通过减速器降低转速,增加扭矩,驱动擦板机构运动。
2.传感器检测:利用红外传感器检测黑板擦的位置,确保擦板均匀,避免漏擦。
3.控制系统:采用单片机作为控制核心,实现黑板擦的自动启动、停止和往返运动。
四、方案设计1.结构设计(1)黑板擦主体:采用方形铝合金管材,轻便、耐用。
(2)擦板机构:采用毛刷材质,具有较强的清洁能力。
(3)电机及减速器:固定在黑板擦主体上,驱动擦板机构运动。
(4)传感器:固定在黑板擦两侧,检测黑板擦位置。
(5)电源:选用充电锂电池,方便充电和携带。
2.控制系统设计(1)单片机:选用STC89C52,具有丰富的外设接口,便于扩展。
(2)驱动电路:采用L298N驱动芯片,驱动直流电机。
(3)传感器信号处理:采用电压比较器,将传感器信号转换为数字信号,输入单片机。
(4)显示及按键:设置LCD显示屏,显示黑板擦状态;设置按键,用于手动控制黑板擦。
五、功能实现1.自动启动:当黑板擦放置在黑板下方时,红外传感器检测到黑板,自动启动电机。
2.自动停止:当黑板擦擦拭到黑板边缘时,红外传感器检测不到黑板,自动停止电机。
3.自动往返:当黑板擦擦拭到黑板边缘后,自动反转方向,继续擦拭。
4.手动控制:通过按键,可以手动启动、停止黑板擦,调整擦板速度。

基于STM32单片机智能伺服型黑板擦随着科技的不断进步,智能化设备在我们的生活中已经变得越来越常见。
而在教育领域中,智能化设备也在不断地发挥着作用,提高了教学效率和质量。
今天我们要介绍的就是基于STM32单片机的智能伺服型黑板擦,它能够帮助老师更加轻松便捷地擦拭黑板,提高课堂效率。
下面让我们来详细了解一下这款智能黑板擦的设计和功能。
一、硬件设计1. 单片机选择在本设计中,选择了STM32单片机作为控制核心。
STM32是意法半导体公司推出的32位MCU产品系列,具有高性能、低功耗和丰富的外设资源。
它采用ARM Cortex-M内核,运行速度快,具有较高的性能,能够满足黑板擦控制系统对性能的要求。
2. 伺服电机黑板擦的移动是由伺服电机来控制的,在本设计中选择了一款小巧轻便但功率较大的伺服电机。
这款伺服电机具有稳定的控制性能和精准的位置控制能力,能够满足黑板擦的移动需求。
3. 传感器为了提高智能化程度,本设计中还加入了一些传感器,如光电传感器和超声波传感器。
光电传感器用于检测黑板擦的位置,超声波传感器用于检测黑板的位置,从而实现对黑板擦位置的自动调整。
4. 无线通信模块为了方便控制和监测黑板擦,设计中还加入了无线通信模块,可以通过手机或电脑对黑板擦进行远程控制和监测。
1. 控制算法在软件设计中,需要设计出一个稳定可靠的控制算法,来实现对黑板擦的精准控制。
这个算法需要考虑到伺服电机的特性和黑板擦的移动特点,尽量减小误差,提高精度。
2. 界面设计为了方便用户操作和监测黑板擦,设计了一个用户友好的界面,可以在手机或电脑上实时监测黑板擦的位置和状态,并且可以通过界面来控制黑板擦的移动。
三、功能特点1. 自动擦拭智能伺服型黑板擦可以根据预设的路径和时间自动擦拭整个黑板,老师只需要简单设置一下就可以让黑板擦自己完成擦拭工作,省去了反复擦拭的麻烦。
2. 自动调整位置通过传感器检测黑板和黑板擦的位置,智能伺服型黑板擦可以自动调整擦拭路径,确保每一块区域都能被擦拭到,提高了擦拭效率。
基于Arduino的智能黑板擦设计智能黑板擦是一种结合Arduino技术和智能控制的设备,可用于擦拭黑板上的文字和图案。
它可以实现自动控制,减少人工操作,提高效率,是教学和办公场所的理想选择。
本文将介绍基于Arduino的智能黑板擦的设计方案。
设计步骤:1. 材料准备所需材料包括Arduino控制板、直流电机、电池、传感器、橡胶擦头等。
电机用于驱动橡胶擦头的运动,传感器用于检测黑板上的文字和图案,以便进行自动擦拭。
2. 电路设计根据所需控制功能,设计电路连接图,并将其连接到Arduino控制板上。
电机和传感器需要接入控制板的GPIO口,以实现控制和信号采集。
