无人机地面站软件的设计与实现
- 格式:pdf
- 大小:3.86 MB
- 文档页数:80
《基于STM32单片机的无人机飞行控制系统设计》篇一一、引言随着科技的发展,无人机在各个领域中的应用越来越广泛。
为了提高无人机的性能、安全性和可靠性,设计一套有效的飞行控制系统至关重要。
本文旨在介绍基于STM32单片机的无人机飞行控制系统的设计原理与实现过程。
二、系统设计概述本无人机飞行控制系统采用STM32系列单片机作为核心控制器,通过对无人机飞行状态的实时检测和控制,实现对无人机的精确控制。
系统包括传感器模块、电机驱动模块、通信模块等部分。
传感器模块用于获取无人机的飞行状态信息,电机驱动模块根据控制器的指令驱动无人机飞行,通信模块实现与地面站的双向通信。
三、硬件设计1. STM32单片机STM32系列单片机具有高性能、低功耗等优点,是本系统的核心控制器。
通过编程实现对无人机的控制,包括姿态控制、导航控制等。
2. 传感器模块传感器模块包括陀螺仪、加速度计、磁力计等,用于获取无人机的飞行状态信息。
这些传感器将数据传输给STM32单片机,为飞行控制提供依据。
3. 电机驱动模块电机驱动模块采用舵机控制方式,通过PWM信号控制电机的转速和方向,实现无人机的精确控制。
该模块采用H桥电路实现电机正反转,配合单片机输出的PWM信号,实现对电机的精确控制。
4. 通信模块通信模块采用无线通信方式,实现与地面站的双向通信。
通过无线数传模块将无人机的飞行状态信息传输给地面站,同时接收地面站的指令,实现对无人机的远程控制。
四、软件设计软件设计包括控制系统算法和程序编写两部分。
控制系统算法采用先进的姿态控制算法和导航算法,实现对无人机的精确控制。
程序编写采用C语言,实现对单片机的编程和控制。
在程序设计中,需要考虑到系统的实时性、稳定性和可靠性等因素。
五、系统实现系统实现包括硬件组装、程序烧录和调试等步骤。
首先将各模块组装在一起,然后通过编程器将程序烧录到STM32单片机中。
在调试过程中,需要对系统的各项性能进行测试和优化,确保系统的稳定性和可靠性。
高 新 技 术4科技资讯 SC I EN C E & TE C HN O LO G Y I NF O R MA T IO N无人机不仅在军事上得到了广泛的应用,而且在民用方面也得到了普遍重视。
随着计算机技术的发展,利用计算机的软、硬件,建立有关无人机的飞行、控制以及评估的仿真系统已经成为各国的共识。
而以往的飞行仿真中,得到的结果都是大量的数据或曲线,不具有直观性。
可视化技术的出现,使得仿真结果不再单调,甚至人们可以与计算机进行直接交互,对虚拟世界中具有形体的信息进行操作,实现了人、机合一。
“无人机地面站”正是运用计算机图形学知识结合现代计算机仿真技术实现的仿真系统,它为地面人员提供了一个形象的、虚拟的飞行界面,用于显示无人机的各种飞行参数,更加方便地实现地面人员对无人机的控制。
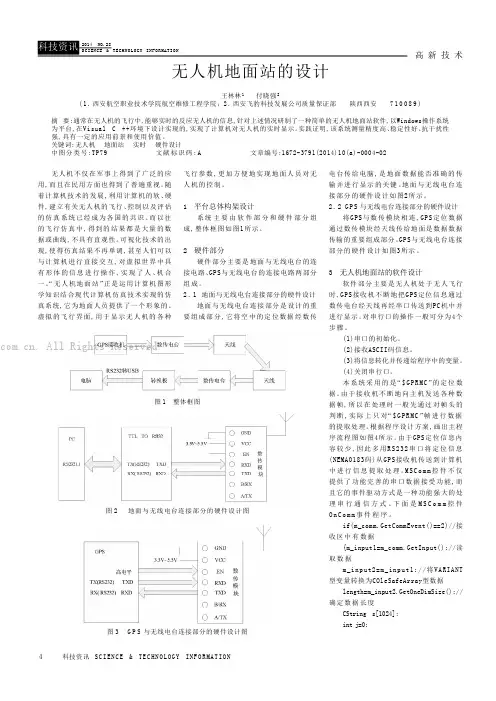
1 平台总体构架设计系统主要由软件部分和硬件部分组成,整体框图如图1所示。
2 硬件部分硬件部分主要是地面与无线电台的连接电路、GPS与无线电台的连接电路两部分组成。
2.1地面与无线电台连接部分的硬件设计地面与无线电台连接部分是设计的重要组成部分,它将空中的定位数据经数传无人机地面站的设计王林林1 付晓强2(1.西安航空职业技术学院航空维修工程学院;2.西安飞豹科技发展公司质量保证部 陕西西安 710089)摘 要:通常在无人机的飞行中,能够实时的反应无人机的信息,针对上述情况研制了一种简单的无人机地面站软件,以Windows操作系统为平台,在Visual C ++环境下设计实现的,实现了计算机对无人机的实时显示。
实践证明,该系统测量精度高、稳定性好、抗干扰性强,具有一定的应用前景和使用价值。
关键词:无人机 地面站 实时 硬件设计中图分类号:TP79文献标识码:A 文章编号:1672-3791(2014)10(a)-0004-02电台传给电脑,是地面数据能否准确的传输并进行显示的关键。
地面与无线电台连接部分的硬件设计如图2所示。
无人机三维视景仿真系统的设计与实现作者:谢迪来源:《硅谷》2015年第01期摘要无人机操作是一个复杂的过程,对操作人员素质要求很高。
传统的无人机地面站系统数据回显多采用参数、二位图标以及图表曲线等形式,使操作手不能对飞行在三维空间内的无人机飞行状态有一个直观的感受。
本文依据虚拟仿真现实技术的相关理论,介绍了在无人机地面站系统中加入三维视景仿真功能后该系统的基本结构以及三维视景仿真系统。
该系统可真实直观地反映无人机飞行状态,它是基于Creator来实现无人机和场景建模,通过VC++加载VEGA软件来完成分布式仿真控制程序的设计。
系统模拟了无人机弹射起飞、巡航飞行及开伞降落等各飞行阶段的真实状态。
关键词无人机;三维视景;飞行仿真;仿真控制;仿真技术中图分类号:TP3 文献标识码:A 文章编号:1671-7597(2015)01-0036-03由于无人机具备成本低、灵活性强、便于隐蔽等诸多特点,其在军事和民用等领域的应用也越发广泛。
无人机系统主要由平台系统、任务系统和地面控制站操作系统几大部分组成,平台系统通过装载任务系统完成特定的飞行任务,地面控制站操作系统完成平台系统和任务系统的实时监测和控制,其手段主要依赖于地面操作人员对实时回传、分发的飞行状态数据和任务设备状态数据的监测,并根据对下发数据的综合判断向平台系统和任务系统做出操作指令[1]。
随着航空技术和电子技术的融合发展,飞行控制系统和任务系统的日趋复杂,发生故障隐患的可能性随之升高,导致无人机操作人员需要关注的数据量倍增。
若依然采用简单的数字直接显示或图表曲线的等数据回显方式,就要求操作人员要有丰富经验,才能依据大量并不直观数据综合判断出平台系统当前的飞行状态。
而三维视景仿真技术可有效解决该问题,由于该技术是计算机技术、图形图像处理与生成技术、多媒体技术、信息合成技术、显示技术等诸多高新技术的综合运用,可使非专业人员亦能无人机模拟训练系统中,对无人机状态有直观的感受,能有效缩短无人机操作人员的培训周期。
无人机地面站(GCS)之五兆芳芳创作Mission Planner 操纵使用手册小左实验室101目录Mission Planner 操纵使用手册11.Mission Planner简介2错误!未指定书签。
??飞控板固件加载错误!未定义书签。
??链接飞控板??5.Mission Planner显示面板及特点55.1连接 Connect55.2遨游飞翔数据Flight Data5错误!未指定书签。
????初始化设置??Initial??setup6????参数配置和调整??Params??Configure安定tuning??????仿真器错误!未指定书签。
