调速永磁同步电机的设计计算程序
- 格式:pdf
- 大小:143.12 KB
- 文档页数:13
永磁同步电机设计流程永磁同步电机是一种应用广泛的电机类型,具有高效率、高功率因数和高控制精度等优点,因此在许多领域得到了广泛的应用。
设计一台高性能的永磁同步电机需要经过一系列的流程,本文将详细介绍永磁同步电机的设计流程。
一、需求分析在设计永磁同步电机之前,首先需要明确电机的使用需求。
包括电机的功率需求、转速范围、工作环境条件等。
通过对需求的分析,可以为后续的设计提供指导。
二、磁路设计磁路设计是永磁同步电机设计的关键步骤之一。
磁路设计的目标是确定合适的磁路结构和尺寸,以实现预期的性能指标。
在磁路设计中,需要考虑永磁体的选用、磁路的饱和效应、磁路的损耗等因素。
三、电磁设计电磁设计是永磁同步电机设计的另一个重要步骤。
电磁设计的目标是确定合适的绕组结构和参数,以实现预期的性能指标。
在电磁设计中,需要考虑绕组的匝数、线径、绕组方式等因素,以及永磁体和绕组之间的磁场分布和相互作用。
四、机械设计机械设计是永磁同步电机设计的另一个关键步骤。
机械设计的目标是确定合适的机械结构和尺寸,以满足电机的运行要求。
在机械设计中,需要考虑电机的轴承结构、散热结构、防护结构等因素,以及电机的安装方式和连接方式。
五、控制系统设计控制系统设计是永磁同步电机设计的最后一步。
控制系统设计的目标是确定合适的控制策略和参数,以实现电机的稳定运行和精确控制。
在控制系统设计中,需要考虑电机的闭环控制方式、控制器的选择和参数调节等因素,以及电机与其他设备的通讯和配合。
六、样机制造与测试在完成永磁同步电机的设计之后,需要进行样机制造和测试。
样机制造的目标是按照设计要求制造出一台符合性能指标的永磁同步电机。
样机测试的目标是验证电机的性能和功能是否满足设计要求。
通过样机制造和测试,可以进一步改进和优化设计。
七、生产与应用在样机测试通过之后,可以进行电机的批量生产和应用。
在生产过程中,需要注意生产工艺和质量控制,以确保电机的一致性和可靠性。
在应用过程中,需要根据具体的使用场景和需求,对电机进行调试和优化,以实现最佳的性能和效果。
永磁同步电动机调速控制系统的设计
永磁同步电动机调速控制系统是一种高性能的电动机调速系统,广泛应用于工业生产和交通运输等领域。
本文将介绍永磁同步电动机调速控制系统的设计原理和关键技术。
需要了解永磁同步电动机的工作原理。
永磁同步电动机是一种通过磁场同步转速实现转速调节的电动机。
它的主要特点是结构简单、功率密度高、效率高,而且具有较好的调速性能和动态响应特性。
永磁同步电动机调速控制系统主要由电机模型、控制器和功率放大器组成。
电机模型用于描述电机的动态特性,控制器用于设计调速算法,功率放大器则用于控制电机的电流和转矩。
在设计永磁同步电动机调速控制系统时,首先需要建立电机的数学模型。
该模型通常由永磁同步电动机的转矩方程、电流方程和转速方程组成。
利用这些方程可以计算出电机的电流和转矩,从而实现对电机的调速控制。
接下来,需要设计合适的控制器来实现电机的调速控制。
控制器通常采用基于反馈的控制算法,例如比例积分控制(PI控制)。
通过监测电机的转速和电流,控制器可以根据设定值和反馈信号来调整电机的输出转矩,从而实现电机的调速控制。
需要使用功率放大器来控制电机的电流和转矩输出。
功率放大器通常采用PWM(脉冲宽度调制)技术,通过调节电流的占空比来控制电机的输出转矩。
这样可以实现电机的平滑运行,并且提高整个系统的效率和稳定性。
永磁同步电动机调速控制系统设计涉及到电机模型建立、控制器设计和功率放大器选择等关键技术。
通过合理的设计和调试,可以实现永磁同步电动机的精确调速控制,从而满足不同应用场景的需求。
这对于提高工业生产效率和减少能源消耗具有重要意义。
永磁同步电动机调速控制系统的设计一、绪论永磁同步电动机具有结构简单、效率高、功率密度大等优点,因此广泛应用于各个领域。
调速控制是永磁同步电动机实现精确运动控制的关键技术之一。
本文主要介绍永磁同步电动机调速控制系统的设计原理和方法。
二、永磁同步电动机调速控制系统的基本原理永磁同步电动机调速控制系统的基本原理是通过改变电机的输入电压和电流,控制电机的转速和转矩。
常用的调速方法有频率调制、占空比调制、矢量控制等。
三、永磁同步电动机调速控制系统的设计流程1. 系统需求分析:根据实际应用需求确定电机的转速和转矩要求,了解系统所需的控制精度和性能指标。
2. 硬件设计:选择适合的电机驱动器,根据电机的电流和电压要求确定电源电压和功率等参数。
设计电路板布线和连接,选择合适的传感器和检测器。
3. 控制算法设计:根据电机的数学模型和特性,设计合适的控制算法。
常用的控制算法有PID控制、模糊控制、自适应控制等。
4. 调试和测试:搭建系统实验平台,进行控制系统的调试和测试。
根据实际测试情况对系统参数进行修正和优化。
四、永磁同步电动机调速控制系统的关键技术1. 电机控制算法:根据永磁同步电动机的特性和性能要求选择合适的控制算法,并调整算法参数以获得良好的控制效果。
2. 电机驱动器设计:选用合适的电机驱动器,合理匹配输出功率和电机的功率需求,提高系统的效率和稳定性。
3. 传感器和检测器选择:选择适合的传感器和检测器,监测电机的状态和性能参数,提供准确的反馈信号。
四、结论永磁同步电动机调速控制系统是实现电机精确控制的重要技术,本文简述了其基本原理和设计流程,并介绍了关键技术。
希望能对相关领域的研究和应用提供一定的参考和指导。
KW调速永磁同步电动机电磁设计方案程序第一步:确定设计参数1.确定工作功率:根据应用需求确定电动机的额定功率,例如10KW。
2.确定额定电压和额定频率:根据应用需求确定电动机的额定电压和额定频率。
3.确定电机的极对数:根据电动机的输入电压和频率,计算电机的巡线频率,从而确定电机的极对数。
4.确定磁场势和磁铁尺寸:根据电机的额定功率和电机的极对数,计算电机的磁场势,从而确定所需的永磁体尺寸。
第二步:电机电磁设计计算1.计算电机的相间电压和相间电流:根据电动机的额定功率和电机的额定电压,计算电机的相间电流。
