张力腿平台TensionLegPlatformTLP
- 格式:ppt
- 大小:10.82 MB
- 文档页数:28
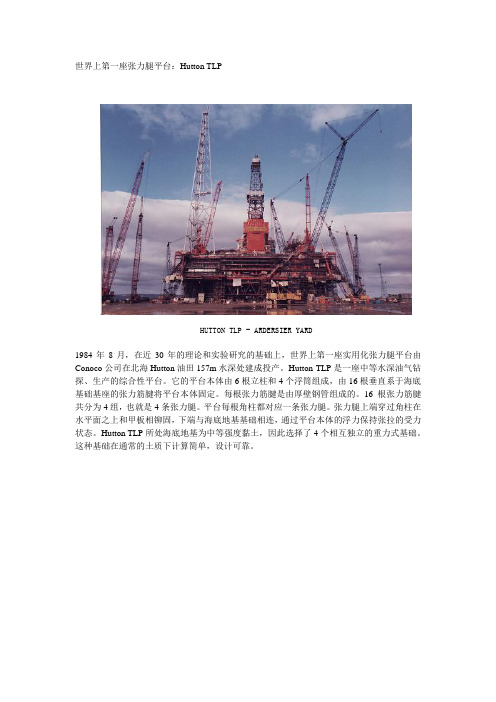
世界上第一座张力腿平台:Hutton TLPHUTTON TLP - ARDERSIER YARD1984年8月,在近30年的理论和实验研究的基础上,世界上第一座实用化张力腿平台由Conoco公司在北海Hutton油田157m水深处建成投产。
Hutton TLP是一座中等水深油气钻探、生产的综合性平台。
它的平台本体由6根立柱和4个浮筒组成,由16根垂直系于海底基础基座的张力筋腱将平台本体固定。
每根张力筋腱是由厚壁钢管组成的。
16根张力筋腱共分为4组,也就是4条张力腿。
平台每根角柱都对应一条张力腿。
张力腿上端穿过角柱在水平面之上和甲板相铆固,下端与海底地基基础相连,通过平台本体的浮力保持张拉的受力状态。
Hutton TLP所处海底地基为中等强度黏土,因此选择了4个相互独立的重力式基础。
这种基础在通常的土质下计算简单,设计可靠。
Hutton TLP float out其实,在中等水深条件下,钢导管架平台是较经济的石油平台类型。
当时选择张力腿平台形式的一个重要目的是希望在中等海况下获得关于张力腿平台运动性能的一些实测数据,为以后张力腿平台在深海域的广泛设计应用提供科学依据。
从这种意义上来说,Hutton TLP也是一座实验平台。
在Hutton TLP建成投产后,取得了良好的经济效益,建立了业界将张力腿平台投入生产领域的信心,而且,各国学者围绕其进行了广泛而卓有成效的研究工作,为后来建造其他张力腿平台打下了坚实的基础。
A workboat at anchor, with the Hull of the Hutton TLP catching the last rays of the spring sun.Hutton TLP LegsHutton TLP Legs第一代张力腿平台总述第一代张力腿平台,即传统类型的张力腿平台,应用时间长、分布范围广、平台数量多、设计理论成熟,在张力腿平台发展的历史中占有很重要的地位。