6遨游飞翔任务计划78.开源Mission Planner的二次开发根本298.1Visual Studio Community 13.0打开Mission Plannersolution298.2 宣布修改后的Mission Planner311.Mission Planner简介Mission Planner是无人机地面控制站软件,适用于固定翼,旋翼机和地面车.仅仅在windows系统下任务.Mission Planner可给你的自动车辆提供配置东西或动力学控制.其主要特点:●给控制板提供固件加载●设定,配置及调整遨游飞翔器至最优性能●通过在地图上的鼠标点击入口来计划,保管及加载自动任务给飞控板●下载及阐发由飞控板创建的任务记实●与PC遨游飞翔模拟器连接,提供硬件在环的UAV模拟器●通过适当的数传电台,可以监控遨游飞翔器状态,记实电台传递数据,阐发电台记实或在FPV模式下任务2.Mission Planner装置Mission Planner是windows系统上的自由开源软件,装置很是复杂.首先下载最新Mission Planner 装置文件2.运行装置文件,并按向导执行便可.3.装置包将自动装置所需软件驱动,包含DirectX plugin,如遇下面情况,请选择装置软件驱动便可.4.软件将装置到 C:\Program Files (x86)\APM Planner,并创建打开Mission Planner的图标在开始菜单.5.装置完毕后,便可启动Mission Planner ,启动后便可通过连接按钮,下载固件或连接飞控板.6.如果有升级版本,软件自动通知●用MicroUSB连接Pixhawk飞控板,USB连接PC机.●打开Mission Planner软件,左上角区域从下拉菜单中选择COM口,可以选在AUTO选项,并设置串口通讯波特率为115200.●在主画面上,选择Initial Setup | Install firmware画面,选择恰当的遨游飞翔器图标,答复提示画面“Are you sure”"Yes".当Mission Planner探测到pixhawk后,将要求你拔下飞控板,再次拔出飞控板,数秒后点击OK按钮,这个期间满足bootloader接受下载新固件的请求.●当下载完美结束后,在软件状态条处显示“erase”,“program”,“verify..”和“upload Done”等信息,标明固件下载成功.●连接飞控板和PC机可以选择USB电缆,数传电台或IPConnection.●在Mission Planner软件的左上角,选择连接的串口号和波特率57600,并点击连接.串口号是windows自动提供的,并在下拉菜单中出现.注意连接波特率必须悬着57600,而下载固件时的波特率必须选择115200.●连接成功后,连接按钮将显示Disconnect,用于断开连接操纵●如果遇见没有连接上,可能的原因如下:查抄正确的波特率,USB为115200,数传电台为57600查抄串口号是否正确,串口号是否存在?如果是USB口,请测验考试不合的USB口如果使用UDP或TCP连接,查抄防火墙是否疏通●飞控板上电后,会有声音和LEDs等显示状态,以确认飞控板固件运行正确5.Mission Planner显示面板及特点Mission Planner功效分为:连接,遨游飞翔数据,5.1连接 Connect用于下载固件到飞控板,或通过数传电台连接飞控板5.2遨游飞翔数据Flight Data●Mission Planner GCS主画面,数传电台与遨游飞翔器连接后,主画面显示如下数据:●HUD细节:1.空速(地速,如果没有装置空速管)2.转弯速率 3.航向 4.侧滑角 5.电台连接,bad packets% 6.GPS 时间7:高度8.空速9.地速10.电池状态11.人工水平线1215状态显示●小提示:地图显示当前GPS锁定位置当飞机右倾时,人工水平线左倾,飞机左倾,人工水平线右倾飞机状态输出,WPDist:代表距离下一个航点距离BearingERR:航向角偏差 AlterERR:高度偏差,WP:下一个航点 Mode:当前遨游飞翔模式Plane output: 自动驾驶仪输出的前4个通道信号autopilot状态下,可以发送遨游飞翔指令,当遥控器处于手动模式位置时,发送遨游飞翔指令无效双击HUD,会全屏显示HUD双击速度仪表,可以IU改最大比例尺可以下载地图替代谷歌地图,按下controlF,允许你上传图,制导模式:鼠标右键点击菜单,点击“fly to here”可以控制遨游飞翔器遨游飞翔,偏离原来计划航点5.3遨游飞翔计划 Flight Planning●左上角显示鼠标,显示当前经纬度,●右侧显示控制面板●在下面显示航点信息及动作.5.4初始化设置 Initial setup●初始化固件,当要下载新固件时●3DR数传电台设置,数传电台●其他可选硬件设置,比方超声波传感器,光流传感器等等5.5参数配置和调整 Params Configure安定tuning以下这些菜单,需要与飞控板连接以后才干看到●Planner:地面站选项,诸如logs,丈量单位,ETC等存储●Basic Pids:Auto pilot连接以后,这个选项出现,TBD.●Flight Modes:如何设置6个通道的遨游飞翔模式●Standard Params:auto pilot连接上后,会出现这个菜单TBD●GeoFence: 遨游飞翔区域设置●FailSafe: 毛病模式●Advanced Params: 初级参数设置●Full Parameter List:遨游飞翔器的所有飞控参数都可以在这里设置并保管,并能比较,加载以前的数据.●Copter Pids: 设置Copter遨游飞翔器的pids参数仿真初级选项菜单Advanced View,当使用HIL仿真技巧,配置选项设置画面6遨游飞翔任务计划Mission Planner可以给遨游飞翔器设置自动任务,当遨游飞翔器处于auto模式时启动自主遨游飞翔模式.●设置Home Position: 对于Copter,Home Position就是飞控板上电的位置,这意味着如果执行RTL模式,将自动出航到Home Position.对于固定翼飞机,Home Position 是GPS第一次锁定的位置.●任务简述:Copter任务,自动起飞到20m高度,然后遨游飞翔到WP2点,爬升到100m高,然后等待10秒,然后遨游飞翔器将处理WP3,下降到50m,然后出航下降.因为缺省的高度是100m,因此出航着陆高度也是100m.当到达着陆地点后,飞机下降.任务假定着陆地点在起飞点.●在航点设置画面的下方,有详细的航点计划及动作,可通过下拉菜单改动航点动作,通过地图鼠标拖拉改动航点位置.●缺省参数设置:Default Alt:缺省的遨游飞翔,RTL模式时,有自己的高度,如果Hold Default ALT选定后,RTL将按高度遨游飞翔; Verify Alt,与地图数据匹配,查抄高度数据,已反响距地高度,进行地形匹配或避免撞地.●通过右侧按钮可以保管飞行任务,加载飞行任务,便利重复执行任务.●Prefetch 提前下载地图数据到地面站,避免在野外无网络,无法连接地图数据.点击Prefetch按钮后,按下alt 键,用鼠标拖动的矩形区域下载选择的位置图片●Grid:鼠标右键菜单,通过点击增加顶点的方法绘制一个多边形,然后点击Grid菜单,自动绘制一个网格状的航点轨迹,然后在定义在每个航点的动作.●设置Home Location菜单,通过鼠标可以任意设置HomePosition●通过Measure Distance按钮,丈量航点之间的距离●Auto grid :Auto grid功效可以生成“割草机”轨迹,以收集当地的图片.在地图上选择鼠标右键,选择多边形绘制需要的区域,选择auto WPGrid菜单,依照对话框自动处理高度和距离,将自动生成如下网格航点:●任务指令:在地图的下方有表格的列表,将按当前遨游飞翔器类型产生指令列表,并增加一列航向参数需要用户提供.