2017年大学生数学建模A题CT系统标定成像论文
- 格式:pdf
- 大小:1011.16 KB
- 文档页数:20
数模国赛2017A题原创优秀论文三、模型假设1.假设CT光源的旋转中心在探测器的中垂线上。
2.假设X光不会发生衍射等其他影响吸收强度的现象。
四、符号说明五、模型建立与求解1.问题一1.1.建立坐标系椭圆方程较为复杂,为方便分析,选择在椭圆中心建立直角坐标系,可得模板椭圆和圆的方程为:1.2. 增益的确定1.2.1 的模型查阅资料可知X光吸收强度与其穿过的介质长度和密度有关,令模板的密度函数为,可得由于椭圆和圆模板均为均匀介质,可认为为常数,可得可知X光吸收强度和其穿过的介质长度呈正比,令增益,即可得1.2.2 的计算选取中非0数据最多的六列数据,可以有效减小系统误差。
取每一列数据数值最大的几个值,其表示椭圆短轴和圆直径吸收衰减后的X射线能量经增益处理的量值,取六个方向平均值,对应为38;同理选取中非0数据最少的六列数据,此时探测器位于平行于x 轴的位置,两段不为0 数据中的最大值分别表示椭圆长半轴和圆直径吸收衰减后的射线能量增益后的量值,取三个方向平均值分别得,对应的,为80 和8。
对这三组数据用excel进行最小二乘法拟合,得到μ=1.7713。
过程如图所示:1.3 探测器间距离确定通过附件2,可知中每一列非0数据的个数,即为X光源截得相应弦长,对应的探测器的个数。
则当探测器平行于y轴时,探测器的个数最多;平行于x轴时,探测器的个数最少。
将附件2数据,用Matlab可视化,如图可确定在,有最少个数探测器;,有最多个数探测器。
得到当时,之间,有个探测器;当时,之间,有个探测器。
最终可算出取均值得1.4 旋转中心的确定当时,设第行, 使得取到最大值;当时,设第行, 使得取到最大值,。
显然当时,其X射线路径通过原点。
其截得模板的长度分别为椭圆长轴和短轴。
有1.3图像可知:将在这两个位置将椭圆中心即坐标系原点与旋转中心之间的探测器单元数目差值分别确定,找到模板和探测器系统的相对位置,代入d 值,分别求得纵坐标和横坐标。
CT系统参数标定及成像问题摘要:针对CT系统参数标定及成像问题,要求利用已知结构模板标定系统参数,对未知介质进行探测成像,给出该未知介质相关信息,并设计新模板,建立对应的标定模型,以改进标定精度和稳定性。
关键词:CT系统 Radon变换参数标定投影定理一、问题分析2.1问题一的分析对于问题一,题目要求根据已知结构的模板,建立数学模型来标定系统参数。
首先分析附录给出的数据,总结经位置固定不动的二维待检测介质吸收衰减后的射线能量在512个等距单元的探测器上的规律,得到探测器单元的距离。
进而根据投影定理,椭圆中心与小圆圆心的连线在探测器单元上的投影长度和实际长度的比值为圆心连线与投影线夹角的余弦值,由此可得到随整个发射-接收系统的旋转角值,即该CT系统使用的X射线的180个方向。
最后利用Radon变换,分析得到CT系统旋转中心在正方形托盘中的位置。
2.2 问题二的分析对于问题二,为了确定该未知介质在正方形托盘中的位置、几何形状和吸收率等信息,可对附录3得到的图像进行像素大小变换处理,得到与正方形托盘相同大小的图像,从而确定图像的相关信息,并给出指定10个位置的吸收率。
2.3 问题三的分析对于问题三,对附录5得到该未知物体的图像,经过像素大小变换处理,得到与正方形托盘相同大小的图像,从而确定图像的相关信息,并给出指定10个位置的吸收率。
2.4 问题四的分析对于问题四,首先分析问题一中参数标定的精度和稳定性,考虑其中的各种误差,在此基础上设计新的模板、建立对应的标定模型,对模型的误差和缺点进行改进,从而提高标定精度和稳定性。
二、模型假设与约定(1)假设室内温度恒定,物体不产生热胀冷缩现;(2)假设发射-接收系统相对于正方形托盘水平;(3)假设探测点分布均匀;(4)假设正方形托盘水平无凹凸;(5)假设每束X光频率强度相同。
三、模型的建立与求解1.探测器单元的距离CT可以在不破坏样品的情况下,利用样品对射线能量的吸收特性对生物组织和工程材料的样品进行断层成像,由此获取样品内部的结构信息。
CT系统参数标定及成像摘要本文主要针对CT系统进行研究与分析,根据附件中的信息对CT系统进行参数标定,并在此基础上,结合附件资料建立相关模型求解出所测介质的相关信息。
对于问题一,首先对附件二数据进行二值化处理并进行统计分析,判断得出X射线的180个方向信息。
选取最大目标值对能量的最大吸收量进行统计,分析得出测量过程中占据最大探测单元数的测量角度。
得到已知长度所对应的探测单元数,并对探测单元间距进行计算。
利用质心法,建立中心位置几何模型和旋转中心位置质心法模型对CT系统旋转中心位置进行求解,并对所得结果进行误差分析,验证模型可靠性。
对于问题二,经过对附件二中的信息进行验证分析,发现旋转中心的偏移对图像的重建影响较大。
为得到较准确的重建图像,应用CT系统旋转中心偏移校正原理对附件三的信息进行处理,得到一个新的数据信息。
在新的数据信息的基础上,利用代数迭代重建方法,建立射线的能量吸收模型,重复迭代,即可求出每个像素的吸收率。
再利用Radon逆变换原理,根据各像素吸收率,重建出原图像,进而求出各个位置的吸收率。
对于问题三,根据问题一已求解出来的标定参数,运用图像偏差校正法对附件五中数据进行校正。
运用Radon逆变换图像重建模型对校正后数据进行图像重建。
得出该未知介质在正方形托盘中的位置、几何形状和吸收率等信息。
对图像进行二值化处理,求解出10个位置的实际坐标。
根据未知介质实际坐标,建立像素中心点提取模型,求出10个位置处的吸收率。
对于问题四,首先对问题一中的标定参量进行误差分析,以偏差(Bias)和均方根误差(RMS)作为精度评定标准,分别对旋转中心,探测器单元距离和CT 系统方向进行评定,求出参数标定精度,并分析其稳定性。
建立一个新模板,利用问题一模型,进行参数标定。
并对所求参数与已知参数做精度与稳定性分析。
为解决图像重建的问题,也可以建立卷积反投影模型,采用最小二乘法对CT系统的标定参数的最优解进行计算。
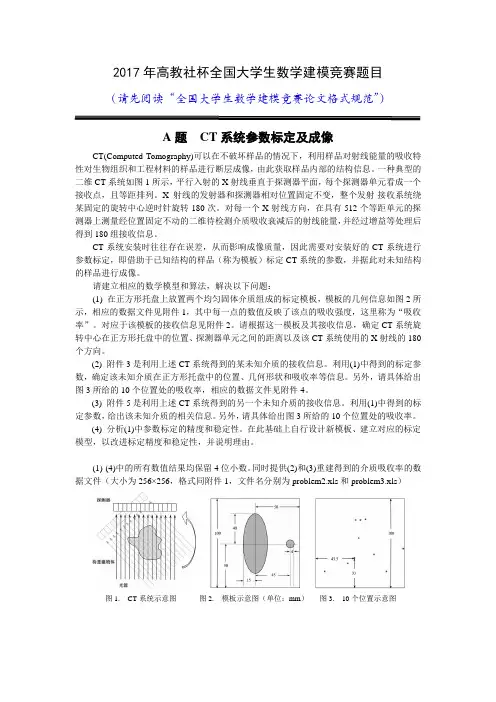
2017年高教社杯全国大学生数学建模竞赛题目(请先阅读“全国大学生数学建模竞赛论文格式规范”)A题CT系统参数标定及成像CT(Computed Tomography)可以在不破坏样品的情况下,利用样品对射线能量的吸收特性对生物组织和工程材料的样品进行断层成像,由此获取样品内部的结构信息。
一种典型的二维CT系统如图1所示,平行入射的X射线垂直于探测器平面,每个探测器单元看成一个接收点,且等距排列。
X射线的发射器和探测器相对位置固定不变,整个发射-接收系统绕某固定的旋转中心逆时针旋转180次。
对每一个X射线方向,在具有512个等距单元的探测器上测量经位置固定不动的二维待检测介质吸收衰减后的射线能量,并经过增益等处理后得到180组接收信息。
CT系统安装时往往存在误差,从而影响成像质量,因此需要对安装好的CT系统进行参数标定,即借助于已知结构的样品(称为模板)标定CT系统的参数,并据此对未知结构的样品进行成像。
