机械毕业设计1503校园垃圾拾捡机构行走机构设计说明书
- 格式:doc
- 大小:1019.50 KB
- 文档页数:27
图书分类号:密级:毕业设计(论文)垃圾捡拾机器人控制结构设计GARBAGE PICK-UP ROBOT CONTROL ARCHITECTURE DESIGN学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日学位论文版权协议书本人完全了解关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归所拥有。
有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要现今社会的公共卫生的保持还是需要消耗大量的人力,如果通过机器人来完成城市清洁的工作,就可以解放大量的劳动力。
在研究了垃圾捡拾机器人的情况之后,可以知道这种机器人的发展趋势是非常不错的,有着很高的研究价值。
本文主要对垃圾捡拾机器人的控制结构进行了研究。
通过查找文献,了解了机器人发展的状况与趋势,然后再对控制结构进行分析与设计。
这样我们就能够利用控制系统使机器人做到远程自动控制,大大的节约了社会资源,创造了丰富的价值。
关键词垃圾捡拾机器人;液压控制;PLC控制AbstractModern society to maintain public health or the need to consume a lot of manpower, if the city clean work done by a robot, you can liberate a lot of labor. After studying the situation of garbage pick up the robot, the robot can know the trends are very good, has high research value.In this paper, garbage pick-up robot control structure were studied. By looking for literature, to understand the situation and development trend of the robot, and then control structure analysis and design. So that we can use the remote control system enables the robot to achieve automatic control, greatly saving social resources, to create a rich value.Keywords Garbage pick-up robot Hydraulic control PLC control全套图纸外文文献扣扣1411494633目录1 绪论 (1)1.1概述 (1)1.1.1课题研究的背景和意义 (1)1.1.2移动机器人的发展与应用 (1)1.1.3主要研究内容与研究方法 (2)1.2垃圾捡拾机器人的运行框图 (3)2 垃圾捡拾机器人方案设计与选择 (4)2.1捡拾机构设计 (4)2.1.1方案一:铲斗车型结构 (4)2.1.2方案二:机械手抓取型结构 (4)2.1.3方案三:旋转毛刷收集机构 (5)2.1.4捡拾方案的确定 (5)2.2移动形式的确定 (5)3 机器人工作过程简单分析与机械臂机构设计 (6)3.1工作过程简单分析 (6)3.1.1垃圾捡拾机器人驱动的简单分析 (6)3.1.2捡拾机器人的机械手的工作分析 (6)3.1.3机器人支撑座 (7)3.2机械臂的机构设计 (7)3.2.1机械臂机构的设计要求 (7)3.2.2机械臂机构的具体设计 (7)4 液压控制环节 (9)4.1液压控制的优点 (9)4.2液压系统控制油路图 (10)4.3液压系统油缸选型 (11)4.3.1摆动液压缸的选型 (11)4.3.2手臂1与2的液压缸选型 (12)4.3.3机械手手爪活塞缸选型 (13)4.4液压泵的选型 (14)4.5系统校核 (16)4.6液压系统其他元件的选择 (19)5 机器人的控制机构设计 (20)5.1PLC控制 (20)5.2机械手的控制 (20)5.3驱动系统的控制 (23)总结 (26)致谢 (27)参考文献 (27)1 绪论1.1概述1.1.1课题研究的背景和意义虽然现在的社会是一个全民素质不断提高的社会,但是还是会存在一些随地乱扔垃圾的现象,还有生活垃圾的胡乱摆放的问题。
北京机械工业学院毕业设计说明书题目:垃圾转运站及设备设计研究(总体规划,及各种新型环保装置设计)系别:机械工程系专业、班级:机械设计制造及自动化、机9906班姓名:戴瑛指导教师:王科社起止日期:2003-02-24~2003-06-27一、设计(论文)要求:随着垃圾比重的减轻,运输距离的增加,垃圾的压缩转运是城市必须考虑的问题。
传统的垃圾运输方式使运输车额定载重量空耗,据测定5t级的自卸车只能装载2.4t左右的垃圾,少数仅载0.5~0.6t,冬季还存在垃圾在箱内冻结的情况,造成垃圾倾倒不彻底,严重影响垃圾清运效率。
这样完成相同的运量只有不断增加车数量或加班次,造成人力,物力浪费。
因此各城市都希望能建设新的、先进的、高效的垃圾转运站。
按照生活垃圾处理“减量化、无害化、资源化”的原则,转运站作为垃圾处理的重要环节之一,其主要目的就是保护城市环境卫生,缓解城市交通拥挤状况,减少生活垃圾运输费用,实现垃圾减量化,资源化并为垃圾无害化处理提供服务。
新的、先进的、高效的垃圾转运站应具有以下功能:1)有较高运转能力,如日处理在500吨到2000吨;2)能解决在处理转运垃圾过程中的二次污染问题,且采用多重保护措施;3)能对生活垃圾进行压缩(实)、减容,能分类收集分类转运,封闭性好,其飘尘、噪声、臭气、排水等指标应符合环境监测标准;4)自动化程度高。