这些指令包含:导航到航点,临近盘旋,执行特殊动作(如拍照等)和条件指令.全部的指令在Mavlink Mission CommandMessages 定义.MavLink协议定义了大量的Mav_cmd 航点指令(通过MavLink_mission_item_message传递),飞控板处理这些指令和命令行参数,这些命令必须是与指定遨游飞翔器相关的,无效指令将被疏忽.每种遨游飞翔器只执行相关的命令和命令行参数,不相关的指令疏忽不执行,可能还有些有用的命令行参数没有被处理,由于消息大小限制.●指令分类:navigation导航命令用于控制无人机移动,包含:起飞,移动到航点,改动遨游飞翔姿态,着陆;DO 动作命令:帮助功效,不影响遨游飞翔位置,比方相机快门,抛投伺服等;Condition条件命令,用于延迟DO 命令,至到条件满足,例如:UAV达到指定高度和指定航点的距离条件.对于指定航点,一般先执行NAV导航指令,只到完成导航任务或在航点一定误差规模内,然后在执行一些列DO命令当条件完成后.●Mission Planner支持的旋翼机指令:MAV_CMD_MISSION_START:启动当前任务,自动(不必油门),参数:无MAV_CMD_DO_REPEAT_RELAY:给指定输出管脚指定洼地电平,按指定周期循环次数,参数:1管脚号2pwm 3repeat# 4cycle(s)MAV_CMD_DO_DIGICAM_CONFIGURE (Camera enabled only):MAV_CMD_DO_DIGICAM_CONTROL (Camera enabled only):MAV_CMD_DO_SET_CAM_TRIGG_DIST (Camera enabled only):MAV_CMD_DO_SET_ROI:指定云台指向区域,参数:5,6,7MAV_CMD_DO_SET_MODE:设置系统模式,preflight,armed,unarmed,参数:1MAV_CMD_DO_JUMP :切换到指定航点多次,参数:1,2MAV_CMD_NAV_TAKEOFF:起飞指令,所有任务的第一次指令,参数:7MAV_CMD_NAV_LAND:着陆,指定区域,参数:5,6 需退出Auto模式,切断动力MAV_CMD_NAV_LOITER_UNLIM:飞到指定区域,然后盘旋,参数:5,6,7MAV_CMD_NAV_LOITER_TURNS:指定区域盘旋,给定盘旋半径,参数:,??,??,??MAV_CMD_NAV_LOITER_TIME:指定区域盘旋,给定盘旋时间,参数:,??,??,??MAV_CMD_CONDITION_CHANGE_ALT :按指定爬升或下降速度改动至指定高度,参数:,????按指定速度升降至指定高度.MAV_CMD_NAV_SPLINE_WAYPOINT:依照曲线形式飞行到指定位置,参数:,??,??,??MAV_CMD_CONDITION_YAW:航向更改,参数:,??,??MAV_CMD_DO_MOUNT_CONTROL:控制相机云台,参数:1,2,3 pitch,roll,yaw 度数MAV_CMD_DO_PARACHUTE (Parachute enabled only):MAV_CMD_DO_GRIPPER (EPM enabled only):MAV_CMD_DO_GUIDED_LIMITS (NAV_GUIDED only):MAV_CMD_NAV_GUIDED_ENABLE (NAV_GUIDED only)●相机快门和云台指令3个通道●在遨游飞翔器移动的距离时间或指定的航点上执行快门动作,如果相机装置在云台上,还可以控制云台的指向●对于复杂的应用,可以手动控制航点和快门指令,对于庞杂的测绘任务,自动生成任意区域的指令任务.●云台指令:DO_SET_ROI 云台指向指定区域,DO_MOUNT_CONTROL 云台控制到roll,pitch,yaw标的目的●伺服指令:DO_SET_SERVO:DO_SET_RELAY给指定的驱动信号●自动任务举例1:Create WP Circle — Create a circle of waypoints.Area — Displays the area of the current polygon (if defined).Create Spline Circle — A circle where the altitude of waypoints follows a rising spline (relevant to flying vehicles).Survey (Grid) — Automatically create waypoints and camera control commands to survey a specified polygon.Survey (Gridv2) — Under construction! This is a simpler grid control for creating a rectangular survey area.SimpleGrid — A simple autocreated survey grid. No camera control is defined, so this must be added separately.自动任务举例2:在遨游飞翔计划画面,创建多点区域在区域内,鼠标右键点击菜单:Auto WP|Survey (Grid):Mission Planner 将自动显示配置画面,画面上定义了相机参数,并自动计较拍照距离,即DO_SET_CAM_TRIGG_DIST命令参数.当点击"Accept"按钮后,接受这些参数,Mission Planner将生成一系列航点笼盖指定区域,包含起飞和着陆航点,调用DO_SET_CAM_TRIGG_DIST指令,用于设置相机快门指令的距离,最后再次调用DO_SET_CAM_TRIGG_DIST来设置参数回0,停止拍照.注意2次调用指令的参数不合.最后,执行任务后,会得到15张图片.当遨游飞翔器执行RTL(Return To Launch)模式,比方被失效庇护Failsafe模式启动,缺省的模式前往出发点,但是经常性这种情况不成实现,由于距离和电量的关系.鉴于此种情况,我们现在支持多点Rally Points模式.只要无人机进入RTL模式,就会就近找到Home Point或最近的Rally Point,而不是前往起飞点.飞机将会在当地盘旋,Copter将会试图下降设置Rally Points,在遨游飞翔计划地图上,点击鼠标右键,选择菜单RallySet Rally Point,Rally Point高度需要设置,重复上面的操纵,重新设置多个Rally Points,点击菜单按钮上传数据,便可小提示:当使用geofence时,Rally point不克不及出界;确认RallyPoint的高度足够高,以避开修建或山丘;因为内存关系,一般最多设置10个接力点,对于固定翼飞机,盘旋半径与其他盘旋点一致,由WP_LOITER_RAD参数确定;RTL_ALT等参数没有用到.固定翼无人机 3.0.4以后都有地形跟踪功效,Terrain following, 即要求飞控板有当地存储数据,如Pixhawk.Copter 3.4以上版本支持地形数据,支持任务和着陆.