模糊系统与模糊控制简介相关分析
- 格式:ppt
- 大小:198.00 KB
- 文档页数:58
模糊系统及其应用研究一、引言随着科学技术的快速发展和社会的不断进步,人类社会已经正式步入信息化社会。
信息与知识已经成为社会发展的新要素和新引擎。
模糊系统,也称模糊逻辑或模糊数学,是信息科学中的一种新兴学科,是处理模糊信息的一种有效方法。
本文将详细介绍模糊系统及其应用研究。
二、模糊系统概述模糊系统是以模糊集合和模糊逻辑为基础的一种数学理论和方法,其主要特点是对信息的模糊性进行了有效处理,解决了传统集合和逻辑的不足。
模糊集合是指具有模糊性的集合,模糊逻辑是指运用模糊语言来表达的逻辑。
模糊系统的主要应用领域包括控制、决策、识别、智能优化、模式识别、数据挖掘等。
三、模糊系统的应用研究1. 模糊控制模糊控制是以模糊理论为基础的一种新的控制方法,其目的是解决传统控制方法对于非线性、大惯性、时变等复杂系统无法提供有效控制的问题。
模糊控制系统的最大特点是具有灵活性、自适应性、多功能性和鲁棒性等优势。
模糊控制在机械、航空、环保等领域都得到了广泛的应用。
2. 模糊决策模糊决策是以模糊数学为基础的一种决策分析方法,其主要特点是对决策过程中模糊性信息的处理能力较强。
模糊决策广泛应用于工程领域的高风险决策、金融投资决策、产品质量评估等方面。
3. 模糊识别模糊识别是一种针对未知模型的识别方法,主要特点是其对模型不确定性、非线性、时变等复杂模型的准确识别能力较强。
模糊识别广泛应用于质量控制、机械故障诊断、金融市场预测等领域。
4. 模糊优化模糊优化是以模糊集合理论为基础的一种优化方法,其主要特点是可以适应非线性、模糊或者不确定的优化问题。
模糊优化适用于生产计划、物流运输、供应链管理等复杂的管理决策问题。
5. 模糊数据挖掘模糊数据挖掘是一种基于模糊数学理论的数据分析方法,其主要特点是处理不完整数据,解决数据挖掘中的误导性和随机性问题。
模糊数据挖掘适用于企业管理、社会调查、市场预测等领域的数据处理。
四、总结模糊系统是人工智能、控制理论等领域的重要方法之一,其主要特点是处理模糊信息的能力强。

模糊理论在模糊控制中的应用——模糊控制系统摘要:模糊控制技术对工业自动化的进程有着极大地推动作用。
本文简要的讲述了模糊控制理论的起源及基本原理,详细分析了模糊控制器的设计方法,最后就典型的模糊控制系统原理和新型模糊控制系统应用进行了分析正文:一:模糊理论1.1模糊理论概念:模糊理论(Fuzzy Theory)是指用到了模糊集合的基本概念或连续隶属度函数的理论。
它可分类为模糊数学,模糊系统,不确定性和信息,模糊决策这五个分支,它并不是完全独立的,它们之间有紧密的联系。
1.2模糊理论产生:1965年,模糊理论创始人,美国加州福尼亚大学伯克利分校的自动控制理论专家L.A.Zadeh教授发表了题为“Fuzzy Set”的论文,这标志着模糊理论的诞生。
这一理论为描述和处理事务的模糊性和系统中的不确定性,以及模拟人所特有的模糊逻辑思维功能,从定性到定量,提供了真正强有力的工具。
1966年,马里诺斯发表了模糊逻辑的研究报告,而Zadeh进一步提出了著名的模糊语言值逻辑,并于1974年进行了模糊逻辑推理的研究。
由于这一研究和观点反映了客观世界中普遍存在的事务,它一出现便显示出强大的生命力和广阔的发展前途,在自然科学,其他科学领域及工业中得到了迅速的广泛的应用。
二:模糊控制理论2.1模糊控制理论的产生:在控制技术的应用过程中,对于多变量、非线性、多因素影响的生产过程,即使不知道该过程的数学模型,有经验的操作人员也能够根据长期的实践观察和操作经验进行有效地控制,而采用传统的自动控制方法效果并不理想。
从这一点引申开来,是否可将人的操作经验总结为若干条控制规则以避开复杂的模型建造过程?模糊控制理论与技术由此应运而生。
20世纪70年代模糊理论应用于控制领域的研究开始盛行,并取得成效。
其代表是英国伦敦大学玛丽皇后分校的E.H.Mamdani教授将IF-THEN型模糊规则用于模糊推理,并把这种规则型模糊推理用于蒸汽机的自动运转中。
