Hypermesh四面体网格划分
- 格式:doc
- 大小:244.50 KB
- 文档页数:6
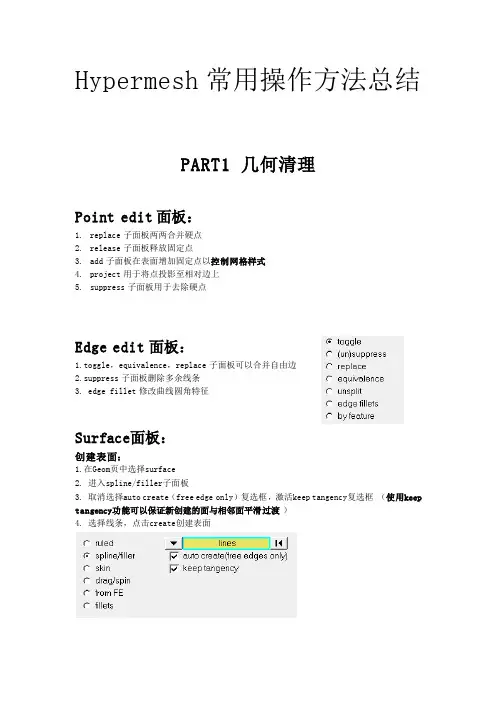
Hypermesh常用操作方法总结PART1 几何清理Point edit面板:1.replace子面板两两合并硬点2.release子面板释放固定点3.add子面板在表面增加固定点以控制网格样式4.project用于将点投影至相对边上5.suppress子面板用于去除硬点1.toggle,equivalence,replace子面板可以合并自由边2.suppress子面板删除多余线条3. edge fillet修改曲线圆角特征Surface面板:创建表面:1.在Geom页中选择surface2. 进入spline/filler子面板3. 取消选择auto create(free edge only)复选框,激活keep tangency复选框(使用keep tangency功能可以保证新创建的面与相邻面平滑过渡)4. 选择线条,点击create创建表面Surface edit 面板:对表面进行分割(以控制网格样式)1. trim with nodes 设定节点分割表面2. trim with lines 画线条分割表面,with cut line 选择surf ,之后drag a cut line画线,点击鼠标中键完成分割 3. trim with surf 用三点法创建表面以分割表面Solid面板:创建实体:1. 在主面板中选择Geom 页,进入solids 面板2. 选择bounding surfs 子面板3. 激活auto select solid surfaces 复选框4. 选择图形区任意一个曲面5. 此时模型所有面均被选中6. 点击Create 按钮,创建实体7. 状态栏提示已经创建一个实体,注意实体与曲面区别是:实体边线线型比曲面边线粗。
Solid edit 面板:分割实体:方法一:利用已有的内部线条将两部分实体分开 1. 进入solid edit 面板节点法 分割表面2. 选择trim with lines子面板3. 在with bounding lines栏下,激活solids选择器。
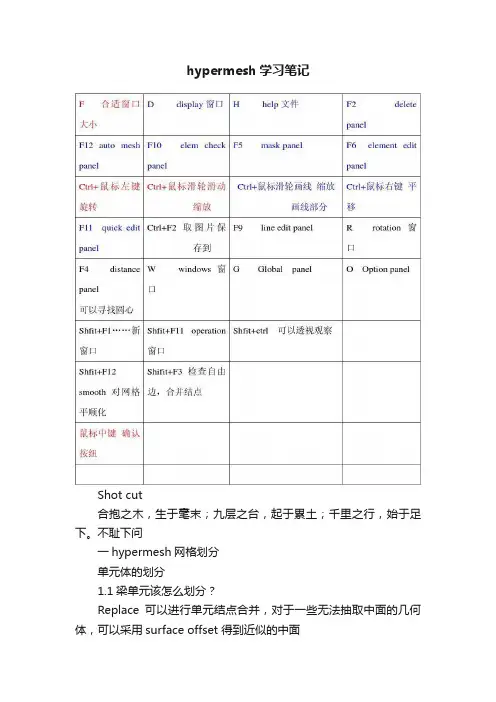
hypermesh学习笔记Shot cut合抱之木,生于毫末;九层之台,起于累土;千里之行,始于足下。
不耻下问一hypermesh网格划分单元体的划分1.1梁单元该怎么划分?Replace可以进行单元结点合并,对于一些无法抽取中面的几何体,可以采用surface offset 得到近似的中面线条抽中线:Geom中的lines下选择offset,依次点lines点要选线段,依次选中两条线,然后Creat.建立梁单元:1进入hypermesh-1D-HyperBeam,选择standard seaction。
在standard section library 下选HYPER BEAM在standard section type下选择solid circle(或者选择其它你需要的梁截面)。
然后create。
在弹出的界面上,选择你要修改的参数,然后关掉并保存。
然后return.2 新建property,然后create(或者选择要更新的prop),名称为beam,在card image 中选择PBAR,然后选择material,然后create.再return.3 将你需要划分的component设为Make Current,在1D-line mesh,选择要mesh的lines,选择element size,选择为segment is whole line,在element config:中选择bar2,property 选择beam(上步所建的property).然后选择mesh。