2.计算电机的磁通和永磁体的磁通密度:根据电机的相间电流和电机的极对数,计算电机的磁通。
根据电机的磁通和电机的磁铁尺寸,计算永磁体的磁通密度。
3.计算电机的绕组电阻和绕组电感:根据电机的相间电压和电机的相间电流,计算电机的绕组电阻。
根据电机的相间电压和电机的极对数,计算电机的绕组电感。
4.计算电机的工作转速和输出扭矩:根据电机的输入电压、电机的绕组电阻和电机的电磁转矩,计算电机的工作转速和输出扭矩。
第三步:电机电磁设计方案优化1.根据应用需求对电机的工作转速和输出扭矩进行调整:根据应用需求,对电机的工作转速和输出扭矩进行调整,例如增加或减小电机的绕组电阻或电机的磁通密度。
2.重新计算电机的绕组电阻和绕组电感,以及工作转速和输出扭矩:根据调整后的电机参数,重新计算电机的绕组电阻和绕组电感,以及工作转速和输出扭矩。
3.根据计算结果,评估电机的电磁设计方案的可行性和性能:根据计算结果,评估电机的电磁设计方案的可行性和性能,例如判断电机的工作转速和输出扭矩是否达到设计要求。
4.如有必要,进行多次优化和调整,以获得满足设计要求的电磁设计方案。
总结:以上是一个KW调速永磁同步电动机电磁设计方案的基本步骤和程序。
通过确定设计参数,进行电机电磁设计计算,以及根据应用需求进行优化和调整,可以获得满足设计要求的电磁设计方案。
毕业设计题目:调速永磁同步电动机的电磁设计系:电气与信息工程专业:电气工程班级:学号:学生姓名:///导师姓名:完成日期:2011年6月诚信声明本人声明:1、本人所呈交的毕业设计(论文)是在老师指导下进行的研究工作及取得的研究成果;2、据查证,除了文中特别加以标注和致谢的地方外,毕业设计(论文)中不包含其他人已经公开发表过的研究成果,也不包含为获得其他教育机构的学位而使用过的材料;3、我承诺,本人提交的毕业设计(论文)中的所有内容均真实、可信。
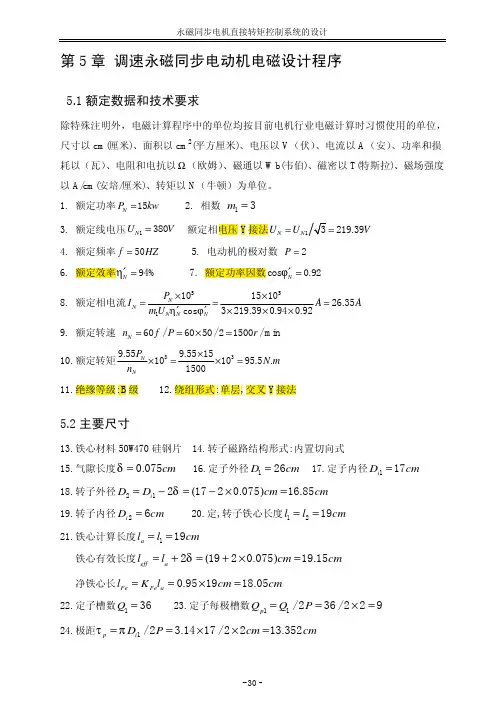
作者签名:日期:年月日毕业设计(论文)任务书题目: 调速永磁同步电动机的电磁设计姓名 系 电气系 专业 电气工程及其自动化 班级 .. 学号 ..指导老师 .. 职称 副教授 教研室主任 ..一、基本任务及要求: 1、基本技术要求:1)额定功率 N P =15KW ; 2)额定电压 V U N 380=3)额定转速 min /1500r n N =; 4)额定效率%94=N η; 5)相数m=36)Hz f N 50=; 7)额定功率因数92.0cos =N ϕ; 8)绕组形式:单层,交叉Y 接9)失步转矩倍数 8.1=*Npo T ; 2、本毕业设计课题主要完成以下设计内容:(1)调速永磁同步电动机的电磁设计方案;(2)阐述永磁同步电动机的运行与控制原理;(3)电机主要零部件图的绘制;(4) 说明书的编制二、进度安排及完成时间:3 月1 日——3 月 30日:查阅资料、撰写文献综述、撰写开题报告 4月1 日—— 4月30 日:毕业实习、撰写实习报告 5月 1日—— 5月20 日:毕业设计(电磁设计)5月 21日——5 月30 日:毕业设计(永磁同步电动机的运行与控制 )5月上旬:毕业设计中期抽查6月1日——6月12日:撰写毕业设计说明书(论文)6月13日——6月14日:修改、装订毕业设计说明书(论文),并将电子文档上传FTP。
1、6月15日——6月18日:毕业设计答辩,进行毕业答辩。
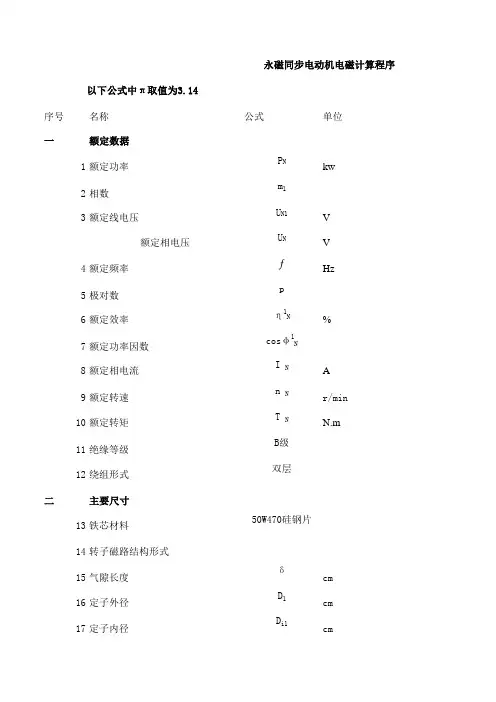
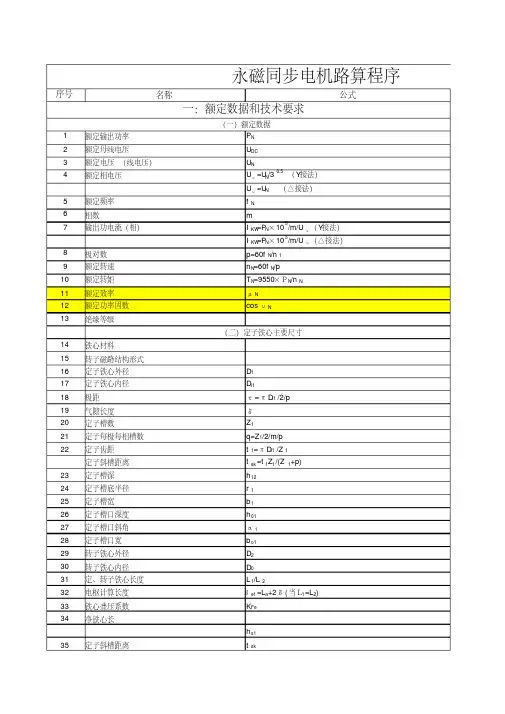
序号名称公式单位一额定数据1额定功率P Nkw2相数m13额定线电压U N1V 额定相电压U NV4额定频率ƒHz5极对数p6额定效率η1N%7额定功率因数cosφ1N8额定相电流I NA9额定转速n Nr/min10额定转矩T NN.m11绝缘等级B级12绕组形式双层二主要尺寸13铁芯材料50W470硅钢片14转子磁路结构形式15气隙长度δcm16定子外径D1cm17定子内径D i1cm永磁同步电动机电磁计算程序以下公式中π取值为3.1418转子外径D2cm19转子内径D i2cm20定、转子铁心长度l1=l2cm21铁心计算长度la=l1cm铁心有效长度l effcm铁心叠压系数K fe净铁心长l Fecm22定子槽数Q1 23定子每级槽数Q p1 24极距τp 25定子槽形梨形槽b s0cmh s0cmb s1cmh s1cmh s2cmrcm26每槽导体数N s1 27并联支路数a1 28每相绕组串联导体数NΦ129绕组线规N11S11mm230槽满率根据N11S11=1.54mm2,线径取d1/d1i=1.4mm/1.46mm,并绕根数N1(1)槽面积s scm2槽楔厚度hcm(2)槽绝缘占面积s icm2h1scm绝缘厚度C icm(3)槽有效面积s ecm2(4)槽满率sf% N1三永磁体计算31永磁材料类型铷铁棚32永磁体结构矩形33极弧系数a p34主要计算弧长b1pcm35主要极弧系数a1p 36永磁体Br温度系数a Br永磁体剩余磁通密度B r20T温度t℃t=80℃时剩余磁通密度B rT37永磁体矫顽力H c20KA/m永磁体H c温度系数a Hct=80℃时矫顽力Hc KA/m 38永磁体相对回复磁导率u ru0H/m39最高工作温度下退磁曲线的拐点b k40永磁体宽度b mcm41永磁体磁化方向厚度h Mcm42永磁体轴向长度l Mcm43提供每级磁通的截面积S M cm2四磁路计算44定子齿距t1cm45定子斜槽宽b skcm46斜槽系数K sk147节距y48绕组系数K dp1(1)分布系数K d1α°q1(2)短距系数K p1β49气隙磁密波形系数K f50气隙磁通波形系数KΦ51气隙系数Kδ52空载漏磁系数σ053永磁体空载工作点假设值b1m054空载主磁通Φδ0W b55气隙磁密Bδ056气隙磁压降δ12cm直轴磁路FδA交轴磁路Fδq 57定子齿磁路计算长度h1t1 