基于Matlab_Simulink的四轮转向汽车操纵稳定性仿真
- 格式:pdf
- 大小:133.89 KB
- 文档页数:2
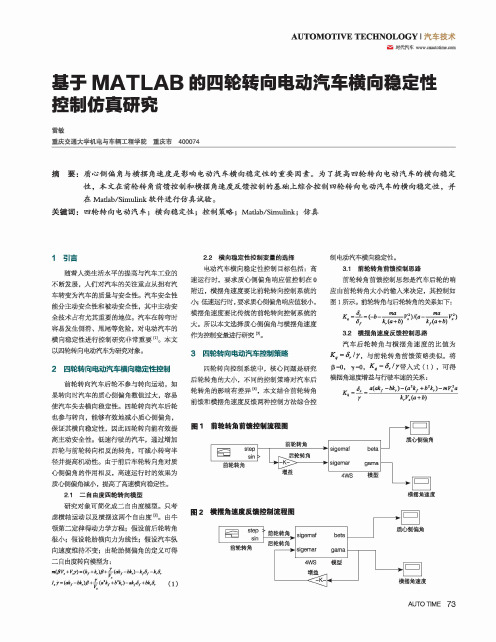
基于MATLAB 的四轮转向电动汽车横向稳定性 控制仿真研究雷敏重庆交通大学机电与车辆工程学院重庆市400074AUTOMOTIVE TECHNOLOGY 丨汽车技术D 时代汽车 摘要:质心侧偏角与横摆角速度是影响电动汽车横向稳定性的重要因素。
为了提高四轮转向电动汽车的横向稳定性,本文在前轮转角前馈控制和横摆角速度反馈控制的基础上综合控制四轮转向电动汽车的横向稳定性,并 在Matlab /Simulink 软件进行仿真试验。
关键词:四轮转向电动汽车;横向稳定性;控制策略;Matkb /Simulink ;仿真1引言随着人类生活水平的提高与汽车工业的不断发展,人们对汽车的关注重点从拥有汽 车转变为汽车的质量与安全性。
汽车安全性 能分主动安全性和被动安全性,其中主动安 全技术占有尤其重要的地位。
汽车在转弯时 容易发生侧滑、甩尾等危险,对电动汽车的 横向稳定性进行控制研究非常重要[\本文 以四轮转向电动汽车为研究对象。
2四轮转向电动汽车横向稳定性控制前轮转向汽车后轮不参与转向运动,如果转向时汽车的质心侧偏角数值过大,容易 使汽车失去横向稳定性。
四轮转向汽车后轮 也参与转向,能够有效地减小质心侧偏角, 保证其横向稳定性,因此四轮转向能有效提 髙主动安全性。
低速行驶的汽车,通过增加 后轮与前轮转向相反的转角,可减小转弯半 径并提高机动性。
由于前后车轮转向角对质 心侧偏角的作用相反,高速运行时的效果为 质心侧偏角减小,提髙了髙速横向稳定性。
2.1二自由度四轮转向模型研究对象可简化成二自由度模型。
只考 虑横轴运动以及横摆这两个自由度[2]。
由牛 顿第二定律得动力学方程;假设前后轮转角 很小;假设轮胎横向力为线性;假设汽车纵 向速度维持不变;由轮胎侧偏角的定义可得 二自由度转向模型为:m{fivx + Vxy) = (kf +kr)P+^r{akf -bkr)-k f 5f -k r5r Izy = (akf -bkr)/3+^ (a %\b \)-a k f 5f +bkrSr⑴2.2横向稳定性控制变蛋的选择电动汽车横向稳定性控制目标包括:高 速运行时,要求质心侧偏角响应值控制在0 附近,横摆角速度要比前轮转向控制系统的 小;低速运行时,要求质心侧偏角响应值较小, 横摆角速度要比传统的前轮转向控制系统的 大。

宋凯凯▶◀……………………………………………………………………………四轮转向车辆操纵稳定性仿真分析前言随着科技的进步和汽车产业的发展,人们对于车辆操纵稳定性、舒适性和安全性的要求不断提高,四轮转向(Four-wheel steering ,4WS )作为一种有效改善车辆操纵性能的技术,吸引了国内外众多研究人员[1]。
使用4WS 技术的主要目的有:①减少车辆质心侧偏角β;②减少车辆横摆率与车辆横向加速度之间的相差;③增加轮胎横向力的裕度,使其远离饱和状态[2]。
运用4WS 技术可以有效地减小低速行驶时汽车的转弯半径,使汽车在低速时行驶更加灵活、便于泊车。
同时,4WS 技术还可以大大地改善汽等瞬态响应指标,提高高速行驶时的操纵稳定性和舒适性[7]。
Matlab 作为一种面向科学和工程计算的高级计算机语言,已成为国际科技界公认的最优秀应用软件[3]。
Simulink 是Matlab 提供的主要工具箱之一,用于可视化的动态系统建模、仿真和分析。
它采用系统模块直观地描述系统典型环节,因此十分方便地建立系统模型而不需要花较多时间编程。
并可以对系统作适当的实时修正或者按照仿真的最佳效果来调试及整定控制系统的参数,以提高系统的性能,减少设计系统过程中反复修改的时间,实现高效率地开发系统的目标[2]。
本文基于Matlab/simulink 对四轮转向车辆的控制系统进行了设计,并对4WS 车辆的操纵稳定性进行了仿真研究。
4WS 车辆运动数学模型4WS 车辆模型根据自由度不同可分为二自由度、三自由度以及多自由度模型。