现在可以欣赏你的beam单元了,用类似方法可以建立其他梁单元,据说bar单元可以承受轴向,弯曲的力,rod的只能承受拉压的力,beam可以承受各方向的力。
1.2 2D面单元的划分:利用2D- automesh划分网格(快捷键F12),所有2D都可以用这个进行划分网格。
(目前我只会用size and bias panel)1.3 3D四面体的划分:利用3D-tetramesh划分四面体网格,一般做普通的网格划分这个就够用了。
Hypermesh网格划分1 入门基础篇1、如何将.igs文件或.stl文件导入hypermesh进行分网?files\import\切换选项至iges格式,然后点击import...按钮去寻找你的iges文件吧。
划分网格前别忘了清理几何2、导入的为一整体,如何分成不同的comps?两物体相交,交线如何做?怎样从面的轮廓产生线(line)?都用surface editSurface edit的详细用法见HELP,点索引,输入surface edit3、老大,有没有划分3D实体的详细例子?打开hm,屏幕右下角help,帮助目录下hyperworks/tutorials/hyermesh tutorials/3D element,有4个例子。
4、如何在hypermesh里建实体?hm的几何建模能力不太强,而且其中没有体的概念,但它的曲面功能很强的.在2d面板中可以通过许多方式构建面或者曲面,在3D面板中也可以建造标准的3D曲面,但是对于曲面间的操作,由于没有"体"的概念,布尔运算就少了,分割面作就可以了5、请问怎么在hypermesh中将两个相交平面到圆角啊?defeature/surf fillets6、使用reflect命令的话,得到了映射的另一半,原先的却不见了,怎么办呢?法1、在选择reflect后选择duplicate复制一个就可以法2、先把已建单元organize〉copy到一个辅助collector中,再对它进行reflect,将得到的新单元organize〉move到原collector中,最后将两部分equivalence,就ok拉。
7、请问在hypermesh中如何划分装配体?比如铸造中的沙型和铸件以及冷铁,他们为不同材质,要求界面单元共用,但必须能分别开?你可以先划分其中一个部件,在装配面上的单元进行投影拷贝到被装配面上8、我现在有这样一个问题,曲线是一条线,我想把它分成四段,这样可以对每一段指定density,网格质量会比直接用一条封闭的线好。
CAE软件在导入CAD几何模型的时候经常会遇到这样几种情况。
一、CAE软件导入几何数模时发生错误,无法导入。
这种问题可能是由于版本的限制问题,例如HyperMesh5.0不能直接导入UG18的prt文件,但5.1就可以了。
5.*不能直接导入pro/e的数据,但6.0就可以了。
这种问题比较好解决,用CAD软件把这些几何用iges格式输出处理一下就可以了。
但这种问题也可能是几何数模中存在严重错误所致,这就需要修改模型了。
二、导入几何模型后发现有些曲面无法导入,这样模型就会缺少一些比较重要的面,或者曲面存在缝隙、重叠、错位等缺陷,对较复杂的模型这种问题是经常性的。
边界错位经常引起网格扭曲,导致单元质量不高,求解精度差。
三、导入的模型很完整,没有错误。
但是由于CAE分析和CAD设计的思想不同,会产生一些两难的问题。
CAD设计主要是为生产服务的,模型中通常会包含某些细微特征,例如曲面和边的倒圆,小孔。
进行分析时如果要准确模拟这些特征,需要用到很多小单元,导致求解时间过长。