58定子齿宽b t159定子齿磁密B t10T60定子齿磁压降F t1A查第2章附录图2E-3得H t10A/cm61定子轭计算高度h1j1cm62定子轭磁路计算长度l1j1cm63定子轭磁密B j10T64定子轭磁压降F j1cm查第2章附录图2C-4得C1查第2章附录图2E-3得H j10A/cm65磁路齿饱和系数K t66每对极总磁压降ΣF adAΣF aqA67气隙主磁导ΛδH68磁导基值ΛbH69主磁导标幺值λδ70外磁路总磁导λ1H71漏磁导标幺值λσ72永磁体空载工作点b m073气隙磁密基波幅值Bδ1T74空载反电动势E0V五参数计算75线圈平均半匝长l zl BcmdcmτycmsinαcosαC s76双层线圈端部轴向投影长f dcm77定子直流电阻R1ΩρΩ.mm2/mS1mm2d1mm78漏抗系数C x79定子槽比漏磁导λS1查第2章附录2A-3得K u1K L1λu1λL 1与假设值误差小于1%,不用重复计算80定子槽漏抗X s181定子谐波漏抗X d1Ω查第2章附录2A-4得ΣS82定子端部漏抗X e1Ω83定子斜槽漏抗X sk1Ω84定子漏抗X1Ω85直轴电枢磁动势折算系数K ad 86交轴电枢磁动势折算系数K aqK q87直轴电枢反应电流X adΩE dVI1dAF adA f1adb madΦδadW b88直轴同步电抗X dΩ89交轴磁化曲线(X aq-Iq)计算六工作性能计算90转矩角θ°91假定交轴电流I1q A92交轴电枢反应电抗X aqΩ见P428页表10-1 Xaq-Iq曲线93交轴同步电抗X qΩ94输入功率P1kwSINθSIN2θCOSθ95直轴电流I d A96交轴电流I q A97功率因数cosφ°ψ°φ°98定子电流I1A99负载气隙磁通ΦδW bEδV 100负载气隙磁密BδT 101负载定子齿磁密B t1T 102负载转子磁密B j2T 103铜耗P cu1W 104鉄耗(1)定子轭重量G j1kg(2)定子齿重量G t1kg(3)单位铁耗查第2章附录2E-4得p t1w/kgp j1w/kg(4)定子齿损耗P t1W(5)定子轭损耗P j1W(6)总损耗P Fe Wk1k2105杂耗P sP sN kw106机械损耗P fw w107总损耗ΣP kw108输出功率P2kw109效率η%110工作特性见P430表10-2111失步转矩倍数K MT max112永磁体额定负载工作点b mNf1adN113电负荷A1A/cmλ1n114电密J1A/mm2115热负荷A1J1(A/cm)(A/mm2)116永磁体最大去磁工作点b mhf1adhI adh Alaobusi算例4.00003.0000360.0000207.846096926.50003.00000.89601.00007.15960155253072.07547170.052314.814.74.8191919.10.9518.053667.7453333330.350.080.680.091.060.443213841.539699259 .4mm/1.46mm,并绕根数N1=11.0449520.20.1572481.150.030.887704 76.8400277610.82 6.4511733330.832911-0.121.22801.13216923-0.12856.544 1.0523700751.26E-063.61.219136.81.290888889 1.678155556 0.9808257135 0.932879761 0.965960169302 0.965753860.8333333331.2300402670.9406348791.2448267171.30.87 0.010365012 0.8411970220.02 1101.610936 833.7137955 1.2966666670.6405444441.793880386233.490 2.576666667 5.344105556 1.114305729 12.980832390.71.735 1.211871535 1347.991769 1080.094628 7.68922E-06 1.50683E-065.1029296776.63380858 1.5308789030.869003789 %,不用重复计算1.034706209201.529426831.682915872327.2568888890.5490852490.8357663494.3414579342.3838305111.7158936780.02171.53861.48.21E-010.9608659780.870.9050.403328710.6744.69E-016.28E-010.02051.65E-015.31E-011.63E+00 0.812981515 0.3251926060.4 6.558622511 193.4528014 1.231451467 158.2920937 0.011846361 0.858709257 0.0099496178.19E+0026.656.312.19根据I1q查表10-1得1.38E+014.44E+000.4483284510.8014937140.8938688943.25E+006.34E+000.9999593942.72E+01-5.17E-017.1248912060.010084516196.07567680.8184327131.7453347461.084150606261.317264623.264103534.2097075396.22.17 26.10018674 50.48310465 166.21667622.52 19.806546740.0227.9841 0.4753245883.97E+008.93E+010.18536125713.360.8611346311.04E-02 176.61978556.643 4.630762516 817.884282 0.4683161174.61E-014.79E+01。
