计算方法龙格现象和用最小二乘法拟合曲线
- 格式:doc
- 大小:327.50 KB
- 文档页数:4
最小二乘法拟合原理最小二乘法是一种常用的数学方法,用于寻找一组数据的最佳拟合曲线或者最佳拟合函数。
它的原理是通过最小化实际观测数据与拟合曲线之间的残差平方和,来确定最佳拟合曲线的参数。
这个方法在实际应用以及科学研究中非常常见,下面将详细介绍最小二乘法的拟合原理。
在介绍最小二乘法之前,我们首先需要了解线性回归模型。
线性回归是一种常见的数据拟合手段,它基于以下假设:给定自变量X和因变量Y,存在一个线性关系Y=aX+b。
其中,a称为斜率,b称为截距。
当我们拥有一组数据(X1,Y1),(X2,Y2),(X3,Y3),...,(Xn,Yn)时,最小二乘法通过找到最佳的a和b,使得方程Y=aX+b最好地拟合这组数据。
它通过最小化每个观测点的残差来确定最佳拟合曲线。
残差是指实际观测值与拟合值之间的差异。
对于每一个观测点(Xi,Yi),其拟合值为Yi'=aXi+b,残差为Ri=Yi-Yi',即实际观测值与拟合值的差。
S=∑(Yi-Yi')²=∑(Yi-aXi-b)²为了找到最佳的a和b,我们需要求解方程S对a和b的偏导数,并令其等于0。
求解a和b的偏导数得到以下两个方程:∂S/∂a=0∂S/∂b=0对第一个方程求解可以得到:∂S/∂a=-2∑(Yi-aXi-b)Xi=0进一步整理可以得到:∑YiXi-a∑(Xi)²-b∑(Xi)=0对第二个方程求解可以得到:∂S/∂b=-2∑(Yi-aXi-b)=0进一步整理可以得到:∑Yi - a∑(Xi) - nb = 0其中,n为观测点的数目。
解这个方程组,我们可以得到a和b的值,从而确定最佳拟合曲线的方程Y=aX+b。
最小二乘法还可以用于非线性的数据拟合。
对于非线性拟合,我们可以假设一个非线性的函数模型,例如Y=f(X,θ),其中θ是待拟合的参数。
然后,通过最小化残差平方和来确定最佳的θ值。
方法类似于线性拟合,其中拟合值变为Yi'=f(Xi,θ),残差为Ri=Yi-Yi'。
实验三 函数逼近与曲线拟合一、问题的提出:函数逼近是指“对函数类A 中给定的函数)(x f ,记作A x f ∈)(,要求在另一类简的便于计算的函数类B 中求函数A x p ∈)(,使 )(x p 与)(x f 的误差在某中度量意义下最小”。
函数类A 通常是区间],[b a 上的连续函数,记作],[b a C ,称为连续函数空间,而函数类B 通常为n 次多项式,有理函数或分段低次多项式等,函数逼近是数值分析的基础。
主要内容有:(1)最佳一致逼近多项式(2)最佳平方逼近多项式(3)曲线拟合的最小二乘法二、实验要求:1、构造正交多项式;2、构造最佳一致逼近;3、构造最佳平方逼近多项式;4、构造最小二乘法进行曲线拟合;5、求出近似解析表达式,打印出逼近曲线与拟合曲线,且打印出其在数据点上的偏差;6、探讨新的方法比较结果。
三、实验目的和意义:1、学习并掌握正交多项式的MATLAB 编程;2、学习并掌握最佳一致逼近的MATLAB 实验及精度比较;3、学习并掌握最佳平方逼近多项式的MATLAB 实验及精度比较;4、掌握曲线拟合的最小二乘法;5、最小二乘法也可用于求解超定线形代数方程组;6、 探索拟合函数的选择与拟合精度之间的关系;四、 算法步骤:1、正交多项式序列的生成{n ϕ(x )}∞0:设n ϕ(x )是],[b a 上首项系数a ≠n 0的n 次多项式,)(x ρ为],[b a 上权函数,如果多项式序列{n ϕ(x )}∞0满足关系式⎩⎨⎧=>≠==⎰.,0,,0)()()()(),(k j A k j x d x x x kk j bak j ϕϕρϕϕ则称多项式序列{n ϕ(x )}∞0为在],[b a 上带权)(x ρ正交,称n ϕ(x )为],[b a 上带权)(x ρ 的n 次正交多项式。