上面第一种情况不是我想讨论的内容,第二种和第三种情况则比较复杂,因为在这两种情况下,一些在前处理方面号称自动化程度高的软件,如Ansys、Marc、Patran等都会很郁闷。
就算网格能划分出来,质量怎么保证呢?毕竟我们对计算结果的精度和计算过程的费用是有要求的。
那么怎么办?一种办法是在做网格的时候忽略这些问题,比如说遇到缺少曲面,用户可以自己设法在CAE中做一个,毕竟简单的CAD工具还是有的。
但也只能对简单的曲面。
另外一种办法就是几何清理,不幸的是,据我所知,目前只有两种软件可以做到,HyperMesh和I-deas,另外我注意到I-deas的帮助里提到她的几何清理功能使用了HyperMesh的专利。
关于HyperMesh的几何清理,基础内容请参考Hypermesh基础培训Day 1部分的第三章,培训材料的中文版我即将发布。
很多东西还是要有经验才能理解的,大家慢慢摸索吧,有问题也可以到这里来问。
hypermesh网格划分总结1、我想提取一个面的线,映射到另外的面上,然后用那个线来分面,该怎么做呢?如果是几何面,但是没有你需要的边界线的话,你可以在几何面上已有的边界线上creat e nodes,然后利用这些nodes --〉lines /create,建立你需要的线,再project;或者最简单的办法,选择surf edit/line from surf edge如果是网格面,你可以geom/fea->surface,再project,或者直接project nodes,利用no des可以直接划分面2、hypermesh中如何将网格节点移动到指定的线或者面上。
project.3、面上网格分不同的comp划分,但划分后所有网格并不是连续的,只有同一个comp的网格连续,和临近的comp相邻的网格不连续,就是存在重叠的单元边和结点,如何合并为连续的单元1、Tool ->edges 下找出并合并面单元的自由边和找出并删除重节点2、Tool ->faces 下找出并合并体单元的自由面和找出并删除重节点4、我的模型画出六面体单元了,但是是8节点的,想变成20节点的,怎么变?我用的是s olidmap功能生成六面体单元的?1D or 2D or 3D下面的order change5、直接在已分网的体表面上,create elements through nodes,这个要在哪个菜单实现?我找不着edit/element中不是有个create吗?那就是通过node建单元6、对灰线构成的区域划分2D网格,网格后发现灰线变成了红线,是怎么回事呢?对计算结果有影响么?灰色的是lines,至于为什么画完网格后会变成红色,是因为生成了surface,surface的自由边会由红色来表示。
请注意为什么会生成surface,是因为你选择了mesh/keep surface 这个选项7、偶很想知道OI mesh定义是什么,和普通的mesh有什么区别普通mesh的网格经过clean up 或QI 调整后就跟QI mesh划分的网格效果差不多,QI 的具体参数可以自行设定。
使用Hypermesh进行网格划分与网格检查实例用Hypermesh划分网格特点是:简单、快捷、方便检查与调整网格质量。
下面介绍将CATIA 中生成的模型导入到Hypermesh中划分网格,首先打开Hypermesh 12.0。
如下图片1。
1、在CATIA里生成模型并进行初步处理。
对模型的处理要求如下:模型的面不能有间隙,不能有相对于网格尺寸而言过小的细小面,有限元模型不能划分出比网格尺寸还要小的细小面;生成的模型要求是实体模型,如果模型只有面组成,无法在Hypermesh中显示。
将实体模型文件保存为stp格式(盗版软件不能直接将CATIA文件导入)。