永磁同步电动机调速控制系统的设计永磁同步电动机(PMSM)是一种具有高效率、高功率密度和高性能的电动机,它在工业生产和民用领域中得到了广泛的应用。
与传统的感应电动机相比,PMSM具有更高的效率和精密的控制特性,因此在工业生产中受到了越来越多的关注。
为了实现PMSM的精准控制和高效运行,必须设计一套完善的调速控制系统。
本文将针对PMSM调速控制系统的设计进行详细的介绍和分析。
一、PMSM调速控制系统的基本原理PMSM调速控制系统的基本原理是通过调节电动机的输入电压和频率来控制电动机的转速和转矩。
在PMSM中,磁场是由永久磁铁提供的,因此它的转矩与转速呈线性关系,通过调节电动机的输入电压和频率,可以精确地控制电动机的转速和转矩。
PMSM调速控制系统通常由控制器和功率电子器件两部分组成,其中控制器负责生成控制信号,功率电子器件负责调节电动机的输入电压和频率。
1. 精准控制:PMSM调速控制系统需要具有高精度的控制特性,能够实现电动机的精确调速和精密转矩控制。
3. 抗干扰能力强:PMSM调速控制系统需要具有较强的抗干扰能力,能够在复杂的工作环境中稳定运行。
5. 系统稳定性好:PMSM调速控制系统需要具有良好的系统稳定性,能够长时间稳定地运行,不受外部干扰的影响。
1. 控制器的选择:PMSM调速控制系统的控制器通常选择DSP(数字信号处理器)或FPGA(现场可编程门阵列)作为核心控制单元,这些控制器具有较高的运算速度和精确的控制特性,能够满足PMSM调速控制系统的高精度和快速响应的要求。
2. 传感器的选择:PMSM调速控制系统通常需要选择适合的传感器来实现对电动机转速、转矩和位置的实时监测和反馈,常用的传感器有编码器、霍尔传感器等。
3. 电源模块的设计:PMSM调速控制系统的电源模块需要具有较高的功率密度和高效的功率转换特性,能够为电动机提供稳定的电压和频率输出。
5. 通信接口的设计:PMSM调速控制系统通常需要与上位机或其他设备进行通信和数据交换,因此需要设计适合的通信接口和协议。
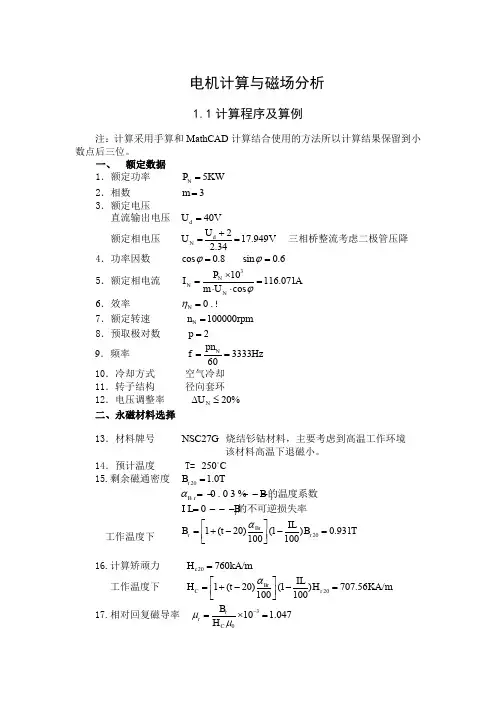
电机计算与磁场分析1.1 计算程序及算例注:计算采用手算和MathCAD 计算结合使用的方法所以计算结果保留到小数点后三位。
一、 额定数据1.额定功率 5KW N P =2.相数 3m =3.额定电压 直流输出电压 40V d U =额定相电压 217.949V 2.34d N U U +== 三相桥整流考虑二极管压降4.功率因数 cos 0.8ϕ= sin 0.6ϕ=5.额定相电流 310116.071A cos N N N P I m U ϕ⨯==⋅⋅ 6.效率 0.9N η=7.额定转速 100000rpm N n = 8.预取极对数 2p =9.频率 3333Hz 60N pnf ==10.冷却方式 空气冷却 11.转子结构 径向套环12.电压调整率 20%N U ∆≤二、永磁材料选择13.材料牌号 NSC27G 烧结钐钴材料,主要考虑到高温工作环境 该材料高温下退磁小。
14.预计温度 T= 250C 15.剩余磁通密度 20 1.0T r B =0.03%B r rB α=----的温度系数 0r I L B =---的不可逆损失率工作温度下 201(20)(1)0.931T100100Br r r IL B t B α⎡⎤=+--=⎢⎥⎣⎦ 16.计算矫顽力 20760kA/m c H =工作温度下 201(20)(1)707.56KA/m 100100Br C r IL H t H α⎡⎤=+--=⎢⎥⎣⎦17.相对回复磁导率 3010 1.047rr C B H μμ-=⨯=式中 70410H /m μπ-=⨯ 三、永磁体尺寸18.永磁体磁化方向长度 0.35cm M h =19.永磁体宽度 1.56cm M b =20.永磁体轴向长度 5.35cm M L = 21.永磁体段数 1W =22.永磁体每极截面积 28.346cm M M M A L b == 23.永磁体每对极磁化方向长度 20.7cm MP M h h == 24.永磁体体积 311.684cm m M MP V PA h == 25.永磁体质量 31095.812g m m m V ρ-=⨯= 稀土钴材料密度 38.2g/cm ρ=四、转子结构尺寸26.气隙长度 10.19cm δδ=∆+= 均匀气隙空气隙长度10.03cm δ= 非磁性套环长度 0.16cm ∆=27.转子外径 2 3.0cm D = 28.轴孔直径 2 1.0cm i D =29.转子铁心长度 2 5.35cm M L L ==30.衬套厚度 222()0.49cm 2i M h D D h h --∆+==31.极距 2(2)2.105cm 2D pπτ-∆== 径向瓦片形32.极弧系数 0.74p α=33.极间宽度 2(1)0.547cm p b ατ=-= 五、定子绕组和定子冲片34.定子外径 1 4.8cm D =35.定子内径 1212 3.06cm i D D δ=+= 36. 定子铁心长度 1 5.35cm M L L ==长径比λ=1.7537.每极每相槽数 1q =38. 定子槽数 212Q mpq ==39.绕组节距 3y = 整距绕组,影响下面一些系数40. 短距系数 180sin 12p K β==41. 分布因数 1d K = 42.斜槽因数 1sk K =43.绕组因数 1dp d p sk K K K K ==波形系数 sin()20.91.024i iK φαπα⋅==44.预估永磁体空载工作点 '00.67m b = 工作点范围在0.55-0.75Br 内但高速电机应取小一些。
永磁同步电动机调速控制系统的设计引言一、控制系统结构设计1.速度控制回路速度控制回路中一般采用PID控制器进行控制。
PID控制器由比例、积分和微分三个控制参数组成。
根据实际的反馈信号和设定的目标转速进行比较,PID控制器输出控制信号,调节电机的输入电压,从而实现对电机转速的精确控制。
