项目6-恒压供水变频PID控制
- 格式:ppt
- 大小:2.18 MB
- 文档页数:59
变频恒压供水系统PID控制器的参数整定林惠标【摘要】为了设计控制性能更好的变频恒压供水系统,分析并建立具有纯时滞一阶惯性环节的系统数学模型;使用MATLAB/Simulink PID整定工具求解变频恒压供水系统PID控制器的参数整定问题,优化设计变频恒压供水系统的PID控制器,这种方法不仅起到优化设计变频恒压供水系统的目的,而且自动化设计程度更高,很大程度上减少了控制器设计的工作量。
%In order to design a water supply system with stability and reliability, A frequency-conversion speed-regulation constant pressure water supply system is studied and analyzed in this paper.A mathematical model of system is established to obtain a pure hysteresis and one order inertia model. MATLAB/Simulink PID tuning tool is launched to achievePID parameters forfrequency-conversion speed-regulation constant pressure water supply system. The method can not only optimize the design of a reliability and stability system, but also reduce the workload of controller designed.【期刊名称】《机电工程技术》【年(卷),期】2016(000)001【总页数】4页(P36-39)【关键词】PID参数整定;变频调速;优化设计【作者】林惠标【作者单位】汕头职业技术学院机电工程系,广东汕头 515078【正文语种】中文【中图分类】TP29*汕头职业技术学院科研课题(编号:SZK2012C01)经济社会的迅速发展,人们开始提倡低碳经济发展,对供水质量和供水系统可靠性的要求不断提高;节能要求越来越高。
基于PLC的PID控制变频恒压供水系统摘要基于PLC的PID控制的变频恒压控制是现代供水控制系统的主要方式,利用PLC(可编程控制器)、PID调节器、压力检测传感器、压力变送器、电气控制设备、变频器及水泵机组组成闭环控制系统,使供水管网压力保持恒定。
关键词PLC;PID控制;变频器;闭环控制在实际生产生活中,用户用水的多少是经常变动的,因此供水不足或供水过剩的情况时有发生。
而用水和供水之间的不平衡集中反映在供水的压力上,即用水多而供水少,则压力低;用水少而供水多,则压力过大。
因此,保持供水压力的恒定,可使供水和用水之间保持平衡,即用水多时供水也多,用水少时供水也少,从而提高了供水的质量。
恒压供水是指在供水网中用水量变化时,出水口压力保持恒定不变的供水方式。
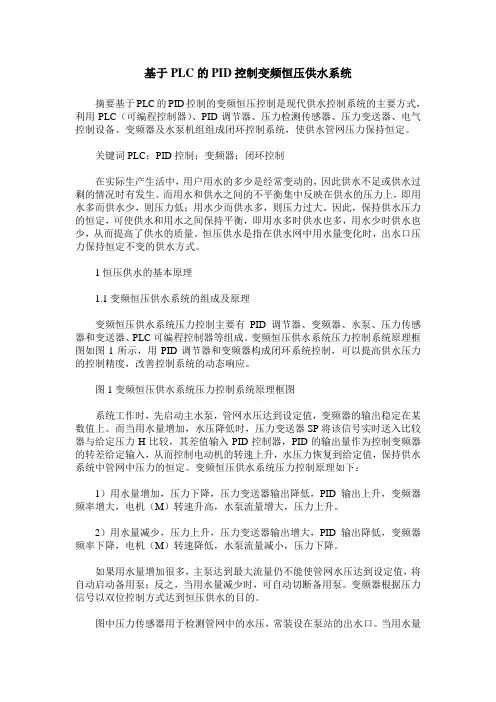
1恒压供水的基本原理1.1变频恒压供水系统的组成及原理变频恒压供水系统压力控制主要有PID调节器、变频器、水泵、压力传感器和变送器、PLC可编程控制器等组成。
变频恒压供水系统压力控制系统原理框图如图1所示,用PID调节器和变频器构成闭环系统控制,可以提高供水压力的控制精度,改善控制系统的动态响应。
图1变频恒压供水系统压力控制系统原理框图系统工作时,先启动主水泵,管网水压达到设定值,变频器的输出稳定在某数值上。
而当用水量增加,水压降低时,压力变送器SP将该信号实时送入比较器与给定压力H比较,其差值输入PID控制器,PID的输出量作为控制变频器的转差给定输入,从而控制电动机的转速上升,水压力恢复到给定值,保持供水系统中管网中压力的恒定。