1)输入函数)(x ρ和数据b a ,;2)分别求))(),(()),(,(x x x x j j j nϕϕϕ的内积; 3)按公式①)())(),(())(,()(,1)(10x x x x x x x x j n j j jj n nn ϕϕϕϕϕϕ∑-=-==计算)(x n ϕ,生成正交多项式;流程图:开始否是结束2、 最佳一致逼近多项式],[)(b a C x f ∈,若存在n n H x P ∈)(*使得n n E P f =∆),(*,则称)(*x P n 是)(x f 在],[b a 上的最佳一致逼近多项式或最小偏差逼近多项式,简称最佳逼近多项式。
令狐文艳第一题:曲线拟合最小二乘法和切比雪夫的相同和不同,以及适用的场合令狐文艳背景及意义:在很多日常生活以及科研活动中,我们需要对一些离散的点集进行拟合,使得拟合的曲线尽量多的穿过所给出的离散点,并且误差小。
从而通过拟合的函数,找出离散点的规律,以此进行进一步的研究。
下面,就最小二乘法和切比雪夫两种拟合方法进行研究和分析。
1、最小二乘法它的标准是,所求得的拟合函数*()y S x =与给出的实际离散点{(,),0,1,,}i i x y i m =之间的误差平方和最小。
公式为:其中ϕ是规定区间上的线性无关函数族,01{,,,}m span ϕϕϕϕ=。
为了使问题提法更具一般性,在各自的离散点的区间中添加权函数()0x ω≥以表示各个离散点数据的比重不同。
要想求出函数*()S x ,就要求出其各阶系数,转而变成求多元函数极小点***01,,,n a a a其中:()j x ϕ取21,,,,n x x x的问题。
为了求取极值,其必要条件为 简化上式可得到矩阵形式其中01(,,,)T n a a a a =,01(,,,)T n d d d d =,要想使所求极值有唯一解,就要求G 非奇异。
又因()j x ϕ的组所组成向量为非奇异,则G 为非奇异,故而存在唯一的解*,0,1,.k k a a k n ==使得*()S x 为所求最优解。
例题:在相同离散点下用最小二乘法完成曲线拟合程序及结果如下clear all; clc; x0=1:10;y0=[1.1 3.5 9.7 2.6 9.4 6.5 5.6 2.1 6.5 5.9];plot(x0,y0,'o');hold on;x=1:0.1:10;hold on;q=polyfit(x0,y0,3);for i=1:length(x);y1(i)=q(4)+q(3)*x(i)+q(2)*x(i)*x(i)+q(1)*x(i)*x(i)*x(i) plot(x(i),y1(i),'*');hold on;end阶次为一的时候拟合曲线阶次为二的时候拟合曲线阶次为三时拟合曲线分析:最小二乘法的拟合需要提前确定离散点分布情况的阶次,即使是相同的离散点所拟合的多项式阶次不同所得曲线会有很大差异,并且当离散点的规律超过三次多项式的时候所拟合曲线的误差就会很大并出现病态问题。
工程数值分析实验报告指导老师班级 学号 姓名实验一:最小二乘法拟合曲线实验一、实验名称:最小二乘法拟合曲线实验实验时间: 2015-5-14 实验地点: 主楼机房 实验器材: 计算机matlab二、实验目的:学会用最小二乘法求拟合数据的多项式,并应用算法于实际问题。
三、实验要求:(1)根据最小二乘法和加权最小二乘法的基本理论,编写程序构造拟合曲线的法方程,要求可以方便的调整拟合多项式的次数;(2)采用列主元法解(1)中构造的法方程,给出所拟合的多项式表达式; (3)编写程序计算所拟合多项式的均方误差,并作出离散函数 和拟合函数的图形; (4) 用MATLAB 的内部函数polyfit 求解上面最小二乘法曲线拟合多项式的系数及平方误差,并用MATLAB 的内部函数plot 作出其图形,并与(1)的结果进行比较。