垃圾转运站及设备的研究内容主要有:1)垃圾在转运站的分类技术研究;2)解决转运垃圾过程中的二次污染问题的技术研究;3)装载技术研究;4)设备的自动化技术,可靠的液压技术研究;5)垃圾转运站及设备的虚拟设计研究;6)垃圾的压缩(实)、减容技术研究;6)为增强设备抗垃圾腐蚀的能力,延长设备的使用寿命,所进行的设备零件化学防腐处理和表面喷涂技术研究;8)与垃圾转运站相关的转运车和垃圾收集车的研究;9)垃圾转运站及设备的标准化研究10)垃圾转运站外观的美化等。
作为毕业设计对垃圾转运站的设计,要求同学在了解国内垃圾转运站的基础上,设计出性能好,可靠性高,制造容易,安装调试简单,价格低的垃圾转运站。
XX大学城垃圾清运路线设计说明书XX大学城一期工程占地5600亩,建筑面积211万平方米,远景规划面积2万亩。
城内六所院校分别是江苏工业学院(规模约1万人)、XX信息职业技术学院(规模约1万人)、XX纺织服装职业技术学院(规模约0.8万人)、XX工程职业技术学院(规模约1万人)、XX轻工职业技术学院(规模约0.8万人)、XX机电职业技术学院(规模约0.8万人),一、二期的总人数为50000人。
XX大学城规划图见图1图1 XX大学城规划图3.垃圾产生量预测估计大学城垃圾的产生量参照城市生活垃圾产生量的通用公式:Y n=y n P n×10-3×365(1-1)式中,Y n为第n年城市生活垃圾生产量,t/a; y n为第n年城市生活垃圾的产率或产出系数,kg/(人·d);P n为第n年城市人口数,人。
由(1-1)式得Y n=y n P n×10-3×265(1-2)式中,Y n为第n年大学城生活垃圾生产量,t/a; y n为第n年大学城生活垃圾的产率或产出系数,kg/(人·d);P n为第n年大学城人口数,人。
265为学生在校的天数。
从(1-2)式不难看出影响大学城生活垃圾产生量的主要因数是大学城垃圾产率和大学城人口数。
其中,大学城垃圾产率受多种因数的影响,而大学城人口数则保持相对稳定的状态。
经课程设计小组的调查研究,得出2004、2005、2006三年内大学城的垃圾产率分别为1.020 kg/(人·d)、1.022 kg/(人·d)、1.030 kg/(人·d)。
考虑到学校的特殊性:大学城人口数则保持相对稳定,生活垃圾的成分相对稳定,产率也基本稳定。
取y n=1.030 kg/(人·d); P n=50000人,得:大学城生活垃圾年生产量:Y n =1.030×50000×265=13647.5 t/a大学城垃圾日产量为:51.5t/d.4.垃圾清运工程规模大学城现用地5600亩,人口数为50000人。
XX大学城垃圾清运路线设计说明书1.概述1.1垃圾清运生活垃圾收运是垃圾处理系统中的一个重要环节,其费用占整个垃圾处理系统的60%~80%。
生活垃圾收运的原则:在满足环境卫生要求的同时,收运费用最低,并考虑后续处理阶段,使垃圾处理系统的总费用最低。
因此,科学合理地制定收运计划是非常关键的。
生活垃圾的收运并非单一阶段操作过程,通常需包括三个阶段。
第一阶段是从垃圾发生源到垃圾桶的过程,即搬运与贮存(简称运贮)。
第二阶段是垃圾的清运(简称清运),通常是指垃圾的近距离运输。
清运车辆沿一定路线收集清除贮存设施(容器)中的垃圾,并运至垃圾转运站,有时也可以就近直接送至垃圾处理处置场。
第三阶段是转运,特指垃圾的远距离运输,即在转运站将垃圾转载至大容量运输工具上,运往远处的处理处置场。
本次课程设计主要是第二阶段的垃圾清运,针对现有的清运线路的调查结果结合专业知识进行最优化处理,在清运环节减低成本。
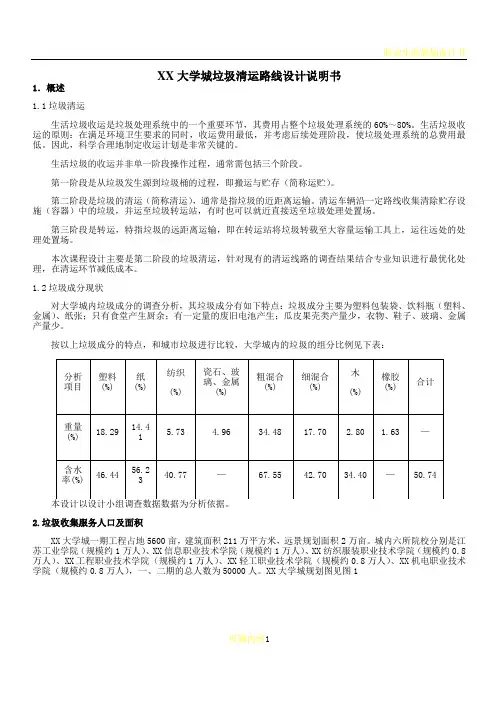
1.2垃圾成分现状对大学城内垃圾成分的调查分析,其垃圾成分有如下特点:垃圾成分主要为塑料包装袋、饮料瓶(塑料、金属)、纸张;只有食堂产生厨余;有一定量的废旧电池产生;瓜皮果壳类产量少,衣物、鞋子、玻璃、金属产量少。
按以上垃圾成分的特点,和城市垃圾进行比较,大学城内的垃圾的组分比例见下表:XX大学城一期工程占地5600亩,建筑面积211万平方米,远景规划面积2万亩。
城内六所院校分别是江苏工业学院(规模约1万人)、XX信息职业技术学院(规模约1万人)、XX纺织服装职业技术学院(规模约0.8万人)、XX工程职业技术学院(规模约1万人)、XX轻工职业技术学院(规模约0.8万人)、XX机电职业技术学院(规模约0.8万人),一、二期的总人数为50000人。
XX大学城规划图见图13.垃圾产生量预测估计大学城垃圾的产生量参照城市生活垃圾产生量的通用公式:Y n=y n P n×10-3×365(1-1)式中,Y n为第n年城市生活垃圾生产量,t/a; y n为第n年城市生活垃圾的产率或产出系数,kg/(人·d);P n为第n年城市人口数,人。
毕业设计(论文)垃圾捡拾机器人控制结构设计GARBAGE PICK-UP ROBOT CONTROL ARCHITECTURE DESIGN毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
摘要校园垃圾拾捡机构是为了保持校园环境清洁而设计的一种由抓取机构固定在行走机构上构成的一类的小车机器人的专门工作机构。
校园垃圾拾捡机构是一辆采用直流伺服电机驱动的四轮平面移动小车,该机构采用前轮转向后轮驱动,车上装有摄像头,超声波传感器和碰撞传感器等,用以控制校园垃圾拾捡机构行走机构而躲避障碍物,通过识别废纸、果皮、塑料等垃圾通过控制抓取机构拾捡垃圾放置于垃圾箱内。