在Hypermesh 中选择File——Import,文件格式选择stp,输入模型。
如下图片2。
(注意路径不能有中文)2、导入楔形体模型后,在工具栏里选项选为Mixed,显示模型的面与线条。
如下图片3。
如果是复杂模型,那么模型表面可能出现红色的线条,表明该处有间隙,需要进行合并。
在主界面选择Geom栏下进入edge edit 选项,在toggle选项栏下,选中模型中红色的边线,软件会自动进行合并。
如下图片4和图片5。
如果toggle失败,可以适当调大cleanup tol=的数值。
3、确认模型的单位制:在Geom栏下,点击length,测量模型的长度。
如下图片6。
鼠标左键点击选中模型的一条边线,再点击length,会显示该线条的长度。
如下图片7。
本例中模型边长为1000,那么是毫米单位制。
在下面中划分0.02m尺寸的网格时,输入网格尺寸20。
4、在主界面快捷栏选中2D,进入automesh界面,如下图片8。
设置需要划分的面(左键点击sufs,在弹出的选项中选择displayed,表明对所有显示的面进行网格划分),在element size里输入网格尺寸20,在mesh type里选择网格类型为quads(trias不能用来提取压力信息),其它选项默认。
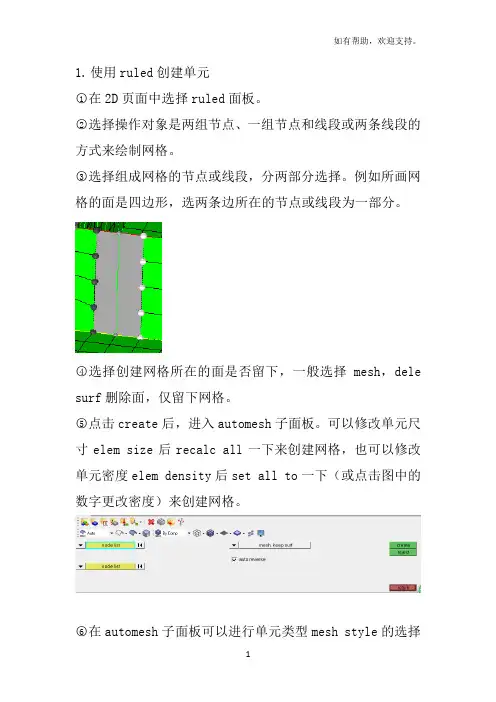
1.使用ruled创建单元○1在2D页面中选择ruled面板。
○2选择操作对象是两组节点、一组节点和线段或两条线段的方式来绘制网格。
○3选择组成网格的节点或线段,分两部分选择。
例如所画网格的面是四边形,选两条边所在的节点或线段为一部分。
○4选择创建网格所在的面是否留下,一般选择mesh,dele surf删除面,仅留下网格。
○5点击create后,进入automesh子面板。
可以修改单元尺寸elem size后recalc all一下来创建网格,也可以修改单元密度elem density后set all to一下(或点击图中的数字更改密度)来创建网格。
○6在automesh子面板可以进行单元类型mesh style的选择(四边形,三角形,四角形结合三角形等),可以进行单元偏置biasing的选择和进行单元的检查checks(warpage、aspect、skew、length、jacobian等的检查)。
○7点击return退出automesh子面板○8点击return退出ruled面板。
2.使用spline创建单元此功能与ruled类似,唯一的区别是步骤○2○3有些不同。
此功能是在节点或线段所围成的曲面上创建单元。
相对于ruled功能,仅进行一部分的选择。
要么选择节点创建单元,要么选择线段来创建单元。
○1在2D页面中选择skin面板。
○2skin面板可以用一组相邻线段来创建网格或表面。
所以先选择一组相邻线段,再选择是否保留网格所在的面,是否自动偏置。
○3最后点击create 进入automesh子面板,接着同ruled面板的操作。
○1在2D页面中选择drag面板。
○2drag是沿着向量拉伸线段、一排节点或一组单元来创建单元。
○3drag geome是选择一排节点或线段进行拉伸来创建单元。
首先选择一排节点或线段,再选择方向、距离,最好选择网格的面是否保留。
点击create进入automesh子面板,接着同ruled面板的操作。
在对具有复杂曲面特征的零件进行网格划分时,一般选用四面体网格。
如果基于体或封闭面来划分四面体网格的话,只要设置相关参数,就可以一键生成全部的四面体网格,划分过程不会产生面网格不封闭的现象(因为面网格是软件自动生成的)。
但这种方法划分的网格质量一般不太高,对局部区域网格疏密控制不如手动控制,通常适用于非重要、不关心的零部件。