●Terrain Following 保管数据在microSD上,地图数据给出地形海平面高度,在Pixhawk,数据存储在APM\TERRAIN 目录下,在MicroSD 卡上.●这些数据可以通过2中方法传递到飞控板上,一种是USB方法,一种是数传电台方法,一旦地形数据存储到SD卡上后,当GCS不连接后,就会用于遨游飞翔控制.当然这些数据,只用于Auto模式,RTL模式●地形数据可以通过数传电台,向地面站请求,也可以保管在SD卡上●地形跟踪遨游飞翔模式:RTL,Loiter,Cruise,FbwB,Guided(Flyto),AUTO●地形参数TERRAIN_FOLLOW.参数缺省是封闭的,因此没有地形跟踪使用,一旦设置TERRAIN_FOLLOW为1,就启动了地形跟踪模式●地形跟踪用于:FPV,Safe RTL,Aerial Photography●地形数据:地面站从网上下载,这里设计TERRAINSPACING,TERRAIN_ACCURACY参数,辨别描述地形跟踪的精度和最小距离.●设置固定翼地形跟踪:确定固定翼 3.0.4固件,确认Mission Planner1.3.9更高版本,设置TERRAIN_ENABLE为1 并且TERRAIN_FOLLOW为1,当GPS锁定后,通过USB连接飞控板,查抄flightData>Status ,查抄地形跟踪状态数据●地形跟踪对于机头指向很敏感,当前位置指向的遨游飞翔轨迹遨游飞翔时,包管固定翼遨游飞翔爬坡足够,能够避开地形数据.地形指向参数TERRAIN_LOOKAHD参数,爬坡参数TECS_MAX_CLIMB参数,与地形跟踪相关.●有2种遨游飞翔数据记实,即DataflashLogs机载数据记实,适用遨游飞翔当时下载进行研究.对于Copter遨游飞翔器,上电后即开始记实.Telemetrylogs电台数据记实,通过电台记实遨游飞翔数据到Mission Planner地面站中,两者的数据根本一致.●机械毛病:通常机械毛病包含ESC毛病或电机毛病,或螺旋桨损坏,这些毛病表示:期望的俯仰和滚转指令与丈量的俯仰和滚转传感器数据出现巨大差别,这中不一致在dataflash logs 中体现数据的严重别离,如下图:●振动:高频振动会引起Copter的加快度传感器,基于高度和水平位置估量的漂移偏大,将导致高度保持不稳定或盘旋出现漂移.振动数据可以从dataflash数据的IMU 数据中的AccX,AccY,AccZ数据看出.水平数据AccX,AccY征程规模在-3-+3m/s/s,AccZ在155m/s/s规模内,正常情况时,加快度会不是变更随着Copter的遨游飞翔变更,对于可接受的振动规模拜见下图:Tlogs RAW_IMU数据更新频率为10HZ,比较慢,欠都雅出是遨游飞翔带来的问题仍是振动带来的问题,而DataFlash 中的数据更新频率是50HZ,看振动现象比较容易.如果TLOG中的xacc,yacc数据在300+300之间,zacc在5001500之间,下面的数据标明在高度保持进程中,出现了振动问题,尽管更新速率比较慢.指南针搅扰:指南针搅扰通常是电源板散布导致磁场变更引起的,比方电源,电机,电调等引起的电磁场变更,可能引起指南针传感器问题而引起遨游飞翔标的目的错误,通过绘制tlog中的mag_filed和油门数据VFR_HUD,就很容易找到问题所在.下面的图像显示,一种可以接受的电磁搅扰,可见mag_field数据变更在10%20%,当throttle迅速拉起后,一般低于30%的搅扰都是可以接受的,30%60%的搅扰是模糊地带,也可能是ok,如果在油门拉起后,mag_field 高于60%是绝对不成接受的.小提示:mag_field数值在120550之间,在各地有所不合;磁场搅扰在compassmot setup中有设置;Dataflashlog中的COMPASS消息中,与RAW_IMU xmag,ymag,zmag数据一致;磁场数据有抵偿,一般子150+150之间,SENSOR_OFFSET变量组,mag_ofs_x,mag_ofs_y,mag_ofs_z;在上图中的开始阶段,磁场强度有一个短暂的脉冲可以疏忽,因为在油门拉起之前,因为它可能是上电引起的磁场强度的突变.GPS毛病:当在自动模式,RTL,AUTO,Loiter,由GPS信号产生的位置误差可能引起Copter位置错误,导致错误Copter猖狂的飞向错误的地点,这中间那个毛病会在tlogs和dataflashlog记实中体现,即卫星数量的削减和hdop的增加.tlogs画图,GPS_RAW_IT组,“eph”和“satellites_visible”值,拜见上图,卫星数量低于9,陪伴明显的GPS位置改动.在Dataflashlogs中,GPS消息可以看"HDop"和“NSats”列,注意:hdop值与DataflashData中的值单位不合.●电源毛病:电源模块提供可靠电源供电,但也有失效的时候,这些可以从logs中,机Copter还在空中(气压计,惯性传感器丈量高度数据)的时候,突然掉电的现象可从logs中看到.Dataflash,CTUN消息种的BaroALt,GPS消息,ReALt,Tlog中的VFR_HUD alt,GLOBAL_POSITION relative_alt数据绘制曲线图如下:板电压信号变更规模在0.100.15之间是正常规模.由于与其他设备同享电源,导致供电电压的动摇,极可能引起供电电源的失效或其他异常行动,板子的电压可通过如下办法绘制:Dataflash CURRENT 消息的VCC,Tlog HWSTATUS中的Vcc来绘制,下面的图,标明在油门推动后,板电压下降0.15V,在允许规模内,第2张图标明电压随机变更在0.15V 规模内,可接受.●未知的ERRORS包含失效Failsafes:当遨游飞翔控制器产生异常行动时,会引起失效庇护模式failsafes.有5种失效庇护模式可以被激活:油门失效,GPS失效,GCS失效,电池失效和越界.理想的办法是在dataflashlog数据第一列中过滤"ERR",所有的ECode都在源代码文件defines.h文件中有说明,●Tlog 是在MAVLink telemetry 消息一发送,即自动开始创建记实,文件格局为YYYYMMDD hhmm0ss.tlog在Mission Planner的装置目录下的logs目录中,同时.rlog 文件也生成,包含所有的tlog文件中内容和调试信息,这个文件的调试信息不克不及用于回放.●设置数据传输的速率,Software>Planner telemetry 下拉菜单来设置传输数率.因为所有的数据斗记实在tlog中,这个也控制保管在tlog中的数据.实际保管的数据可能比请求的数率低,由于CPU的原因.●任务回放:数据记实后,可以通过回放来不雅察数据记实.点击Telemetry logs tab,点击"Load Log"并找到tlog文件,点击"play"按钮便可.在回放进程中,可以跳到你期望的遨游飞翔时段不雅察遨游飞翔数据,通过滑块操纵.当回铺开始后,HUD将显示无人机在地图中的位置和遨游飞翔状态.点击图中的“Tuning”选择框,然后双击数据显示坐标,就会弹出显示数据的对话框,用于用户选择显示数据曲线.