高自由度车辆模型虽然能较好地反映出汽车的运行状况,但研究起来困难很大。
理论和实验都证明,F Y2F Y1δ2V 2a 1bavV C.Gβu ωV 1δ1a 1图1二自由度四轮转向汽车模型在正常车速的非紧急状态和小转向角情况下,包含横摆角速度和质心侧偏角的线性二自由度自行车模型能以较好的精度表征车辆转向的实际物理过程,基于它们设计的控制器能够正常工作[4][8][10]。

10.16638/ki.1671-7988.2021.03.010基于MATLAB/Simulink的车辆转向稳定性的仿真研究马园杰,周旭(湖北汽车工业学院机械工程学院,湖北十堰442000)摘要:汽车的操纵稳定性是衡量汽车安全性最基本的指标之一,影响汽车行驶稳定性的基本因素主要有横摆角速度与质心侧偏角,将汽车简化为二自由度模型,建立关于横摆角速度与质心侧偏角的转向微分方程。
基于MA TLAB/Simulink软件建立仿真模型,对前轮转向与四轮转向典型的二自由度汽车模型进行仿真分析。
对比两轮转向和四轮转向的稳定性。
且四轮转向采用线控转向,将线控转向系统与四轮转向系统的优点结合起来,观察采用线控对汽车稳定性的影响。
关键词:二轮转向;四轮转向;横摆角速度;质心侧偏角中图分类号:TP391.9;U463.41 文献标示码:A 文章编号:1671-7988(2021)03-34-03 Simulation Research on Vehicle steering stability based on MATLAB/SimulinkMa Yuanjie, Zhou Xu(Department of Mechanical Engineering, Hubei University of Automotive Technology, Hubei Shiyan 442000)Abstract:Vehicle handing stability is the index to measure automobile safety. Yaw velocity and side slip angle are the basic factors that affect the vehicle handing stability. Simplify the car to two degree of freedom model. This paper establi -shed the differential equations of Yaw velocity and side slip angle. Using the MA TLAB/Simulinl to create the simulation model and analyze the stability of Vehicle steering system. Combine the advantage of the wire steering system with four wheel steering , Observe its effect on stability.Keywords: Two wheel steering; Four wheel steering; Yaw velocity; Side slip angleCLC NO.: TP391.9; U463.41 Document Code: A Article ID: 1671-7988(2021)03-34-03前言随着人们对现代汽车安全性及操纵稳定性的关注,汽车行驶稳定性越来越成为人们备受关注的焦点。
万方数据趋向非线性,转向时的侧倾运动也不容忽视,故而,基于线性二自由度汽车模型得出的四轮转向控制规律不能适应汽车的实际状况.文中考虑了侧倾对汽车的影响,建立了三自由度四轮转向汽车模型,运用Simulink进行了分析,得出该汽车模型的控制特性.在此基础上,运用BP神经网络方法训练得到了四轮转向汽车控制器,并将其和汽车模型一起在Simulink中仿真.1三自由度四轮转向汽车动力学模型包含侧向、横摆、侧倾运动的线性三自由度四轮转向汽车模型的运动微分方程‘31:mu(口+r)一m。