变频恒压供水系统压力控制原理如下:1)用水量增加,压力下降,压力变送器输出降低,PID输出上升,变频器频率增大,电机(M)转速升高,水泵流量增大,压力上升。
2)用水量减少,压力上升,压力变送器输出增大,PID输出降低,变频器频率下降,电机(M)转速降低,水泵流量减小,压力下降。
如果用水量增加很多,主泵达到最大流量仍不能使管网水压达到设定值,将自动启动备用泵;反之,当用水量减少时,可自动切断备用泵。
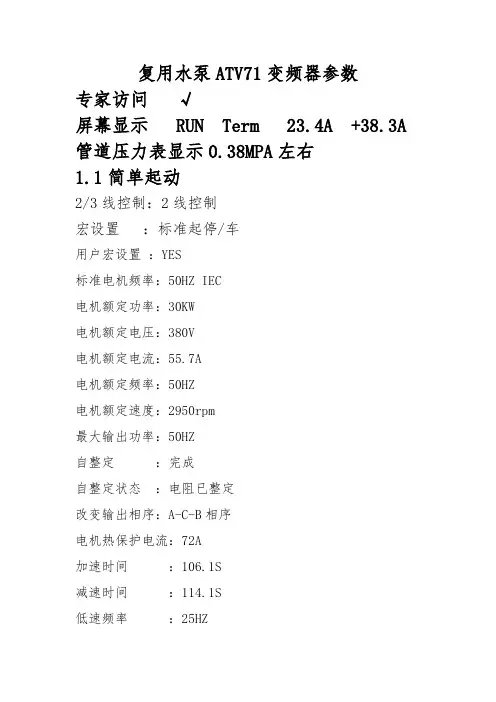
复用水泵ATV71变频器参数专家访问√屏幕显示 RUN Term 23.4A +38.3A 管道压力表显示0.38MPA左右1.1简单起动2/3线控制:2线控制宏设置:标准起停/车用户宏设置:YES标准电机频率:50HZ IEC电机额定功率:30KW电机额定电压:380V电机额定电流:55.7A电机额定频率:50HZ电机额定速度:2950rpm最大输出功率:50HZ自整定:完成自整定状态:电阻已整定改变输出相序:A-C-B相序电机热保护电流:72A加速时间:106.1S减速时间:114.1S低速频率:25HZ高速频率:50HZ1.2监视1.2.1输入/输出映像逻辑输入映像PR L11 L12 L13 L14 L15 L16模拟输入映像AI1 +3.741VAI2 -0.008m A逻辑输出映像R1 R2模拟输出映像AO1 +15.328MA1.2.2通信映像命令通道:端子排命令字:0000H ex当前给定通道:端子排频率给定:+38.3HZETA状态字:0437HexWO :-----1.2.3报警信号组: ---1.2.4图形终端频率给定:+41HZ1.2.5内部PID给定:6001.2.6图形终端转矩给定:0.0%1.2.7频率给定:+38.3HZ 1.2.8输出频率:+38.3HZ 1.2.9电机电流:23.4A 1.2.10电机速度:2299rpm 1.2.11电机电压:291V1.2.12电机功率:+29%1.2.13电机转矩:+36.9% 1.2.14电机电压:+379V 1.2.15电机热状态:11%1.2.16变频器热状态:37% 1.2.17功率:1111.2.18电机运行时间:26311h 1.2.19变频器已上电时间:52481h 1.2.20 IGBT报警计时器:0S1.2.21 PID给定 6001.2.22 PID反馈 6031.2.23 PID误差 -31.2.24 PID输出 +38.3HZ1.2.25当前设置组设置组0 1.2.26报警(故障)信号√1.3设置斜坡增量:0.1S加速时间:106.1S减速时间:114.1S低速频率:25HZ高速频率:50HZ电机热保护电流:72A变频器开关频率:2KHZ电流限幅1 :99A电机预磁设置:不预磁低速运行超时:999.9SPID比例增益:1.03PID积分增益:0.05PID微分增益:0.01PID斜坡:99.9SPID最小输出值:0HZPID最大输出值:+50HZ反馈超下限报警:0反馈超上限报警:1600PID误差报警:200电机电流阈值:66A电机频率阈值:50HZ频率阈值2 :50HZ电机热阈值:100%1.4电机控制标准电机频率:50HZ IEC 最大输出频率:50HZ自整定:完成自整定:NO自整定状态:电阻已整定改变输出相序:A-C-B相序电机控制类型:2点压频比UO :0V冷态定子电阻:105Lm额定励磁电流:23.4ALs漏电感:1.69mH转子时间常数:669ms电机额定滑差:0.8HZ 极对数:1电流限幅1 :99A电机噪声抑制:YES电机电压波动限幅:YES瞬态过压限幅优化:10微秒制动单元释能阈值:785V制动平衡:NO1.5输入/输出设置2/3线控制:2线控制2线控制:0/1电平反转:L12LI1设置LI分配LI1 0→1延时:0MS给定模板:标准AI1设置AI1 