第十四次课 陀螺仪表
- 格式:ppt
- 大小:1.03 MB
- 文档页数:17

航空陀螺仪一、陀螺仪的基本知识陀螺玩具旋转时,能够直立在地上;而且转得愈快,立得也愈稳;即使给它一个冲击,也只是晃动而不会倒下。
陀螺的这种特性可以被利用来做成仪表用来测量飞机的姿态角、航向角和角速度。
航空陀螺仪表中的陀螺仪,是把绕自转轴(又叫转子轴)高速旋转的转子用框架支撑起来,使转子绕垂直于自转轴方向可以自由转动的这样一种装置。
图8.1表示的是,转子安装在内环和外环这两个框架中,转子可绕自转轴高速旋转,转子同内环可绕内环轴转动,转子同内环和外环还可绕外环轴转动这样支承起来的转子可以绕着垂直于自转轴的两根轴转动,这种装置称为三自由度陀螺仪。
若转子仅安装于内环中这样支承起来的转子只能绕着垂直于自转轴的一根轴转动这种装置称为二自由度陀螺仪。
三自由度陀螺仪的基本特性之一是稳定性(又叫定轴性)。
当转子高速旋转时,因具有很大的惯性,自转轴能够保持原来的方向稳定;无论基座怎样转动,自转轴所稳定的方向都将保持不变;同使受到冲击作用,自转轴也仅在原来的方位附近作一种高频微幅的振荡运动。
陀螺仪具有抵抗干扰作用而力图保持自转轴方向稳定的特性叫做螺仪的稳定性。
陀螺仪的又一基本特性是进动性。
当转子高速旋转时,若外力矩绕外环轴作用,陀螺仪将绕内环轴转动;若外力矩绕内环轴作用,陀螺仪将绕外环轴转动。
陀螺仪转动角速度方向与外力矩作用方向互相垂直的特性,叫做陀螺仪的进动性。
进动角速度的方向取决于转子动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,可用右手定则确定。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为 =M/H。
如果这种进动由陀螺仪中的干扰力矩引起,则叫做漂移,漂移角速度即漂移率是衡量各种陀螺仪表精度的最重要的指标。
至于二自由度陀螺仪的特性,就与三自由度陀螺仪不同。
二自由度陀螺仪少了垂直于内环轴和自转轴方向的转动自由度。
这样,当基座绕着这个缺少自由度的轴线转动时,通过内环轴上一对轴承的推动,就强迫陀螺仪跟随基座转动;与此同时,基座作用于内环两端轴承上的推力形成了推力矩将强迫陀螺绕内环轴进动,使自转轴趋于基座转动角速度的方向重合。

陀螺仪实验陀螺仪是一种具有比较复杂的运动学和动力学现象的装置,它有一个高速旋转的定点运动转子,该转子的轴线具有定向性,这是陀螺的最大特点。
陀螺的定向性在工程中有重要用途,如舰船和导弹的导航、稳定船舶和车辆的姿态,实际上行驶的自行车能够不翻倒也是由于陀螺的定向性,这时自行车的两个轮子就是陀螺。
因此,陀螺仪实验对于学生巩固和提高所学运动学、动力学知识,对复杂运动规律的认知和分析计算都有重要作用。
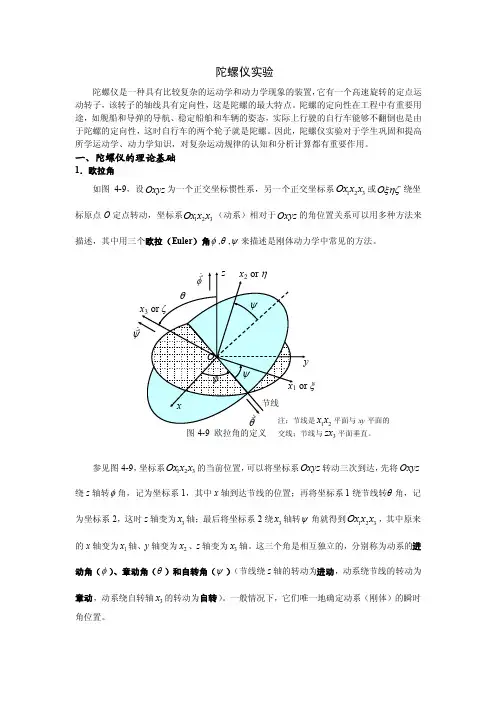
一、陀螺仪的理论基础1.欧拉角如图4-9,设Oxyz 为一个正交坐标惯性系,另一个正交坐标系321x x Ox 或O ξηζ绕坐标原点O 定点转动,坐标系321x x Ox (动系)相对于Oxyz 的角位置关系可以用多种方法来描述,其中用三个欧拉(Euler )角φ,θ,ψ来描述是刚体动力学中常见的方法。
参见图4-9,坐标系321x x Ox 的当前位置,可以将坐标系Oxyz 转动三次到达,先将Oxyz 绕z 轴转φ角,记为坐标系1,其中x 轴到达节线的位置;再将坐标系1绕节线转θ角,记为坐标系2,这时z 轴变为3x 轴;最后将坐标系2绕3x 轴转ψ角就得到321x x Ox ,其中原来的x 轴变为1x 轴、y 轴变为2x 、z 轴变为3x 轴。
这三个角是相互独立的,分别称为动系的进动角(φ)、章动角(θ)和自转角(ψ)(节线绕z 轴的转动为进动,动系绕节线的转动为章动,动系绕自转轴3x 的转动为自转)。
一般情况下,它们唯一地确定动系(刚体)的瞬时角位置。
再来确定动系321x x Ox 的角速度矢量Ω。
在~t t t +∆的t ∆时间内,设动系角位置的无穷小增量为φ∆、θ∆和ψ∆,动系的这种无穷小角位置改变可以将动系分别绕z 轴转φ∆、绕节线转θ∆和绕3x 轴转ψ∆后叠加得到,且结果与转动次序无关(我们对此不作证明,但必须注意,刚体多次有限转动的结果却与转动次序有关,因此不能叠加;学生可以将一本书沿任意两条边以一种次序各转90︒,再重新按不同的次序各转90︒,结果是不同的)。