电池则为整个系统提供电源。
3. 程序编写利用Arduino开发环境编写程序,实现对电机和传感器的控制。
程序应能够实时监测黑板上的情况,当检测到需要擦拭时,启动电机驱动橡胶擦头进行擦拭操作。
4. 调试测试将搭建好的智能黑板擦进行调试测试,验证程序的准确性和稳定性。
通过模拟黑板上的文字和图案,检测系统是否能够准确地进行擦拭操作。
5. 完善优化根据测试结果,对系统进行优化和改进。
例如调整传感器灵敏度,优化擦拭路径规划等,以提高系统的性能和稳定性。
6. 应用推广将搭建好的智能黑板擦应用到教学和办公场所,观察其实际效果和用户反馈。
根据实际需求,进一步改进和改良设备,使其更符合用户的需求。
总结基于Arduino的智能黑板擦设计,可以提高黑板清洁效率,减少人工操作,提高工作效率。
通过合理的电路设计和程序编写,结合优质的材料,可以打造出高性能的智能黑板擦设备。
这种智能黑板擦不仅适用于学校的教学环境,也可以应用于一些工作场所,提高工作效率,减轻人力负担。
希望本文对您有所帮助,谢谢您的阅读。
滚刷式智能机器人黑板擦机理研究摘要本文主要介绍滚刷式智能机器人黑板擦的机理研究。
黑板擦是用来清除教室黑板的一种工具,现在智能化的黑板擦机器人已经被广泛应用于教育领域。
其中,滚刷式智能机器人黑板擦是一种较为普遍的黑板擦机器人。
本文将介绍滚刷式智能机器人黑板擦的构成、工作原理及优缺点等方面。
简介随着科技的不断进步,智能化设备已经不再是一种新奇的东西。
智能化设备在生活中的应用越来越广泛,其中教育领域的应用也是不断增多。
智能化黑板擦机器人就是其中之一,其将黑板擦工作自动化,能够提高教育工作者的工作效率。
滚刷式智能机器人黑板擦是一种较为普遍的黑板擦机器人,其机理较为简单,工作效率较高。
下面,将详细介绍滚刷式智能机器人黑板擦的构成、工作原理及优缺点。
构成滚刷式智能机器人黑板擦主要由机器人主体、滚刷、马达及电池等部件组成。
其中,机器人主体是黑板擦机器人的核心部件,其通过内置程序控制滚刷运动,并完成黑板擦的工作。
滚刷是滚刷式智能机器人黑板擦的重要组成部分,其通过旋转完成擦拭黑板的动作。
滚刷的材质一般采用毛刷或海绵,其材质的选择与黑板表面的不同会影响到擦拭效果。
马达是滚刷式智能机器人黑板擦的动力来源,其可以控制滚刷的转速与方向。
电池则是黑板擦机器人的电源,其负责为机器人供电。
工作原理滚刷式智能机器人黑板擦的工作原理较为简单,其主要分为三个步骤:运动、擦拭、返回。
在运动阶段,滚刷式智能机器人黑板擦会通过马达控制滚刷的移动方向和速度,将机器人主体移动至黑板表面。
在擦拭阶段,滚刷式智能机器人黑板擦会通过马达控制滚刷的旋转方向和速度,滚刷会与黑板表面接触,完成擦拭黑板表面的工作。
在返回阶段,滚刷式智能机器人黑板擦会通过马达控制滚刷的移动方向和速度,将机器人主体返回至起始点。
需要注意的是,在操作过程中滚刷式智能机器人黑板擦需要遵守一定安全规范,如避免将手部或其他物品靠近滚刷等。
优缺点滚刷式智能机器人黑板擦具有以下优缺点。
优点1.自动化程度高滚刷式智能机器人黑板擦能够自动完成黑板擦工作,无需人工干预,从而提高了教育工作者的工作效率。
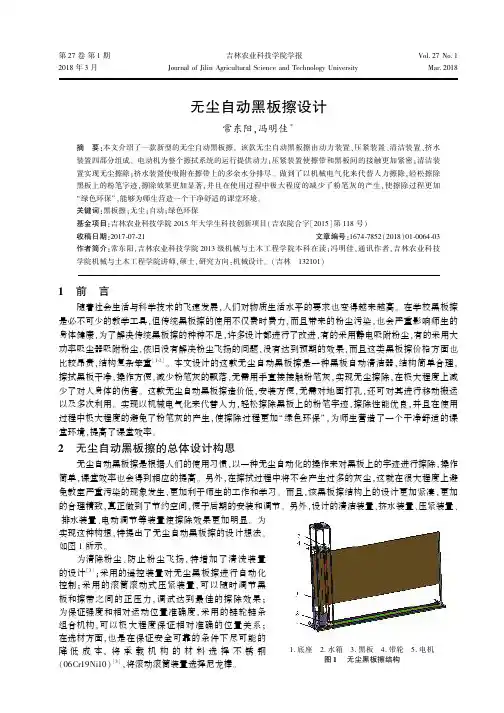
摘要教室黑板凌乱给教师和学生带来了诸多不便,灰尘漫天给学生健康和教室干净的形象带来影响。
个人的身体健康在一定程度上取决于你所呼吸的空气的洁净程度。
粉笔教具是目前教学的必备工具,用它来传授知识,是最原始和最传统的主要教学方法之一,粉笔其应用到现在已有几千年的历史,对人类的教育事业做出了不可磨灭的贡献,随着历史的进步和社会的发展,人类对粉笔教具的认识不断提高,即粉笔给人类教育事业带来进步和做出巨大贡献的同时,也给从事教育事业的教师及学生带来巨大的危害。
根据全国部分城市调研资料显示,随着社会进步和社会节奏的加快,教师职业病率呈逐年上升的趋势,职业病呈现多样化方向发展,其中粉尘引起的尘肺以及各种急慢性呼吸道疾病是中国目前职业病中最主要,危害最严重和最广泛的一种。
