汽车倒车雷达预警系统设计 中期检查
- 格式:doc
- 大小:30.50 KB
- 文档页数:2

万方数据隰鲢淀黧得到褥、院貌塞关涮汽车电子器发出40kHz的脉冲超声波。
当超声波遇到障碍物发生反射,3.2报警与显示反射波f回波1返回到超声波传感器上。
反射回的正弦波信号经微处理器直接控制声光报警电路和LCD显示电路。
LCD过放大、滤波、整形后输入单片机的IN哟,产生中断。
尽管发射液晶屏上以数字的形式显示汽车与障碍物的距离,用“嘀”声的部分的脉冲电压比较高。
但是由回波触发的接收压电晶片在近不同频率来提示车尾与障碍物远近的危险程度。
当障碍物距离距离时产生毫伏级的射频电压信号,在远距离时更小。
因此在汽车尾部2.5m时。
开始有报警信号,但信号间隔时间长,“嘀”距离较远的情况下回波很弱,转换为电信号的幅值也较小,为的声音舒缓,指示条亮绿灯,随着距离的缩短,信号问隔的时间此需将该回波信号放大几千倍。
信号经放大、整形后,电路产生也缩短,在1.5m处,“嘀”的声音由舒缓逐渐为急促,指示灯亮一个负脉冲使微处理器产生中断。
黄灯;在1.0m处,“嘀”的声音变得短而急促,指示灯亮红灯;当发送与接收电路原理图如图3所示。
液晶屏上显示0.5m时,屏幕上的数据不再变化,“嘀”的声音变:微处理器:l………●图2汽车倒车雷达预警系统原理图=微处理器图3发送与接收电路原理图电路原理图信号仿真结果如图4,图5所示。
图4超声波发送接收信号仿真图5单片机接收信号仿真成长鸣。
指示灯亮红灯且不停闪烁.再次警告驾驶者避免距离过小而来不及采取措施。
显示部分用一块16"2的字符型LCD模块,它的读写操作、屏幕和光标的操作都是通过指令编程来实现的。
在该系统中,它主要是用来显示开机画面.显示障碍物体与车尾的距离。
液晶屏显示结果如图6所示:图6液晶显示器显示结果5软件设计倒车雷达预警系统软件流程图如图7所示。
圈图7软件主程序流程图国营自控搠邮局订阅号:82_946360_7L/_269—万方数据 万方数据可视汽车倒车雷达预警系统设计作者:袁佑新, 吴妍, 刘苏敏, 卢曰万, YUAN YOUXIN, WU YAN, LIU SUMIN, LU YUEWAN 作者单位:430070,武汉,武汉理工大学西院自动化学院刊名:微计算机信息英文刊名:EMBEDDED SYSTEM & SOC年,卷(期):2007,23(5)被引用次数:4次1.金濠芷.王明时现代传感器技术 19952.袁希光传感器技术工册 19963.张友德.赵志英.涂时亮单片微型计算机原理与试验 20004.赵广涛.程荫杭基于超声波传感器的测距系统设计[期刊论文]-微计算机信息 2006(01)1.吴琼.封维忠.马文杰汽车倒车雷达系统的设计与实现[期刊论文]-现代电子技术 2009(9)2.陶志文.李斌一种基于无线CCD的汽车倒车辅助系统[期刊论文]-微计算机信息 2009(8)3.杜晓.ZHANG Chong-xiong基于SOPC技术的车辆电子后视镜系统设计[期刊论文]-微计算机信息 2008(23)4.谭进怀.冯地耘.陈立万超声波语音测距系统在车辆避障中的应用[期刊论文]-微计算机信息 2008(2)本文链接:/Periodical_wjsjxx200705109.aspx。

毕业论文课题:汽车倒车雷达设计专业学生姓名班级学号指导教师完成日期摘要随着社会经济的发展和交通运输业的不断兴旺,汽车的数量在不断的增加。
交通拥挤状况也日益严重,撞车事件也经常发生,造成了很多不可避免的人声伤亡和经济损失,面对这种情况,设计一种响应快、可靠性高并且比较经济的汽车防撞预警系统显得非常的重要。
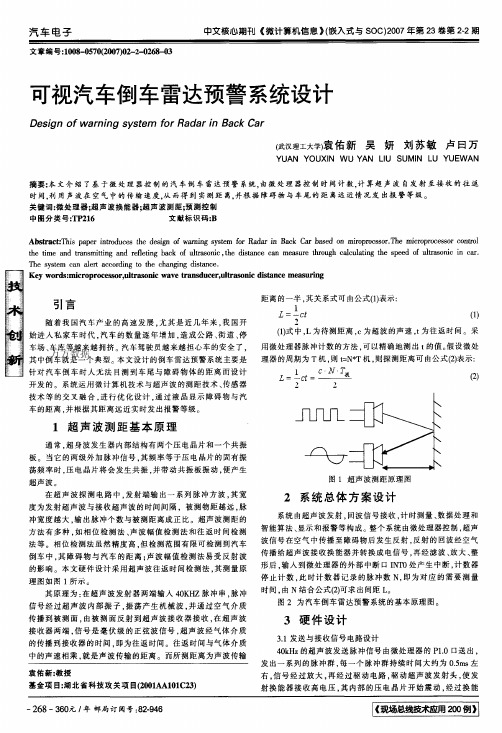
超声波测距法是一种最常见的距离测量方法。
本文介绍的就是利用超声波测距法设计一种倒车防撞报警系统。
本文的内容是基于超声波测距的倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和AT89S51单片机结合于一体,设计出一种基于AT89S51单片机得倒车防撞系统。
本系统采用软硬结合的方法,具有模块化和多用化的特点。