目录实验一、陀螺仪实验 (2)实验二、直导体外的磁场 (3)实验三、螺线管内的磁场 (4)实验四、分米波的特性............................................... .5 实验五、天线辐射的方向特性 (6)实验六、电子荷质比 (7)实验七、热空气发动机 (8)实验八、空气中的声速测量 (10)实验九、音叉基频的测量 (11)实验十、测量空气阻力 (12)实验一、陀螺仪实验实验目的:1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率和外力矩的关系;4、观察和研究陀螺仪的章动频率与回转频率的关系。
实验仪器:1、三轴回转仪;2、计数光电门;3、光电门用直流稳压电源(5伏);4、陀螺仪平衡物;5、数字秒表(1/100秒);6、底座(2个);7、支杆(2个);8、砝码50克+10克(4个);9、卷尺或直尺。
相关术语:转动惯量,力矩,角动量,进动,章动 实验原理:1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度α为:α=d ωR /dt=M/I P (1)式中ωR 为陀螺仪盘的角速度,I P 为陀螺仪盘的转动惯量。
M=F .r 为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:F=m(g-a) (2)式中g 为重力加速度,a 为轨道加速度(或线加速度) 轨道加速度与角加速度的关系为:a=2h/t F 2; α=a/r (3)式中h 为砝码下降的高度,r 如图1所示为转轴的半径,t F 为下落的时间。
将(2)(3)代入(1)可得:h mgrmr I t P F22222+= (4) 测量多组t F 和h 的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物W 使陀螺仪AB 轴(X 轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕X 轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量L :L =I P .ωR (5)当在陀螺仪的另一端挂上砝码m (50g )时就会产生一个附加的力矩M *,这将使原来的角动量发生改变:dL/dt =M *=m *gr * (6)由于附加的力矩M *的方向垂直于原来的角动量的方向,将使角动量L 变化dL ,由图1可见: dL=Ld ϕ这时陀螺仪不会倾倒,在附加的力矩M *的作用下将会发生进动。


个人房屋买卖合同范本最新甲方(出卖人):姓名:___________________身份证号:_____________________联系方式:______________家庭住址:______________乙方(买受人):姓名:___________________身份证号:_____________________联系方式:______________家庭住址:______________鉴于甲方是房屋合法所有人,乙方有意购买该房屋,双方在平等、自愿、公平的基础上,就房屋买卖事宜达成以下协议:一、房屋基本情况1. 房屋坐落地址:_______________________________;2. 房屋结构类型:_______________________________;3. 房屋建筑面积:_______________________________;4. 房屋附属设施:____________________________________________________。
二、买卖条件1. 房屋价格:双方商定,房屋总价为人民币(大写)_______________________元整(¥_______元)。
2. 付款方式:乙方应按照以下方式支付房款:(1)本合同签订之日,乙方支付定金人民币(大写)__________元整(¥_____元)给甲方;(2)房屋过户手续办理完毕后,乙方支付余款人民币(大写)____________元整(¥______元)。
3. 税费承担:甲乙双方按照国家和地方有关规定,各自承担相关税费。
4. 房屋交付:甲方应于本合同签订之日起______天内,将房屋交付给乙方。
三、甲方保证1. 甲方保证所售房屋没有产权纠纷,不存在债权债务问题;2. 甲方保证已如实陈述房屋权属状况、附属设施及维修情况;3. 甲方保证所售房屋符合国家及所在区域的相关政策和规定。