分配AI1类型:10V电压AI1最小值:0.0VAI1最大值:10VAI1过滤器:0.3SAI1拐点X:0%AI1拐点Y:0%AI2设置AI2分配AI2类型:电流AI2最小值:4.0MAAI2最大值:20MAAI2过滤器:0SAI2拐点X、Y :0%R1设置继电器R1分配器:变频器故障继电器R1延时:0MS继电器R1有效条件:1继电器R1保持时间:0MSAO1设置AO1分配:电机电流AO1类型:电流AO1最小输出值:0MAAO1最大输出值:20MAAO1滤波器:0MS报警信号组1L16=PTC报警□PTC1报警□. □. □. □变频器热阈值到达□1.6命令给定1通道:AI1给定反向禁止:NO停止按钮优先:YES组合模式:组合通道给定2切换:通道1有效给定2通道:AI2给定复制通道1→2 :不复制F1—F4键分配:未设置1.7应用功能给定切换√给定运算斜坡斜坡类型:线性斜坡斜坡增量:0.1S加速时间:106.1S减速时间:114.1S斜坡2切换阈值:0HZ斜坡切换设置:未分配减速时间自适应:有停车设置停车类型:斜坡停车自动直流注入寸动预设速度给定附近加减速给定记忆加减速逻辑输入控制预磁限位开关制动逻辑控制负载测量高速提升PID调节器√PID 反馈分配:AI1给定PID反馈最小值:0PID反馈最大值:1600 PID给定最小值:0PID给定最大值:1600内部PID给定分配:YES 内部PID给定:600PID比例增益:1.03 PID积分增益:0.05 PID微分增益:0.01 PID斜坡:99.9SPID误差求反:NOPID最小输出值:0HZPID最大输出值:+50HZ反馈超下限报警:0反馈超上限报警:1600PID误差报警:200PID积分重设:未分配速度给定分配:未设置自动/手动选择分配:未分配低速运行超时:999.9SPID唤醒误差阈值:0.0。
运用PID与变频器实现恒压供水控制方案2008-01-20 19:58一:PID概念1. PID解释:即由比例(Proportion)+积分(Integral)+微分(Differential coefficient)组合而成。
2. 比例P控制:调节量按误差成比例输出,纯比例时误差不会为零。
即一对一的对应关系。
3. 积分I控制:调节量按误差的积分输出,误差为零时,输出恒定。
既有一定的延迟。
4. 微分D控制:调节量按误差的微分输出,误差突变时,能及时控制。
既快速反应。
5. PI控制动作:所谓PI控制就是将比例控制P和积分控制I结合起来,根据偏差及时间变化,产生一个操作变量。
二:运用PI控制系统方框图运用于PID可实现压力负反馈单闭环控制。
控制理论与算法。
1. PID配合变频器与压力传感器实现单泵闭环恒压供水控制系统。
2. 通常压力传感器分电流型与电压型两种。
PID有内置变频器与单独的外置两种。
三:设定任何一个控制系统都需要经过反复地调试后方可达到最佳性能,没有调试的系统是不能工作或不能良好地运行。
下面举例AMB-G7系列单泵恒压供水调试方法。
A. 首先必须知道控制对象的参数。
对象特征、需要的最大供水压力、需要给定用户的恒定压力、供水最小压力、上限压力、下限压力等。
B. 假设对一小区进行恒压供水改造,其要求管道最大供水压力为(A)11Kpa ,对应传感器输出电流为20mA , 要求最小供水压力为(B)1Kpa,对应输出的电流为4mA , 用户要求恒定的供水压力为(C)5Kpa 。
根据以上三个参数可以确定PID的设定值,既:(必须保证在最大供水压力时对应于压力传感器电流输出最大,反之亦然,可求出用户要求供水压力时的传感器电流)C. 传感器给定电流(Iset)正比于用户所需的恒定供水压力。
(假设压力传感器输出电流为4~20mA)既:Iset/(Imax-Imin)=C/(A-B)→Iset/(20mA-4mA)=5/(11-1)→Iset/16=5/10→Iset=16*0.5=8mA(5 0%电流)其中Imax=最大电流 Imin=最小电流 Iset=需要给定的电流值D. 而G7系列F84设定电压也正比与设定电流。