请建立相应的数学模型和算法,解决以下问题:(1) 在正方形托盘上放置两个均匀固体介质组成的标定模板,模板的几何信息如图2所示,相应的数据文件见附件1,其中每一点的数值反映了该点的吸收强度,这里称为“吸收率”。
对应于该模板的接收信息见附件2。
请根据这一模板及其接收信息,确定CT系统旋转中心在正方形托盘中的位置、探测器单元之间的距离以及该CT系统使用的X射线的180个方向。
(2) 附件3是利用上述CT系统得到的某未知介质的接收信息。
利用(1)中得到的标定参数,确定该未知介质在正方形托盘中的位置、几何形状和吸收率等信息。
另外,请具体给出图3所给的10个位置处的吸收率,相应的数据文件见附件4。
(3) 附件5是利用上述CT系统得到的另一个未知介质的接收信息。
利用(1)中得到的标定参数,给出该未知介质的相关信息。
另外,请具体给出图3所给的10个位置处的吸收率。
(4) 分析(1)中参数标定的精度和稳定性。
在此基础上自行设计新模板、建立对应的标定模型,以改进标定精度和稳定性,并说明理由。
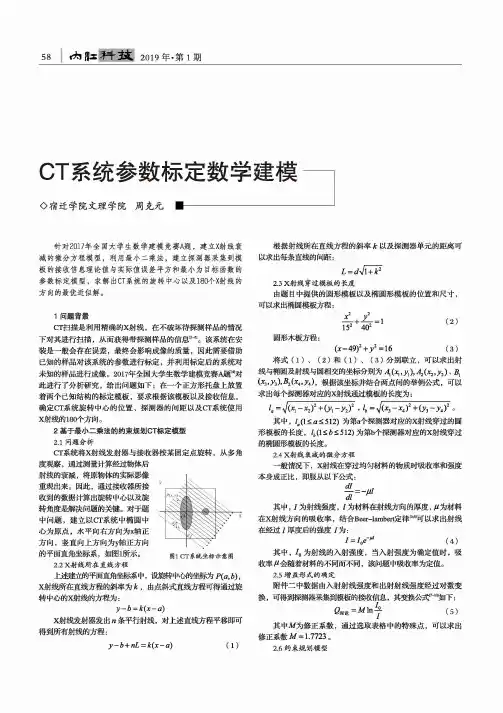
58 為紅科技2019年•第1期CT系统参数标定数学建模◊宿迁学院文理学院周克元■------------------------针对2017年全国大学生数学建模竞赛A题,建立X射线衰 减的微分方程模型,利用最小二乘法,建立探测器采集到模 板的接收信息理论值与实际值误差平方和最小为目标函数的 参数标定模型,求解出CT系统的旋转中心以及180个X射线的 方向的最优近似解。
1问题背景C T fi描是利用精确的X射线,在不破坏待探测样品的情况 下对其进行扫描,从而获得带探测样品的信息[1_3]。
该系统在安 装是一般会存在误差,最终会影响成像的质量,因此需要借助 已知的样品对该系统的参数进行标定,并利用标定后的系统对 未知的样品进行成像。
2017年全国大学生数学建模竞赛AM™对 此进行了分析研究,给出问题如下:在一个正方形托盘上放置 着两个已知结构的标定模板,要求根据该模板以及接收信息,确定CT系统旋转中心的位置、探测器的间距以及CT系统使用 X射线的180个方向。
2基于最小二乘法的约束规划CT标定模型2.1问题分析CT系统将X射线发射器与接收器按某固定点旋转,从多角 度观察,酣测量计算经过物体后射线的衰减,将原物体的实际影像重现出来。
因此,通过接收器所接收到的数据计算出旋转中心以及旋转角度是解决问题的关键。
对于题中问题,建立以CT系统中椭圆中心为原点,水平向右方向为x轴正方向,竖直向上方向为y轴正方向的平面直角坐标系,如图1所示。
2.2 X射线所在直线方程的平面直角坐标系中,设滕t中心的坐标为P(a,6), X射线所在直线方程的斜率为由点斜式直线方程可得通过旋 转中心的X射线的方程为:y — b=k(x -a)X射线发射器发出》条平行射线,对上述直线方程平移即可 得到所有射线的方程:y-b +nL =k{x -a)(1)根据射线所在直线方程的斜率以及探测器单元的距离可 以求出每条直线的间距:L =d^l +k22.3 X射线穿过模板的长度由题目中提供的圆形模板以及椭圆形模板的位置和尺寸,可以求出椭圆模板方程:^+^=1(2)圆形木板方程:(x-49)2+/=16(3)将式(1)、(2)和(1)、(3)分别联立,可以求出射 线与椭圆及射线与圆相交的坐标分别为為(x2,j/2)、马〇c3,j3),52(x4,>»4),根据该坐标并结合两点间的举例公式,可以 求出每个探测器对应的X射线通过模板的长度为:la=^(xi-x2)2+(y i-y i)2,L=h)2+(y3_y J2 〇其中,512)为第a个探测器对应的X射线穿过的圆 形模板的长度,/6(1S W512)为第b个探测器对应的X射线穿过 的椭圆形模板的长度。
CT系统参数标定及成像模型摘要本文在CT工作原理的基础上通过建立参数标定及成像模型,实现了对安装好的CT系统标定参数,以及对未知结构的样品进行成像。
首先,根据尺寸、位置已知的模板的吸收率数据确定其材料的均匀性。
将已知的吸收率和吸收信息代入Lambert-Beers吸收定律,可建立吸收信息与被测物体厚度的函数关系。
另外,吸收信息中非零值越多,则单元数越多,投影越长,物体宽度越大。
由此可用物体尺寸求得探测器单元间距。
筛选数据得到模板的最长和最短投影,利用模板在探测器的投影位置找到二者的几何关系,可解出旋转中心的坐标。
最后利用一定次数旋转的角度和旋转次数作商,可求得每次旋转的角度,结合初始角,可知X射线的180个方向。
然后,因为衰减系数在不均匀介质中会随着位置而变化,沿照射路径作线积分即为接收信息。
该过程与投影过程类似,因此运用直接傅里叶反变换法反解出衰减系数。
因图像较大,可调用imresize函数缩放。
附件3物体形状较为规则,可当作椭圆处理。
由正方形托盘和该物体的几何关系可求出位置。
将图形拆分开后,分别采用多项式拟合、幂指数拟合,以此描述形状。
吸收率和衰减系数有比例关系,可由模板求得,带入被测件的衰减系数即可知其吸收率。
通过坐标变换,将10个点的位置解出,则可知吸收率。
目录CT系统参数标定及成像模型 (1)摘要 (1)一、问题重述 (3)二、问题分析 (3)2.1系统参数标定模型 (3)2.2成像模型 (3)2.3精度和稳定性分析 (4)三、模型假设 (4)四、定义与符号说明 (4)五、模型的建立与求解 (5)5.1 CT系统参数标定模型 (5)5.1.1吸收率与接收信息 (5)5.1.2探测器单元之间的距离 (6)5.1.3 CT系统旋转中心在正方形托盘中的位置 (6)5.1.4 X射线的180个方向 (7)5.2 CT系统成像模型 (8)5.2.1直接傅里叶反变换法(DFR)求衰减系数μ (8)5.2.2位置和几何形状 (9)5.2.3吸收率 (12)5.2.4十个位置处的吸收率 (14)六、模型评价 (16)七、总结 (18)八、参考文献 (18)九、附录 (19)一、问题重述CT技术通过X射线穿过被检测物体产生衰减的原理,能够在不破坏物体内部结构的前提下,对被扫描物体进行可视化成像[1]。
CT系统参数标定及成像作者:潘云龙,隋立洋,吴润晨来源:《黑龙江工业学院学报(综合版)》 2018年第3期摘要:借2017年全国大学生数学建模竞赛A题目的背景,用数学上的方法展开对模型的建立与优化。
考虑到CT机器内部的结构越来越复杂,人们即便能够熟练掌握各机器的操作与使用,但对于其成像原理和数据的处理也并不清楚。
故对最基本的CT系统的成像原理和数据处理进行简单的分析。
基于二维CT系统,研究分析其成像原理,对其误差以及精准性进行改进,使成像模型更加优化。
关键词:CT系统;成像原理;数据处理;理想化模型;矩阵转换中图分类号:TP391.41文献标识码:A1CT成像系统问题重述1.1背景介绍当今社会,随着科学技术不断深入发展,CT成像系统的应用已遍布各大社科领域,带来的影响也逐渐改善人类生活。
CT的原理就是在不破坏样品的情况下,在不同断面上,接收由不同角度发射的穿过物体后衰减的射线,进行数据分析后建立物体影像,最终获取样品内部的结构信息。