四、算法描述(实验原理与基础理论)基本原理:从整体上考虑近似函数 同所给数据点),(i i y x (i=0,1,…,m)误差i i i y x p r -=)( (i=0,1,…,m) i i i y x p r -=)( (i=0,1,…,m)绝对值的最大值imi r ≤≤0max ,即误差 向量Tm r r r r ),,(10 = 的∞—范数;二是误差绝对值的和∑=mi ir,即误差向量r 的1—范数;三是误差平方和∑=mi ir2的算术平方根,即误差向量r 的2—范数;前两种方法简单、自然,但不便于微分运算 ,后一种方法相当于考虑 2—范数的平方,因此在曲线拟合中常采用误差平方和∑=mi ir2来 度量误差 i r (i=0,1,…,m)的五、实验内容:共有两组给定数据,把给定的数据拟合成多项式。
第一组给定数据点如表1所示如下:表1 数据表表2 数据表六、程序流程图七、实验结果ans =27-May-2015ans =7.3611e+05ans =1.0e+03 *2.0150 0.0050 0.0270 0.0140 0.0010 0.0213 >>八、实验结果分析实验程序 quxiannihe.m clear alldate,now,clockx0=[0.0 0.5 0.6 0.7 0.8 0.9 1.0]; y0=[1 1.75 1.96 2.19 2.44 2.71 3.00]; w=ones(size(x0)); x=0:0.01:1; %进行五次曲线拟合 N=5;for i=1:Na1=LSF(x0,y0,w,i) ; y=polyval(a1,x); figure(i)plot(x0,y0,'ok',x,y,'r') title('最小二乘法'); legend('y0','y'); xlabel('x'); ylabel('y'); end实验二:4阶经典龙格库塔法解常微分方程一、实验名称: 4阶经典龙格库塔法解常微分方程实验时间: 2015-5-14 实验地点: 主楼机房 实验器材: 计算机matlab二、实验目的:学习掌握4阶经典R-K 方法,体会参数和步长对问题的影响。
最小二乘拟合在物理实验中经常要观测两个有函数关系的物理量。
根据两个量的许多组观测数据来确定它们的函数曲线,这就是实验数据处理中的曲线拟合问题。
这类问题通常有两种情况:一种是两个观测量x 与y 之间的函数形式已知,但一些参数未知,需要确定未知参数的最佳估计值;另一种是x 与y 之间的函数形式还不知道,需要找出它们之间的经验公式。
后一种情况常假设x 与y 之间的关系是一个待定的多项式,多项式系数就是待定的未知参数,从而可采用类似于前一种情况的处理方法。
一、最小二乘法原理在两个观测量中,往往总有一个量精度比另一个高得多,为简单起见把精度较高的观测量看作没有误差,并把这个观测量选作x ,而把所有的误差只认为是y 的误差。
设x 和y 的函数关系由理论公式y =f (x ;c 1,c 2,……c m ) (0-0-1)给出,其中c 1,c 2,……c m 是m 个要通过实验确定的参数。
对于每组观测数据(x i ,y i )i =1,2,……,N 。
都对应于xy 平面上一个点。
若不存在测量误差,则这些数据点都准确落在理论曲线上。
只要选取m 组测量值代入式(0-0-1),便得到方程组y i =f (x ;c 1,c 2,……c m ) (0-0-2) 式中i =1,2,……,m.求m 个方程的联立解即得m 个参数的数值。
显然N<m 时,参数不能确定。
在N>m 的情况下,式(0-0-2)成为矛盾方程组,不能直接用解方程的方法求得m 个参数值,只能用曲线拟合的方法来处理。
设测量中不存在着系统误差,或者说已经修正,则y 的观测值y i 围绕着期望值 <f (x ;c 1,c 2,……c m )> 摆动,其分布为正态分布,则y i 的概率密度为()()[]⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧--=22212,......,,;exp 21i mi i i i c c c x f y y p σσπ,式中i σ是分布的标准误差。
计算方法实验报告湖北师范学院计算机科学与技术学院一、实验题目最小二乘法和Romberg求积分二、实验内容1、最小二乘法拟合本实验是对于已知的m+1对不带权系数{}mi iw=的离散数据{},mi i ix y=,计00,min()max()i m i ma bi ix y≤≤≤≤==。