PID PLC1.前言恒压供水系统是目前市场上运用最为广泛的供水系统之一。
变频器PID 控制系统是整个恒压供水系统的控制核心。
通过PLC (可编程逻辑控制器)对整个系统进行可靠的控制,不仅提高了水压的稳定性,同时也提高了系统运行效率,降低了能源消耗。
2. 恒压供水系统概述恒压供水系统是指在不同供水流率和负荷状态下,系统所维持的压力都是恒定的。
相比较其他常见的供水系统,恒压供水系统可以满足一些特殊的供水需求,比如公寓、办公楼、酒店、医院等高层建筑物的供水。
恒压供水系统一般可以分为两类:一类是调速泵房恒压供水系统,另一类是变频器恒压供水系统。
调速泵房恒压供水系统采用调速泵进行水压控制,系统通过加减泵数来维持恒定的工作水压。
这种方式适合较小规模的恒压供水系统。
变频器恒压供水系统则采用变频器控制泵的转速,通过控制水泵的转速来保持一定的供水压力。
对于大规模的高楼、大型公共建筑物等供水系统,采用变频器恒压供水系统更为常见。
3. 变频器PID 功能PID 控制是一种最广泛应用的控制方法之一,在变频器控制系统中,同样可以采用PID 控制算法来控制水泵的输出,实现恒压供水系统的控制。
PID 控制器的核心算法为比例(P)、积分(I)和微分(D)三部分,分别调节系统的稳定性、抗干扰性和响应速度。
在恒压供水系统中,通过调整PID 控制器的参数,可以实现快速反馈,实时调整水泵的输出,保持系统稳定性。
4. PLC 控制恒压供水系统PLC 是一种专门用于工业自动化的可编程电子控制器。
PLC 芯片可以通过编程实现对数字信号的处理、控制逻辑、数据存储和通信等功能。
在恒压供水系统中,PLC 的主要任务是控制变频器PID 控制器的输入和输出,采集水泵和供水系统的运行数据。
PLC 控制系统的核心模块为CPU (核心处理单元)和I/O 模块(输入输出模块)。
对于PLC 恒压供水系统的实现,可以通过编写PLC 程序来实现PID 控制器的参数调整、水泵的开关控制、水压监测和数据传输等任务。

恒压供水系统的MCP-PID控制摘要本文介绍了恒压供水系统中MCP-PID控制的应用。
该控制方案是基于模型预测控制(MPC)和比例积分微分控制(PID)的结合,能够实现恒定的水压控制和减小水泵的能耗。
对于水泵系统的运行,本文将其建模为一个非线性时间不变系统,并且针对其特点提出了MCP-PID控制器的设计方法。
该控制器能够通过预测模型进行优化控制,并且通过PID控制器实现控制,从而实现稳定的供水过程。
关键词:恒压供水系统、MCP-PID控制、模型预测控制、比例积分微分控制、非线性时间不变系统正文1. 引言恒压供水系统在现代城市生活中起着重要的作用。
为了满足市民的日常用水需求,水泵系统需要保持稳定的压力并减小水泵的能耗。
然而,传统的PID控制方法往往难以满足这一要求,因为该方法只能对已知系统进行稳定的控制,同时可能会存在运行效率低下的问题。
为了解决这些问题,在本文中,我们提出了一种新的恒压供水系统控制方案:MCP-PID控制。
2. 恒压供水系统的建模恒压供水系统可以看作是一个非线性时间不变系统。
其动态特性与控制需要取决于给定的水泵和管道参数。
在此基础上,我们将该系统的动态特性建模为以下方程组:$\dot{x}(t) = Ax(t) + Bu(t)$$y(t) = Cx(t)$其中,$x(t)$是系统状态向量,$u(t)$是控制输入向量,$y(t)$是输出向量。
$A、B、C$是系统的系数矩阵,分别表示系统的状态转移系数、输入系数和输出系数。
3. MCP-PID控制器的设计基于以上系统模型,我们提出了一种基于MCP-PID控制的方案,并针对该控制器的设计、实施、实现等环节进行详细分析。
3.1 MCP-PID控制器的MPC部分模型预测控制(MPC)是一种主要用于工业过程控制的高级控制技术,其能够通过预测模型进行优化控制。
在MCP-PID控制器中,我们采用MPC来预测水泵系统的未来发展情况,并根据预测的结果来调整控制器的参数,从而达到最优状态。