鄙=砖(卢+詈一岛一Rr咖)+后,(p—brH一6,一Rr4,)(1)ti—k吊=。
k,(/3+arM一&一月r咖)一bkr(fl—br“一艿,一尺,咖)(2)厶‘|I—Li—m。
矗u(口+r)=m。
ghq,一后击咖一c,6(3)式中m为整车质量;m。
为簧载质量;a,b为质心至前后轴距离;h为侧倾力臂;Ix为簧载质量绕戈轴的转动惯量;t为整车绕z轴的转动惯量;乞为惯性积;k,,矗,分别为前、后轴综合侧偏刚度;k。
为前、后悬架侧倾角刚度之和;C小为前、后悬架侧倾角阻尼之和;咖为车身侧倾角;r为横摆角速度;u为纵向速度;卢为质心处侧偏角;,国,6,分别为汽车前、后轮转角;R,,R,分别为前、后轮侧倾转偏系数.考虑轮胎侧偏特性的非线性因素,文中引入由郭孔辉院士提出的轮胎统一模型的侧偏力模型H】:巧=1一exp(一日一E0:一(E2+丧)矿)(4)其中r等㈩h老式中参数E为曲率因子;“为轮胎侧偏角;墨为侧偏刚度;p,为侧向摩擦系数;Z为垂直载荷;Fy为侧偏力.2四轮转向汽车神经网络控制器设计四轮转向控制目标…:汽车中高速行驶情况下,小转角时,保持汽车的质心处侧偏角为0;大转角时,能够控制后轮转向角度而抗侧滑,保持行车的稳定性;汽车低速行驶情况下,在机构允许的范围内具备最大的机动性.在Simulink环境下建立四轮转向汽车模型,汽车参数见表1.表1汽车参数Tab.1Vehicleparameters名称数值名称数值m/kg1067kt/(N/rad)一55ooom。

基于Simulink的车辆两自由度操纵稳定性模型汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。
本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。
研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。
车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。
客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。
1.二自由度汽车模型为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2.运动学分析分析时,令车辆坐标系原点与汽车质心重合。
首先确定汽车质心的(绝对)加速度在车辆坐标系中的分量。
确定汽车质心的(绝对)加速度在车辆坐标系的分量 和 。
Ox 与Oy 为车辆坐标系的纵轴与横轴。
质心速度 1与t 时刻在Ox 轴上的分量为u ,在Oy 轴上的分量为v 。
2.1 沿Ox 轴速度分量的变化为:由于汽车转向行驶时伴有平移和转动,在t+△t 时刻,车辆坐标系中质心速度的大小与方向均发生变化,而车辆坐标系中的纵轴和横轴亦发生变化,所以沿x 轴速度分量变化为:()cos ()sin cos cos sin sin u u u v v u u u v v θθθθθθ+∆∆--+∆∆=∆+∆∆---∆∆考虑到Δθ很小并忽略二阶微量,上式变成:Δu-v Δθ,除以Δt 并取极限,便是汽车质心绝对加速度在车辆坐标系Ox 和Oy 上的分量为:2.2 二自由度动力学方程因此我们可以得出两自由度的基本操纵模型的运动方程:由于假设侧片刚度在线性区域,所以F y = -K αα(公式2) 在单轨模型中,前轮的侧向速度为v f =v+ar后轮的侧向速度为v r =v-br当α很小的时候,可以认为tan α≈α 所以:() 1 r yf yrz r yf yrm v uw F F I w aF bF +=+⎧⎪⎨=-⎪⎩(公式) 3r r r f u bw u u aw u ααδ-⎧≈⎪⎪⎨+⎪≈-⎪⎩(公式)12121221212112()()()()()r rZ r r k k ak bk m v uw k v w u u ak bk a k b k I w ak v w u u k δδ+-⎧+=--⎪⎪⎨-+⎪=--⎪⎩其中k 为前轮侧偏刚度为后轮侧偏刚度将转向输入δ作为系统的输入放在方程右边,并以状态空间方程的形式来表示,则可得到系统的运动方程为:2.3 