模糊系统与智能控制技术随着人工智能技术的不断发展,智能控制技术作为重要的一部分也得到了快速的发展。
其中,模糊系统作为智能控制的重要手段之一,逐渐在工程技术中得到了广泛应用。
一、模糊系统概述模糊系统指的是一类基于模糊数学理论为基础的人工智能系统,用于处理不确定、模糊、复杂的信息和控制问题。
模糊系统一般由模糊集合、模糊逻辑、模糊推理和模糊控制等组成。
模糊集合是模糊系统中的基本概念,通过模糊集合的模糊度来描述信息的不确定性和模糊性。
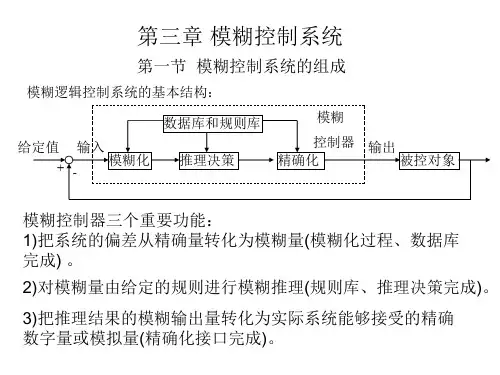
二、模糊系统在智能控制中的应用在智能控制中,模糊系统应用广泛,主要表现在以下方面:1.模糊控制模糊控制是模糊系统在控制领域中的一种应用,其核心是建立模糊控制器,通过输入变量经过模糊化、规则匹配和解模糊等过程,输出模糊控制量,控制被控对象达到某种期望状态或优化目标。
2.模糊识别模糊识别是指将输出与输入之间的模糊关系进行建模,并通过一定的方法求解识别问题。
常用的模糊识别方法包括模糊C均值聚类、模糊决策树等。
3.模糊优化模糊优化是将模糊规划和优化算法相结合,通过求解模糊集合上的优化问题,确定最优决策方案。
三、模糊系统的优势和不足模糊系统作为一种智能控制技术,在实际应用中有其独特的优势,包括:1.建模简单对于一些复杂、模糊、不易准确建模的问题,采用模糊系统可以使建模过程更加容易,而且表现出的精度和可靠性也比较高。
2.适应性强模糊系统具有一定的自适应性和鲁棒性,在面对变化和不确定性的环境中,能够更好地适应环境变化。
但是,模糊系统也有一定的不足之处,主要包括:1.复杂性高由于模糊系统需要考虑许多未知且不可测的因素,因此其模型结构比较复杂,不易于实现。
2.性能不稳定模糊系统的性能受到多种因素的影响,因此在一些极端情况下,很难保证控制效果的稳定性。
四、结语综上所述,模糊系统作为一种智能控制技术,在实际应用中能够解决许多不确定、模糊、复杂的信息和控制问题,并具有一些独特的优势。
随着人工智能技术的不断发展,相信模糊系统在未来的应用中也会发挥更大的作用。
目录摘要........................................................................ (1)1模糊控制简介................................................................................ .. (1)模糊控制方法的研究现状 (2)模糊控制的特色...........................................................................2模糊控制的研究对象 (3)模糊控制的展望............................................................................32模糊控制器的结构与工作原理 (4)根本结构与构成............................................................................4一般模糊控制器各主要环节的功能 (4)隶属函数的确定原那么和根本确立方法 (5)模糊条件语句与模糊控制规那么 (6)模糊量的裁决方法 (6)模糊控制规那么的设计和模糊化方法 (8)解模糊化.......................................................................... (8)3模糊控制器的设计................................................................................94对于模糊(及智能)控制理论与技术展开的思虑 (11)参照文件.................................................................................. (12)摘要纲要:本文主要介绍了模糊控制系统的研究现状、特色,以及模糊控制器的结构与工作原理。