关键词: 行走机构;校园垃圾拾捡机构;机器人AbstractPicking up trash on campus is a special body of a mechanism in order to keep the school environment clean and designed by grasping mechanism fixed on the running gear consisting of a class of car robot.Picking up trash on campus is an organization driven by DC servo motors to move four flat cars, the agency uses rear-wheel drive front-wheel steering, the car is equipped with cameras, ultrasonic sensors and collision sensors, picking up trash on campus organizations to control travel agencies and avoid obstacles by identifying waste paper, peel, plastic and other garbage picking up garbage placed in the trash by controlling the grasping mechanism.Keywords:Walking agencies;Campus garbage pick up agencies; robot目录1 绪论 .............................................................. - 4 -1.1移动机器人概述 (4)1.2课题研究意义 (4)2 校园垃圾拾捡机构总原理 ............................................ - 5 -3 校园垃圾拾捡机构行走机构设计与计算 ................................ - 6 -3.1行走机构的工作原理 (6)3.2方案设计 (7)3.3电动机选型 (8)3.4设计链传动 (9)3.5链轮的设计及计算 (11)3.6轴的设计及计算 (12)3.7机架支脚端盖设计 (16)3.8轴承选择 (16)3.9联轴器的选择 (17)3.10减速器的选择 (17)3.11转向梯形设计键的选用与校核 (17)3.12键的选用与校核 (21)3.13纹紧固件选型 (21)3.14防松装置 (22)3.15密封件选择 (22)3.16一些标准零件一览表............................................ - 23 -4 总结 .............................................................. - 24 - 参考文献 ............................................................ - 24 - 致谢 ............................................................. - 26 -1 绪论1.1 移动机器人概述校园捡拾垃圾移动机器人是用智能化控制技术,在校园环境下机器人系统的自主运动、规划和控制机构的执行。
word专业整理JIANGXI AGRICULTURAL UNIVERSITY 江西农业大学校园垃圾收集路线设计院系:国土学院班级:环境工程 1101姓名:边鹏洋 20113376王静 20113375欧阳磊 20113374李樟平 20113373指导教师:罗运阔二O一四年六月前言目前,我国正处在城市化的进程之中,城市经济的迅速发展和城市人口的迅速增加,带来了一系列的城市问题。
主要表现:1.产量迅速增加,统计结果表明,从1979年以来,我国的城市生活垃圾平均以每年的8%~10%的速度增长,到2000年,我国垃圾产量预测将达1.2~1.4亿吨;2.由于资金匮乏,管理体制不够完善,城市生活垃圾有效处置率仅为13%,而城市垃圾无害化处理率仅有5%左右;3.大量城市生活垃圾未经处理,任意堆置城郊,侵占大量土地,污染土壤,空气,水体,许多城市形成了“垃圾围城”的污染局面,污染事故发生。
城市生活垃圾产生量迅速增加,垃圾如何收集成为环境管理部门面临的一大难题。
城市垃圾的收集与清运是城市垃圾收运管理系统中的重要步骤,也是其中操作最为复杂、人力物力需求最多的阶段。
选取合适的垃圾清运方式,设计合理有效的收运路线,对城市垃圾收运系统是十分重要的。
依靠科技进步,使城市生活垃圾收集、运输及处置系统科学化、系统化、规范化,实现中国城市生活垃圾处置“减量化、资源化、无害化”的目标,这是一项重要的社会发展战略任务。
本次设计是以江西农业大学北区教学区为设计对象,在分析校园垃圾排放及收集现状的基础上,通过北区教学区校园垃圾的日产生量,合理布置垃圾分布点,及各个分布点垃圾桶数量,综合考虑每日垃圾产量和收运频率等各方面因素,提出了合理的垃圾收运路线,经过分析比较,确定了最佳收集路线,力求经济合理的收集每天北区教学区的校园垃圾,为校园生活创造美好的环境。
一、江西农业大学基本情况1.1 基本概述江西农业大学是一所以农为优势,以生物技术为特色,理、工、农、经、管、文、法、教多学科综合发展的多科性大学,具有博士学位授予权,是我国首批具有学士学位、硕士学位授予权单位之一。

图书分类号:密级:毕业设计(论文)垃圾捡拾机器人控制结构设计GARBAGE PICK-UP ROBOT CONTROL ARCHITECTURE DESIGN学位论文原创性声明本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日学位论文版权协议书本人完全了解关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归所拥有。
有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要现今社会的公共卫生的保持还是需要消耗大量的人力,如果通过机器人来完成城市清洁的工作,就可以解放大量的劳动力。
在研究了垃圾捡拾机器人的情况之后,可以知道这种机器人的发展趋势是非常不错的,有着很高的研究价值。
本文主要对垃圾捡拾机器人的控制结构进行了研究。
通过查找文献,了解了机器人发展的状况与趋势,然后再对控制结构进行分析与设计。
这样我们就能够利用控制系统使机器人做到远程自动控制,大大的节约了社会资源,创造了丰富的价值。