转化成标准的状态空间方程转化为标准的状态空间方程为:()121212211212()()00()()z r r k k ak bk mu u um v v k I w w ak ak bk a k b k u u δ+-⎛⎫+ ⎪⎛⎫⎛⎫⎛⎫⎛⎫⎪+= ⎪⎪ ⎪ ⎪⎪-+⎝⎭⎝⎭⎝⎭⎝⎭⎪⎝⎭11;;;r X AX BUv A P Q B P R X U w δ--=+⎛⎫=-=== ⎪⎝⎭其中输入矢量为()121222121211;()()()()010r z z z X AX BUY CX DU v X U w k k ak bk u mu muA ak bk a k b k I u I u k mBCD ak I δ=+=+⎛⎫== ⎪⎝⎭+-⎛⎫-+ ⎪⎪= ⎪-+ ⎪⎝⎭⎛⎫- ⎪⎪=== ⎪- ⎪⎝⎭其中M文件定义的参数值Simulink模型二自由度汽车Simulink模型横摆角速度阶跃响应2.4以状态方程建立的仿真图A=-inv(p)*QB=inv(p)*RC=[0 1];D=[0];得到的仿真结果如上图的阶跃响应结果一样,不再给出。
武汉理工大学课程论文基于Matlab/Simulink的四轮转向汽车操纵动力学仿真分析课程:汽车动力学学院(系):汽车工程学院专业班级:汽研学号:学生姓名:任课教师:乔维高基于Matlab/Simulink 的四轮转向汽车操纵动力学仿真分析摘要:本文分析了四轮转向(4WS)汽车的运动特性,建立了三自由度四轮转向汽车动力学模型,并基于Matlab /Simulink 对四轮转向汽车的操纵动力学进行仿真分析,结果表明四轮转向汽车的操纵性能要优于前轮转向汽车。
关键词:汽车,四轮转向,操纵动力学,仿真分析Simulation for the Handling Dynamics of Four-wheelSteering Vehicle Based on Matlab/SimulinkAbstract:Inthispaper,themotioncharacteristicsoffour-wheelsteering(4WS)vehicle are analyzed.The three degrees of freedom simulation analysis of four-wheel steering vehicle dynamics model is established. The simulation forthe handling dynamics of four-wheel steering vehicle based on Matlab / Simulink is done, and the results show that the handling performance of four-wheel steering vehicle is better than the front wheel steering vehicle.Key words:vehicle, four-wheel steering, handling dynamics, simulation 1 引言早期的汽车均采用前轮转向方式,但传统的前轮转向汽车具有低速时有低速时转向响应慢,回转半径大,转向不灵活;高速时方向稳定性差等缺点。
毕业设计(论文)英文文献翻译译文题目四轮转向汽车的操纵稳定性仿真专业车辆工程班级 0712班姓名梁健斌学号 2007715040 指导教师凌锡亮职称高级工程师机械工程学院四轮转向汽车的操纵稳定性仿真[摘要]基于前轮转向车辆在低速时的转向半径大、高速时转向稳定性差,有必要研究四轮转向汽车技术。
建立四轮转向汽车的二自由度模型和微分方程。
在零侧滑的质心线性控制策略下,可得到车轮的转向角速比,矩阵状态和传递函数。
使用MATLAB软件,可以在时间域和频率域中对四轮转向汽车和二轮转向汽车进行仿真和比较。
为了得到更加精确的结果,建立车辆虚拟样机模型,并且使用ADAMS对汽车的操纵稳定性进行分析。
结果表明,使用四轮转向汽车技术能够减小汽车在低速时的转弯半径,同时提高汽车在高速时的操纵稳定性。