学生近视患病率亦逐年上升,到了异常严重的程度。
本文的设计思路电机通过采用自动送料螺杆的原则驱动,同时对设计方案进行了包括其机构组成和某些重要结构在内的具体设计。
该机构介绍派生关系橡皮擦运动形式和结构参数的工作原理。
该分析机构对研究黑板擦的运动规律具有重要意义。
该黑板擦由外壳、减速器、齿轮、轴、轴承、毛毡等组成,黑板擦边缘采用密封装置,外接吸尘管。
本文所设计的黑板擦具有收尘效率高,结构简单,清灰方便,成本低,可靠性高等特点。
关键词:黑板擦、粉尘、电动机ABSTRACTMessy classroom blackboard for teachers and students a lot of inconvenience , dust filled the health impact to students and classrooms clean image. Personal health depends to some extent on the cleanliness of the air you breathe . Chalk is an essential tool currently teaching aids , and use it to impart knowledge , is one of the most original and most traditional main teaching method applied to chalk it now has thousands of years of history, mankind has made education indelible contribution , along with the historical development and social progress , human understanding of the continuous improvement of teaching aids chalk , chalk that brings education to human progress and at the same time make a significant contribution , but also to engage in education of teachers and students bring great harm.According to the National Survey data show that part of the city , along with social progress and social rhythm accelerated rate of occupational teachers showed an increasing trend in the direction of occupational diversified development, including pneumoconiosis and a variety of acute and chronic respiratory diseases caused by dust is China's occupational most important , the most serious and widespread harm one . Students prevalence of myopia has increased year by year , to the unusually severe degree.In this paper, the design ideas of the motor by using the principle of automatic feeding screw driver , while the design of programs , including the composition and structure of their bodies , including some important specific design . The agency describes the relationship between the eraser works derived form of exercise and structural parameters .This analysis has important implications for research institutions eraser law of motion . The eraser from the shell, reducers , gears, shafts , bearings, blankets , etc., using the eraser edge seals , external vacuum tubes . This article is designed eraser has a high collection efficiency , simple structure, easy cleaning , low cost and high reliability.Keywords: Eraser, dust, motor目录摘要 (I)ABSTRACT (II)第1章绪论 (3)1.1 课题研究的背景 (3)1.2 国内外研究现状 (3)1.3 黑板发展的五个重要时代 (5)1.4 课题研究的目的及意义 (6)1.5 本设计的内容 (7)第2章自动黑板擦方案的确定及工作原理 (8)2.1 设计方案的确定 (8)2.2 工作原理 (8)第3章自动黑板擦的设计及计算 (10)3.1 电动机选择 (10)3.2 减速器的设计 (10)3.2.1 主要部件的选择 (10)3.2.2 分配传动比 (10)3.2.3 参数的设定 (10)3.2.4 齿轮的设计 (10)3.2.5 轴的结构设计 (11)3.3 齿轮的设计 (11)3.3.1 确定类型、材料及参数 (11)3.3.2 按齿面接触强度设计 (12)3.3.3 按齿根弯曲强度设计 (13)3.3.4 几何尺寸计算 (15)3.4 轴的设计 (15)3.4.1 材料的选取 (15)3.4.2 轴的校核 (16)3.4.3 轴承寿命校核 (17)3.4.4 键的设计与校核 (19)第4章结论 (22)致谢 (23)参考文献 (24)第1章绪论1.1 课题研究的背景“一根粉笔,三尺讲台”,这是对教师的由衷赞美。
全自动磁吸附黑板擦机器人作者:暂无来源:《发明与创新·中学生》 2017年第9期擦黑板是日常教学中一项常规工作,它不仅耗时费力,而且产生的粉尘不利于师生的身体健康。
因此,我设计了一个全自动黑板擦机器人。
一、结构与工作原理全自动磁吸附黑板擦机器人主要包含行走、吸附、驱动控制、擦拭四大系统。
该机器人采用间隙永磁的吸附方式,通过交替N-S极永磁体布置实现磁路耦合,为机器人提供爬壁吸附力。
电机驱动机器人轮式移动机构,使机器人在黑板上运动。
机器人移动时,由安装于底盘下的擦拭系统完成擦拭黑板的任务。
二、设计过程1.行走系统行走系统设计主要是确定行走轮的布局方案,本机器人采用的布局方案如图1所示。
该方案采用四个全向轮布置方式,可实现黑板擦机器人在黑板壁面上纵向和横向无障碍地移动。
由于没有转弯半径,故整体采用方形设计,在擦拭过程中可最大程度地覆盖黑板表面。
2.吸附系统黑板擦机器人要完成擦黑板的任务,最基本的功能是实现在壁面上可靠的吸附,因此吸附系统非常关键。
我提出了一种面状间隙式吸附方案,如图2所示。
它有如下特点。
(1)永磁体和轭铁组成的面状吸附系统与壁面之间预留一定的间隙,且可根据需要调节吸附力。
(2)将吸附功能与移动功能分离,使机器人吸附能力强、移动灵活。