关键词垃圾捡拾机器人;液压控制;PLC控制AbstractModern society to maintain public health or the need to consume a lot of manpower, if the city clean work done by a robot, you can liberate a lot of labor. After studying the situation of garbage pick up the robot, the robot can know the trends are very good, has high research value.In this paper, garbage pick-up robot control structure were studied. By looking for literature, to understand the situation and development trend of the robot, and then control structure analysis and design. So that we can use the remote control system enables the robot to achieve automatic control, greatly saving social resources, to create a rich value.Keywords Garbage pick-up robot Hydraulic control PLC control全套图纸外文文献扣扣1411494633目录1 绪论 (1)1.1概述 (1)1.1.1课题研究的背景和意义 (1)1.1.2移动机器人的发展与应用 (1)1.1.3主要研究内容与研究方法 (2)1.2垃圾捡拾机器人的运行框图 (3)2 垃圾捡拾机器人方案设计与选择 (4)2.1捡拾机构设计 (4)2.1.1方案一:铲斗车型结构 (4)2.1.2方案二:机械手抓取型结构 (4)2.1.3方案三:旋转毛刷收集机构 (5)2.1.4捡拾方案的确定 (5)2.2移动形式的确定 (5)3 机器人工作过程简单分析与机械臂机构设计 (6)3.1工作过程简单分析 (6)3.1.1垃圾捡拾机器人驱动的简单分析 (6)3.1.2捡拾机器人的机械手的工作分析 (6)3.1.3机器人支撑座 (7)3.2机械臂的机构设计 (7)3.2.1机械臂机构的设计要求 (7)3.2.2机械臂机构的具体设计 (7)4 液压控制环节 (9)4.1液压控制的优点 (9)4.2液压系统控制油路图 (10)4.3液压系统油缸选型 (11)4.3.1摆动液压缸的选型 (11)4.3.2手臂1与2的液压缸选型 (12)4.3.3机械手手爪活塞缸选型 (13)4.4液压泵的选型 (14)4.5系统校核 (16)4.6液压系统其他元件的选择 (19)5 机器人的控制机构设计 (20)5.1PLC控制 (20)5.2机械手的控制 (20)5.3驱动系统的控制 (23)总结 (26)致谢 (27)参考文献 (27)1 绪论1.1概述1.1.1课题研究的背景和意义虽然现在的社会是一个全民素质不断提高的社会,但是还是会存在一些随地乱扔垃圾的现象,还有生活垃圾的胡乱摆放的问题。
目录摘要 (1)关键词 (1)1前言 (2)2垃圾装车机构简介 (2)2.1作用及用途 (2)2.2国内外研究现状 (2)3垃圾装车机构设计参数 (3)4传动方案的确定 (4)5传动结构设计 (4)5.1 摇杆滑块机构的尺寸确定 (5)5.2 双摇杆的尺寸确定 (6)5.3 活塞缸安装位臵的确定 (6)6 垃圾桶提升机构运动与受力分析 (8)6.1 垃圾桶提升机构运动分析 (8)6.2 垃圾桶提升机构受力分析 (9)6.2.1 垃圾桶即将被提起状态提升机构受力分析 (9)6.2.2 垃圾桶处于其余位臵受力情况简述 (11)7 主要零件的尺寸计算 (11)7.1 拉杆的尺寸设计 (11)7.2 盖板的尺寸设计 (12)7.3 铰接点处销轴的设计 (12)8 液压系统设计 (13)8.1 液压负载分析和速度分析 (13)8.2 确定活塞缸主要参数 (14)8.3 拟定液压系统图 (15)8.4 液压元件的选择 (16)8.5 系统油液温升计算 (17)9 结论 (18)参考文献 (19)致谢 (20)附录 (21)垃圾装车结构设计摘要:随着社会经济的发展,人民生活水平的提高,垃圾数量的剧增不仅直接损害环境,也严重危害人们的身体健康。
为了方便垃圾的运输和处理,各种形式的垃圾车开始进入市场。
本文以垃圾装车机构为研究对象,应用本科阶段所学知识进行传动方案,机构受力分析等设计。
最终确定通过四杆机构的传动实现将垃圾从垃圾桶中装载到垃圾车内这一动作。
其中包括垃圾桶的抓紧,垃圾桶的提升,垃圾桶的倾倒以及垃圾桶的卸载。
文中对机构的受力进行了详细分析,并对各零件进行了设计和校核。
本文的研究成果可为垃圾车的研制与开发提供参考依据,对提高专用汽车企业的技术水平与市场占有力及在国内外市场的竞争能力,具有重要的一定现实意义。
关键词:垃圾装车;受力分析;计算;校核;机构;The garbage loading structure designAbstract:With the social and economic development, people's living standards improve, the rapid increase of the amount of garbage not only directly harm the environment, but also seriously endanger people's health. In order to facilitate the transport and disposal of garbage, various forms of garbage trucks began to enter the market.In this paper the garbage Loading institutions for the study, to apply undergraduate knowledge transmission programs, agencies stress analysis and design. Ultimately determine by four