如果基于封闭面单元来生成体单元的话,在处理复杂零件时(有时要多次分割实体),对重点区域面单元细分,非重点区域面单元粗分,往往到最后会遇到这样的问题:无法一键生成体单元,软件提示面网格不封闭。
根据自己多年的工作经验,主要有两种原因,也对应两种查找解决方法。
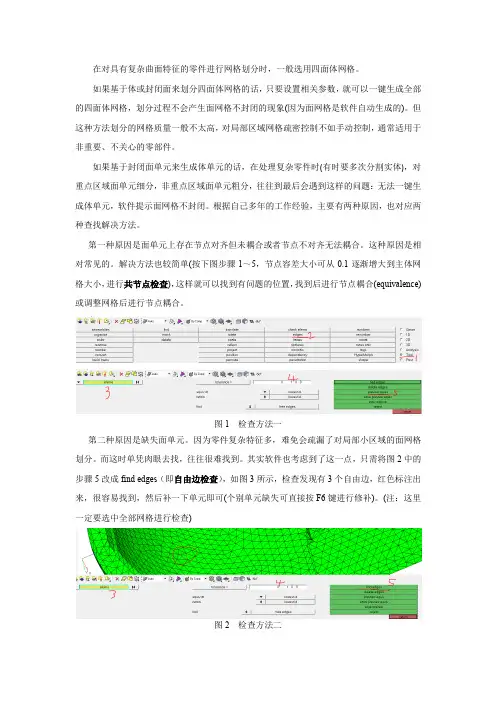
第一种原因是面单元上存在节点对齐但未耦合或者节点不对齐无法耦合。
这种原因是相对常见的。
解决方法也较简单(按下图步骤1~5,节点容差大小可从0.1逐渐增大到主体网格大小,进行共节点检查),这样就可以找到有问题的位置,找到后进行节点耦合(equivalence)或调整网格后进行节点耦合。
图1 检查方法一
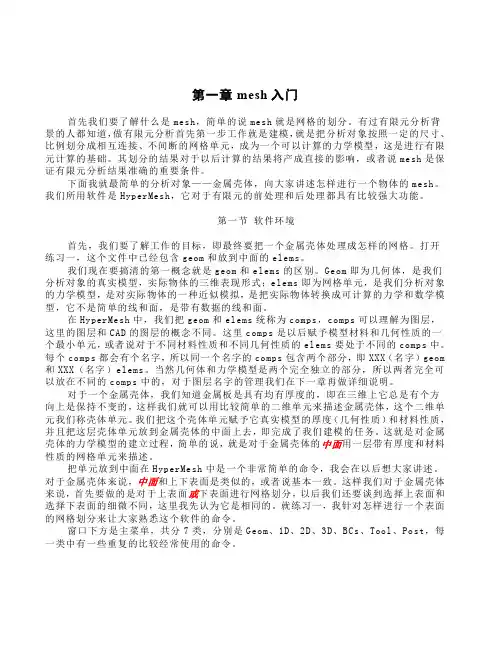
第二种原因是缺失面单元。
因为零件复杂特征多,难免会疏漏了对局部小区域的面网格划分。
而这时单凭肉眼去找,往往很难找到。
其实软件也考虑到了这一点,只需将图2中的步骤5改成find edges(即自由边检查),如图3所示,检查发现有3个自由边,红色标注出来,很容易找到,然后补一下单元即可(个别单元缺失可直接按F6键进行修补)。
(注:这里一定要选中全部网格进行检查)
图2 检查方法二。
第一章 mesh入门首先我们要了解什么是mesh,简单的说mesh就是网格的划分。
有过有限元分析背景的人都知道,做有限元分析首先第一步工作就是建模,就是把分析对象按照一定的尺寸、比例划分成相互连接、不间断的网格单元,成为一个可以计算的力学模型,这是进行有限元计算的基础。
其划分的结果对于以后计算的结果将产成直接的影响,或者说mesh是保证有限元分析结果准确的重要条件。
下面我就最简单的分析对象——金属壳体,向大家讲述怎样进行一个物体的mesh。
我们所用软件是HyperMesh,它对于有限元的前处理和后处理都具有比较强大功能。
第一节 软件环境首先,我们要了解工作的目标,即最终要把一个金属壳体处理成怎样的网格。
打开练习一,这个文件中已经包含geom和放到中面的elems。
我们现在要搞清的第一概念就是geom和elems的区别。
Geom即为几何体,是我们分析对象的真实模型,实际物体的三维表现形式;elems即为网格单元,是我们分析对象的力学模型,是对实际物体的一种近似模拟,是把实际物体转换成可计算的力学和数学模型,它不是简单的线和面,是带有数据的线和面。
在HyperMesh中,我们把geom和elems统称为comps,comps可以理解为图层,这里的图层和CAD的图层的概念不同。
这里comps是以后赋予模型材料和几何性质的一个最小单元,或者说对于不同材料性质和不同几何性质的elems要处于不同的comps中。
每个comps都会有个名字,所以同一个名字的comps包含两个部分,即XXX(名字)geom 和XXX(名字)elems。
当然几何体和力学模型是两个完全独立的部分,所以两者完全可以放在不同的comps中的,对于图层名字的管理我们在下一章再做详细说明。
对于一个金属壳体,我们知道金属板是具有均有厚度的,即在三维上它总是有个方向上是保持不变的,这样我们就可以用比较简单的二维单元来描述金属壳体,这个二维单元我们称壳体单元。
Hypermesh四面体网格划分Hypermesh四面体网格划分 1.长按ctrl键后,左键,旋转,,中间键,缩放,,右键,移动,放大后的图像按F字母键可以恢复原来的大小。