2.电流控制回路电流控制回路中一般采用电流矢量控制算法进行控制。
电流矢量控制是一种通过控制电机的相电流矢量方向和大小,实现对电机转矩的精确控制的方法。
在永磁同步电动机中,通常通过调节电机的电压和频率来控制电流。
二、电机参数辨识与模型建立在控制系统设计前,需要对永磁同步电动机的参数进行辨识。
参数辨识是通过对电机的测试实验数据进行分析和处理,得到电机的相关参数,如电感、电阻、转矩常数等。
通过辨识得到的电机参数,可以建立电机的数学模型,用于控制系统设计和仿真分析。
1.参数辨识方法参数辨识可以使用多种方法,如静态法、动态法和频率扫描法等。
静态法是通过给电机施加不同的电压和载荷,测量相应的电流和转矩,根据测量数据拟合得到电机的参数。
动态法是通过给电机施加特定的电压和频率,测量相应的响应数据,利用系统辨识的方法得到电机的参数。
频率扫描法是通过改变电机的频率,测量相应的电流和转矩,根据传递函数的理论计算得到电机的参数。
2.永磁同步电动机模型建立三、控制策略设计对于永磁同步电动机的调速控制系统,可以采用多种控制策略,如传统的PI控制、模糊控制和模型预测控制等。
1.PI控制PI控制是最常用的控制策略之一,通过调节比例和积分系数来实现对电机转速的控制。
PI控制简单可靠,但对于电机模型的误差和扰动比较敏感。
2.模糊控制模糊控制是一种基于经验和模糊推理的智能控制方法,通过建立模糊规则和模糊推理机制,实现对电机的转速控制。
模糊控制能够在不确定性和非线性环境中实现较好的控制效果。
3.模型预测控制模型预测控制是一种基于模型预测和优化求解的控制方法,通过建立电机的预测模型,并进行优化求解,实现对电机的转速控制。
序号名称公式单位一额定数据1额定功率P Nkw2相数m13额定线电压U N1V 额定相电压U NV4额定频率ƒHz5极对数p6额定效率η1N%7额定功率因数cosφ1N8额定相电流I NA9额定转速n Nr/min10额定转矩T NN.m11绝缘等级B级12绕组形式双层二主要尺寸13铁芯材料50W470硅钢片14转子磁路结构形式15气隙长度δcm16定子外径D1cm17定子内径D i1cm永磁同步电动机电磁计算程序以下公式中π取值为3.1418转子外径D2cm19转子内径D i2cm20定、转子铁心长度l1=l2cm21铁心计算长度la=l1cm铁心有效长度l effcm铁心叠压系数K fe净铁心长l Fecm22定子槽数Q1 23定子每级槽数Q p1 24极距τp 25定子槽形梨形槽b s0cmh s0cmb s1cmh s1cmh s2cmrcm26每槽导体数N s1 27并联支路数a1 28每相绕组串联导体数NΦ129绕组线规N11S11mm230槽满率根据N11S11=1.54mm2,线径取d1/d1i=1.4mm/1.46mm,并绕根数N1(1)槽面积s scm2槽楔厚度hcm(2)槽绝缘占面积s icm2h1scm绝缘厚度C icm(3)槽有效面积s ecm2(4)槽满率sf% N1三永磁体计算31永磁材料类型铷铁棚32永磁体结构矩形33极弧系数a p34主要计算弧长b1pcm35主要极弧系数a1p 36永磁体Br温度系数a Br永磁体剩余磁通密度B r20T温度t℃t=80℃时剩余磁通密度B rT37永磁体矫顽力H c20KA/m永磁体H c温度系数a Hct=80℃时矫顽力Hc KA/m 38永磁体相对回复磁导率u ru0H/m39最高工作温度下退磁曲线的拐点b k40永磁体宽度b mcm41永磁体磁化方向厚度h Mcm42永磁体轴向长度l Mcm43提供每级磁通的截面积S M cm2四磁路计算44定子齿距t1cm45定子斜槽宽b skcm46斜槽系数K sk147节距y48绕组系数K dp1(1)分布系数K d1α°q1(2)短距系数K p1β49气隙磁密波形系数K f50气隙磁通波形系数KΦ51气隙系数Kδ52空载漏磁系数σ053永磁体空载工作点假设值b1m054空载主磁通Φδ0W b55气隙磁密Bδ056气隙磁压降δ12cm直轴磁路FδA交轴磁路Fδq 57定子齿磁路计算长度h1t1 58定子齿宽b t159定子齿磁密B t10T60定子齿磁压降F t1A查第2章附录图2E-3得H t10A/cm61定子轭计算高度h1j1cm62定子轭磁路计算长度l1j1cm63定子轭磁密B j10T64定子轭磁压降F j1cm查第2章附录图2C-4得C1查第2章附录图2E-3得H j10A/cm65磁路齿饱和系数K t66每对极总磁压降ΣF adAΣF aqA67气隙主磁导ΛδH68磁导基值ΛbH69主磁导标幺值λδ70外磁路总磁导λ1H71漏磁导标幺值λσ72永磁体空载工作点b m073气隙磁密基波幅值Bδ1T74空载反电动势E0V五参数计算75线圈平均半匝长l zl BcmdcmτycmsinαcosαC s76双层线圈端部轴向投影长f dcm77定子直流电阻R1ΩρΩ.mm2/mS1mm2d1mm78漏抗系数C x79定子槽比漏磁导λS1查第2章附录2A-3得K u1K L1λu1λL 1与假设值误差小于1%,不用重复计算80定子槽漏抗X s181定子谐波漏抗X d1Ω查第2章附录2A-4得ΣS82定子端部漏抗X e1Ω83定子斜槽漏抗X sk1Ω84定子漏抗X1Ω85直轴电枢磁动势折算系数K ad 86交轴电枢磁动势折算系数K aqK q87直轴电枢反应电流X adΩE dVI1dAF adA f1adb madΦδadW b88直轴同步电抗X dΩ89交轴磁化曲线(X aq-Iq)计算六工作性能计算90转矩角θ°91假定交轴电流I1q A92交轴电枢反应电抗X aqΩ见P428页表10-1 Xaq-Iq曲线93交轴同步电抗X qΩ94输入功率P1kwSINθSIN2θCOSθ95直轴电流I d A96交轴电流I q A97功率因数cosφ°ψ°φ°98定子电流I1A99负载气隙磁通ΦδW bEδV 100负载气隙磁密BδT 101负载定子齿磁密B t1T 102负载转子磁密B j2T 103铜耗P