在连续的函数空间[]()(),0C a b f a f b⨯<中选定n+1个线性无关的基函数(){}nk kxσ=来构造拟合函数()()nk k kkx a xσσ==∑,求得当系数是最优化模型()()()201min I,,,,mn k i iia a a x y xσσ=⋅⋅⋅=-⎡⎤⎣⎦∑时的解***01,,,na a a⋅⋅⋅。
2、romberg求积分法Romberg算法是利用复合梯形公式,在对积分区间的步长逐次折半的过程中,求得积分I=∫a b f(x)dx的近似值序列{T2k}。
三、法思想描述1、最小二乘法拟合(1)、根据最小二乘法的拟合原理将问题简化为求由待拟合离散数据的正则方程组的求解问题;(2)、输入一散数据{},mi i ix y=,存放于数组[],[]X m Y m中,并给定拟合次数n根据待拟合的次数确定对应的系数矩阵为范德蒙行列式的线性方程组;(3)、由[][][][]TA m n A m n⨯得到正则方程组的系数矩阵[][]F n n,如下式,同时由[][][]TA m n Y m⨯得到值向量[]B n;(4)、用最列主元素法解出正则方程组的根,就得到“二”中描述的系数的最优解。
2、romberg求积分法Romberg算法是区间主次二分的过程中,对梯形值进行加权平均以获得准确程度较高a0a1a2…a n1x0x0 2…x0n1 x1x i n…x i n……………………1 x m x m2…x m n=Y1Y2LLLY m的积分值的一种方法。
对于定积分I= 的复化梯形公式,其余项将积分区间[a,b],逐次折半,假设,以保证复化梯形公式余项系数是非零的,则构成相应的外推法称为Romberg算法:下标m外推得到的第m个算法。

北京工业大学毕业设计(论文)人体后背形态分析系统姓名:***学院:电控学院专业:电子信息工程指导教师:***提交日期:2014年6月北京工业大学毕业设计(论文)任务书题目人体后背形态分析系统专业电子信息工程学号10021215 姓名李子豪主要内容、基本要求、主要参考资料等:主要内容:手法矫正脊柱形态病变具有无创性、恢复快等优势。
当前,手法矫正前,需要首先拍摄患者的CT或者核磁照片,根据脊柱形态变化,进行相应的手法矫治。
特种人员应尽量避免射线照射。
因此,本课题设计了基于立体视觉测量的后背形态评价系统,用于提供患者后背形态特征,供施校者参考。
课题主要内容为:获得后背三维点云数据后,绘制脊沟空间曲线、计算脊柱侧弯角、后背高度比、后背截面积比等一系列指标。
时间安排:第1周填写“开题报告”第2-3周制定研究方案,文献调研,撰写调研报告,确定课题研究内容的具体落实第4-10周系统构建第11-13周撰写论文第14-15周上交毕设论文,指导教师审阅论文。
给出评审成绩。
第16周答辩参考文献:[1]郭伟,刘益善,冯宇,王飞. 脊柱侧弯患者云纹图法诊断的研究[J]. 中国矫形外科杂志,2007,No.19121:1665-1666.[2]郭伟,冯宇,王飞,范宇. 腰椎间盘突出MRI表现与背部云纹图关系的研究[A]. 中国中西医结合学会.第三届世界中西医结合大会论文摘要集[C].中国中西医结合学会:,2007:1.[3]李建平,武志峰,常洪信. 密栅云纹图计算机自动处理系统的研究[J]. 煤矿机械,1999,09:12-14.[4]胡鸿璋,蔡德水,蒋化龙. 云纹图诊断仪的研制[J]. 医疗器械,1987,06:316-321.[5]沈群. 云纹图普查青少年颈源性脊柱侧弯[J]. 上海铁道医学院学报,1995,03:195.完成期限:指导教师签章:专业负责人签章:年月日摘要脊柱是人体物理系统中枢,其病变直接影响人体发育,造成脏器移位或畸形。
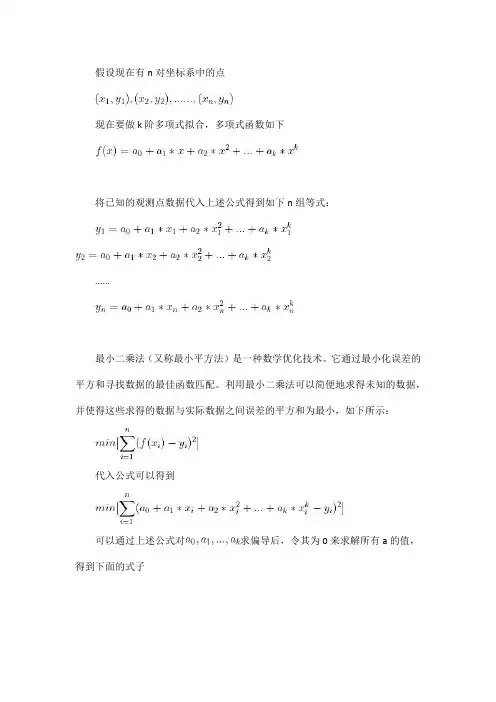
假设现在有n对坐标系中的点
现在要做k阶多项式拟合,多项式函数如下
将已知的观测点数据代入上述公式得到如下n组等式:
......