四、乙方责任1. 乙方应按照约定时间支付房款;2. 乙方应配合甲方办理房屋过户手续;3. 乙方应按时接收房屋,并完成房屋交接手续。
![陀螺仪原理实验指导书1[1]](https://uimg.taocdn.com/e3c418679b6648d7c1c74612.webp)
陀螺仪原理实验指导书王军惯性导航实验室惯性技术基础实验(一)——陀螺特性一、陀螺仪陀螺仪的基本结构如图1,中间是一个转子,转子的轴叫主轴,又称Z轴。
转子和主轴还可以绕水平轴(又称Y轴)转动;又可以绕垂直轴(又称Z轴)转动。
这样,陀螺仪的主轴可以指向空间任何方向。
这种陀螺仪称为自由陀螺仪。
图1 陀螺仪基本结构为讨论方便,我们规定用“右手法则”来确定主轴旋转的正方向,右手握拳,拇指与四指垂直,四指顺着转子的转动方向,拇指所指的方向就是主轴的正方向。
我们实验室所用的陀螺仪为电动陀螺仪,是航海型电罗经回转球里的一个陀螺马达,所用电源为三相110V 330周。
正常转速为19800转/分。
由于转速比较高,陀螺特性就比较明显。
二、陀螺仪第一特性——定轴性当陀螺仪的转子尚未旋转之前,我们就不能从它的装置中察觉出它与通常的非陀螺体有任何不同的现象。
关于非陀螺体,这里所指的是实验以前不具有动量矩的物体。
当陀螺仪的转子以高速绕其极轴Z旋转时,不管怎样移动或转动它的座底。
如图2主轴在空间所指的方向不变。
主轴指向的稳定与否,决定于转子的转速与重量。
转速高、重量重、指向性就强。
指向性强的陀螺仪,即使受到短时间的强烈冲击加于平衡环上时,对主轴原来的位置却不会产生明显的效果。
tH=d d 若支撑摩擦力矩很小可忽略不计时,又当外力矩为零,即0=M ,则:0d d =tH该式表示动量矩H 在瞬刻时间内没有变化,即表示陀螺转子动量矩H 大小不变,方向也不变。
因此陀螺仪主轴的指向就不变。
三、陀螺仪的第二特性——进动性在外加力矩作用下,陀螺仪运动的特性发生变化,加在陀螺仪外平衡环上的力矩会引起陀螺仪绕内平衡环轴而旋转。
反之,加在内平衡环上的力矩,会引起陀螺仪绕外平衡环轴而旋转。
当外加力矩的方向改变时,则平衡环的转动方向也随之改变。
假设有一外力F 作用在陀螺仪的主轴上,如图3,如果转子是不动的,那么主轴就要沿着F 力的作用方向向下运动。
它使整个转子绕着Y 轴转动。
陀螺:绕支点高速旋转的物体。
陀螺结构:转子、内框、外框。
种类:三自由度陀螺、二自由度陀螺、垂直陀螺、方位陀螺、新型陀螺。
陀螺特性稳定性:三自由度陀螺保持其自转轴(或动量矩矢量)在空间的方向不发生变化的特性。
定轴性:当三自由度陀螺转子高速旋转后,若不受外力矩的作用,不管基座如何转动,支承在万向支架上的陀螺仪自转轴指向惯性空间的方位不变;章动:陀螺受到瞬时冲击力矩作用后,自转轴在原位附近做微小的圆锥运动,其转子轴的大方向基本不变。
三自由度陀螺特性:稳定性(定轴性、章动)、进动性。
二自由度陀螺特性:进动、受迫运动自由陀螺定义:陀螺仪重心与支点重合,轴承没有摩擦力的三自由度陀螺。
地磁三要素:磁倾、地磁水平分量、磁差地平仪的主要任务是在飞机上模拟一个人工水平面,也即模拟一条当地地垂线。
组成:三自由度陀螺、摆式地垂修正器、控制机构(摆的控制机构和陀螺的控制机构)、指示部分。
修正系统分类(按敏感元件)常值式、比例式、复合式。
姿态角定义:真实俯仰角:飞机纵轴与水平面夹角。
真实倾斜角:飞机绕纵轴转过的角度。
非真实俯仰角:飞机绕横轴转过的角度。
非真实倾斜角:飞机横轴与水平面的夹角。
四种航向:真航向:自真北顺时针方向计量到航向线的角度。
磁航向:飞机纵轴在地平面上的投影,与磁子午线的夹角(磁北为正,顺时针旋转)。
罗航向:罗经线北段顺时针量到航向线的角度。
大圆航向:飞机沿大圆圈线飞行时,飞机纵轴所在的大圆圈平面与航线起始点的真子午面的夹角叫大圆航向角,简称大圆航向。
转弯仪作用:指示飞机转弯的方向;粗略反映飞机转弯的角速度;用来指示规定某型飞机巡航速度条件下飞机无侧滑转弯时的倾斜角。
左转弯时,指向右,转弯角速度矢量向上,陀螺力矩向前,内框向右转动,直到陀螺力矩等于弹性力矩,内框转角通过拨杆传送机构使指针左偏。
转弯停止,弹簧力矩使指针回中。
飞机绕横轴或纵轴转动时,转弯仪不指示。
陀螺稳定平台的分类:直接陀螺稳定器;动力陀螺稳定器;间接陀螺稳定器航向陀螺仪(陀螺半罗盘)基本工作原理(1)测量飞机的转弯角度;(2)测量飞机的大圆航向。