institutions transmission loading garbage from the trash to the garbage car this action. Including trash seize, enhancement of the trash can, trash dumping and trash uninstall. By the force of the institutions analyzed in detail, and each part of the design and check.The results of this thesis provide a reference for the research and development of the garbage truck, the force to improve the technological level of the Special Purpose Vehicle market share and competitiveness in the domestic market, has certain practical significance.Keywords: garbage loading; stress analysis;checking; institutions.1 前言垃圾装车是处理运输垃圾的重要环节,对提高工效、减轻劳动强度起到了不可小觑的作用。
校园垃圾拾捡机构行走机构设计1.引言2.校园垃圾拾捡机构行走机构设计3.行走机构设计4.抓取机构设计5.控制系统设计6.实验结果与分析7.结论参考文献引言随着城市化进程的加速,城市垃圾问题日益突出,垃圾分类和垃圾清理成为城市管理的重要环节。
而校园作为城市中的重要组成部分,也面临着垃圾处理的压力。
为了保持校园环境清洁,提高校园环境卫生水平,设计了校园垃圾拾捡机构行走机构。
校园垃圾拾捡机构行走机构设计校园垃圾拾捡机构是一种小型机器人,由行走机构和抓取机构组成。
行走机构主要负责机器人的移动和控制,抓取机构主要负责机器人的垃圾拾取任务。
行走机构采用四轮平面移动小车,由直流伺服电机驱动。
前轮转向后轮驱动,行走机构上装有摄像头、超声波传感器和碰撞传感器等,用于控制机器人的行走和避障。
抓取机构由机械手臂和夹爪组成,可以识别废纸、果皮、塑料等垃圾,并将其放置于垃圾箱内。
行走机构设计行走机构是校园垃圾拾捡机构的核心部分,其设计需要考虑机器人的稳定性和可靠性。
行走机构采用四轮平面移动小车,由直流伺服电机驱动。
前轮转向后轮驱动,行走机构上装有摄像头、超声波传感器和碰撞传感器等,用于控制机器人的行走和避障。
行走机构的设计需要考虑机器人的载荷和行走速度,以保证机器人能够顺利完成垃圾拾捡任务。
抓取机构设计抓取机构是校园垃圾拾捡机构的重要组成部分,其设计需要考虑机器人的垃圾拾取能力和操作灵活性。
抓取机构由机械手臂和夹爪组成,可以识别废纸、果皮、塑料等垃圾,并将其放置于垃圾箱内。
抓取机构的设计需要考虑机器人的垃圾拾取能力和操作灵活性,以保证机器人能够顺利完成垃圾拾捡任务。
控制系统设计控制系统是校园垃圾拾捡机构的重要组成部分,其设计需要考虑机器人的自主性和智能化程度。
控制系统采用单片机控制,通过摄像头、超声波传感器和碰撞传感器等实现机器人的自主行走和避障。
同时,控制系统还可以识别废纸、果皮、塑料等垃圾,并控制抓取机构完成垃圾拾取任务。
—-可编辑修改,可打印——别找了你想要的都有!精品教育资料——全册教案,,试卷,教学课件,教学设计等一站式服务——全力满足教学需求,真实规划教学环节最新全面教学资源,打造完美教学模式本科毕业论文(设计)课题名称垃圾拾捡机器人抓取及行走机构设计学院机械学院专业机械班级名称学生姓名学号内容存在大量删减指导教师↓完成日期有兴趣可以直接拉最下看教务处制垃圾拾捡机器人抓取及行走机构设计摘要经济在迅速发展增长,人们的物质生活追求也在不断地提高,产生的垃圾排放量正因此有增无减,造成越来越大的环境压力,像是校园、商店、街道这类集中人流的地方,每日都会造成大量的垃圾出现,而为了让这些地方保持清洁又需要投入大量环卫工人的劳动。
假若能设计出垃圾拾捡机器人将会很大程度上缓解上述的状况。
垃圾拾捡机器人系统作为多功能于一体的综合系统,其作用有感知周边环境、进行动态的操作规划、机构的配合控制等等。
其中主要部件的机械手作用有抓取、移动到指定位置等;行走机构作为机械手的脚,能开阔机械手的工作空间,令到机械手能以多方位角度执行任务,相反,机械手自身也在提升移动机器人的操作性能。
关键词垃圾抓取机构;小车行走机构;机器人ABSTRACT The rapid development of economy makes our materialistic pursuit gradually better, thus waste emissions be on the increase day by day, making more and more pressure on the environment, the densely populated place like campus, shops, street, manufacture large quantities of garbage, it need a large amount of manpower of cleaner and material resources in order to let these places keep clean.To design a garbage robot can ease the current situation.This robot is a set of environment perception, behavior control and execution, dynamic decision-making and planning functions in one integrated system. The role of the main components of mechanical hand is manipulator grasping, move to the specified location; As the base of mechanical hand, moving platform is used to expand the working space of the manipulator, making it perform the task in a more appropriate gesture, the addition of manipulator also greatly enhanced the performance of the mobile robot.KEY WORDS Garbage grabbing mechanism;Walking mechanism;Robot目录1.