最小二乘法(又称最小平方法)是一种数学优化技术。
它通过最小化误差的平方和寻找数据的最佳函数匹配。
利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小,如下所示:
代入公式可以得到
可以通过上述公式对求偏导后,令其为0来求解所有a的值,得到下面的式子
......
将上述方程整理归纳得
......
将上述方程用矩阵表述
将上述方程分解,令
,
那么上面的矩阵计算可以简化为,所以得到
网上的一些证明到这里基本就结束了,但我觉得根据逆矩阵的特性还可以优化的,在矩阵中AB的逆等于B的逆乘A的逆,如下
化简可以得到a为X的逆乘Y
计算出X的逆矩阵乘Y得到的就是多项式的系数,就能得到一个多项式了,曲线拟合就算完成了。
但是有没有发现,X的逆矩阵计算量很大,还要明白如何求解逆矩阵的,用程序去实现也有一定难度。
后面会介绍一种法则,求解多项式的系数,套公式即可。
以及用C语言实现最小二乘法的2次曲线拟合算法。
实验三 函数逼近一、实验目标1. 掌握数据多项式拟合的最小二乘法。
2. 会求函数的插值三角多项式。
二、实验问题(1)由实验得到下列数据jx 0.00.10.20.30.50.81.0jy 1.00.410.500.610.912.022.46试对这组数据进行曲线拟合。
(2)求函数在区间上的插值三角多项式。
()2cos f x x x =[,]ππ-三、实验要求1. 利用最小二乘法求问题(1)所给数据的3次、4次拟合多项式,画出拟合曲线。
2. 求函数在区间上的16次插值三角多项式,并画出插值多项()2cos f x x x =[,]ππ-式的图形,与的图形比较。
()f x 3.对函数,在区间上的取若干点,将函数值作为数据进行适()2cos f x x x =[,]ππ-当次数的最小二乘多项式拟合,并计算误差,与上题中的16次插值三角多项式的结果进行比较。
《数值分析》实验报告【实验课题】利用最小二乘法求上述问题所给数据的2次,3次、4次拟合多项式,画出拟合曲线【实验目标】(1)加深对用最小二乘法求拟合多项式的理解(2)学会编写最小二乘法的数值计算的程序;【理论概述与算法描述】在函数的最佳平方逼近中,如果只在一组离散点集()[,]f x C a b ∈()f x 上给出,这就是科学实验中经常见到的实验数据{,0,1,,}i x i m =⋅⋅⋅的曲线拟合,这里,要求一个函数{(,),0,1,,}i i x y i m =⋅⋅⋅(),0,1,,i i y f x i m ==⋅⋅⋅与所给数据拟合,若记误差*()y S x ={(,),0,1,,}i i x y i m =⋅⋅⋅,,设是上*()(0,1,,)ii i S x y i m δ=-=⋅⋅⋅()01,,,Tm δδδδ=⋅⋅⋅01(),(),,()n x x x ϕϕϕ⋅⋅⋅[,]C a b 的线性无关函数族,在中找一个函数,使误差平01{(),(),,()}n span x x x ϕϕϕϕ=⋅⋅⋅*()S x 方和|2222*2()0|||[()][()]min mmmii i i i S x i i i S x y S x y ϕδδ∈=====-=-∑∑∑这里0011|()()()()()n n S x a x a x a x n m ϕϕϕ=++⋅⋅⋅+<这就是一般的最小二乘逼近,用几何语言说,就称为曲线拟合的最小二乘法。
191CASE区域治理基于最小二乘法解决龙格现象成都理工大学 管理科学学院 邹路,常睿春摘要:插值多项式对函数进行逼近并不都有良好的效果,如龙格现象。
对龙格函数选取切比雪夫节点可以解决该问题,但在实际应用中却有诸多不便。
本文采取等距节点逼近函数,利用QR分解法解决由最小二乘法原理引出的线性方程组问题,使最小二乘法自动确定阶次。
本文给出的两个数值实例结果表明该方法的有效性,且消除了龙格现象。
关键词:龙格函数;函数逼近;QR分解;最小二乘法中图分类号:O174文献标识码:A 文章编号:2096-4595(2020)46-0191-0001一、引言龙格函数y=1/(1+25x^2)(1)在[-1,1]区间上采取等距节点,拉格朗日基函数逼近龙格函数时节点选取的越多区间端点附近的误差会越大且产生振荡现象,这被称为龙格现象。