但由于CT系统的安装往往存在误差,对所建物体影像质量有所影响,因此成像时需对参数进行确定。
1.2提出问题获取接受信息后,由于探测器具有不同的旋转角度,180个角度下512个探测器接收信号所成的图像关系如何?模板接受信息与介质吸收率的数学转换模型是什么?对于均匀介质模板与非均匀介质模板之间模型的改进应该如何进行?基于CT系统的自身误差,应该怎样排除其不稳定性?本文就上述问题进行研究,分析确定了数据转换模型及其优化方向。
1.3研究的意义对CT系统参数的确定及其误差分析是为了挺高其精确性与稳定性,CT成像系统的应用与我们的日常生活息息相关,尤其是在医学、工业、地理勘察等专业具有很大影响力。
因此,通过其成像原理对其研究,有利于制定更加合理有效的成像方案,从而实现标准化成像、扩大CT应用领域、改善人们生活条件等等目标。
1.4具体问题(1)问题一:根据已知模板及其接收信息与介质吸收率,计算发射-接收系统的旋转中心、探测器单元之间的距离以及该CT系统使用的X射线的180个方向;(2)问题二:根据问题一中所得参数,求解未知介质在正方形托盘中的位置、几何形状和吸收率等信息并给出具体十个位置的吸收率;(3)问题三:根据问题一中所得参数,求解另一未知介质在正方形托盘中的位置、几何形状和吸收率等信息并给出具体十个位置的吸收率;(4)问题四:分析问题一中参数的精度和稳定性,设计新模板,建立对应的标定模型,改进标定精度和稳定性,说明理由。
基于2017数学建模的滤波反投影算法应用作者:李春梅来源:《电子技术与软件工程》2018年第07期摘要 2017高教社杯全国大学生数学建模竞赛A题是关于CT系统参数标定及成像模型。
CT技术的核心是图像重建,在图像重建的过程中,建立基于radon变换的图像矩阵重建模型。
图像重建的核心是重建算法,在迭代法和解析法中,解析法具有更严谨的数学知识基础,处理速度快。
解析重建算法中,滤波反投影算法运算效率更高,图像重建的质量比较好,成本低。
【关键词】CT 重构 randon 变换滤波反投影1 CT图像重建原理的知识背景CT系统基本过程是:平行入射的X射线垂直于探测器平面发射,形成一个发射.接收CT 系统,每个探测器单元都看做是一个接收点,且间隔距离相等。
计算机断层成像图像重建的过程是按照一定的算法将已经检测到的投影数据进行数学运算,最终得到断层图像。
Radon变换及其逆变换:物体断层被射线扫描后需要用重建算法计算才能得到CT图像,图像重建的基础是Radon 变换及其逆变换。
假设每条射线相互平行,对于一个二维平面进行射线检测可得到一条投影数据,该投影数据称为二维平面的一个Radon变换;如果检测中该平面旋转180度,同时将对应的投影数据进行组合,则得到类似正弦分布形式的图像,从正弦图获取二维平面图像的变换称为Radon反演。
用公式可分别描述为:Rf(θ,f)=(t cosθ +s sinθ,tsinθ-s sinθ)ds,由于matlab中封装有radon函数,使用时直接调用函数:R=radon(I,theta)。
2 滤波反投影算法3 滤波反投影算法的应用为了标定radon反演重建结果在正方形托盘中的位置,我们需要确定x-射线开始照射时刻的角度,如图1所示。
3.1 反演图像矩阵在正方形托盘中的位置为了转换后矩阵与托盘位置对应,建立相对距离比例模型,寻找对应在正方形托盘位置各数值在装换后矩阵Mimg中的位置。
正方形托盘的边长分别为100mm,垂直托盘照射时需要的探测器单元个数为:将附件3数据进行iradon反演,通过矩阵非0点开始和结束位置的判断并得出的256*256大小的介质吸收率的数据。
基于RADON逆变换对CT系统参数标定及成像分析方梓涵;张焕明;朱家明【摘要】针对CT系统参数标定及成像,运用了Radon逆变换、微分方程及改良的遗传算法等理论,构建了正弦图求解距离及角度、基于遗传算法的旋转中心位置及基于衰减原理的定点吸收率、精读及稳定性分析等模型,综合运用了MAT-LAB、EXCEL及C++等软件编程求解,得出了CT系统旋转中心位置、探测器单元之间的距离及入射角度、未知介质几何形状和吸收率等物理信息等结论.最后设计新模板,给出改进CT系统标定精度和稳定性的相关可行方案.【期刊名称】《哈尔滨师范大学自然科学学报》【年(卷),期】2018(034)002【总页数】5页(P21-25)【关键词】CT成像;RADON逆变换;衰减原理;遗传算法【作者】方梓涵;张焕明;朱家明【作者单位】安徽财经大学;安徽财经大学;安徽财经大学【正文语种】中文【中图分类】O231.50 引言计算机断层成像技术是当今最先进的成像技术之一,凭借其非接触性、无破坏性、高分辨率、无影像重叠等优点成为临床医学、工业、材料、生物等领域中不可或缺的重要技术.由于CT成像技术的迅速发展,在医疗诊断中起到了举足轻重的作用,然而随着X射线剂量增加,使CT成像更清晰的同时也会为病人带来严重的潜在风险.因此,对CT系统参数标定及成像加以研究,对图像局部快速重建意义重大.利用标定模板及所给标定参数以确定未知介质的有关信息,既能改进CT成像技术的精度及稳定性,又能对图像局部快速重建起到重大意义[1].1 数据来源与模型假设该文数据来源于2017年全国大学生数学建模竞赛A题.为了便于解决问题,提出以下假设:(1)假设在随着转盘转动过程中,探测器始终垂直于固定转盘;(2)将标定模板的质心看作质点;(3)假设探测器在转动过程中,椭球体与两个球体始终保持相对静止;(4)假设忽略光的衍射现象,假定光束波动不明显.2 RADON变换成像分析体系2.1 研究思路该题需要研究的问题是借助于模板标定CT系统的参数,并据此对未知的样品进行成像,针对此问题,分为三个小问题来研究,第一,利用excel中的色阶功能调出投影的灰度图像,根据圆的对称性求解出单元间的距离,灵活运用坐标变换和遗传算法求出入射方向.第二,利用已知参数,运用MATLAB反求解物体的位置信息及各点吸收率大小.第三,分析参数的精度和稳定性,对模型进行灵敏度分析,并改进原模型.2.2 指标设计将问题划分为两个步骤来解决:一是利用正弦图求解探测器单元距离及每次旋转的角度.用MATLAB灰度图像绘图处理附件二的数据得到圆形和椭圆形正弦投影图,通过笛卡尔直角坐标系,整理出每列的丝带状阴影长度求平均值即为单元距离;模板向平面上任何一组斜率相同的直线上投影,根据其投影长度与标准角度-阴影比关系,近似得出每一列数据所对应的偏角,即为每次旋转的角度.二是基于遗传算法求出系统旋转中心位置.由于离散数据的误差,180条直线组合将产生个交点,依据旋转点和角度与已知数据之间的映射关系构建方程组,以旋转中心与其余点欧氏距离为目标函数,利用MATLAB遗传算法求解非线性规划问题从而确定探测器旋转中心.2.3 评价指标体系结果分析根据建立评价指标体系的基本原则和选择方法,提出了上述指标体系.