2.Entity:实体3.实体划分网格后删除网格4.Volume tetra:Tetra mesh:四面体网格Volume tetra:直接四面体网格划分Use Curvature:运用曲率,在有曲率的地方细化网格Use proximity:在尺寸小的地方细化网格5.Tetra mesh:四面体网格先生成表面的网格,再由表面的网格扩展成体网格查看生成的表面网格, 按“F5键”出现以下界面Shift+左键,选中一部分,选中的部分变白按“mask”键,出现下图,按“unmask all”恢复。
6.shift+F5:7.F10键,检查窗口Warpage:翘曲 aspect:长宽比 skew:扭曲 tet collapse,塌陷 Vol skew:空间扭曲Min angle:最小角Max angle:最大角8.塌陷部分重新划分,即有缺陷的网格部分,,F10---save failed,然后切换到F5键---elems,单元,---retrieve,调出保存的图形,---reverse,选中合格的单元,---mask,隐藏,只剩下有缺陷的单元Tool---find,工具框,---find attached---选中一部分---find键3D---tetra remesh---elems,displayed,---remesh9.快速网格划分,需自己设置参数,,Utility---Geom/Mesh---Quick TetraMesh 点开components选择要划分的部分10.流程树网格划分,打开流程树Create New:创建新的Load Existing:载入已经存在的流程树如下,。
1.1 实例:创建、编辑实体并划分3D网格本实例描述使用HyperMesh分割实体,并利用Solid Map功能创建六面体网格的过程。
模型如图5-1所示。
图5-1 模型结构本实例包括以下内容。
●导入模型。
●通过面生成实体。
●分割实体成若干个简单、可映射的部分。
●使用Solid Map功能创建六面体网格。
打开模型文件。
(1)启动HyperMesh。
(2)在User Profiles对话框中选择Default(HyperMesh)并单击OK按钮。
(3)单击工具栏()按钮,在弹出的Open file… 对话框中选择solid_geom.hm 文件。
(4)单击Open按钮,solid_geom.hm文件将被载入到当前HyperMesh进程中,取代进程中已有数据。
使用闭合曲面(bounding surfaces)功能创建实体。
(1)在主面板中选择Geom页,进入solids面板。
(2)单击()按钮,进入bounding surfs子面板。
(3)勾选auto select solid surfaces复选框。
(4)选择图形区任意一个曲面。
此时模型所有面均被选中。
(5)单击Create按钮创建实体。
状态栏提示已经创建一个实体。
注意:实体与闭合曲面的区别是实体边线线型比曲面边线粗。
(6)单击return按钮返回主面板。
使用边界线(bounding lines)分割实体。
(1)进入solid edit面板。
(2)选择trim with lines子面板。
(3)在with bounding lines栏下激活solids选择器。
单击模型任意位置,此时整个模型被选中。
(4)激活lines选择器,在图形区选择如图5-2所示线。
(5)单击trim按钮产生一个分割面,模型被分割成两个部分,如图5-3所示。
图5-2 选择边线图5-3 分割实体使用切割线(cut line)分割实体。
(1)在with cut line栏下激活solids选择器,选择STEP 3创建的较小的四面体,如图5-4所示。
CAE软件在导入CAD几何模型的时候经常会遇到这样几种情况。
一、CAE软件导入几何数模时发生错误,无法导入。
这种问题可能是由于版本的限制问题,例如HyperMesh5.0不能直接导入UG18的prt文件,但5.1就可以了。