3.驱动控制系统驱动系统由行走电机、控制芯片、避障模块、降压模块组成。
整个控制系统的流程为:机器人从黑板的左下方出发,先向上行走,当碰到黑板上方的边缘时,安装在黑板擦前方的红外避障传感器根据反射回来的红外线判断机器人所处的位置,进而让其停止运动,1秒之后会向右行驶一段与机器人宽度相同的位移。
然后再向下运动,当碰到下方的边沿时,安装在黑板擦下方的红外避障传感器根据反射回来的红外线判断机器人所处的位置,再次让其停止运动,1秒之后再向右行驶一段与机器人宽度相等的位移,如此循环进行工作。
当其同时收到两个(右边和上方红外避障模块或右边和下方红外避障模块)红外避障模块反馈信号时,机器人自动停止擦拭,此时运动结束。
基于Arduino的智能黑板擦设计一、设备材料准备智能黑板擦的设计需要使用以下材料:1. Arduino控制板;2. 3D打印机打印出来的擦板;3. 蓝牙模块;4. 双向直流电机;5. 麦克风传感器;6. 扭矩电机。
二、智能黑板擦的原理智能黑板擦可以通过控制中心的程序方便地清除黑板上的教学内容,增加教师上课的效率和活跃度。
智能黑板擦的原理是根据激光传感器、扭矩电机和麦克风传感器等传感器和驱动控制系统,收集、处理、传输和执行黑板清除任务。
三、设计详解1. 智能黑板擦的机械结构智能黑板擦的机械结构由3D打印出的擦板和电动马达组成。
在擦板上设置不同的形状和纹路,可以让扭矩电机轻松地清除黑板上的文本、数字符号等信息。
同时,扭矩电机的运行速度也可以通过控制降低,以确保在清除过程中不会把黑板上的文字磨损过多。
2. 智能黑板擦的电子控制部分智能黑板擦的电子控制部分包括Arduino控制板、蓝牙模块、麦克风传感器等部分,可以实现扭矩电机的精准控制、任务提醒以及录制课程等功能。
3. 智能黑板擦的软件部分智能黑板擦的软件部分可以通过编写代码来实现控制黑板擦的各种操作。
在程序运行的过程中,需要实时检测麦克风传感器所采集到的声音信号,并根据声音信号来控制扭矩电机清除黑板上的信息。
此外,还可以设置任务提醒和课程录制等功能,以提高教学效率。
四、实现方案智能黑板擦的实现方案是将所有模块都连接至Arduino主控板上,并使用蓝牙模块进行无线数据传输,实现对黑板擦的控制。
在程序的运行过程中,Arduino控制板可以通过监测麦克风传感器所采集到的声音信号,来控制扭矩电机,实现清除黑板信息的功能;同时,在扭矩电机运行过程中,可以设置不同的速度和清除强度,以适应不同情况下清除黑板上的文本等信息。
五、项目优势与应用前景智能黑板擦的应用将大大提高教学效率,降低教学难度。
由于其简单易用、高效安全的特点,智能黑板擦已经得到广泛应用,其将成为未来教学场景中的必备设备。
罩去软毯与粉尘,使用者只要按动按钮即可使它动与停止。
每个软毯既可紧贴黑板,亦可不紧贴黑板。
在一排横梁外有一条长的盒槽。
所以,当我们需要擦黑板时,就无需人工的用黑板擦,而是可以控制开关,使它移动到我们需要的地方开始自动的擦去粉笔字迹,这样就给使用者带来不少便捷之处。
全自动黑板擦是一种最新专利的新型黑板擦,但价格较贵,体积较大,耗电大。
2.3 电动黑板擦它的外部设有外壳后部设有出风口外壳内后部设有电动机,其转子上设有涡轮式风扇,转子前端设有毛刷,毛刷后部设有粉尘隔离罩下方设有过滤器。
接通电源,电动机转动,带动毛刷和风扇一起转动,将毛刷接触黑板将字迹擦掉,所产生的粉尘在隔离罩和风扇所产生向后吹的风的共同作用下,向后移动,在过滤器内被过滤掉,在出风口排出清静空气。
据初步市场统计潜在销量1000万台左右,加上家庭和办公,市场潜力巨大。
但是现在国内还没有普及应用。
2.4 集尘式黑板擦擦黑板的同时将粉笔灰收集起来,擦,吸,滤,排按顺序完成,适用于不同的粗糙程度的黑板和不同的毛刷擦板,镀膜粉笔。
这种粉笔擦不脱粉,耐潮湿。
该黑板擦有专利权,还未大面积上市,不普及。
3 可行性分析3.1 具备的条件(1)近几年来,国内外未解决粉笔灰的问题而做了很多的设计,在各类自动无尘黑板擦方面取得了和大的进步,基本已经解决了这困扰师生健康的问题。