绪论 (7)1.1移动机器人概述 (7)1.2全球机器人行业发展现状分析 (7)2. 垃圾拾捡机器人总体方案设计 (8)2.1 垃圾拾捡机器人原理 (8)3.垃圾拾捡机器人行走机构设计 (10)3.1工作原理 (10)3.2方案设计 (11)3.5设计链传动 (12)3.5.1 选择链轮齿数 (12)3.5.2 确定计算功率 (12)3.5.3 选择链条型号和节距 (12)3.6链轮的设计.......................................................................... 错误!未定义书签。
本科毕业设计题目校园垃圾捡拾机器人抓取机构设计专业作者姓名学号单位指导教师2018年05月教务处编原创性声明本人郑重声明:所提交的学位论文是本人在导师指导下,独立进行研究取得的成果。
除文中已经引用的内容外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得**大学或其他教育机构的学位证书而使用过的材料。
对本文的研究作出重要贡献的个人和集体,均在文中以明确的方式表明。
本人承担本声明的相应责任。
学位论文作者签名:日期:指导教师签名:日期:摘要近年来,国内经济迅速发展,带动的人民的生活水平不断提高,不可避免的造成生活垃圾的排放增加,对环境的破坏也日渐增大,尤其是在校园这种人口密集的地方,每天都在造成大量的日常垃圾,比如塑料袋、饮料瓶、废纸、果皮等等。
这就势必要雇佣许多的清洁工来维持校园的清洁。
近些年机器人技术的迅猛发展为我们制造一个可以自主捡拾校园垃圾的机器人提供了极大地帮助,本人设计的这种机器人具有自主决策意识,可以进行环境感知并自主进行行为控制与执行命令。
捡拾垃圾的机械手采用全液压控制,它可以仿照人的手和手臂的行动,采用电脑程序来进行控制抓取和搬运物体,以及其抓取物体大小的计算和动力源大小及其校核。
机器人采用四轮行走模式,加以视觉传感器来自主识别和捡拾范围内的校园垃圾。
机械手用来实现抓取、操纵的命令,移动平台用来扩大机械手的动作执行空间,使机械手更好的发挥其功能。
关键词:校园;垃圾机器人;机械手;控制机构AbstractIn recent years, the rapid development of domestic economy, the rising standard of living of the people, the inevitable cause of the increase in domestic waste emissions, environmental damage is increasing, especially in the campus of such densely populated places, every day in the cause of a large number of daily waste, such as plastic bags, beverage bottles, waste paper, peel and so on. This is bound to hire a lot of cleaners to keep the campus clean.In recent years, the rapid development of robot technology for us to create a robot can pick up the campus garbage to provide a great help, I designed the robot with independent decision-making consciousness, can carry out environmental awareness and autonomous conduct control and execution orders. The manipulator of garbage collection adopts full hydraulic control, it can imitate the action of human hand and arm, use computer program to control grasping and moving objects, and the calculation and power source size of grasping object and its checking. Using four-wheel walking mode, the robot can identify and pick up the campus rubbish in the range by visual sensor. The manipulator is used to realize grasping and manipulating commands, and the mobile platform is used to enlarge the Manipulator's action execution space, so that the manipulator can play its function better.Key words:Campus, Garbage