恒压供水变频器参数设置引言恒压供水变频器是一种用于控制水泵的设备,它可以通过调整水泵的转速,实现恒定的水压输出。
这在很多供水系统中是非常重要的,因为水压的稳定性直接影响到供水质量和供水设备的寿命。
本文将介绍恒压供水变频器的参数设置方法,以帮助用户正确使用这一设备。
选定工作方式在进行参数设置之前,首先需要确定使用的工作方式。
恒压供水变频器通常提供两种工作方式:压力差控制方式和流量控制方式。
用户可以根据实际需求选择合适的工作方式。
•压力差控制方式:该方式适用于要求水压稳定的场合,变频器会根据设定的压力差值来控制水泵的转速,从而保持恒定的供水压力。
这种方式适用于大部分常规的供水系统。
•流量控制方式:该方式适用于要求水流量稳定的场合,变频器会根据设定的流量值来控制水泵的转速,保持恒定的供水流量。
这种方式适用于一些特殊需求,例如需要保持一定流量的喷泉系统。
设置最大频率和最小频率恒压供水变频器需要设置最大频率和最小频率,来控制水泵的转速范围。
参数设置时,可以根据水泵的额定功率和实际需求来确定最大频率和最小频率的数值。
•最大频率:一般情况下,最大频率设置为水泵的额定频率。
在需要提供较大供水流量的情况下,可以适当增加最大频率,但不得超过水泵的额定频率。
•最小频率:最小频率的设置取决于水泵能否在较低频率下正常运行。
一般建议将最小频率设置为水泵的起动频率,以确保水泵能够在低负荷时正常启动。
设定PID参数PID参数是恒压供水变频器控制水泵的核心参数,它能够根据检测到的供水压力或流量与设定值的偏差,调整水泵的转速以实现恒压供水。
•比例增益(P)参数:P参数用于根据实际偏差与设定值之间的差异来控制水泵的速度调整。
P参数的数值越大,控制的响应速度越快,但可能引起控制的震荡和不稳定。
•积分时间(I)参数:I参数用于根据供水压力或流量的累积误差来控制水泵的速度调整。
I参数的数值越大,控制的静态精度越高,但可能引起控制的过冲。
•微分时间(D)参数:D参数用于根据供水压力或流量的变化率来控制水泵的速度调整。
关于ABB变频器的恒压供水PID控制详细讲解本人在造纸行业工作多年,对造纸行业的控制有一定的了解,平时苦恼于手下的员工对于造纸行业的电控了解不够.后来将造纸行业常用的控制汇编成一本培训资料,发给部门的所有工人熟读.收到一定的效果,本培训材料完全针对造纸行业的控制按照实际的电路来详细讲解其工作原理和工作的过程,涵盖造纸电控的外围设备控制,包括电机的直接启动,变频控制,软启动控制,正反转控制,多速电机控制.两地控制,纸机传动控制,复卷机.切纸机,复合机,包装输送系统.行车控制.可以说覆盖了造纸厂所有的电气控制.现先将其中的一小节发上来和大家交流,希望高手指正.恒压供水PID控制PID控制P:比例环节。
也称为放大环节,它的输出量与输入量之间任何时候都是一个固定的比例关系。
I: 积分环节:指输出量等于输入量对时间的积分。
D: 微分环节:指输出等于输入的微分。
微分只与变化率有关,而与变化率的绝对值无关,偏差越大,控制越强。
其主要作用就是对变化的波动有更强的抑制能力。
PID:比例积分微分调节器。
工作过程:当波动作用的瞬间,由于微分的超前作用,使微分的输出量最大,同时比例控制也开始作用。
然后由于波动的变化率为零(理想状态)。
故微分输出开始衰减,曲线开始下降。
这时由于偏差的作用。
积分开始作用,使曲线上升,。
随着微分作用的逐渐消失,积分起主导作用,直到偏差完全消失(理想状态)。
积分的输出也不再增加。
而比例的控制是贯穿始终的。
ABB变频器的过程PID控制ABB变频器内部有一个内置的PID控制器,它可用于控制压力,流量和液位等过程变量。
启动过程PID控制后,过程给定信号将取代速度给定信号。
另外一个实际值(过程反馈值)也会反馈给传动单元,过程PID控制会调节传动单元的速度使实际测量值等于给定值。
下图是一个不带PLC控制的一脱二恒压供水电气原理图:变频器通过3个24V中间继电器来控制外部备用泵。
假设:当前水压的期望值为4.2kg。