论文概述了超声波检测的发展及基本原理,阐述了超声波传感器的原理及特性。
对于系统的一些主要参数进行了讨论,并且在介绍超声波测距系统功能的基础上,提出了系统的总体构成。
通过多种发射接收电路设计方案比较,得出了最佳设计方案,并对系统各个设计单元的原理进行了介绍。
对组成各系统电路的芯片进行了介绍,并阐述了它们的工作原理。
论文介绍了系统的软件结构,通过编程来实现系统功能。
目录摘要 (I)目录........................................................................................................................... I I 第一章绪论.. (1)1.1 课题设计的目的和意义 (1)1.2 国内应用现状 (1)第二章总体方案 (3)2.1 本设计的研究方法 (3)2.2系统整体方案的设计 (3)2.3 系统整体方案的论证 (3)第三章系统硬件设计 (4)3.1 AT89S51单片机 (4)3.2超声波测距的系统及其组成 (5)3.2.1 超声波测距单片机系统 (6)3.2.2 超声波发射、接受电路 (6)3.3.3 显示电路 (8)3.3.4 供电电路 (8)3.2.5 报警输出电路 (9)第四章系统软件设计 (10)4.1 主程序设计 (10)4.2 超声波测距子程序及其流程图 (10)4.3 超声波测距流程图 (13)第五章系统调试 (14)5.1调试步骤 (14)我的错误与纠正 (14)调试准备 (14)5.2 调试现象 (17)结论 (19)参考资料 (20)致谢 (21)附录一超声波测距原理图 (21)附录二PCB图 (22)附录三实物图 (23)第一章绪论1.1 课题设计的目的和意义随着汽车的普及,越来越多的家庭拥有了汽车。

武汉理工大学硕士学位论文汽车倒车雷达预警系统研究姓名:吴妍申请学位级别:硕士专业:控制理论与控制工程指导教师:袁佑新20070401摘要本文研究了‘种汽车倒车雷达预警系统。
该系统在常见的汽车倒车预警装置的基础上采用计算机控制技术和超声波测距技术,通过显示障碍物与汽车的距离并根据其距离远近实时发出报警,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,提高了驾驶安全性。
本文在研究汽车倒车雷达预警系统过程中,运用理论分析、电路设计和计算机仿真等研究手段,完成了倒车雷达预警系统硬件和软件的设计,采用了模糊控制算法,进行了系统的计算机仿真。
本文在查阅、分析国内外倒车雷达系统相关技术的基础上,结合最新研究成果,对基于超声波测距的倒车雷达预警系统的研制进行了深入探讨和研‘究。
该系统分为测距模块、系统控制模块和显示报警模块,并分别对其进行方案分析,构建了倒车雷达预警系统的系统构架和设计方案;在硬件电路中,详细阐述了运用单片机技术实现的可视倒车雷达预警系统的测距实现原理,分析了以AT89S52单片机为主控单元的系统硬件和软件设计,并对该系统进行了试验和误差分析,给出了本系统的稳定性指标。
试验结果显示,该系统对室内有限距离的距离测量具有较高的精度,实现了倒车提示和距离报警功能,其主要技术指标达到了系统设计要求,并通过系统仿真研究,验证了系统的可靠性和可行性。
关键词:倒车雷达,超声波测距,模糊控制,系统仿真第1章绪论1.1课题概述1.1.1课题的题目及来源课题的题目:汽车倒车雷达预警系统研究课题来源:企业预研究项目1.1.2课题研究的背景随着中国经济的持续增长和汽车价格的持续下降,越来越多的家庭拥有自己的汽车。
在享受汽车给我们带来的便利同时,由于倒车而产生的问题也日益突出。
一方面汽车的数量逐年增加,公路、街道、停车场和车库拥挤不堪,可转动的空间越来越少;。
另一方面,新司机及非专职司机越来越多,因倒车引起的纠纷越来越多,车辆之间、车辆与人、车辆与墙壁等障碍物之间的碰撞时有发生。

万方数据隰鲢淀黧得到褥、院貌塞关涮汽车电子器发出40kHz的脉冲超声波。
当超声波遇到障碍物发生反射,3.2报警与显示反射波f回波1返回到超声波传感器上。
反射回的正弦波信号经微处理器直接控制声光报警电路和LCD显示电路。
LCD过放大、滤波、整形后输入单片机的IN哟,产生中断。