robot, manipulator, control mechanism目录第一章绪论 (1)1.1课程研究背景及其意义 (1)1.2移动机器人国内外发展现状 (1)1.3论文内容 (2)1.4机械手概述 (2)第二章校园垃圾捡拾机器人方案 (3)2.1机器人的功能 (3)2.2机器人的工作原理 (3)2.3机器人总原理图 (4)第三章机械手的整体设计 (5)3.1机械手的工作原理图 (5)3.2机械手爪的液压控制系统油路图 (5)3.3机械手手爪设计 (7)3.3.1手爪的工作原理 (7)3.3.2夹紧力的计算 (7)3.4液压缸的选型 (9)3.4.1爪子液压缸的选型 (9)3.4.2两个手臂油缸的选型 (9)3.4.3摆动液压缸的选择 (10)3.5液压泵的选择 (11)3.6校核 (12)3.7其它元件的选型 (14)总结 (15)参考文献 (16)致谢 (17)校园垃圾拾捡机器人抓取及驱动机构设计第一章绪论1.1 课程研究背景及其意义对移动机器人的钻研始于1960年末期,斯坦福研究院的Niissen和Charles Rosen等人,在1966年至1972年中研制出了取名Shakey的智能移动机器人。
本科毕业论文(设计)题目:校园垃圾拾捡机构行走机构设计学院:工学院姓名:学号:专业:年级:指导教师:称:副教授二0一四年五月摘要校园垃圾拾捡机构是为了保持校园环境清洁而设计的一种由抓取机构固定在行走机构上构成的一类的小车机器人的专门工作机构。
校园垃圾拾捡机构是一辆采用直流伺服电机驱动的四轮平面移动小车,该机构采用前轮转向后轮驱动,车上装有摄像头,超声波传感器和碰撞传感器等,用以控制校园垃圾拾捡机构行走机构而躲避障碍物,通过识别废纸、果皮、塑料等垃圾通过控制抓取机构拾捡垃圾放置于垃圾箱内。
关键词: 行走机构;校园垃圾拾捡机构;机器人AbstractPicking up trash on campus is a special body of a mechanism in order to keep the school environment clean and designed by grasping mechanism fixed on the running gear consisting of a class of car robot.Picking up trash on campus is an organization driven by DC servo motors to move four flat cars, the agency uses rear-wheel drive front-wheel steering, the car is equipped with cameras, ultrasonic sensors and collision sensors, picking up trash on campus organizations to control travel agencies and avoid obstacles by identifying waste paper, peel, plastic and other garbage picking up garbage placed in the trash by controlling the grasping mechanism.Keywords:Walking agencies;Campus garbage pick up agencies; robot目录1 绪论 .............................................................. - 4 -1.1移动机器人概述 (4)1.2课题研究意义 (4)2 校园垃圾拾捡机构总原理 ............................................ - 5 -3 校园垃圾拾捡机构行走机构设计与计算 ................................ - 6 -3.1行走机构的工作原理 (6)3.2方案设计 (7)3.3电动机选型 (8)3.4设计链传动 (9)3.5链轮的设计及计算 (11)3.6轴的设计及计算 (12)3.7机架支脚端盖设计 (16)3.8轴承选择 (16)3.9联轴器的选择 (17)3.10减速器的选择 (17)3.11转向梯形设计键的选用与校核 (17)3.12键的选用与校核 (21)3.13纹紧固件选型 (21)3.14防松装置 (22)3.15密封件选择 (22)3.16一些标准零件一览表............................................ - 23 -4 总结 .............................................................. - 24 - 参考文献 ............................................................ - 24 - 致谢 ............................................................. - 26 -1 绪论1.1 移动机器人概述校园捡拾垃圾移动机器人是用智能化控制技术,在校园环境下机器人系统的自主运动、规划和控制机构的执行。
平台小车的移动用来扩展抓取机构的工作空间,使机抓取机构能以更合适的姿态抓取垃圾,同时校园捡拾垃圾移动机器人中的抓取机构的加入也极大提高了移动机器人的性能。
1.2 课题研究意义把校园捡拾垃圾移动机器人抓取机构安装在移动平台上,这种把抓取机构安装在行走机构的移动平台上的方法使抓取机构拥有很大的操作工作空间。
并同时小车具有移动和操作功能,这样使它好于一般的机器人和传统机械手。
因此,研究这类机构的控制问题有十分重要的理论价值和实践意义。
2 校园垃圾拾捡机构总原理2.1 机构总原理图图2.1 机构总原理2.2 捡拾垃圾机构的操控过程校园捡拾垃圾机构工作时,启动遥控控制按钮,点动小车的开关按钮,把电源接通,校园捡拾垃圾机构行至校园内的工作区域,启动小车操作自动化控制按钮,这时机器进入自主运动运动状态。