●创建3d遨游飞翔轨迹图像:可创建KMZ文件,选择Telemetry Logs tab,点击Tlog>Kml or Graph按钮,再按下"Create KML+GPX"按钮,选择flight tlog,拜见下图:经过如上操纵后,.kmz和 .kml文件将在tlog文件的根本上创建,这个文件讲可以在goole地球上看到3d的遨游飞翔轨迹.可以通过双击或拖动方法,在谷歌 Earth上查抄遨游飞翔和轨迹,不合的遨游飞翔模式显示不合的色彩轨迹.●提取参数和航点:从tlog文件中提取参数和航点信息,创建.KML文件,这些文件可以excel文件提取,航点信息文件也可以用于遨游飞翔计划的加载数据.●从遨游飞翔数据绘制图形:切换到flight data 画面,点击telemetry logs画面,点击"Tlog>Kml or graph"按钮,点击"Graph Log"按钮,选择flight tlog文件.注意:画图窗口可选择绘制的曲线,在绘制的曲线上,左右鼠标用于给绘制图形定义比例尺,可选择绘制色彩,通过鼠标滚轮改动图形的窗口大小等等小技能.Dataflash logs存在在飞控板上,如pixhawk的dataflash上,可以下载到Mission Planner上,来不雅察数据.●通过MAVLink下载logs:usb连接飞控板,打开MissionPlanner Flight Data 画面,在左下角的"DataFlash Logs"画面中,点击"Download Dataflash Log Via Mavlink"按钮然后选择你要下载的数据,这些数据讲保管在MissionPlanner/logs目录中.●自动阐发logs数据:通常点击"Log Analysis"按钮,选择一个Log文件,然后生成最为复杂的根本陈述,这个陈述将显著显示通常的问题.●手动查抄log:点击"Review a Log"按钮,选择log文件,查抄更加详细的信息,详见下图:以上这些信息包含GPS,IMU等数据,拜见下图绘制图形:选择适当的行,会看见当前列的头,然后找到期望画图的列,点击"Graph this data"按钮.例如ATT's的ROLL_In和ROLL数据绘制图如下:鼠标转动键用于缩放图形,也可以选择要仔细不雅察的区域,土多鼠标邮件选择设置比例尺等等操纵来查抄数据;也可以过滤相关消息类型,选择要选择的消息,在下拉菜单中选择.●设置想要记实的数据:LOG_BITMASK参数用于控制在dataflash记实的数据,最新版本可以设置独立的消息,如下:●消息细节:ATT(姿态信息),ATUN(自动调整),ATDE,CAM,CMD,COMPASS,CURRENT,CTUN,D32,DU32,ERR,EKF,GPS等信息如果有数传电台,就能够在Mission Planner地面站上记实遨游飞翔数据在".tlog"文件中,你加载和任意回放并转换为"KMZ"文件,在谷歌地球上看遨游飞翔轨迹,下图是播放画面:当log文件回放时,可以通过点击地图上的"Tuning"选择框阐发数据,可双击数据坐标弹出对话框,让你选择那数据是你想绘制的.如下图:●飞控板的加快度传感器对振动很是敏感.加快度计的数据可以用来估量遨游飞翔器的位置,若有额定的振动会导致依赖精确位置的遨游飞翔模式的遨游飞翔性能下降.振动影响所有的遨游飞翔器类型,尤其对Copter无人机在AltHold,Loiter,RTL,GUIDED,Position 和AUTO 遨游飞翔模式.如果你发明振动超出容忍规模内时,可以依照下面的办法设置振动阻尼.●Copter3.3以上版本:完成一次常规遨游飞翔,下载dataflash数据;使用GCS不雅察VIBE消息的VibeX,VibeY,VibeZ数据,这些数据是加快度m/s/s输出的尺度偏差.下图是3DR IRIS提取的数据,标明正常的规模在15m/s/s,但不时会有尖峰变更到30/s/s,最大可接受数值显示要低于60m/s/s.图上曲线Clip0,Clip1,Clip2数值,每次增加都可能达到最大值极限值16g,理想状态,这些数值应该为0或更低的数据<100,除非遨游飞翔器硬着陆情况,因此Iris无人机存在严重的振动问题.下面是遨游飞翔器由于振动问题导致的位置估量偏差很大关于振动数值的尺度偏差的计较拜见相关文献.对于振动的丈量以及预算对遨游飞翔器的设计改良很有帮忙.8.开源Mission Planner的二次开发根本8.1Visual Studio Community 13.0打开Mission Planner solution●Visual Studio Community 13.0是free版本,MS公司提供应团体用户,仅仅能创建客户端程序.Mission Planner GCS地面站是采取C#编程语言编写的开源软件,对于特定客户,可以重新定义软件功效和二次开发●打开Visual Studio;Open>Project>Solution,进入到源代码目录,选择ArduPilotMega.sln, Visual Studio将打开相关应用,包含相关程序包;设置"Solution Configuration" to "Debug"或"Release";设置"Solution Platforms" to "X86"; 在工程窗口,鼠标右键点击"Mission Planner"选择Properties,标识表记标帜和取消"Sign the ClickOnce manifests";●Mission Planner由多个项目组成,你可以通过展开"Mission Planner"和"Libs"来查抄:Mission Planner; AviFile; BaseClasses; BSE.Windows.Forms ; Core ; GeoUtility; .Core; .WindowsForms; KMLib; MAVLink; MetaDataExtractor; ms;MissionPlanner.Controls; MissionPlanner.Utils; px4uploader; SharpKml; ZedGraph;●Building Mission Planner: 在试图编译Mission Planner之前,因该有一个官方的版本,因为有一些".dll"文件没有包含在Git资源中;选择:Select Build>Batch Build...,"Select ALL",然后选择按下"Rebuild ",第一次编译肯定会遇到错误,请测验考试多次这种办法.●如果产生相关的”.dll“丢失的错误,(1).右键点击"SolutionExplorer",选择Properties, Reference Paths; (2) 在文件夹入口,浏览并选择Mission Planner的装置目录,例如:C:\Program Files (x86)\Mission Planner;(3)点击"Add Folder"按钮,添加"installed MP"目录到Reference paths;(4)点击Build Events, 删除所有以前成立和后来成立的选项,偏重新成立.●对于更多的丢失参考,重复以上任务,为每个项目重新设置参考路径,将会削减错误.●如果看到"BSE.Windows.Forms"..Could not locate the codeAnalysis tool At"., 通过取消"BSE.Windows.Forms"的代码阐发中的"Enable Analysis"选项.●在VS情况中,选择BUILD,Configuration Manager后,标明那个一个项目需要每次都要编译;查抄Build ,有些只要编译一次,;重复做,Build Clean Solution,Build,Rebuild操纵.所有项目都没有错误后,编译成功.8.2 宣布修改后的Mission Planner●如果修改成功,你可以成功在当地PC机上使用编译后的文件,但不克不及直接拷贝文件到其他机械上使用,这是因为运行文件需要一系列的依赖文件在不合的目录中,或需要一个打包软件帮忙你完成这个任务●或需要作者参加网络开发组织,去把你的任务加到开源项目中去.。