cu1W 104鉄耗(1)定子轭重量G j1kg(2)定子齿重量G t1kg(3)单位铁耗查第2章附录2E-4得p t1w/kgp j1w/kg(4)定子齿损耗P t1W(5)定子轭损耗P j1W(6)总损耗P Fe Wk1k2105杂耗P sP sN kw106机械损耗P fw w107总损耗ΣP kw108输出功率P2kw109效率η%110工作特性见P430表10-2111失步转矩倍数K MT max112永磁体额定负载工作点b mNf1adN113电负荷A1A/cmλ1n114电密J1A/mm2115热负荷A1J1(A/cm)(A/mm2)116永磁体最大去磁工作点b mhf1adhI adh Alaobusi算例4.00003.0000360.0000207.846096926.50003.00000.89601.00007.15960155253072.07547170.052314.814.74.8191919.10.9518.053667.7453333330.350.080.680.091.060.443213841.539699259 .4mm/1.46mm,并绕根数N1=11.0449520.20.1572481.150.030.887704 76.8400277610.82 6.4511733330.832911-0.121.22801.13216923-0.12856.544 1.0523700751.26E-063.61.219136.81.290888889 1.678155556 0.9808257135 0.932879761 0.965960169302 0.965753860.8333333331.2300402670.9406348791.2448267171.30.87 0.010365012 0.8411970220.02 1101.610936 833.7137955 1.2966666670.6405444441.793880386233.490 2.576666667 5.344105556 1.114305729 12.980832390.71.735 1.211871535 1347.991769 1080.094628 7.68922E-06 1.50683E-065.1029296776.63380858 1.5308789030.869003789 %,不用重复计算1.034706209201.529426831.682915872327.2568888890.5490852490.8357663494.3414579342.3838305111.7158936780.02171.53861.48.21E-010.9608659780.870.9050.403328710.6744.69E-016.28E-010.02051.65E-015.31E-011.63E+00 0.812981515 0.3251926060.4 6.558622511 193.4528014 1.231451467 158.2920937 0.011846361 0.858709257 0.0099496178.19E+0026.656.312.19根据I1q查表10-1得1.38E+014.44E+000.4483284510.8014937140.8938688943.25E+006.34E+000.9999593942.72E+01-5.17E-017.1248912060.010084516196.07567680.8184327131.7453347461.084150606261.317264623.264103534.2097075396.22.17 26.10018674 50.48310465 166.21667622.52 19.806546740.0227.9841 0.4753245883.97E+008.93E+010.18536125713.360.8611346311.04E-02 176.61978556.643 4.630762516 817.884282 0.4683161174.61E-014.79E+01。
U N2=I N2=P N2=20003000转/分钟p=20m=1U 2/U υ=U υ/U 2=永磁同步发电机设算程序一:主要技术指标:1,直流额定输出:2,升速器传动比:i=i 1,i 2…=3,电机额定转速:n y =in s =4,极对数及相数:二:计算数据:5,整流线路计算数据采用三相桥式整流:三:转子尺寸确定:9,电枢外径:V,M=54.4KP,σ×10000/(fB r H c Kυ)=cm30.51磁钢计算长度(外转子)磁钢横截面积计算四:转子尺寸确定:五:电枢绕组:21,绕组形式:选用双层、叠绕、整距绕组、直槽铁芯(1)磁极漏磁导(2)当转子在自由状态下的附加漏磁导本例题只考虑无极靴星形转子,故不计(1)气隙系数(2)轭部磁路计算长度(3)电枢绕组每相有效匝数六:转子漏磁导:29,无极靴星形转子:λσm =Kσm *λ'σm 式中λ'σm=(5*l M h M /τ-b M +h M υβ其中,由图9-3按 h M /τ-b M ,查的υβ=l'i =π( Di+h j )/2pWef=W 1*Kdp31和33~42计算空载特性(见表9-2)43~44略八:电枢绕组参数:由图9-4按ξ*ξ=h M *λ'σm/μm*b M *100,查的K σm =λa d =4l M *Φv1*10-8=30,有极靴星形转子:七:空载特性:32,气隙系数、轭部磁路计算长度和电枢绕组每相有效匝数K σ(45)绕组尺寸l E=KEπ Di+h j)/2p=。
永磁同步电动机调速控制系统的设计摘要:永磁同步电动机调速控制系统是现代工业中的重要组成部分,它能够实现电动机的高效、精确的调速控制,满足各种工业应用领域的需求。
本文介绍了永磁同步电动机调速控制系统的设计原理和方法,包括永磁同步电动机的原理和特点、调速控制系统的整体构架和关键部件、控制算法和调速策略等内容,并结合实际案例进行了具体分析和验证。