模糊控制系统的稳定性分析模糊控制系统是一种基于模糊逻辑原理设计的控制系统,广泛应用于各个领域。
稳定性是评价一个控制系统性能的重要指标之一。
本文将对模糊控制系统的稳定性进行分析,并探讨一些常见的稳定性分析方法。
一、模糊控制系统简介模糊控制系统是一种基于模糊逻辑原理的控制系统,它可以通过将模糊集合论应用于控制系统中,使得系统对于复杂、不确定的问题有更好的适应性和鲁棒性。
与传统的精确控制系统相比,模糊控制系统更加灵活和自适应。
二、模糊控制系统的稳定性条件为了保证模糊控制系统的稳定性,需要满足一定的条件。
一般而言,模糊控制系统的稳定性可以通过以下两个条件来保证:1. 模糊控制规则矩阵的稳定性模糊控制系统的控制规则矩阵是描述系统输入和输出之间关系的重要组成部分。
为了保证系统的稳定性,控制规则矩阵需要满足稳定条件。
一般而言,控制规则矩阵的特征值应该位于单位圆内,即控制规则矩阵的特征值的模不大于1。
2. 输入-输出关系的稳定性模糊控制系统的稳定性还取决于输入-输出关系的稳定性。
即控制系统的输入与输出之间的关系应该是稳定的,不能发生不可控或不可预测的变化。
三、模糊控制系统稳定性分析方法为了分析模糊控制系统的稳定性,可以采用一些常见的方法。
1. 利用Lyapunov稳定性定理Lyapunov稳定性定理是评估非线性系统稳定性的常用方法。
在模糊控制系统中,可以利用Lyapunov稳定性定理来分析系统的稳定性。
具体而言,需要构造一个Lyapunov函数,并证明该函数在系统状态空间中是下降的。
如果Lyapunov函数是正定的并且它的导数是负定的,那么系统就是稳定的。
2. 利用熵的概念熵是信息论中用于评估系统不确定性的一个指标。
在模糊控制系统中,可以将熵的概念应用于稳定性分析中。
通过计算系统的熵,可以评估系统的稳定性。
如果系统的熵趋于稳定或减少,那么系统就是稳定的。
3. 基于隶属度的稳定性分析方法在模糊控制系统中,隶属度是用来描述模糊集合的模糊度的一个指标。
模糊控制介绍附件:一、模糊控制概况模糊逻辑控制(Fuzzy Logic Control)简称模糊控制(Fuzzy Control),是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。
1965年,美国的L.A.Zadeh创立了模糊集合论;1973年他给出了模糊逻辑控制的定义和相关的定理。
1974年,英国的E.H.Mamdani 首先用模糊控制语句组成模糊控制器,并把它应用于锅炉和蒸汽机的控制,在实验室获得成功。
这一开拓性的工作标志着模糊控制论的诞生。
模糊控制实质上是一种非线性控制,从属于智能控制的范畴。
模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
模糊控制的发展最初在西方遇到了较大的阻力;然而在东方尤其是在日本,却得到了迅速而广泛的推广应用。
近20多年来,模糊控制不论从理论上还是技术上都有了长足的进步,成为自动控制领域中一个非常活跃而又硕果累累的分支。
其典型应用的例子涉及生产和生活的许多方面,例如在家用电器设备中有模糊洗衣机、空调、微波炉、吸尘器、照相机和摄录机等;在工业控制领域中有水净化处理、发酵过程、化学反应釜、水泥窑炉等的模糊控制;在专用系统和其它方面有地铁靠站停车、汽车驾驶、电梯、自动扶梯、蒸汽引擎以及机器人的模糊控制等。
二、模糊控制基础模糊控制的基本思想是利用计算机来实现人的控制经验,而这些经验多是用语言表达的具有相当模糊性的控制规则。
模糊控制器(Fuzzy Controller,即FC)获得巨大成功的主要原因在于它具有如下一些突出特点:模糊控制是一种基于规则的控制。
它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。
由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取、动态特性不易掌握或变化非常显著的对象非常适用。