基于VC++和TRTD的无人机地面站软件开发作者:何湘智, 王荣春, 周伟来源:《现代电子技术》2010年第22期摘要: 针对某无人机飞行监测和控制要求,以为开发环境,采用TRTD实时程序开发包开发人机界面,设计了操作方便,功能强大的集飞行监测和控制、地面检测于一体的无人机地面站软件系统。
软件采用多线程设计方法,设计了主线程和串口通信子线程,串口通信以保证上行数据为主设计握手协议,将下行数据依对飞行安全重要性不同分为不同传输频率的辅祯,解决了串口通信数据,容易导致通信堵塞和地面站需要数据更新快的矛盾。
经实际联调,系统运行良好,通信实时性高,很好地完成了各部分功能,并具有良好的扩展性。
关键词:无人机; 地面站; 串口通信; 多线程中图分类号:TN911-34; TP311.52 文献标识码:A文章编号:1004-373X(2010)22-0046-03HE Xiang-zhi,WANG Rong-chun,ZHOU Wei(Beijing Aeronautical Technology Research Center,Beijing 100076, China)Abstract: According to the requirement of flight monitoring and control of certain UAV, a multifunctional and convinient flight control ground station software is designed which contain functions of flight control, monitoring and ground testing to develop human machine interface bythread and serial communication thread. To ensure the uplink data, the serial communication handshaking protocol is designed. The downlink data is divided into auxiliary frame of different transmission frequency according to different importance of flight safety, which can solve the problems of communication jamming and fast data update. Experiments show that the system works well and the communication is of perfect real-time property. The task of UAV ground station systemis fulfilled with satisfaction and it also has good expansibility.Keywords: UAV; ground control station; serial communication; multithread收稿日期:2010-06-180 引言无人机(UAV)是一种动力驱使、可控制、能携带多种任务设备、执行多种任务,并能重复使用的无人驾驶航空器[1]。
无人机管控软件系统设计*张亚锋1 冯玺2 左朝阳2 任建平1 邬奕澄11. 台州科技职业学院 浙江 台州 318020; 2. 西京学院 陕西 西安 710123摘 要 近年来,随着无人飞行器在各个领域的广泛应用,越来越多的人开始关注无人机的研究和应用。
为了满足无人机管控系统的需求,本文设计了一款基于WPF框架的PC端应用软件,其中,地面站软件具备实时显示无人机航线编辑、飞行状态监控等功能,并且能支持本地作业任务的加载和新建任务的发送。
同时,该软件还能够在无人机遇到危险情况时自动避障。
本文就该系统软件设计展开论述。
关键词 无人机地面管控系统;航线编辑;自动避障;UIUA V Control Software System DesignZhang Ya-feng1, Feng Xi2, Zuo Chao-yang2, Ren Jian-ping1, Wu Yi-cheng11. Taizhou V ocational College of Science and Technology, Taizhou 318020, Zhejiang Province, China;2. Xijing University, Xi’an 710123, Shaanxi Province, ChinaAbstract In recent years, with the wide application of UAV in various fields, an increasing number of people begin to focus on the research and application of UA V. In order to meet the needs of UA V control system, this paper designs a PC-terminal application software based on WPF framework, in which the ground station software has functions such as real-time displaying of UA V route editing and flight status monitoring, and can support the loading of local tasks and the sending of new tasks. At the same time, the software is also able to automatically avoid obstacles when the UA V encounters a dangerous situation. This paper discusses the design of this system software.Key words UA V ground control system; route editing; automatic obstacle avoidance; UI引言随着无人机系统的不断发展,无人机地面控制系统成为研究热点。