该体系以RANDON变换为基础,通过构建笛卡尔坐标系并利用MATLAB灰度图像处理从而得到旋转中心.3 基于RANDON逆变换成像系统的实证分析3.1 研究思路首先利用excel的色阶功能绘出物体大致的灰度图像,通过重新建立坐标系,然后运用遗传算法,以旋转中心与各点的欧氏距离之和为目标函数,建立非线性规划问题,最终求得180次的入射方向.3.2 基于衰减原理的定点吸收率模型平行光源在穿过均匀材料的物质时,其强度的衰减率与强度本身成正比[8],即:其中,I为射线强度,μ为物质对射线的衰减系数,即为吸收率,l为物质在射线方向的厚度,对等式两端同时求积分得:I=I0e-μlI0为入射强度,假设当平行光源的能量一定时,吸收率μ在同一介质中保持不变.当平行光源穿过各处密度不同的非均匀物体,经过某处断面时,当射线沿xy平面内直线L穿行时,上式变为:其中是μ(x,y)沿L的线积分,因此:其中可从CT的X光管和探测器的测量数据中得到.X射线衰减公式为:其中,I为射线强度,μ为物质对射线的衰减系数,l为物质在射线方向的厚度.由衰减公式可知衰减率与路程成正比.(1)确立平面内任意点投影数值总和平面中每点的衰减系数均不相同,设S平面内点i的衰减系数为μi(i∈S).A点在n次系统旋转—扫描过程中的投影点数值之和为SA:(2)确定平面内任意点的定量吸收强度表1是利用上述CT系统得到的某未知介质的接收信息,为一个512×180的矩阵,列举其中的一部分.记其中任意点P为(x,y),过P点做第n次扫描接收器的垂线,垂足Hp为(dn,n)(n=1,2,…,180).(i)平面内所有点吸收率之和为S:(ii)平面内任意两点A、B吸收率之差:SA-SB=179(μA-μB)其中,SA、SB分别为A、B点在180次旋转中的投影点数值之和,μA、μB为A、B点的衰减系数.(iii)计算P点吸收率:其中μHP为P点垂足的衰减系数,S为平面内所有点吸收率之和.3.3 实证分析算出十个具体位置如图1所示吸收率,见表2.运用MATLAB软件编程,得到位置物体的中心位置坐标为(205,210.5),椭圆长轴一端端点坐标为(292,91),未知介质的几何形状即如图2所示为一个大椭圆物体和靠近其端点的两个小椭圆.图1 十点坐标图表1 未知介质的吸收信息序号旋转角度序号旋转角度序号旋转角度序号旋转角度序号旋转角度129.8733765.53273101.714109137.867145173.998231.1413866.68474102.801110138.535146174.924331.4593967.28175104.7461 11139.866147176.047432.4084068.52376104.746112140.5221481 76.047533.684169.16977105.631113141.503149177.637634.635 4270.5278106.47114142.802150177.637735.5934371.22979108.037115143.444151177.637836.5564472.73180108.771116144.727 152177.637937.5214573.5381109.48117145.686153177.6371038.8234674.36982110.166118146.64154177.6371139.8054775.254 83112.107119147.909155183.9531240.4674877.19984112.719120 148.541156185.0761341.4654978.28685113.897121149.81157186.0021442.4735078.28686114.468122150.763158186.8091543.83 25179.48887116.112123151.721159187.539表2 未知介质在十个点的吸收率点序12345678910横坐标1034.543.54548.5505665.579.598.5纵坐标18253375.555.575.576.5371843.5吸收率01.000901.18591.05911.32871.288000将表1中的数据代入MATLAB计算每点吸收率,将图像二值化如图3所示.从图3可以获知该介质的中心位置坐标为(205,210.5),椭圆长轴一端端点坐标为(292,91),未知介质的几何形状即如图2所示为一个大椭圆物体和靠近其端点的两个小椭圆.根据基于衰减原理的定点吸收率模型,结合原始竞赛数据,利用MATLAB可以画出图3,从图3可知,介质并不为均匀物体,各点吸收率不尽相同.图2 未知介质二维变化示意图图3 未知介质吸收强度图像4 基于RANDON变换的计算误差模型4.1 研究思路为了更好的测量探测单元长度,将新模板定义为在原模板基础上将椭圆删去增加同心圆(黑色部分为空),由光学知识可知通过不同方向的投影,圆的所吸收的X光对应探测单元的数量保持不变,通过180次角度圆在感应器上的对应长度多次加权平均的方法来减小测量探测单元间距的误差,并计算3次圆形对应投的感应器数量在180次角度序列下的结果来提高计算的样本容量,提高精度,增加稳定性.其对应的投影图像如图4所示.图4 改进模型的示意图4.2 数据处理(1)CT重建的数学基础是Radon变换,二维变换的定义为:其中f (x,y)为待重建物体的函数,Rf (s,θ)为f (x,y)沿直线L的投影,s为原点O到直线L的距离.(2)设物体的质心为则有:令对一固定视角θ,记p(s,θ)=pθ(s),可证设pθ(s)的质心为点Cp,其在s轴上的坐标为则有:由于则(3)坐标系变换由于坐标系sOt与xOy的变换关系为s=xcosθ+ysinθ,t=-xsinθ+ycosθ,通过变换得:x=scosθ-tsinθ,y=ssinθ+tcosθ(4)通过积分变量代换:当旋转中心由xOy坐标系转换到sOt坐标系时,设它们在探测器上的投影分别为Op与易知这样就将旋转中心的偏移量问题转换为求固定视角下的投影函数的质心问题.4.3 结果分析该文要求确定CT系统旋转中心在正方形托盘中的位置、探测器单元之间的距离以及该CT系统使用的X射线方向.首先,基于Radon逆变换用MATLAB灰度图像绘图,建立笛卡尔直角坐标系处理圆形和椭圆形正弦投影图,根据已知投影长度与标准角度-阴影比进行拟合,可得到接收器单元距离为0.2752及180次旋转的角度.运用遗传算法,以旋转中心与其余点欧氏距离为目标函数构建非线性规划方程,求解得旋转中心位置坐标为(59.29,43.75).同时,利用标定参数确定中未知介质位置、几何形状和吸收率等信息.首先,基于微分方程原理建立了基于X射线衰减原理的定点吸收率模型,定量表示平面内任意点吸收强度.利用MATLAB软件求解,对图像进行重建确定其几何形状为一个大椭圆物体和靠近其端点的两个小椭圆,中心位置坐标为(205,210.5),介质在图1给定的十个点的吸收率依次为0、1.0009、0、1.1859、1.0591、1.3287、1.288、0、0、0.分析问题一求得的参数标定的精度和稳定性并对现有模型进行改进.首先,运用了光学知识进行分析,根据部分投影的二维CT旋转中心偏移矫正模型来计量旋转中心的误差和构建了新的同心圆模板模型.其次,运用MATLAB软件拟合投影正弦图,据此计算二维CT的几何参数,并说明了模型改进的效果.