[关键词]四轮转向汽车;操纵稳定性;虚拟样机;仿真1 引言车辆高速行驶时,驾驶安全性显得极为重要。
由于高速时车身的大偏航角和大侧滑角,仅仅靠转动车轮是无法很好的控制车轮转动的。
但是,四轮转向汽车具有以下优点:汽车低速转向时,转向半径很小,汽车可以灵活转动;汽车高速转向时,转向半径变的很大,可以很快的变化车道,同时车身不会产生大的偏摆。
因此,四轮转向汽车可以有效地提高汽车高速时的操纵稳定性和低速时的灵敏性。
本文选取四轮转向汽车作为研究对象。
首先,建立基于前轮转角和后轮转角的二自由度汽车数学模型,对汽车的操纵稳定性进行分析。
然后,根据不同车速,运用ADAMS软件建立四轮转向汽车和二轮转向汽车的汽车虚拟样机模型,对汽车的操纵稳定性进行分析。
仿真结果显示,四轮转向汽车的擦总稳定性要优于二轮转向汽车。
2 四轮转向汽车的数学模型分析2.1数学模型考虑轮胎侧滑力和转向机构,建立四轮转向汽车转向时的二自由度数1δ 学模型,如图1所示,其中作如下假设:四轮转向汽车为对称刚体,汽车运动速度恒定,坐标系固定在车上。
所建立数学模型如下:)ω(2δcos δcos 211∑r Y Y yu v m F F F +=+=•∑ωδcos δcos α2211•==z Y Y zI bF F M (1)根据几何学和运动学关系,得到如下函数:111δωβδωαu a u a v r r+=+=222δωβδωαub ub v r r==(2)故得到侧向力1Y F ,2Y F)δωβ(α11111u a k k F r Y +==)δωβ(α22222ub k k F r Y == (3)当1δ、2δ很小时得到cos 1δ≈1,cos 2δ≈1, 2δ=K 1δ,K 为比例系数。
基于Matlab /S im ulink 的四轮转向汽车操纵稳定性仿真陈 雯,张竹林(山东交通学院汽车工程系,济南 250023)摘要:分析了四轮转向(4W S)汽车的运动特性,建立了四轮转向汽车数学模型,得到质心侧偏角与前轮转角之间的传递函数,基于M atl ab /S i m u li nk 研究了四轮转向汽车的操纵稳定性。
并给出了仿真实例和结果,表明4W S 车辆在高速范围内保持对操纵反应的灵敏、一致又不过度,在降低驾驶员操纵难度的情况下,较大地改善了车辆在高速时的瞬态操纵稳定性。
关键词:四轮转向;操纵稳定性;仿真;Matl a b /s m i ulink中图分类号:U 461.6 文献标识码:B 文章编号:1006-0006(2010)01-0075-02Si m ul ati on of H andling Stability of 4W S V ehicleBased on M atl ab /Si m uli nkC HE N W en,Z HANG Zhu lin(Depart m ent of A utomo ti ve Eng i nee ri ng ,Shandong Jiaotong U n i versity ,Ji nan 250023,Ch i na)Abstr ac:t In this paper ,the motion characteristics of f our w hee l steering(4W S)vehic l e are ana lyzed .T he mathe m ati ca lmode l i s establi shed ,and the transfer funeti on o f side sli p ange l o fm ass conter to steer i ng angel o f 4W S vehic l e i s obta i ned .Based on M atl ab /s i m u li nk ,the hand li ng stability of 4W S v eh i c le is stud i ed ,and the si m ulation examp l e and resu lt are also g i v en .S i m u l a tion show s that t he 