无人机地面站系统的设计与实现随着科技的飞速发展,无人机已经成为了现代社会中不可或缺的一部分。
无人机在军事、民用、科研等领域都有着广泛应用。
然而,要确保无人机的顺利飞行和任务完成,就需要有一个稳定可靠的地面站系统与之配合。
本文将就无人机地面站系统的设计与实现进行探讨。
一、地面站系统的基本功能地面站系统是对无人机飞行进行监控和控制的中枢,其基本功能包括但不限于以下几点:1. 实时监控:地面站系统能够实时接收并显示无人机的飞行数据,包括飞行高度、速度、方向等信息。
可通过传感器或摄像头等设备,获取无人机实时图像和视频,以便操作人员能够对飞行环境和目标进行实时监控。
2. 任务规划:地面站系统能够为无人机设定飞行任务和航线,并进行路径规划和导航。
根据任务需求和环境条件,地面站系统能够智能分析和优化飞行路径,确保无人机安全、高效地完成任务。
3. 遥控操作:地面站系统通过无线通信技术与无人机进行远程遥控操作。
操作人员可以通过地面站的操作界面,对无人机进行起飞、降落、悬停、航向调整等操作,确保无人机在飞行过程中能够保持良好的姿态和动作。
4. 数据记录和分析:地面站系统对无人机的飞行数据进行记录和存储,包括航行路线、高度数据、传感器数据等。
操作人员可以根据需要对这些数据进行分析和研究,以改进无人机的性能和飞行策略。
二、地面站系统的设计要点1. 硬件设备选择:地面站系统需要使用合适的硬件设备,包括计算机、显示器、遥控设备等。
计算机应选择高效、稳定的台式机或服务器,遥控设备应具备灵敏可靠的操作控制。
2. 界面设计:地面站系统的操作界面应简洁明了、直观友好,使操作人员能够轻松掌握和操作。
应提供必要的按钮、滑块、输入框等控件,方便任务规划、飞行控制和数据分析。
3. 数据通信:地面站系统和无人机之间的数据通信是地面站正常运行的基础。
可以选择无线数据链或卫星通信等方式,确保数据的及时传输和稳定性。
4. 安全保密:地面站系统中应考虑数据的安全保密问题,特别是军事和敏感任务。
www�ele169�com | 57软件开发0 引言对于无人直升机地面控制站来说,内部运行着多种类复杂的设备,几乎所有设备都和外界进行数据交互,控制站的正常运行依赖于这些设备的正常工作,由于站内设备数目众多且软件异构多样化,为每一款设备预留专门的监控软件是不现实、没有必要的,因而需要集成管理软件对所有设备进行集中进行监控、管理。
C++是强类型的面向对象开发语言,使用其开发的代码具有运行效率高、代码简洁、可直接操作硬件等优点。
但是,C++并没有专门的UI 组件,也缺乏可靠的线程通信机制。
QT 是一套跨平台的C++开发库,其封装了大量的工具库;界面源码与业务代码充分解耦合;QT 的信号槽机制十分适合UI 组件刷新。
因而本文利用QT 开发无人直升机地面站[1] 无人直升机地面站集成管理软件。
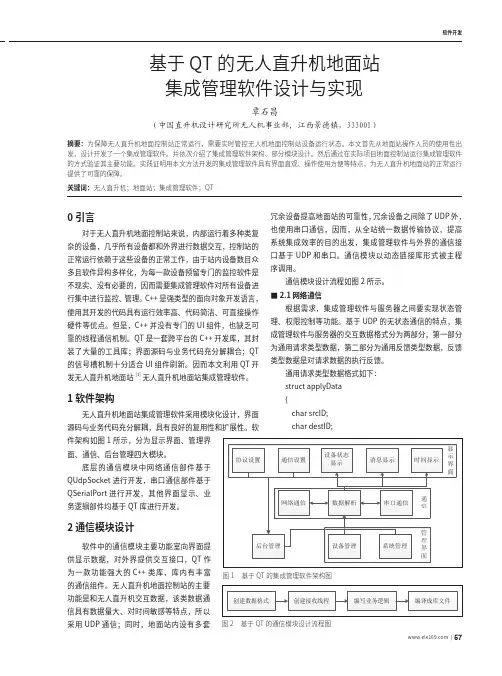
1 软件架构无人直升机地面站集成管理软件采用模块化设计,界面件架构如图1所示,分为显示界面、管理界面、通信、后台管理四大模块。
底层的通信模块中网络通信部件基于QUdpSocket 进行开发,串口通信部件基于QSerialPort 进行开发,其他界面显示、业务逻辑部件均基于QT 库进行开发。
2 通信模块设计软件中的通信模块主要功能室向界面提供显示数据,对外界提供交互接口,QT 作为一款功能强大的C++类库,库内有丰富的通信组件。
无人直升机地面控制站的主要功能是和无人直升机交互数据,该类数据通信具有数据量大、对时间敏感等特点,所以采用UDP 通信;同时,地面站内设有多套冗余设备提高地面站的可靠性,冗余设备之间除了UDP 外,也使用串口通信,因而,从全站统一数据传输协议,提高系统集成效率的目的出发,集成管理软件与外界的通信接口基于UDP 和串口。
通信模块以动态链接库形式被主程序调用。
通信模块设计流程如图2所示。
■2.1 网络通信根据需求,集成管理软件与服务器之间要实现状态管理、权限控制等功能。
基于UDP 的无状态通信的特点,集成管理软件与服务器的交互数据格式分为两部分,第一部分为通用请求类型数据,第二部分为通用反馈类型数据,反馈类型数据是对请求数据的执行反馈。
绿色质量观察作者简介:杨青(1992-),男,硕士研究生,主要研究方向为嵌入式开发及上层应用开发。
基于C#的无人机地面站软件设计Design of UAV Ground Station Software System Based on C#杨青,赵锋,李阳(电子科技大学电子工程学院,四川成都611731)Yang Qing,Zhao Feng,Li Yang (University of Electronic Science and Technology of China,School of Electronic Engineering,Sichuan Chengdu 611731)摘要:无人机在民用领域的应用近年来日益广泛,如航拍、电力巡线、农业生产等,其应用的多样化也对无人机各方面性能提出更高的要求,如远距离作业飞行、任务载重、高清图像传输等。
无人机地面站系统作为无人机系统的地面端具有至关重要的作用,主要完成无人机状态监控及飞行控制。
因此,对无人机地面站系统相关技术的研究及功能的实现对工程实践和行业应用具有重要意义。
该文基于科研项目主要完成基于小型工业无人机的地面站软件系统的设计与实现,地面站控制软件根据功能模块从软件界面、状态监控、指令控制、数据通信、数据存储等几个方面进行设计,通过Visual Studio 2013编译环境基于.Net 平台采用C#语言编程实现,其中电子地图的显示基于 控件实现,无人机飞行姿态虚拟仪表控件基于GDI+绘图实现,数据通信模块采用多线程串口读写操作。
关键词:无人机;地面站软件;;数据通信中图分类号:V279文献标识码:A文章编号:1003-0107(2017)05-0048-05Abstract:UAV has been widely used in the field of civilian applications in recent years,such as aerial survey,electricity inspection,agricultural production.Its application of diversification of all aspects of UAV performan-ce also put forward higher requirements,such as long-distance operations flight,task load,high-definition i-mage transmission and so on.As the UAV system on the ground side,UAV ground station system has a cru-cial role,mainly to complete the UAV status monitoring and flight control.Therefore,the research of the related technology and the realization of function of UAV ground station system is