pid恒压供水pid恒压供水产品概述pid恒压供水引进国际上最先进的变频技术,采用原装进口名牌变频器,通过可编程序控制器对单台或多台水泵进行转速调节和台数调节,实现恒压变量供水的闭环调节,使供水系统达到最合理、最经济的运行效果,同时实现了操作的自动化。
产品结构紧凄、功能齐全、占地面积小。
取代了传统的水塔、高位水箱等供水装置,节约了工程投资,缩短了工程周期,避免了水质二次污染。
pid恒压供水说明1、pid恒压供水主要控制参数选用pid恒压供水的主要控制参数包括设备的流量、压力、电机容量等。
2、pid恒压供水分类按结构形式可分为室内整体式、室内分体式、室外整体式。
pid恒压供水组成考虑用水量波动以及泵的备用,采用2供水系统,可以互为备用,提高供水保障系数,循环交替使用,运行条件较好,可大大降低故障率。
以及在用水高峰时2台泵起动,保证供水能力,在一般用水量时段,1台泵运行,既可达到最大供水量,又可将水泵能力适当选小一些,节省赞助,降低能耗。
2台泵的管道并行,布局一致,以互为备用。
pid恒压供水特点:1、能自动24小时维持恒定压力,并根据压力信号自动启动备用泵,无级调整压力,供水质量好,与传统供水比较,不会造成管网破裂及水龙头共振现象。
2、动平滑,减少电机水泵的冲击,延长了电机及水泵的使用寿命,避免了传统供水中的水锤现象。
3、采用pid恒压供水保护功能齐全,运行可靠,具有欠压、过压、过流、过热等保护功能。
4、系统配置可实现全自动定时供水,彻底实现无人值守自动供水.控制系统具有故障报警和显示功能,并可进行工变频转换,应急供水。
5、系统根据用户用水量的变化来调节水泵转速,使水泵始终工作在高效区,当系统零流量时,机组进入休眠状态,水泵停止,流量增加后才进行工作,节电效果明显,比恒速水泵节电23%-55%。
6、pid恒压供水不设楼顶水池,既减少建筑物的造价,又克服了水源二次污染,气压波动大,水泵启动频繁和建造水塔一次性投资大,施工周期长,费用高等缺点。
恒压供水PID控制PID控制P:比例环节。
也称为放大环节,它的输出量与输入量之间任何时候都是一个固定的比例关系。
I: 积分环节:指输出量等于输入量对时间的积分。
D: 微分环节:指输出等于输入的微分。
微分只与变化率有关,而与变化率的绝对值无关,偏差越大,控制越强。
其主要作用就是对变化的波动有更强的抑制能力。
PID:比例积分微分调节器。
工作过程:当波动作用的瞬间,由于微分的超前作用,使微分的输出量最大,同时比例控制也开始作用。
然后由于波动的变化率为零(理想状态)。
故微分输出开始衰减,曲线开始下降。
这时由于偏差的作用。
积分开始作用,使曲线上升,。
随着微分作用的逐渐消失,积分起主导作用,直到偏差完全消失(理想状态)。
积分的输出也不再增加。
而比例的控制是贯穿始终的。
ABB变频器的过程PID控制ABB变频器内部有一个内置的PID控制器,它可用于控制压力,流量和液位等过程变量。
启动过程PID控制后,过程给定信号将取代速度给定信号。
另外一个实际值(过程反馈值)也会反馈给传动单元,过程PID控制会调节传动单元的速度使实际测量值等于给定值。
下图是一个不带PLC控制的一脱二恒压供水电气原理图:变频器通过3个24V中间继电器来控制外部备用泵。
假设:当前水压的期望值为4.2kg。
压力变送器PT的量程为0-10kg。
变送器的输出为0-20mA 的电流信号。
水泵为2台,一主一备。
要求:供水压力需长期保持在4.2kg,压力波动小于正负0.3kg。
当水压小于3.6kg需启动备用泵(此泵为直接启动),当水压高于5.5kg时,停止备用泵。
平时有单台主泵保持压力,根据压力不同调节电机的转速。
回路的控制要点:变频器需保持的过程给定信号为:4.2kg,量程为0-10kg对应的电流信号为0-20mA,则给定值为42%(以百分数来表示)。
(当为4-20mA时为54%。
算法为(4+(4.2/10)*16)/20=0.536)。
由参数11.03定义为KEYPAD (面板)后,直接在面板上给出。