该文为进一步增加标定参数精读和稳定性,运用CANNY算法对模型加以改进;恰当地对模型进行了评价;从地震同相轴识别和波场分离、解决物流车辆调度问题和建模方法方面对模型进行了推广.该文思路分析清晰,切入点独特,分析较为全面,软件运算得当.5 总结该文巧妙地运用流程图,将建模思路完整清晰的展现出来;Randon逆变换可以用投影数据来重建原始密度,Radon变化后的数据也成正弦图.利用投影正弦图求解模板单元距离及转动角度这一模型,可应用于地震资料处理中,对地震同相轴识别、波场分离、压制多次波、速度分析等方面具产生应用效果.基于遗传算法,利用求解最小欧氏距离确定旋转中心位置.该模型结合VRP(Vehicle Routing Problem)问题模型,把遗传算法引入到解决物流车辆调度问题将帮助解决车辆的调度与管理;也可以用于加工过程的执行时间优化问题,具有计算速度较快的特点,适用于较大规模作业车间调度问题的求解.参考文献【相关文献】[1] 李翰威. 锥形束CT系统几何伪影校正技术研究 [D].南方医科大学,2015.[2] Webb S.Historical experiment predating commercially available computed tomography[J].Br J Tad,1992(65):835-837.[3] 齐宏亮. 稀疏角度下的CT图像重建迭代算法研究 [D].南方医科大学,2013.[4] 李艳良,薛鲁燕,王东兴. 扇形阵列结构光源位置探测器 [J]. 自动化应用,2014(01):76-77.[5] 魏德强,信卫坡,王荣. 电子束扫描对铝合金表面强化层的影响 [J]. 机械工程学报,2010,46(16):125-130.[6] 李静.二维Radon变换在图像重建中的重要性质及定理 [J]. 河南教育学院学报:自然科学版,2015,24(4):21-23.[7] 朱家明,关珊,蒋萌萌.宏观经济与短期电力负荷的联动关系分析 [J].长春工业大学学报,2017,38(3):289-293.[8] 郑旭浩. 遗传算法原理在机械工程中的应用 [J]. 中国高新技术企业,2014(34):62-63.[9] 姜启源,谢金星,叶俊.数学模型 [M].北京:高等教育出版社,2011.[10] 朱家明,邵笑,施展,等.我国区域能源消耗及可持续发展的研究 [J].宝鸡文理学院学报:社会科学版,2015,35(5):55-60.。
CT 系统参数标定及成像摘要CT (Computed Tomography )可在不破坏样品的情况下利用样品对射线能量的吸收特性对生物组织和工程材料样品进行断层成像,获取样品内部的结构信息。
针对问题一,首先将附件1模板的几何信息数据及附件2中模板的接收信息利用MATLAB 软件进行处理,通过Radon 变换及基于傅里叶变换的中心切片定理进行X 射线CT 系统的二维重建;其次根据重建的二维图像,找出旋转中心与几何中心之间的距离关系,利用MATLAB 编程求出旋转中心与几何中心的距离10.8003m ,旋转中心的坐标00(,)x y 为(9.2734,5.5363) ;然后将求探测器单元之间的距离问题转化为求小圆的模板直径长度与小圆直径所占探测器的个数之比,得出探测器单元之间的距离为0.2667d,对该问题进行模型改进后,求得10.2768d ,为最优解;最后通过投影最宽与最窄的位置之间的关系,解出每个旋转方向的角度为0.9783 ,180个方向起始点为-56.74°,终止点为119.35°。
针对问题二及问题三,通过Radon 反变换,利用MATLAB 将附件3及附件5的不同未知介质的接收信息进行处理,分别得到两介质各自在正方形托盘的位置图像。
由图以及第一问,知未知介质的初始位置均偏离几何中心,对其校正使其旋转中心与几何中心重合,利用MATLAB 软件编程,得到某未知介质的吸收率三维图像。
通过取边界点求标准方程法确认问题二中的未知介质形状为椭圆;问题三中的图像明显为不规则图形。
最后将附件4的十个位置坐标带入各自的程序中,用MATLAB 求出了问题二、问题三中给定的十个位置的吸收率k 。
针对问题四,依据对问题一中模板的精度及稳定性分析,重建长方形模板,使CT 系统的旋转中心与托盘的几何中心重合,观察放射角度与投影长度的关系,最终整理出的图像数据与实际探测数据基本吻合,说明其精确度较高,从图像显示出的线性关系也证明了重建模板的良好稳定性。
2017数学建模a题论文数学建模是数学学习的一种新的方式,它为学生提供了自主学习的空间,有助于学生体验数学在解决实际问题中的价值和作用。
下文是店铺为大家搜集整理的关于2017数学建模a题论文的内容,欢迎大家阅读参考!2017数学建模a题论文篇1浅谈初中数学建模教学摘要:数学建模理念已越来越受到数学教学一线老师的青睐,它的重要意义以及模型在学生学习数学过程中已倍受关注,更引起了教师探索的兴趣。
结合平时的教学实践,从初中数学教学的各种不同方式来论述怎样培养学生数学建模能力。
关键词:数学建模教学意义模型方式随着数学教育界中数学建模理念地不断深化,提高数学建模教学势在必行。
通过数学建模能力的培养,既能使学生可以从熟悉的情境中引入数学问题,拉近数学与生活、生产的联系,激发学生学习数学的兴趣,又能培养学生的数学应用意识;既能使学生掌握学习数学的方法又能培养学生的创新意识以及分析和解决实际问题的能力,使“人人学有价值的数学”。
这正是新课程改革和数学教育的目的。
一、初中数学建模教学的重要意义1、激发学生学习数学的兴趣数学建模是数学学习的一种新的方式,它为学生提供了自主学习的空间,有助于学生体验数学在解决实际问题中的价值和作用,体验数学与日常生活和其他学科的联系,体验综合运用知识和方法解决实际问题的过程,增强应用意识,总之,它拉近了学生与日常喜闻乐见的生活的距离,又因为它具有应用价值,显而易见有助于激发学生学习数学的兴趣。
2、培养学生的应用意识和创新意识通过数学建模教学,既可以培养学生的数学应用意识、巩固学生的数学方法,又可以培养学生的创新意识以及分析和解决实际问题的能力。
3、数学建模教学改善了教和学的方式数学建模学习成为再发现、再创造的过程,教学过程由以教为主转变为以学为主,支持学生大胆提出各种突破常规,超越习惯的想法,充分肯定学生的正确的、独特的见解,珍惜了学生的创新成果和失败价值,使他们保持敢于作出各种新颖、大胆尝试的热情。
1问题背景及数据来源当今社会,CT 技术广泛的应用于多个领域。
CT 系统的工作原理见图1。
此系统可以在不破坏测试材料的前提下,利用材料可以吸收射线能量的特性,在不同角度下对生物组织等样品,进行射线投影,从多角度观察,获取其横截面信息,通过不同测试材料的断层进行成像,从而判别分析样品内部的结构信息。
本文主要借助2017年全国大学生数学建模比赛A 题所给数据,建立相应的数学模型和算法,得到CT 系统的标定参数,并对未知结构的样品进行成像及分析。
2模型假设①投影间距最大的为垂直照射,最小的为平行照射。
②平行光束旋转近似看做扇形扫描。