关键词:永磁同步电动机;调速控制系统;整体构架;控制算法;调速策略引言永磁同步电动机由于具有高效、高功率密度、小体积、快速响应等优点,已经成为工业领域中最受欢迎的电动机之一。
它在各种工业应用中得到了广泛应用,如风力发电、电动汽车、机械制造等领域。
永磁同步电动机的调速控制对于其性能和稳定运行至关重要,因此需要设计一个高效、精确的调速控制系统。
一、永磁同步电动机的原理和特点永磁同步电动机由定子和转子组成。
定子上有三相绕组,可以通过变频器提供三相交流电源。
转子上装有永磁体,通过永磁体和定子绕组之间的磁场相互作用来实现电动机的转动。
永磁同步电动机的工作原理是利用永磁体和定子绕组之间的磁场相互作用。
当给定定子绕组施加三相交流电源时,会在定子绕组中产生一个旋转磁场。
而转子上的永磁体也会产生一个恒定的磁场。
当这两个磁场相互作用时,就会产生电动机的转动力矩,从而实现电动机的转动。
永磁同步电动机具有高效、高功率密度、小体积、快速响应等特点。
它具有高效,因为永磁体本身具有较高的磁能密度,可以在较小体积内产生较大的磁场,从而实现高效的能量转换。
它具有高功率密度,因为永磁体本身具有较高的磁能密度,可以在较小体积内产生较大的磁场,从而实现高功率输出。
它具有小体积,因为永磁体本身具有较高的磁能密度,可以在较小体积内产生较大的磁场,从而实现小型化设计。
它具有快速响应,因为永磁同步电动机的转子上装有永磁体,可以实现快速响应和高动态性能。
1.调速控制系统的整体构架永磁同步电动机调速控制系统通常由传感器、控制器、功率器件等部件组成。
永磁同步电动机电磁计算程序序号名称公式单位一额定数据1额定功率P Nkw2相数m13额定线电压U N1V 额定相电压U NV4额定频率?Hz5极对数p6额定效率η1N%7额定功率因数cosυ1N8额定相电流I NA9额定转速n Nr/min10额定转矩T NN.m11绝缘等级B级12绕组形式双层二主要尺寸13铁芯材料50W470硅钢片14转子磁路结构形式15气隙长度δcm16定子外径D1cm17定子内径D i1cm永磁同步电动机电磁计算程序以下公式中π取值为3.1418转子外径D2cm19转子内径D i2cm20定、转子铁心长度l1=l2cm21铁心计算长度la=l1cm铁心有效长度l effcm铁心叠压系数K fe净铁心长l Fecm22定子槽数Q1 23定子每级槽数Q p1 24极距τp 25定子槽形梨形槽b s0cmcmb s1cmh s1cmh s2cmrcm26每槽导体数N s1 27并联支路数a1 28每相绕组串联导体数NΦ129绕组线规N11S11mm230槽满率根据N11S11=1.54mm2,线径取d1/d1i=1.4mm/1.46mm,并绕根数N1(1)槽面积s scm2槽楔厚度hcm(2)槽绝缘占面积s icm2h1scm绝缘厚度C icm(3)槽有效面积s e(4)槽满率sf% N1三永磁体计算31永磁材料类型铷铁棚32永磁体结构矩形33极弧系数a p34主要计算弧长b1pcm35主要极弧系数a1p 36永磁体Br温度系数a Br永磁体剩余磁通密度B r20T温度t℃t=80℃时剩余磁通密度B rT37永磁体矫顽力H c20KA/m永磁体H c温度系数a Hct=80℃时矫顽力Hc KA/m 38永磁体相对回复磁导率u ru0H/m39最高工作温度下退磁曲线的拐点b k40永磁体宽度b m41永磁体磁化方向厚度h Mcm42永磁体轴向长度l Mcm43提供每级磁通的截面积S M cm2四磁路计算44定子齿距t1cm45定子斜槽宽b skcm46斜槽系数K sk147节距y48绕组系数K dp1(1)分布系数K d1α°q1(2)短距系数K p1β49气隙磁密波形系数K f50气隙磁通波形系数KΦ51气隙系数Kδ52空载漏磁系数σ053永磁体空载工作点假设值b1m054空载主磁通Φδ0Wb55气隙磁密Bδ056气隙磁压降δ12cm直轴磁路FδA交轴磁路Fδq 57定子齿磁路计算长度h1t1 58定子齿宽b t159定子齿磁密B t10T60定子齿磁压降F t1A查第2章附录图2E-3得H t10 A/cm61定子轭计算高度h1j1cm62定子轭磁路计算长度l1j1 cm63定子轭磁密B j10T64定子轭磁压降F j1查第2章附录图2C-4得C1查第2章附录图2E-3得H j10 A/cm65磁路齿饱和系数K t66每对极总磁压降ΣF adAΣF aqA67气隙主磁导ΛδH68磁导基值ΛbH69主磁导标幺值λδ70外磁路总磁导λ1H71漏磁导标幺值λσ72永磁体空载工作点b m073气隙磁密基波幅值Bδ1T74空载反电动势E0V五参数计算75线圈平均半匝长l zl BdcmτycmsinαcosαC s76双层线圈端部轴向投影长f d cm77定子直流电阻R1ΩρΩ.mm2/mS1mm2d1mm78漏抗系数C x79定子槽比漏磁导λS1查第2章附录2A-3得K u1K L1λu1λL 1与假设值误差小于1%,不用重复计算80定子槽漏抗X s181定子谐波漏抗X d1Ω查第2章附录2A-4得ΣS82定子端部漏抗X e1Ω83定子斜槽漏抗X sk1Ω84定子漏抗X1Ω85直轴电枢磁动势折算系数K ad 86交轴电枢磁动势折算系数K aqK q87直轴电枢反应电流X adΩE dVI1dAF adA f1adb madΦδadW b88直轴同步电抗X dΩ89交轴磁化曲线(X aq-Iq)计算六工作性能计算90转矩角θ°91假定交轴电流I1q A92交轴电枢反应电抗X aqΩ见P428页表10-1 Xaq-Iq曲线93交轴同步电抗X qΩ94输入功率P1kwSINθSIN2θCOSθ95直轴电流I d A 96交轴电流I q A 97功率因数cosυ°ψ°υ°98定子电流I1A99负载气隙磁通ΦδW bEδV 100负载气隙磁密BδT 101负载定子齿磁密B t1T 102负载转子磁密B j2T 103铜耗P cu1W 104鉄耗(1)定子轭重量G j1kg(2)定子齿重量G