Weierstrass逼近定理指出,对区间[a,b]上的连续函数f(x),可由多项式p(x)逼近到任意精度,故采取等距节点仍可找到一个很好逼近的多项式。
实验中,等距散点数据较切比雪夫节点易于获得,本文在前人基础上提出一种新的解决方法:采取等距节点,基于最小二乘法作插值拟合。
二、最小二乘法原理对于一个函数f(x),只给出一组离散数据点(xi,yi),i=0,1,2,...,m ,这里yi=f(xi)。
设h0(x),h1(x),...,hn(x)是C[a,b]上线性无关函数组,我们要在h=span{h0(x),h1(x),...,hn(x)}中寻找一个函数S *(x)使得2min )(21i *])([])([∑∑=∈=−=−mi i i h x S i mi y x S y x S (2)这里S(x)=a0h0(x)+a1h1(x)+...+anhn (x),(n<=m ,且a0,a1,...,an 不全为零)。
为方便起见记δi=S *(xi)-yi ,则(2)式可记作2220||δδ=∑=mi i 。
曲线拟合(curve-fitting ):工程实践中,用测量到的一些离散的数据},...2,1,0),,{(m i y x i i =求一个近似的函数)(x ϕ来拟合这组数据,要求所得的拟合曲线能最好的反映数据的基本趋势(即使)(x ϕ最好地逼近()x f ,而不必满足插值原则。
因此没必要取)(i x ϕ=i y ,只要使i i i y x -=)(ϕδ尽可能地小)。
原理:给定数据点},...2,1,0),,{(m i y x i i =。
求近似曲线)(x ϕ。
并且使得近似曲线与()x f 的偏差最小。
近似曲线在该点处的偏差i i i y x -=)(ϕδ,i=1,2,...,m 。
常见的曲线拟合方法:1.使偏差绝对值之和最小2.使偏差绝对值最大的最小3.使偏差平方和最小最小二乘法:按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。
推导过程:1. 设拟合多项式为:k k x a x a a x +++=...)(10ϕ2. 各点到这条曲线的距离之和,即偏差平方和如下:3. 问题转化为求待定系数0a ...k a 对等式右边求i a 偏导数,因而我们得到了:.......4、把这些等式化简并表示成矩阵的形式,就可以得到下面的矩阵:5. 将这个德蒙得矩阵化简后可得到:6. 也就是说X*A=Y,那么A = (X'*X)-1*X'*Y,便得到了系数矩阵A,同时,我们也就得到了拟合曲线。
MATLAB实现:MATLAB提供了polyfit()函数命令进行最小二乘曲线拟合。
调用格式:p=polyfit(x,y,n)[p,s]= polyfit(x,y,n)[p,s,mu]=polyfit(x,y,n)x,y为数据点,n为多项式阶数,返回p为幂次从高到低的多项式系数向量p。
x 必须是单调的。
矩阵s包括R(对x进行QR分解的三角元素)、df(自由度)、normr(残差)用于生成预测值的误差估计。
差值里的龙格现象实验临床八年1004张馨予2204100412 一.实验任务:由书上例子2.2和2.3表明适当的提高多项式的次数,有可能提高插值的精度,但是绝对不可能由此认为插值多项的次数越高越好。
此次试验的任务便是验证差值多项式里的龙格现象。
二.算法设计:对函数f(x)=1/(1+25*x*x),(-1<=x<=1).先以xi=-1+2/5i(i=0,1,2,…,5)为节点做五次插值多项式P5(x),再以xi=-1+1/5i(i=0,1,…,10)为节点做十次插值多项式P10(x),并将曲线f(x)=1/(1+25*x*x),y=P5(x),y=P10(x),在区间[-1,1]上,描绘在同一个坐标系。
程序设计,对于插值法,首先计算lagrange差值基本函数lk(x)。
再写出满足差值条件的n次插值多项式Ln(x)=yl(x)的总和。