4W S v eh i c le is ag ility and consistent w ith steeri ng i nput ,and t he transient handli ng stab ility is i m proved d i sti nctively w ithout i ncreasi ng driver s handli ng difficu lty .Key wor ds :Four wheel steer i ng(4W S);H andli ng stab ility ;S im ulati on ;M a tlab/si m uli nk 四轮转向(4W S)是指汽车在转向时,除前轮转向外,再附加后轮转向。
四轮转向系统是由前后轮两套转向器组成,二者由中间轴连接,由前轮转角和车速或前轮转向力与车速作为后轮转向的控制信号。
这种附加后轮转向是有限的,与前轮转向角有一定的比例关系,一般比前轮转向角要小,其目的是改善整车的转向特性和响应特性。
它主要有两方面的作用:一是提高车辆高速稳定性,尤其在紧急换道行驶时;二是可以提高车辆在密集停放的停车场上进出的灵活性[1~2]。
1 4W S 的运动特性汽车转弯时的几何关系如图1所示[3]。
2W S 汽车只有前轮转角,而4W S 汽车的后轮也有转角。
由图可知,当仅有前轮转角 1时,可求得转向半径R 0=Ltan 1当前轮转角不大时,tan 1 1。
于是上式可写为R 0=L1当后轮有附加转角 2时,可求得转向半径R =Lt an 1-tan 2同样,当 1和 2不大时,上式可写为R =L 1- 2=L1(1-K f )式中,K f 为后轮与前轮转角比。
显然,当前轮转向,后轮不转向时,K f =0,R =R 0;当前后轮同向转向时,K f >0,R >R 0;当前后轮反向转向时,K f <0,R <R 0。
图1 汽车转弯时的转向几何关系Fig .1Geo me t ric Re lation w h en Turning也就是说,前、后轮反向转向时会减小转弯半径,增加车辆运动的机动性,所以,4W S 汽车低速转弯或急转弯时,前、后轮反向转向;而高速转弯或变换车道时,前、后轮同向转向,实际上增大了转弯半径,减小了离心力,转弯平稳,便于控制。
2 4W S 汽车的操纵稳定性分析2.1 4WS 汽车的线性二自由度汽车模型及运动方程为了得到比较简明的关系式,对其操纵稳定性的基本特性进行分析,特做以下假设[4]:!忽略转向系的影响,直接给前后轮一个转角;∀忽略悬架的作用,车身与悬架为一体;#忽略地面切向力与载荷的变化等引起轮胎的特性变化;∃汽车前进速度不变。
这样,汽车简化为一个由前后有侧向特性的轮支撑于地面、具有侧向及横摆运动的二自由度汽车模型,如图2所示。
令车辆坐标系的原点与质心重合。
由达朗伯原理得四轮转向汽车运动方程%F +F R =0收稿日期:2008-11-22&75&第37卷第1期 拖拉机与农用运输车 V o.l 37N o .12010年2月 T racto r&F ar m T ransporter Feb .,2010图2 二自由度汽车模型F i g .2T w o Degrees o f Freed o m Vehicle M od e l%M +M R=0式中,F R ,M R 为惯性力和惯性力矩,F R =ma y =m ( v +u r ),M R =I &r 。
得到4W S 汽车的二自由度运动微分方程m ( v +u r )=(k 1+k 2) +1u(a k 1-bk 2) r -(k 1 1+k 2 2)I z &r =(ak 1-bk 2) +1u(a 2k 1+b 2k 2) r +bk 2 2-ak 1 1(1)式中,m 为汽车质量; v 为汽车质心侧向加速度;u 为汽车车速; 1, 2分别为前后轮转角; r 为汽车横摆角速度; &r 为汽车横摆角加速度; 为汽车质心侧偏角;I z 为汽车绕z 轴的转动惯量;k 1,k 2分别为前后轮轮胎侧偏刚度;a,b 分别为汽车质心至前后轴的距离。
2.2 前、后轮阶跃输入下汽车的响应1)稳态响应给直行汽车前后轮一个阶跃输入,经过短暂的时间后,汽车进入稳态响应。