校园捡拾垃圾机构通过视觉传感器摄像头传达垃圾所在位置:当在抓取机构所能抓取的范围内没有发现有垃圾时,小车后轮驱动电机启动小车向前行进,寻找垃圾,直至发现在其范围内发现垃圾时,驱动电机关闭小车停止移动,然后启动抓取机构控制系统,抓取机构通过传感器调整抓取机构位置使爪子对准垃圾,爪子闭合抓取垃圾,机械手随转台向垃圾箱方向转动,转到垃圾箱上方触碰到一行程开关,将垃圾放入垃圾箱内,随后机械手随转台转回到自由初始状态。
小车继续行进寻找垃圾目标。
校园捡拾垃圾机构在工作过程中,通过周围装有的传感器发现有障碍物时,转向电机启动,控制机构转向,避开障碍物。
3 校园捡拾垃圾机构行走机构设计与计算3.1 行走机构的工作原理行走机构是采用传感器技术自动控制小车的向前行进(后退)和转向的一种全自动化的移动平台。
校园捡拾垃圾机构通过摄像头视觉传感器,传达垃圾位置信息,进而控制小车的前进与否及转向。
(1)行走机构移动平台图图3.1 行走机构(2)行走机构向前前后移动校园捡拾垃圾机通过视觉传感器传达垃圾位置:当在机械手所能达到的范围内没有发现有垃圾时,机器人继续向前行进,寻找目标,直至发现在其范围内发现垃圾时,行走机构停止移动,启动机械手控制系统,将垃圾拾捡入垃圾箱,之后机构继续移动。
(3)行走机构转向机构在工作过程中,小车体上方装有传感器,当发现有障碍物时,控制转向电机启动,进而控制校园捡拾垃圾机构转向。
从而使小车避开障碍物。
小车转向原理如下图:3.2 方案设计(1)后轮驱动,前轮转向(★) (2)前轮驱动,前轮转向 (3)四轮驱动,四轮转向最终采用方案(1)进行设计3.2.1 后轮驱动原理(如下图) 后轮驱动路线:−−−−→−−−−→−−−−−−−−−−−−−−→链传动键联接电动机启动后驱动轴转动车轮转动移动平台后轮驱动图3.3后轮驱动图♋♋图3.2转向梯形3.2.2 前轮转向原理(如下图) 前轮转向路线:−−−−→−−−−→−−−−→−−−−−−−−−−−−−−−−−−−→联轴器联轴器键联接电动机启动(停止)减速器前轮转向轴车轮移动平台前轮转向3.4前轮转向图3.3 电动机选型选取为Z4系列的直流电动机。
额定功率P=1.1kw额定电压220v 额定转速450r/min 电动机,图3.5电机电机安装尺寸:3.4 设计链传动图3.6链轮和链条 链轮转速分别为:小链轮:1450/min n r = 大链轮: 2150/min n r = 中心距a 不小于300mm 3.4.1 选择链轮齿数传动比 12/450/1503i n n ===31221==z z n n 假设链速1/u m s > 因为齿数一般大于等于17。
所以取小链轮齿数=1Z 21, 大链轮齿数263Z = 3.4.2 确定链节数Lp 初定中心距a=25p机座号安装尺寸AC1E K GR S n 22 200±1.0573±1.0540 15 14.8-0.12 0±1.5124-0.30B DHF NMh3 205±1.05 18+0.014 +0.02140-0.5 5 -0.010 -0.055130-0.040 1654-0.30外形尺寸p b1 b2 h L1 200194158314.5437250==pa a op 682642.4422123=⎪⎭⎫⎝⎛-=πZ Z f 8.9322321=+++=opop P a f a Z Z L 链节数一般取偶数94=P L 3.4.3 确定链条节距按小链轮转速估计工作点落在线顶点左侧Km=1.0。
表5.11查得:工作情况系数:KA=1.3, 小齿轮齿数系数Kz=1.11,链长系数Kl=1.06 所以采用单排链, 由表查得单排系数,得到工作条件下的传动功率为'0 1.68A Z L mK PP kw K K K ==根据计算得到的齿轮的转速和功率,由图 5.26选择滚子链型号为08A ,其节距为P=12.7mm3.4.4 确定链长L 和中心距链长: 1.191000P L PL m ==74.1121=--Z Z Z L P 查表可得中心距计算系数24156.01=f中心距:2212122184222P Z Z p a L P Z Z Z Z L π⎡⎤⎢⎥+⎛⎫=-+- ⎪⎢⎥⎝⎭⎢⎥⎣⎦+-⎛⎫⎛⎫- ⎪⎪⎝⎭⎝⎭计算得a=318.9mm 中心距减少量()0.002~0.0040.638~1.276a a mm ∆== 实际中心距'317.6~318.26'318300a a a mm a mm mm=-∆==>取3.4.5 验算速度11 1.7325/601000n z pu m s⨯⨯==⨯与假设相符 3.4.6 作用于在轴上的轴力1.2Q K =工作平衡 取压力系数1000634.92PF N u==工作拉力 761.90Q Q F K F N ==轴上压力 3.4.7 设计结果滚子型号 08A —1×94 GB1243.1-83 链轮齿数 121Z = 263Z = 中心距 a=318mm761.90Q F N =轴压力 3.5 链轮的设计及计算 由以下公式:分度圆直径'180sintd z=23.851=d 02.2552=d 齿根圆直径'f r d d d =- (r d 为滚子直径) r d =7.92最大齿根距离:偶数齿 x f L d = 奇数齿 '90cosx r L d d z=- 齿根最大距离:180(1)0.8H d t ctgz=-- 齿顶圆直径180(0.54)a d t ctgz=+(1)小链轮:齿数:21 分度圆直径d=85.24mm齿顶圆直径da=91mm 齿根圆直径df=6.71mm最大齿根距离Lx=76.48mm 齿根最大距离dH=70mm结构形式:实心式材料:40热处理:淬火回火40-50HRC(2)大链轮:链轮齿数:63 分度圆直径d=255.02mm齿顶圆直径262mm 齿根圆直径df=246.51mm最大齿根距离Lx=246.43mm 齿根最大距离dH=241mm结构形式:实心式材料:40热处理:淬火回火40-50HRC3.6轴的设计及计算3.6.1选择轴的材料及热处理由于小车的驱动轴传递的功率不是很大,故选择常用材料45钢,调质处理.3.6.2初估轴径轴承选取:轴主要受径向力的作用,可选用轴承为深沟球轴承6406,根据轴承确定各轴安装轴承的直径为:D1=40mm,D2=30mm。