3模型的建立3.1RADOM 函数模型的建立Radom 算法是将数字矩阵做投影变换,把未知介质组成设置标定模板。
将给出的数据进行投影变换,运用CT 系统图像重建原理把未知介质进行线性衰减分析。
CT 图像重建上任意一点的灰度值为f (x ,y ),中心对应坐标系的原点,重建区域外灰度值为0。
即满足:(1)式中R 表示重建区域半径;任意一点(x ,y )的灰度值正比于该点的线性衰减系数。
计算线性衰减系数分布μ(x ,y )最直接的方法就是求解方程组,如图1所示,假定3×3的单元构成切片,各单元的线性衰减系数分别为μij ,三条射线对应的线性衰减系数之和为ρij ,由此建立9个独立方程,见公式(2)。
把衰减系数的分布用Matlab 图像的形式显示,就得到该切片的重建图像。
间距为1个像素的平行光穿过图像,则Radom 变换计算穿过图像长度上的积分,即:式中为旋转角度θ的平行光束。
(2)为了获得N ×N 像素的图像,可以通过构建N ×N 个方程组,解方程方能求出线性衰减系数的二维分布。
3.2旋转中心位置及旋转角度的确定根据附件一中的数据,运用MATLAB 进行分析,我们可以得到二维的介质的形状位置图,可以推出未知介质在三维下的图像如图2。
依据数据表,构建EXCEL 缩略拼接图,可得出样品经过扫描后的大致轨迹。
CT系统参数校准与成像金佳鸿;张书华;廖高华;罗良【摘要】CT 系统在安装时存在旋转中心与旋转角度不准确的问题, 这将大大影响成像质量. 本文采用椭圆与圆形两个均匀介质对 CT 系统进行校准, 通过理论分析给出旋转角度与旋转中心的校准公式以及成像方法, 并通过实际数据对其进行验证, 结果表明本文提出的校准公式与成像方法高效可靠, 可用于CT系统.%CT system has the problem of inaccurate rotation center and rotation angle when it is installed, which will greatly affect the imaging quality. Based on the elliptical and circular two homogeneous medium to CT system calibration, through the theoretical analysis the calibration formulas of the rotation angle and the rotation center and the imaging methods are obtained. The practical results show that the proposed calibration formula and imaging method is efficient, reliable and can be used in CT system.【期刊名称】《湖南理工学院学报(自然科学版)》【年(卷),期】2018(031)002【总页数】4页(P14-17)【关键词】CT系统;图像重建;坐标变换;拉东变换【作者】金佳鸿;张书华;廖高华;罗良【作者单位】湖南理工学院物理与电子科学学院, 湖南岳阳 414006;湖南理工学院物理与电子科学学院, 湖南岳阳 414006;湖南理工学院物理与电子科学学院, 湖南岳阳 414006;湖南理工学院物理与电子科学学院, 湖南岳阳 414006【正文语种】中文【中图分类】TH7740 引言CT(Computed Tomography), 即电子计算机断层扫描, 利用样品对X射线能量的吸收特性对生物组织和工程材料的样品进行断层成像,可以在不破坏样品的情况下获取样品内部结构信息[1]. 常用的一种CT系统采用平行入射的X射线照射样品, 样品后方的X射线探测器接受待检测介质吸收衰减后的 X射线能量(图1). 探测器平面垂直于射线方向, 每个探测器单元看成一个接收点且等距排列. CT系统工作时, X射线发射器和探测器绕某固定的旋转中心逆时针旋转180次, 同时保持相对位置固定不变, 探测器可接收到180组不同方向并经过增益处理后的二维待检测介质信号.CT系统在安装时会存在误差, 主要是旋转角度与旋转中心不准确的问题, 这会极大影响成像质量[2].因此, 对安装好的 CT系统需要进行参数校准, 才能对未知结构的样品进行高质量成像. 本文主要研究如图1所示CT系统参数校准和成像问题.图1 CT系统示意图1 CT校准模型为校准CT系统, 在已知参数的正方形托盘上放置椭圆和圆形两个均质物品(图2), X 射线绕旋转中心逆时针旋转扫描 180次, 可获得经过椭圆和圆形两个均质物品吸收后的信号强度数据. 根据比尔定律[3],一束平行单色射线垂直通过某一均匀非散射的物质时, 其吸收度与物质的吸收率及吸收层厚度成正比.在该校准模型中, 探测器接受到X射线强度与不同方向下X射线所穿透的物质厚度成反比. 根据探测器采集的 180组信号强度信息, 对比椭圆和圆形均质物品尺寸与位置等几何信息, 即可获取安装好的 CT系统扫描所使用的180个方向与旋转中心坐标.1.1 CT系统所使用的180个方向椭圆均质物体在不同角度下投影长度有所不同, 因此可以分析椭圆的吸收数据获取投影长度, 进而判断每次X射线照射所使用的方向. 投影数据分为椭圆与圆分离或者椭圆完全遮挡圆两种情况. 图3展示了椭圆完全遮挡圆形物体时的情形, 得到图2 模板示意图其中θ定义为X射线方向与x轴正向夹角.图4展示了圆形未被椭圆完全遮挡的情形, 根据几何分析, 其角度与投影长度关系为其中45mm为椭圆中心到圆中心距离, 4mm为圆半径. L1 , L 2 , L3定义见图4.图3 椭圆投影长度示意图图4 椭圆与圆重叠投影示意图根据公式(1)和(2)分析探测器接受到的吸收强度数据, 则可计算出安装后CT系统实际采用的180个扫描角度.1.2 旋转中心位置在不同角度扫描时, 过椭圆中心的X射线总是对应最大的吸收强度, 因此分析吸收强度数据, 可方便获取椭圆中心在探测器上的投影位置. 以旋转中心为坐标原点, 椭圆中心位置在以X射线方向为x轴的坐标系中不断变化, 如图5所示, 结合坐标平移, 可得到图5 坐标旋转变换示意图其中X为椭圆中心在探测器上投影位置, Xc为旋转中心在探测器上的投影位置, xc、 yc为旋转中心在以正方形托盘中心为坐标原点的坐标系中的坐标.根据公式(3)和不同角度下椭圆中心和旋转中心在探测器投影位置变化情况, 即可拟合得出旋转中心位置坐标.1.3 成像算法对角度和旋转中心的坐标进行校准后, 利用不同角度下的吸收数据, 依据逆拉东变换进行反演成像.拉东变换[4]是奥地利数学家Rodon于1917年提出的, 是CT系统成像不可缺少的部分, 为图像重建提供了理论基础. 定义函数 f(x,y) 在平面上沿直线L的线积分为则 P f (L)为 f (x , y)的拉东变换. 取L倾斜角度为θ, s为点 Q (x , y)在L上投影距离, t为向量(x , y)在L上的投影长度, 则L可写成θ, s, t的参数方程形式:从而参数形式的拉东变换为固定角度θ, 对P f (t,θ) 做关于 t的一维傅里叶变换 F P(t), 发现其等于 f (x,y)的二维傅里叶变换Ff(t,θ) . 