模糊控制及其在工业中的应用模糊控制作为一种新兴的控制方法,已经在工业控制领域中得到了广泛的应用。
相比于传统的控制方法,模糊控制具有更强的适应性和容错性,特别适合于复杂变化的工业环境。
本文将简单介绍模糊控制的基本概念和操作原理,并重点探讨其在工业应用中的优点和实际效果。
一、模糊控制概述模糊控制是一种针对模糊系统(即输入与输出之间不存在确定关系的系统)的控制方法。
这种方法其实是将模糊逻辑与控制理论相结合,形成了一套具有自适应性和容错性的控制方案。
模糊控制有广泛的应用领域,例如温度控制、气压控制、流量控制等等。
二、模糊控制原理模糊控制的基本原理是将控制系统中的输入(例如传感器采集的数据)转化为一个或多个模糊集合,然后对其进行处理并得出相应的输出(例如对某一机器的控制指令)。
简单来说,就是将现实世界中的模糊输入映射到模糊输出上。
具体实现方式有很多种,常见的操作包括模糊化、推理、去模糊化等。
模糊化是将模糊输入值映射到一个或多个模糊集合中。
假设我们要控制一台机器的转速,输入值是机器转速仪器采集到的数据。
我们可以将这些数据映射到“低速”、“中速”和“高速”三个模糊集合上,并根据具体情况划分每个集合的范围。
推理是将模糊输入值与事先设置的控制规则相匹配,从而得到相应的控制输出。
例如,当机器转速处于“低速”状态时,我们可能会规定控制指令为“加速”;当机器转速处于“高速”状态时,我们可能会规定控制指令为“减速”。
去模糊化是将模糊输出映射到具体的数值控制指令上。
例如,当我们得到了一个模糊输出“加速”时,需要将其转化为具体的机器转速指令,例如“增加20%的转速”。
三、模糊控制在工业中的优点和实际效果模糊控制在工业中的应用有很多优点。
首先,由于模糊控制具有适应性和容错性,可以在复杂多变的工业环境下进行控制。
其次,模糊控制的控制算法相对简单,不需要过多的数学计算和模型推导,降低了系统开发的难度和时间。
最后,模糊控制的参数调整也比较容易,不像传统控制方法需要通过复杂的数学模型和计算获得最优参数值。
控制系统模糊规则控制系统模糊规则是指在模糊控制系统中,用于描述输入与输出之间关系的一系列规则。
模糊控制系统是一种基于模糊逻辑的控制方法,通过定义模糊规则来实现对系统的控制。
一、模糊控制系统简介模糊控制系统是利用模糊集合和模糊逻辑来进行控制的一种方法。
与传统的控制系统相比,模糊控制系统更能应对现实世界中模糊、不确定的问题。
在传统控制系统中,需要准确地测量和量化输入变量和输出变量,并根据数学模型进行精确的运算。
而在模糊控制系统中,输入和输出可以是模糊的,可以用模糊集合来描述。
模糊集合可以将不确定性和模糊性直观地表示出来,使得控制系统更灵活、更易于实现。
二、模糊规则的结构模糊规则是模糊控制系统中最重要的部分,它用于描述输入与输出之间的关系。
一个模糊规则通常由两个部分组成:条件部分和结论部分。
条件部分描述了输入变量的状态,而结论部分描述了输出变量的状态。
在模糊规则中,条件部分和结论部分都可以使用模糊语言词来描述。
模糊语言词通常是由一组模糊集合构成的,每个模糊集合表示了一个状态或属性。
例如,对于一个汽车的速度控制系统,条件部分可以包括输入变量“车速”和“车距”,而结论部分可以包括输出变量“加速度”。
三、模糊规则的设计在设计模糊规则时,需要根据具体的控制系统和控制目标来确定合适的模糊语言词和模糊集合。
模糊集合的设计可以基于专家经验或者通过数据分析进行。
模糊规则的数量和形式对系统性能有着重要的影响。
过少的模糊规则会导致控制系统的响应不够准确,而过多的模糊规则会增加系统的计算复杂度。
因此,在设计模糊规则时需要进行适当的折衷。
一种常用的方法是采用模糊规则表的形式,将不同输入变量的取值组合与输出变量的取值进行匹配。
四、模糊规则的推理在模糊控制系统中,通过将输入变量的模糊集合与相应的模糊规则进行匹配,得到输出变量的模糊集合。
这个过程称为模糊规则的推理。
模糊规则的推理通常使用模糊推理方法来进行。
模糊推理方法包括模糊匹配和模糊逻辑运算。