本文采用稳态横摆角速度增益(稳态时横摆角速度与前轮转角之比)来评价稳态响应。
稳态横摆角速度为定值,此时 v =0, &=0,并设后、前轮转角比 2/ 1=K f ,且转向相同,代入式(1),求得稳态时横摆角速度增益为r1s=(1-K f )u /L 1+mu 2L2-a k 2-b k 1(2)当K f =0时,即为两轮转向的横摆角速度增益r1s=u /L1+mu 2L 2-a k 2-b k 1(3)若前、后轮转向相反,侧其横摆角速度增益r 1s=(1+K f )u /L 1+mu2L 2-a k 2-b k 1(4)通过以上各式的比较,可知4W S 汽车同向的横摆角速度增益要小于2W S 汽车,即稳态响应优于2W S 汽车;而反向转向时其值更大,所以高速时前、后轮要同向转向。
2)瞬态响应下面分析给汽车前后轮一角阶跃输入后,过渡过程中汽车横摆角速度响应 r (t)。
将式(4)进行微分方程求解,由 =v u, &=v u,消去式中的 和 v ,其中 =I z &r - r u(a 2k 1+b 2k 2)+(ak 1 1-bk 2 2)ak 1-bk 2v =u (I z &r +ak 1 &1-ak 2 &2)- &r (a 2k 1+b 2k 2)ak 1-bk 2将等式写成以 r 为变量的形式M ∋ &&r +h &r +c r =b 1 &1+b 1 1(5)式中,M ∋=m uI z ;h =-m (a 2k 1+b 2k 2)+(k 1+k 2)I z ;c =m u (a k 1-bk 2)+L 2k 1k 2/u;b 1=-m u (ak 1-K f bk 2);b 2=L k 1k 2(1-K f )。
本文仿真所用模型参数为:m =1100kg ,I z =1600kg &m 2,a =1.15m,b =1.35m,k 1=-32000N /rad ,k 2=-45000N /rad ,k f =0.3。
运用M atl ab /S i m u li nk 对4W S 汽车的操纵稳定性进行仿真[5],在前轮转角为单位阶跃输入下,汽车横摆角速度的时域响应如图3~图5所示。
图3 后轮同向转向4WS 汽车的瞬态响应Fi g .3Tran sient Response o f 4W S Veh i c l e w ith Rea rW he e ls Sa me Ste e rin g图4 2WS 汽车的瞬态响应Fig .4Tra nsient R esponse o f 2WS Veh i c l e图5 后轮反向转向4WS 汽车的瞬态响应Fig .5Tra nsi e nt Res pon se of 4WS Vehicl e w ith Re a rWhe e l s Con versely St e e ri n g由图可见,4W S 汽车前、后轮同向转向时,其横摆角速度增益要远小于反向转向和2W S 汽车,其过渡时间也小于2W S 汽车。
说明4W S 汽车的瞬态特性明显好于2W S 汽车,这有利于汽车高速换道行驶时(如超车),增强汽车的操控性。
4W S 汽车前、后轮反向转向时(如图5所示),则横摆角速度增益大于同向转向和2W S 汽车,这意味着4W S 汽车在低速时,可以明显减轻驾驶员的负担,使汽车灵活易控。
3 结论4W S 汽车低速时前后轮采用反向转向,高速时前后轮采用同向转向,提高了汽车低速行驶的机动性和高速行驶的操纵稳定性。
参考文献:[1] 汪东明.四轮转向汽车的转向特性及控制技术[J].现代机械,2003(6):73~75.[2] 杨峰,高翔,王若平,等.两轴四轮汽车四轮转向机构的运动分析[J].中国农机化,2004(6):50~53.[3] 张洪欣.汽车系统动力学[M ].上海:同济大学出版社,1996.[4] 余志生.汽车理论[M ].北京:机械工业出版社,2004.[5] 黄文梅.系统仿真分析与设计&MATL AB 语言工程应用[M ].长沙:国防科技大学出版社,2001.(编辑 姜洪君)作者简介:陈雯(1961-),女,山东泰安人,副教授,工学硕士,研究方向为汽车系统动力学。