of great significance to engineeri-ng practice and industry application.Based on the research this paper mainly carried out the design and im-plementation of the ground station system of small industrial unmanned aerial vehicle (UAV).Ground control s-oftware were design according to the function module from the software Interface,state monitoring,instruct-ion control ,data communication and data storage ,which was realized by using C#in Visual Studio compiler e-nvironment based platform.Electronic map display was achieved based on control,virtual i-nstrument control of the flight attitude was achieved based on GDI+graphics.Tata communication module w-as achieved by multi-threaded read and write operations.Key words:UAV;ground station software;;data communication CLC number:V279Document code:AArticle ID :1003-0107(2017)05-0048-050引言近年来,无人机在民用市场发展较快[1-2],尤其在农业生产、灾害预警、遥感遥测和航拍等方面应用火热[3-4],因此根据无人机的广泛应用对无人机系统及其组成部分进行研究很有必要[5]。
无人机地面控制站设计与应用李大健;贾伟;齐敏;田晓雄【摘要】UAV Ground Control Station (GCS) is designed to control the UAV flight, the data - link system and the payloads. The basic system theory and main function structure are introduced. Design principle based on basic function unit is presented to reach a modular and combinable system after detailed analysis of GCS function and features. In line of the design principle the GCS basic function units are extracted and then designed, whose software, hardware and interface are described in detail. Flight tests show that the realization meets the system specification and fulfils the GCS function and feature requirements.%为了实现无人机系统的飞行操纵、数据链管理和机载任务设备控制,设计了无人机地面控制站;文中介绍了系统基本工作原理和主要功能构成,并对无人机地面控制站的功能要求和技术指标进行了分析,提出了基于基本功能单元的设计准则,以实现系统软硬件的模块化、组合化设计;依据设计原则对地面站的基本功能进行了抽取和设计,并对基本功能单元中的软硬件内容和接口关系进行了详尽的描述;飞行实验表明该设计达到了系统技术指标要求,满足系统对地面控制站的功能性要求.【期刊名称】《计算机测量与控制》【年(卷),期】2011(019)006【总页数】4页(P1351-1353,1356)【关键词】无人机;地面控制站;网络【作者】李大健;贾伟;齐敏;田晓雄【作者单位】西北工业大学365所,陕西,西安,710065;西北工业大学365所,陕西,西安,710065;西北工业大学电子信息学院,陕西,西安,710072;西北工业大学365所,陕西,西安,710065【正文语种】中文【中图分类】TP319.90 引言无人机地面控制站 (G round Contro l Station,GCS)是无人机系统的重要组成部分[1-2],其主要目的是完成无人机的飞行操纵、数据链管理、机载任务设备控制,同时以数字和图形形式提供飞机飞行状态、获取图像侦查信息,实现对全系统的监控。
小型无人机地面站导航显示系统设计作者:李南葛卫丽来源:《现代电子技术》2008年第05期摘要:介绍了小型无人机地面站系统的构成,地面站视频接收机的工作原理和飞行数据借助于SRV100实现实时传输的过程。
主要研究了地面站计算机在Windows环境下利用VisualC++6.0读取串行口输入的GPS定位数据,并对该数据进行处理和显示的方法,在此基础上设计开发了盘旋、自动回家功能模块,达到了应用需求。
关键词:小型无人机;GPS;VC++6.0;导航显示系统中图分类号:TP393 文献标识码:B文章编号:1004373X(2008)0509302Design of Ground Station of Navigation Vision System for Mini-UAVLI Nan,GE Weili(Engineering College of Armed Police Force,Xi′an,710086,China)Abstract:The paper introduces that the composition of autonomous navigation system for mini-UAV,the working principle of video receiver and the real-time transmission progress of aviation data recurring to SRV100.A method to receive and process GPS positioning data in ground computer using Visual C++6.0 under Windows environment is analyzed. Basing on that,the function module of circling and homing are designed and empoldered which is up to the application demand.Keywords:mini-UAV;GPS VC++6.0;navigation vision system1 引言小型无人机(Mini-UAV)通常指最大起飞重量小于的飞行器。