因此, 对于该实际问题, 只需要对吸收强度数据做傅里叶逆变换即可得到拉东变换的逆变换,即 f (x , y)的值, 亦即物体结构图.2 模型验证本文验证数据来自2017年全国大学生数学建模竞赛试题. 该数据包含有校准数据和未知介质数据. 针对校准数据, 采用我们建立的模型对其分析, 可得到标定参数. 根据得到的标定参数, 利用逆拉东变换对未知介质数据进行重构, 重构后对图形进行逆旋转、逆平移, 得到512×512像素图形. 此时托盘中心在像素图中心, 托盘边长为100mm, 对应像素点为 350, 所以对平移后的图片取中间350×350像素, 则此图对应托盘内像素分布, 再将350×350像素图像压缩为256×256大小. 又根据数据分析, 将像素值中小于0.1的部分归零, 得到最终像素优化图(图6). 该结果通过了评委们的审查, 证实了我们模型的有效性.图6 重构图像流程3 模型分析我们的模型能够较好地对CT系统进行标定以及重构, 但是也存在部分问题. 我们采用的椭圆投影长度来判断角度变化, 投影长度为将其对θ求导后可得投影长度随角度的变化率图7展示了投影长度随角度的变化率. 从图7中可以看出, 当X射线角度为0或者时, 椭圆在探测器上的投影长度变化率很小, 从初始数据中也可以看出, 角度标定为0或的数据有连续几个, 这将严重影响到我们对0和附近角度标定精度.此外, 我们假设探测器数据连续且探测器体积忽略, 因此, 探测器间距过大会导致探测长度结果可能会有1±的探测变化. 为了分析该模型的稳定性, 在计算角度时, 对投影长度做1±的随机改变, 发现所求的角度数据变化较大, 故而稳定性欠佳. 可通过增加探测器个数和减小探测器间距来改良精度. 对投影长度做1±的随机改变引起的前10个角度数据变化如图8所示, 可以发现角度变化不稳定.图7 椭圆投影长度随角度变化率图8 角度数据稳定性分析可采取的改进措施有:1) 采用高质量探测器, 尽量减小探测器间距.2) 改变物体在托盘上的位置. 由图7知, 当探测器角度为0或时, 投影长度变化率为零, 影响精度大小. 而当椭圆未全部遮挡圆时, 得到投影长度变化率随角度改变曲线如图9所示. 从图9中看出, 当角度为0时, 长度变化率不为0, 因此, 可以改变物体在托盘位置, 使入射角为 0时, 椭圆未全部遮挡圆, 从而增加投影长度的变化率, 提高精度.图9 两物体未完全遮挡投影长度随角度变化率4 总结与展望为解决典型 CT系统的校准与成像问题, 本文从理论分析出发, 建立了一个合理的模型, 可对安装后的 CT系统进行参数标定和成像. 该模型容易实现, 且运行速度快, 更重要的是能够重建出高质量的 CT图像. 该方法的不足之处是对原始数据要求较高, 不能根据已有数据, 拟合出缺失图像信息.参考文献【相关文献】[1] Mcnittgray M puted Tomography—An Increasing Source of Radiation Exposure—NEJM [J]. New England Journal of Medicine, 2007, 357(22): 2277~84[2] 郭立倩. CT系统标定与有限角度CT重建方法的研究[D]. 大连: 大连理工大学硕士学位论文, 2016[3] Ingle J D J, Crouch S R. Spectrochemical analysis[M]. PRENTICE_HALL, 1988[4] 梁国贤. CT图像的代数重建技术研究[D]. 广州: 华南理工大学硕士学位论文, 2013。
CT系统参数标定及成像摘要:本文运用MATLAB等工具对已给出的数据进行分析和处理,通过反射投影算法,等比例转换法,radon变换和iradon变换,还原180次扫描信息和图形信息。
对于问题1,通过radon变换法,在MATLAB中得出该介质以正方形托盘左上角为原点的坐标系下的位置分布图,然后根据题目中已经给出的介质物体实际图,以椭圆圆心为原点建立直角坐标系,得出两个坐标系之间的比例关系,通过位置与长度的等比例变换得出旋转中心在正方形托盘中的坐标为(-8.7755, 6.1697),通过观察附件2发现存在探测器接收到的非零信号个数稳定在28个,对比小圆的直径得出探测器的间距为0.2857mm,探测器接收到的非零信号个数与角度曲线没有发生突变,且最高点与最低点横坐标相差90次,可以认为每次旋转1度,初始位置与坐标系X轴正方向夹角为29度。
对于问题2,通过使用iradon变换,得出了投影重建结构的解,对附件3中某未知介质的投影数据进行滤波反投影重建运算,实现从其它空间向图像空间进行转换的过程,最终通过MATLAB运行结果获得该未知介质模型的重建图像,得出该未知介质在正方形托盘中的几何形状和位置信息,然后采用比例变换的方式,根据10个点的位置和相对于实物图位置,得出这10个位置介质点的吸收率结果。
对于问题3,采用与问题2相似的方式,利用MATLAB中的iradon算法,根据附件5中提供的另一未知介质的吸收信息,通过反投影重建可以得到该未知介质的位置,形状和吸收率等信息,同样采用等比例变换的方式,根据点的位置和相对于实物图的位置,得出这10个位置点的吸收率结果。
对于问题4,通过对已经给定的数据进行分析,用iradon验证扫描次数对成像质量的影响,在不同滤波环境下比较成像质量,分别对18,36,90,180个角度投影进行观察和分析,能够得出随着投影角度个数的增加,图像的重影越来越少,也即是稳定性和精确度越来越高。
运用shepp-lagon模型重新优化模型。
关键词:反射投影重建;MATLAB软件;radon变换;iradon变换;比例变换;成像质量;1.问题的重述:CT是一种利用样品对射线能量的吸收特性对生物组织和工程材料的样品进行进行断层成像的技术,由此可以获取样品的内部结构信息。
本次使用的二维CT 系统中平行入射的X射线垂直于探测器的平面,并且探测器单元可视为等距离排列的接收点,X射线的发射源和接收源的相对位置不变,整个系统绕着某个固定的旋转中心逆时针旋转180次,每个X射线方向,具有的512个等距离单位元探测器上测量经位置固定不动的二维待检测介质吸收衰减后的射线能量,并经过增益等处理后得到180组接收信息。
但是CT系统在安装时往往存在一定的误差而给测量质量带来一定的影响,本次借助于已知结构的样品标定CT系统的参数,题目要求建立相应的数学模型和算法解决以下四个问题:(1)根据正方形托盘上的两个均匀介质模板的几何信息以及其所反应的吸收率和接收信息,确定CT系统旋转中心在正方形托盘中的具体位置,探测器单元之间的距离以及该CT系统所使用的X射线的180个方向;(2)利用CT系统得到的某未知介质的接收信息以及1中的标定参数,确定未知介质在正方形托盘中的位置,几何形状和接收率,以及图3给定的10个位置处的吸收率;(3)利用CT系统得到的另一未知介质的接收信息以及1中得到的标定参数,确定该未知介质的信息,以及图3给定的10个未知处的吸收率;(4)分析1中参数标定的精度和稳定性,自行设计新模板、建立对应的标定模型,改进标定精度和稳定性,给出理由;2.问题的分析:CT技术是一种依据外部投影数据重建被探测物体的内部结构的无损检测技术,具有高精度,高效率,无损检测等优点,近年来被广泛应用于生物医学,航空航天,材料加工,组织探伤等领域,图像重建算法是CT技术的核心之一,重建算法的优劣直接影响了CT检测性能的好坏,而对于未进行图像校准的CT检测系统来说,确定其旋转中心和每次旋转的角度又极为重要,下边的几个问题就是解决CT旋转系统的中心,每次旋转的角度,通过建立CT成像算法,来进行模型检验和优化求解问题。