三.计算机程序:1.求5个点对应y值的m文件function y=flongge2x=-1:0.4:1for i=1:length(x)y(i)=1/(1+25*x(i)*x(i));enddisp(y)2.求10个点对应y值的函数文件function y=flongge2x=-1:0.2:1for i=1:length(x)y(i)=1/(1+25*x(i)*x(i));enddisp(y)3. 差值里的龙格现象function f=Language(x,y,x0)syms t;if(length(x)==length(y))n=length(x);elsedisp('xand y are not of the same demision');return;endf=0.0;for(i=1:n)l=y(i);for(j=1:i-1)l=l*(t-x(j))/(x(i)-x(j));end;for(j=i+1:n)l=l*(t-x(j))/(x(i)-x(j));end;f=f+l;f=simplify(f);if(i==n)if(nargin==3)f=subs(f,'t',x0)elsef=collect(f);f=vpa(f,6);endendend并在命令编辑器里输入x y 矩阵,以及f=Language(x,y)4.龙格总图的m文件functiontu=longgezongtufplot('-220.940*t^10+494.907*t^8-381.433*t^6+123.360*t^4-16.8552*t^2+1.',[-1,1] ),holdon;fplot('1/(1+25*x*x)',[-1,1]), hold on;fplot('1.20199*t^4-1.73079*t^2+.567309',[-1,1],1e-4),grid四.调试以及运行结果1.在命令编辑器里输入flongge2,得到十个点的对应y值:(截的图)2.输入f,得到五个点对应的y值:3.在命令编辑器里输入x矩阵,和y矩阵,以及f=Language(x,y),就会得到对应的两个差值公式:y=-220.940*t^10+494.907*t^8-381.433*t^6+123.360*t^4-16.8552*t^2+1.y=1.20199*t^4-1.73079*t^2+.567309根据这两个公式编出可以输出图的程序。
常用数值分析方法常用数值分析方法指的是应用数值计算方法研究和解决实际问题的一类方法。
它涉及到计算机科学、数学、算法及相关工程应用等多个领域的交叉应用,被广泛应用于科学研究、工程设计、经济分析、物理模拟、天气预测等领域。
以下是常用的数值分析方法的介绍。
1.插值法:插值法是通过已知数值点的函数值来推导任意点的函数值。
其中最常用的方法是拉格朗日插值法和牛顿插值法。
插值法在数值计算、图像处理、信号处理等领域有广泛应用。
2.数值微分与积分:数值微分和积分方法是通过一系列近似计算来求解微分和积分问题,常用的方法有数值微分公式、数值积分公式和龙格-库塔方法等。
这些方法在工程数学、物理学、金融学等领域得到了广泛应用。
3.非线性方程求解:非线性方程求解方法用于求解形如f(x)=0的非线性方程,在科学计算和工程设计中具有重要作用。
常用的方法有二分法、牛顿法、割线法、迭代法等。
4.数值优化:数值优化方法是求解最优化问题的一种方法,常用的算法有梯度下降法、共轭梯度法、拟牛顿法、模拟退火算法、遗传算法等。
这些方法被广泛应用于机器学习、数据挖掘、工程设计等领域。
5.差分方程与差分法:差分方程是运用差分近似的数值方法来求解常微分方程的一种方法。
常用的差分法有向前差分法、向后差分法、中心差分法等。
差分法在数值模拟、物理仿真等领域有广泛应用。
6.线性代数方程组的数值解法:数值解线性代数方程组是数值分析中的经典问题之一、常用的算法有高斯消元法、LU分解法、迭代法(如雅可比法、高斯-赛德尔法、稀疏矩阵迭代法)等。
7.数值逼近与最小二乘拟合:数值逼近和最小二乘拟合方法是通过一系列近似计算来拟合和逼近已知的数据集。
常用的方法有多项式拟合、最小二乘法、曲线拟合、样条插值等。
这些方法在数据分析、信号处理、模糊识别等方面有广泛应用。
8.数值统计:数值统计方法是通过数值计算和统计学方法来处理和分析实际数据。
常用的方法有假设检验、参数估计、方差分析、回归分析等。