5.*不能直接导入pro/e 的数据,但6.0就可以了。
这种问题比较好解决,用CAD软件把这些几何用iges格式输出处理一下就可以了。
但这种问题也可能是几何数模中存在严重错误所致,这就需要修改模型了。
二、导入几何模型后发现有些曲面无法导入,这样模型就会缺少一些比较重要的面,或者曲面存在缝隙、重叠、错位等缺陷,对较复杂的模型这种问题是经常性的。
边界错位经常引起网格扭曲,导致单元质量不高,求解精度差。
三、导入的模型很完整,没有错误。
但是由于CAE分析和CAD设计的思想不同,会产生一些两难的问题。
CAD设计主要是为生产服务的,模型中通常会包含某些细微特征,例如曲面和边的倒圆,小孔。
进行分析时如果要准确模拟这些特征,需要用到很多小单元,导致求解时间过长。
上面第一种情况不是我想讨论的内容,第二种和第三种情况则比较复杂,因为在这两种情况下,一些在前处理方面号称自动化程度高的软件,如Ansys、Marc、Patran等都会很郁闷。
就算网格能划分出来,质量怎么保证呢?毕竟我们对计算结果的精度和计算过程的费用是有要求的。
那么怎么办?一种办法是在做网格的时候忽略这些问题,比如说遇到缺少曲面,用户可以自己设法在CAE 中做一个,毕竟简单的CAD工具还是有的。
但也只能对简单的曲面。
另外一种办法就是几何清理,不幸的是,据我所知,目前只有两种软件可以做到,HyperMesh 和I-deas,另外我注意到I-deas的帮助里提到她的几何清理功能使用了HyperMesh的专利。
关于HyperMesh的几何清理,基础内容请参考Hypermesh基础培训Day 1部分的第三章,培训材料的中文版我即将发布。
很多东西还是要有经验才能理解的,大家慢慢摸索吧,有问题也可以到这里来问。
Hypermesh四面体网格划分
Hypermesh四面体网格划分 1.长按ctrl键后,左键,旋转,,中间键,缩放,,右键,移动,
放大后的图像按F字母键可以恢复原来的大小。
2.Entity:实体
3.实体划分网格后删除网格
4.Volume tetra:
Tetra mesh:四面体网格
Volume tetra:直接四面体网格划分
Use Curvature:运用曲率,在有曲率的地方细化网格
Use proximity:在尺寸小的地方细化网格
5.Tetra mesh:四面体网格
先生成表面的网格,再由表面的网格扩展成体网格查看生成的表面网格, 按“F5键”出现以下界面
Shift+左键,选中一部分,选中的部分变白
按“mask”键,出现下图,
按“unmask all”恢复。
6.shift+F5:
7.F10键,检查窗口
Warpage:翘曲 aspect:长宽比 skew:扭曲 tet collapse,塌陷 Vol skew:空间扭曲
Min angle:最小角
Max angle:最大角
8.塌陷部分重新划分,即有缺陷的网格部分,,
F10---save failed,然后切换到F5键---elems,单元,---retrieve
,调出保存的图形,---reverse,选中合格的单元,---mask,隐藏,只剩下有缺陷的单元
Tool---find,工具框,---find attached---选中一部分---find键
3D---tetra remesh---elems,displayed,---remesh
9.快速网格划分,需自己设置参数,,
Utility---Geom/Mesh---Quick TetraMesh 点开components选择要划分的部分
10.流程树网格划分,
打开流程树
Create New:创建新的
Load Existing:载入已经存在的流程树如下,。