(1)对于问题1,通过对附件中所给出的相应数据进行分析,附件1中是将图2模板示意图利用建立二维坐标系,将原本连续的模板划分成独立的小单元,每个单元都能吸收X射线,我们可以把每个单元看成一个个像素,X射线从一个方向射向模板,,穿过模板后被探测器检测到,而每个探测器接收到的信号强弱各有不同,因此可以简单分析认为,探测器的信号和被接受的X射线经过模板的长度有关,CT围绕旋转中心旋转进行探测,每次旋转过一定的角度,而模板并不是一个完全对称的物体,在各个方向上的长度各有不同,X射线通过的长度不同,2中已经显示每次旋转得到的探测其能量和旋转角度关系,通过分析某一固定位置的探测器接收到不同能量的变换来求得每次旋转的角度,探测器的间隔可以根据模板的长度和探测到X射线能量变化的接收器个数来确定。
(2)对于问题2,需要使用在问题1中所求出的CT系统旋转中心在正方形托盘中的位置,以及探测器单元之间的距离和CT系统中X射线的方向这些结果,附件3给定了未知介质的接收信息数据,通过对其中的数据进行分析,使用与问题1互逆的方式,通过使用算法求出正方形托盘上未知介质的相对位置,几何形状和吸收率,另外还给出了正方形托盘中的10个点的位置,来得出这10个点的吸收率,在解决问题1时,是使用吸收率得到相对位置,因而求10个点的吸收率也是使用进行问题1的逆向求解过程。
(3)对于问题3,可以采用与问题2相似的方法,也是对问题1的过程进行逆向求解,从而得出该未知介质的相关信息,以及另外10个位置点的吸收率的大小。
(4)对于问题4,通过结合前面3个问题的结论与实现方法,自行设计一种模板和相应的模型,对于处于不同位置的介质点,其吸收率也会不尽相同,可以仿照附件1中的模板介质的吸收率和附件2与附件3的介质相关信息,先设定一组吸收率或者介质的相关信息,使用问题1的逆向求解过程,得出模板的位置和几何形状信息,并求出问题1和问题4中相应的参数标定误差和稳定性的大小。
3.模型的假设和符号的说明3.1模型的假设:(1)假设X射线穿过介质时,由于X射线与介质的原子相互作用过程中的散射,衍射等对X射线强度的衰减的影响可以忽略不计,也即是X射线衰减只与介质吸收有关;(2)假设整个CT发射-接收系统绕着旋转中心旋转的过程是匀速进行的;(3)假设入射的X射线的能量分布是均匀的,且每次发射源发射的X射线都是相同的;(4)假设介质是等密度分布的,单位质量介质中的电子数目相同;3.2 符号的说明符号说明表I入射光强d ij点i→j的距离I0出射光强λ两直角坐标系间的比例系数P探测器探测到的能量h(x,y)待变换目标函数μ衰减系数q傅立叶变换原函数Δl单位方格宽度w吸收强度f(x,y)衰减系数函数T灰度值n扫过圆的探测器个数βw与t间的比值p i第i个点的坐标4.模型的建立与求解:4.1问题1的模型建立与求解:4.1.1:求初始位置角度和探测器单元间距离:由朗伯比尔定律可知:用一束强度为I 0的x 光照射物体,如果物体内部均匀,已知物体对于x 光的衰减系数为μ,那么出射光强I 与入射光强I 0存在如下关系:I =I 0ⅇ−μc探测器探测到的能量:p =In (I 0∕I ),可知,p =−μc在沿某个方向入射的X 射线,探测器探测的能量与X 射线经过的物体的长度成正比。
f i 为x-y 平面的衰减系数函数,然后将物体划分成大小为∆l ×∆l 均匀的方格,使其离散化。
图4-1 朗伯比尔定律示意图 探测器接收到的能量p =∑f i ∆l=ln I0I ,当∆l 趋向于无穷小时,得到线积分p =∫f i dl针对假设,我们得知在某个方向上,p 可以看做在该方向上所有射线的投影集合,通过求解一定角度的p 来求解物体内部平面各点的衰减系数函数f(x,y)。
图4-2-1 模板示意图(单位:mm ) 图4-2-2 反射投影模板结构图· 利用MATLAB 绘制的附件中模板图中椭圆和圆的方程:椭圆方程为:x 2225+y 21600=1 圆方程为:(x −45)2+y 2=42选取椭圆短轴所在直线为x 轴,长轴所在直线方向为y 轴平行束反投影重建算法(Filter back projeCTion,abbr. FBP)傅立叶中心切片定理:假设f(x,y)是待重建物体的密度函数,p(t i ,α)为f(x,y)在角度α时的平行束投影,有傅立叶中心切片定理的数学表达式为:F I =F(ρ,α)F 1表示一维傅立叶变换F(ρ,α)是二维傅立叶变换的极坐标表示。
Radon 变换就是将数字图像矩阵在某以指定角度射线方向上做投影变换,例如,二维函数的投影就是在其指定方向上的线积分,在垂直方向上的线积分就是在x 轴上的投影;在水平方向上的二维线积分就是在y 轴上的投影。
设直角坐标系(x,y )转动α角后得到旋转坐标系(x ′,y ′),由此得知:x ′=xcosα+ysinαp(x ′,α)为原函数f(x ′,y ′)的投影f(x,y)沿着旋转坐标系中x ′轴α方向的线积分, 根据定义公式知其表达式为:p(x ′,α)=∬f (x,y )∞∞δ(xcosα+ysinα−x )dxdy, 其中0≤α≤π我们构建接收器接收到的信号和经过Radon变换得到的图形投影变换模型:P=-μ*p(x′,α)接收到衰减信号的接收器个数t(t i)正比于穿过图形的个数,如图所示:图4-3 接收到衰减信号的接收器个数从A题附件得知在DE列之后,图像分为两部分;分析可知,对于模型有一个椭圆和一个小圆,根据提出的模型,接收器接收到的信号p>0的区域也分为两个部分,因此,假设两者之间存在对应关系,选取从A列至FX列、从111行数据利用matlab统计存在p>0的个数,如图所示:图4-4 111行能接受到非零信号的探测器个数与转动次数示意图可知从DE列到最后72列探测器信号p>0的个数在一定范围内趋于一致,利用MATLAB求其平均值,n为个数,n̅=∑n i(p>0)求得n̅=28.8333,取整n̅=29,对应于小圆宽度为2*r=0.2857mmd=2∗rn̅−1对A题附件2进行n(p>0)统计,利用MATLAB得出如下图形:图4-5 能接受到非零信号的探测器个数与转动次数图通过图形能够得出最大值为289,对应的转动次数分别为58、59、60、61、62、63、64、64,取其均值作为存在最大值的转动次数,均值为61,最小值为137,对应的转动次数为150、152,取其均值作为存在最小值的转动次数,均值为151,根据图像是平滑的曲线,不存在任何突变,且不存在两组完全相同的探测器数据,因此可以假设CT为均匀旋转,且每次旋转1度,则初始位置为29度。