(2)国内这个行业算是一个新兴的行业,很有发展前景,并且各类自动黑板擦在国内都有使用,为本课题提供了实际的参考。
(3)在校期间,本人对于自动黑板擦的机构与设计也有一定的学习和理解,并对一些数学建模软件,绘图软件较为熟悉,为完成课题理论研究打下基础。
3.2 存在的问题(1)成本虽较无尘黑板低,但一般成本也较高,在国内还没有大量的普及。
(2)外形结构较为复杂,体积也比较大,虽不需要人工擦拭黑板,但却大量的耗费电能。
我么需要对以上存在的问题加以解决,对现有的各类自动黑板擦进行优化。
4 研究的主要内容(1)提出自动黑板擦的设计方案,并设计和绘制自动黑板擦的机构运动简图。
技术学院毕业设计题目:自动吸尘清洁黑板擦设计系部现代制造工程系专业名称模具设计与制造自动吸尘清洁黑板擦设计摘要该设计主要介绍自动吸尘清洁黑板擦的发展趋势与总体设计;研究背景和方案的确定;整体运动部分的分析;伸缩架的设计;曲柄滑块的设计;凸轮尺寸大小的设计;活动黑板擦的设计;电路部分的设计。
根据设计计算相关数据,采用AutoCAD绘制零件图和装配图,对主要零件采用UG4.0进行三维造型,并完成毕业设计说明书的编写。
关键词:自动吸尘;清洁;黑板擦;设计目录1绪论 (1)1.1研究背景 (1)1.2研究的目的意义 (1)1.2.1 研究的目的 (1)1.2.2 研究的意义 (1)1.3国内外研究现状 (2)1.3.1 电动黑板擦 (2)1.3.2 吸尘黑板擦 (3)1.3.3 集尘式黑板刷 (3)1.3.4 自动吸尘黑板刷 (3)1.3.5 卫生黑板 (4)1.4 本设计的内容 (4)2方案的确定 (5)2.1可行的几种方案 (5)2.1.1 无尘黑板擦 (5)2.1.2 防尘黑板 (6)2.1.3 自清洁黑板 (7)2.2自动清洁黑板擦方案的选择 (7)2.2.1 所属技术领域 (7)2.2.2 背景技术 (7)2.2.3 发明内容 (7)2.3小黑板擦的方案确定 (8)2.3.1 简图 (8)2.3.2 小黑板擦的结构及工作情况简介 (8)3自动吸尘清洁黑板擦的设计计算 (10)3.1电机的选择 (10)3.2 机构的设计 (10)3.2.1 材料的选择 (10)3.2.2 菱形架几何尺寸及自由度设计计算 (10)3.2.3曲柄滑块几何尺寸及自由度设计计算 (11)3.2.4 曲柄滑块的运动分析与力学计算 (11)3.2.5 凸轮机构的设计 (15)3.2.6 磨削圆周进给量计算 (20)3.3 滚筒的设计 (21)3.4吸尘装置的选择 (23)3.5电路控制的设计 (23)3.5.1 硬件系统的设计 (23)3.5.2 最小系统设计 (24)3.5.3 无线收发模块 (24)3.6 作品三维图及实物图 (26)结论 (27)致谢 (28)参考文献 (29)附录 (30)附录A (30)附录B (33)1绪论1.1研究背景黑板历来是各级各类学校必备的教学工具,传统黑板,人工擦拭效率低,粉尘污染严重。
海军工程大学2014年度机械创新设计作品方案报告作品名称:智能黑板擦参赛选手:11-422 李明昊11-422 赵恒11-422 刘晨博11-422 贾战鹏指导教师:海军工程大学训练部二〇一四年三月十日前言“一根粉笔,三尺讲台”,这是对教师的由衷赞美。
殊不知,赞美背后,隐忧多多。
板书带来的“粉笔综合症”已成为广大师生的头号健康隐患。
教师常年使用粉笔,不自主地“吸”入大量粉尘,容易患上呼吸系统疾病。
而学生与粉笔尘接触时间长,易受教室二次扬尘的危害,他们受到的危害甚至比教师更为严重。
一名学生从小学到读完大学至少需要16年时间,这正是生长发育的黄金时期,却要不断受到粉笔灰尘的侵袭;一名教师从站到讲台上到退休大多在40年左右,生命的大半时间都要“吃粉笔灰”。
因为每天上课要写板书、擦黑板,粉笔灰经常把老师弄得蓬头垢面。
而且老师总是一边写板书,一边讲解,甚至有时一边擦黑板,粉笔灰也就自然而然地被吸进去。