t1kg(3)单位铁耗查第2章附录2E-4得p t1w/kgp j1w/kg(4)定子齿损耗P t1W(5)定子轭损耗P j1W(6)总损耗P Fe Wk1k2105杂耗P sP sN kw106机械损耗P fw w107总损耗ΣP kw108输出功率P2kw109效率η%110工作特性见P430表10-2111失步转矩倍数K MT max112永磁体额定负载工作点b mNf1adN113电负荷A1A/cmλ1n114电密J1A/mm2115热负荷A1J1(A/cm)(A/mm2)116永磁体最大去磁工作点b mhf1adhI adh Alaobusi算例4.00003.0000360.0000207.846096926.50003.00000.89601.00007.15960155253072.07547170.052314.814.7191919.10.9518.053667.7453333330.350.080.680.091.060.443213841.539699259 .4mm/1.46mm,并绕根数N1=1 1.0449520.20.1572481.150.030.887704 76.8400277610.82 6.4511733330.832911-0.121.221.13216923-0.12856.544 1.0523700751.26E-063.61.219136.81.290888889 1.678155556 0.9808257135 0.932879761 0.965960169302 0.965753860.8333333331.2300402670.9406348791.2448267171.30.87 0.010365012 0.8411970220.02 1101.610936 833.7137955 1.2966666670.6405444441.793880386233.490 2.576666667 5.344105556 1.114305729 12.980832390.71.735 1.211871535 1347.991769 1080.094628 7.68922E-06 1.50683E-065.1029296776.63380858 1.5308789030.869003789 %,不用重复计算1.034706209201.529426831.682915872327.2568888890.5490852490.8357663494.3414579342.3838305111.7158936780.02171.53861.48.21E-010.9608659780.870.9050.403328710.6744.69E-016.28E-010.02051.65E-015.31E-011.63E+00 0.812981515 0.3251926060.4 6.558622511 193.4528014 1.231451467 158.2920937 0.011846361 0.858709257 0.0099496178.19E+0026.656.312.19根据I1q查表10-1得1.38E+014.44E+000.4483284510.8014937140.8938688943.25E+006.34E+000.9999593942.72E+01-5.17E-017.1248912060.010084516196.07567680.8184327131.7453347461.084150606261.317264623.264103534.2097075396.22.17 26.10018674 50.48310465 166.2166762 2.52 19.806546740.0227.9841 0.4753245883.97E+008.93E+010.18536125713.360.8611346311.04E-02 176.61978556.643 4.630762516 817.884282 0.468316117 4.61E-01。
变频调速永磁同步电动机的设计随着科技的不断发展,变频调速技术日益成为工业领域中重要的节能技术之一。
变频调速技术通过改变电源频率,实现对电动机的速度控制。
在众多类型的电动机中,永磁同步电动机因其高效、节能、高精度控制等优点,逐渐得到广泛应用。
本文将探讨变频调速永磁同步电动机的设计方法。
变频调速技术主要通过改变电源频率来改变电动机的转速。
根据异步电动机的转速公式 n=f(1-s)/p,其中n为转速,f为电源频率,s为转差率,p为极对数,可知当f改变时,n也会相应改变。
变频调速技术具有调速范围广、精度高、节能等优点,被广泛应用于各种工业领域。
永磁同步电动机是一种利用永磁体产生磁场的高效电动机。
其特点如下:效率高:永磁同步电动机的磁场由永磁体产生,可降低铁损和额定负载下的铜损,从而提高效率。
节能:由于其高效率,永磁同步电动机在长期运行中可节省大量能源。
调速性能好:永磁同步电动机的转速与电源频率成正比,因此可通过变频调速技术实现对电动机的速度精确控制。
维护成本低:永磁同步电动机结构简单,故障率低,维护成本相对较低。
变频调速永磁同步电动机的设计原则是在满足额定负载要求的前提下,尽可能提高电动机效率,同时确保调速性能优越。
为此,设计时需考虑以下几个方面:(1)优化电磁设计:通过合理选择永磁体的尺寸和位置,以及优化定子绕组的设计,降低铁损和铜损。
(2)转子结构设计:保证转子的强度和稳定性,同时考虑散热问题,防止因转子故障导致电动机损坏。
(3)控制系统设计:选择合适的控制算法和硬件设施,实现对电动机速度的精确控制。
(1)明确设计需求:根据应用场景和负载要求,确定电动机的功率、转速、电压、电流等参数。
(2)选择合适的永磁材料:根据需求和市场供应情况,选择合适的永磁材料,如钕铁硼等。
(3)设计定子结构:根据电磁负荷要求,设计定子的槽数、绕组形式等结构参数。
(4)优化转子设计:根据强度和稳定性要求,设计转子的结构形式,选择合适的材料和加工工艺。