尽管发射液晶屏上以数字的形式显示汽车与障碍物的距离,用“嘀”声的部分的脉冲电压比较高。
但是由回波触发的接收压电晶片在近不同频率来提示车尾与障碍物远近的危险程度。
当障碍物距离距离时产生毫伏级的射频电压信号,在远距离时更小。
因此在汽车尾部2.5m时。
开始有报警信号,但信号间隔时间长,“嘀”距离较远的情况下回波很弱,转换为电信号的幅值也较小,为的声音舒缓,指示条亮绿灯,随着距离的缩短,信号问隔的时间此需将该回波信号放大几千倍。
信号经放大、整形后,电路产生也缩短,在1.5m处,“嘀”的声音由舒缓逐渐为急促,指示灯亮一个负脉冲使微处理器产生中断。
黄灯;在1.0m处,“嘀”的声音变得短而急促,指示灯亮红灯;当发送与接收电路原理图如图3所示。
液晶屏上显示0.5m时,屏幕上的数据不再变化,“嘀”的声音变:微处理器:l………●图2汽车倒车雷达预警系统原理图=微处理器图3发送与接收电路原理图电路原理图信号仿真结果如图4,图5所示。
图4超声波发送接收信号仿真图5单片机接收信号仿真成长鸣。
指示灯亮红灯且不停闪烁.再次警告驾驶者避免距离过小而来不及采取措施。
显示部分用一块16"2的字符型LCD模块,它的读写操作、屏幕和光标的操作都是通过指令编程来实现的。
在该系统中,它主要是用来显示开机画面.显示障碍物体与车尾的距离。
液晶屏显示结果如图6所示:图6液晶显示器显示结果5软件设计倒车雷达预警系统软件流程图如图7所示。
圈图7软件主程序流程图国营自控搠邮局订阅号:82_946360_7L/_269—万方数据万方数据。
毕业论文﹙设计﹚题目汽车倒车雷达预警系统的设计及实现学生姓名王阳学号1213024108 所在学院物理与电信工程学院专业班级通信1204班指导教师张文丽完成地点陕西理工学院2016年6月5日毕业论文﹙设计﹚任务书院(系) 物理与电信工程学院专业班级通信1204 学生姓名王阳一、毕业论文﹙设计﹚题目汽车倒车雷达预警系统的设计及实现二、毕业论文﹙设计﹚工作自__2015 __年__ 12 _月__ 日起至_ 2016__年 6 月日止三、毕业论文﹙设计﹚进行地点: 物电学院实验室四、毕业论文﹙设计﹚的内容要求:1、本次毕业设计要求如下:设计一个汽车倒车雷达预警系统,要求:⑴该系统可实现汽车倒车时车尾保险杠和障碍物之间的测距,并能够实时显示;⑵系统可预设测距报警的下限值,当实际测距小于预设值时,系统应报警提示,同时可实现对预设值的调整和修改;⑶报警方式要求有两种以上,以更好地提示驾驶员车辆周边的情况,从而提高汽车倒车的安全性。
2、毕业设计成果要求:程序代码、硬件实物和论文,论文要求计算机打印(A4纸),论文有不少于3000词的相关英文中文翻译。
3、毕业设计时间安排:1—4周:查阅相关资料,熟悉题目内容,掌握设计原理,提交开题报告;5—10周:根据设计原理,进行相应软、硬件设计;11—12周:完善设计功能,整理资料并进行结果测试及分析;13—14周:毕业设计验收;15—16周:撰写、修改、提交毕业论文,毕业答辩。
指导教师系(教研室)系(教研室)主任签名批准日期接受论文 (设计)任务开始执行日期学生签名汽车倒车雷达预警系统的设计及实现王阳(陕西理工学院物理与电信工程学院通信工程专业1204班,陕西汉中 723001)指导教师:张文丽[摘要]汽车倒车雷达预警系统能在汽车倒车时为驾驶员提供周围障碍物信息,可降低倒车难度,避免驾驶员因方向感不强、判断和操作失误而引起的事故。
本课题设计了一个汽车倒车雷达预警系统,倒车时,驾驶者启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇障碍物产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出语音警示信号,以提示驾驶员车辆周边的情况,从而提高汽车倒车的安全性。
10.16638/ki.1671-7988.2019.22.044汽车倒车预警系统的设计张琦(德州学院汽车工程学院,山东德州253023)摘要:本设计主要是以A T89C51单片机为控制器,HC-SR04超声波模块作为信号收发器,对汽车倒车预警系统进行了设计。