要是遇到上老师感冒、咳嗽,粉笔灰更是雪上加霜,严重的还会引发哮喘。
据估算,一般而言,一名中学语文老师在一节45分钟的课上,需要写一黑板的板书,而一黑板的板书需要用掉半支粉笔;而一名中学英语老师或数学老师在一节45分钟的课上,往往需要写5黑板的板书,大约就要用掉两支半的粉笔。
而毕业班的老师一天最多需要6节课,就相当于要“吸”掉12支粉笔。
一、设计目的众所周知,黑板是我们日常学习中必不可少的一样教具,无论是从小学还是到大学,都会使用到黑板,而一般我们平时使用的人工黑板擦不但费时、费力,还有粉尘污染空气的缺点。
因此,我们就有了“全自动黑板擦”的这个设想。
从而达到使广大师生减少劳动强度及不受粉尘危害、身心健康得到保护的目的。
另外,通过我们调查,目前市场中虽已有自动黑板擦,但大多数都是针对一块黑板,而且使用起来不方便,没有真正达到自动和无尘的目的,因此我们设计了此“全自动无尘黑板擦”。
全自动无尘黑板擦包括固定黑板擦的横梁,驱动电机,联轴器,电机支架,齿轮,齿条,齿条架,导轨,燕尾,燕尾槽,防尘罩,电机罩,螺杆,滑块,连杆,黑板擦架,螺钉,螺栓,螺母等一系列零件。
专利名称:黑板擦
专利类型:发明专利
发明人:李信
申请号:CN201210375555.5申请日:20120929
公开号:CN103707699A
公开日:
20140409
专利内容由知识产权出版社提供
摘要:本发明公开了一种黑板擦,包括设置在黑板上下两端的滑轨,滑轨内设有滚轮,刷条与设置在滑轨上的滚轮连接,刷条的底面设有刷毛,所述刷条与一电动机电连接。
本发明设置了滑轨、滚轮、刷条,以及驱动刷条工作的电动机,实现了自动擦拭黑板的自动化,具有结构简单、省时省力的特点。
申请人:李信
地址:538000 广西壮族自治区防城港市港口区康晨小区
国籍:CN
代理机构:桂林市持衡专利商标事务所有限公司
代理人:苏家达
更多信息请下载全文后查看。
基于STM32单片机智能伺服型黑板擦1. 引言1.1 背景介绍智能伺服型黑板擦是一种基于STM32单片机的智能设备,用于擦拭黑板上的书写内容。
随着现代教育技术的发展,传统的手工使用擦子擦拭黑板的方式已经逐渐不能满足教师和学生的需求。
智能伺服型黑板擦的出现,有效解决了这一问题。
智能伺服型黑板擦利用STM32单片机的高性能和低功耗特点,结合伺服电机等硬件设备以及相应的控制算法,能够实现对黑板书写内容的自动识别和擦拭。
通过在黑板表面安装传感器,可以实时监测黑板上的书写内容,并根据预设的擦除路径和规则进行操作,实现快速高效的擦拭过程。
智能伺服型黑板擦的引入不仅提高了教学效率,减轻了教师工作负担,还能够增强学生的学习体验。
未来,随着人工智能和物联网技术的发展,智能伺服型黑板擦有望进一步智能化和智能化,为教育领域带来更多创新和便利。
1.2 研究意义智能伺服型黑板擦是一种基于STM32单片机的智能设备,在教学和办公场景中具有广泛的应用前景和重要的研究价值。
其研究意义主要体现在以下几个方面:1. 提高教学效率:传统的黑板擦需要手动擦拭,在使用过程中容易造成粉尘飞扬和时间浪费。
而智能伺服型黑板擦通过自动化擦拭功能,能够快速、清洁地擦拭黑板,提高教学效率。
2. 提升用户体验:智能伺服型黑板擦具有智能化、自动化的特点,操作简单、便捷,用户体验更加顺畅和舒适。
3. 促进科技教育:研究和开发智能伺服型黑板擦能够促进科技教育的发展,激发学生对物联网、嵌入式系统等领域的兴趣,培养学生的创新思维和动手能力。
4. 推动智能办公:智能伺服型黑板擦不仅可以在教育领域广泛应用,也可以在办公场景中实现自动擦拭黑板的功能,提升办公效率,推动智能办公的发展。
通过研究智能伺服型黑板擦,不仅可以提高教学效率和用户体验,还能促进科技教育的发展,推动智能办公的普及,具有重要的实用和社会意义。
2. 正文2.1 概述智能伺服型黑板擦是一种基于STM32单片机的智能设备,其主要功能是在教室中自动擦拭黑板,帮助教师节省时间和精力。