传感器接收信号传输给信号处理模块,计算超声波在汽车与障碍物之间的往返时间,得到实际距离。
此系统实现了汽车与障碍物距离的显示、危险距离的预警等功能,降低倒车时的事故发生率。
关键词:倒车预警系统;超声波;信号处理中图分类号:U462.1 文献标识码:A 文章编号:1671-7988(2019)22-127-02The Design of Car Reversing Warning SystemZhang Qi( Department of Automotive Engineering, Dezhou University, Shandong Dezhou 253023 )Abstract:The design is mainly based on A T89C51, HC-SR04 ultrasonic module as the signal transceiver. The sensor receives the signal and transmits it to the signal processing module to calculate the round-trip time of ultrasonic wave between the car and the obstacle and get the actual distance. This system can display the distance between the car and the obstacle and warn the danger distance, so as to reduce the accident rate when reversing.Keywords: Reversing warning system; Ultrasound; Signal processingCLC NO.: U462.1 Document Code: A Article ID: 1671-7988(2019)22-127-02前言车辆的不断增多造成了交通拥堵以及停车位的不足,汽车在倒车时极易引发碰撞,同时倒车的失误会引发甚多交通事故的发生。
汽车倒车防撞雷达系统设计摘要:本文在查阅分析了现有的几种不同测距原理后,确定了使用超声波测距,并对基于超声波测距的倒车雷达报警系统的设计进行了深入分析和研究。
该系统分为系统控制模块、超声波发射模块、超声波接受模块、温度采集模块和液晶显示及声光报警模块。
在硬件电路中,详细阐述了运用单片机技术实现的倒车雷达报警系统的测距实现原理,分析了以ATMEGA16单片机为主控单元的硬件系统和软件设计,并分别对每个模块进行了分析,使我们对该系统由较好的认识和理解。
关键词:倒车雷达超声波测距1 概述在现代社会中,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时汽车倒车防撞报警系统就成了汽车的好助手。
汽车倒车防撞报警系统是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。
本系统以ATMEGA16作为核心处理器,采用超声波原理测量出障碍物距车尾的垂直距离。
系统硬件原理图如图1.1:图1.1 倒车雷达报警系统框图该系统整体设计思路如下:警报系统装于汽车尾部,与汽车倒车闸相连,当汽车倒车时,该报警系统开始工作。
ATMEGA16单片机为主控模块,将各个子模块联系起来共同工作,当超声波模块发出脉冲信号时,主控模块内部计数器开始工作。
超声波接收模块接到障碍物反射回来的声波后将信号传递给主控模块,主控模块内部的计数器计数停止,从而得到声波往返所用时间。
温度采集模块不断测试环境温度,并将此信息传递给主控模块。
主控模块根据温度得出此时超声波速度,进而计算出此时汽车尾部与障碍物的距离。
主控模块距离信息传递给液晶显示模块和声光报警模块,使液晶显示屏显示当前车尾与障碍物的距离,同时控制声光报警模块,当距离小于设定值时发出声光警报,从而提醒司机注意,防止倒撞。
2 系统硬件电路设计系统电路主要由三大部分组成:(1)超声波发射接收模块;(2)ATMEGA16单片机主控模块;(3)距离显示模块和声光报警模块。