张力腿平台发展与简介导管架平台和重力平台由于其自重和工程造价随水深大幅度地增加, 已经不适应深水域油气开发, 所以本世纪60 年代提出了顺应式平台的概念, 并在近20年的平台设计中得到了广泛的发展应用。
顺应式结构的典型实例是张力腿平台(Tension LegPlatform 简称为TLP)。
张力腿平台最重要的特点是平台的竖向运动很小, 水平方向的运动是顺应式的, 结构惯性力主要是水平方向的回弹力。
张力腿平台的结构造价一般不会随水深增加而大幅度地增大。
近二十年来, 经过张力腿平台设计生产的实践,证明张力腿平台具有良好的运动性能, 是深水海域油气生产适宜的平台形式。
张力腿平台结构张力腿平台(简称TLP)适用于较深水域(300~1500m)、且可采油气储量较大的油田。
TLP 一般由上部模块(Topside)、甲板、船体(下沉箱)、张力钢索及锚系、底基等几部分组成。
其船体(下沉箱)可以是三、四或多组沉箱,下设3~6组或多组张力钢索,垂直与海底锚定。
平台及其下部沉箱受海水浮力,使张力钢索始终处于张紧状态,故在钻井或采油作业时,TLP几乎没有升沉运动和平移运动。
其微小的升沉和平移运动(平移运动仅为水深的1.5% ~2%),在钻井和完井时主要由水中和井内相对细长的钻具及专用短行程补偿器补偿张力腿平台技术特点张力腿式钻井平台是利用绷紧状态下的锚索产生的拉力与平台的剩余浮力相平衡的钻井平台或生产平台。
张力腿式钻井平台也是采用锚泊定位的,但与一般半潜式平台不同。
其所用锚索绷紧成直线,不是悬垂曲线,钢索的下端与水底不是相切的,而是几乎垂直的。
用的是桩锚(即打入水底的桩为锚)或重力式锚(重块)等,不是一般容易起放的抓锚。
张力腿式平台的重力小于浮力,所相差的力量可依靠锚索向下的拉力来补偿,而且此拉力应大于由波浪产生的力,使锚索上经常有向下的拉力,起着绷紧平台的作用。
作用于张力腿式钻井平台上的各种力并不是稳定不变的。
在重力方面会因载荷与压载水的改变而变化;浮力方面会因波浪峰谷的变化而增减;扰动力方面因风浪的扰动会在垂向与水平方向产生周期变化,所以张力腿的设计,必须周密考虑不同的载荷与海况。

深水浮式平台的类型深海有着强大的油气资源储备。
不断涌现的各种新型采油平台技术促进着深海采油技术的高速发展,这些技术概括起来可分为四大类:张力腿式平台(TLP),单筒式平台(SPAR),半潜式平台(SEMI)和浮(船)式生产平台(FPSO)。
在每一大类中,又有很多不同的技术概念。
下面就不同型式的平台使用和特点分别做介绍。
图1:深水平台类型一、深海张力腿平台的发展概况及发展趋势图2:张力腿平台的发展自1954年美国的提出采用倾斜系泊方式的索群固定的海洋平台方案以来,张力腿平台(TLP)经过近50年的发展,已经形成了比较成熟的理论体系。
1984年第一座实用化TLP——Hutton平台在北海建成之后,TLP在生产领域的应用也越来越普遍,逐渐成为了当今世界深海采油领域的两大主力军之一(另一种当前广泛使用的深海采油平台是Spar,将在后面部分中进行详细介绍)。
进入上个世纪90年代之后,TLP平台的发展进一步加速,在生产区域方面,TLP的应用已经从北海和墨西哥湾扩展到了西非沿海;在平台种类方面,TLP已经在原有的传统类型TLP基础上,发展出了Mini-TLP、ETLP等多种新概念张力腿平台,加之不断地采用最新地科学技术,TLP平台在降低成本,提高适应性、稳定性和安全性地道路上取得了长足地进步。
下面将简要介绍张力腿平台的总体结构,然后对1990年之后TLP平台的发展状况进行详细的论述。
1、张力腿平台总体结构简介张力腿平台(TensionLegplatform,简称TLP)是一种典型的顺应式平台,通过数条张力腿与海底相连。
张力腿平台的张力筋腱中具有很大的预张力,这种预张力是由平台本体的剩余浮力提供的。
在这种以预张力形式出现的剩余浮力作用下,张力腿时刻处于受预拉的绷紧状态,从而使得平台本体在平面外的运动(横摇、纵摇、垂荡)近于刚性,而平面内的运动(横荡、纵荡、首摇)则显示出柔性,环境载荷可以通过平面内运动的惯性力而不是结构内力来平衡。

张力腿平台简介一.第一代张力腿平台总述第一代张力腿平台,即传统类型的张力腿平台,应用时间长、分布范围广、平台数量多、设计理论成熟,在张力腿平台发展的历史中占有很重要的地位。
从1984年至今,世界上建成投入生产的传统类型张力腿平台共有11座,尚未发生过倾覆、沉没等重大事故,拥有优良的工作记录,由此坚定了业界对TLP这种新兴海洋平台结构的信心。
在其发展的20年时间里,世界各国的研究者和工程技术人员积累了丰富的设计应用经验和技术数据,为以后张力腿平台的发展打下了坚实的基础。
在已建成的11座传统类型的张力腿平台中,Shell石油公司在1994—2001年7年间连续建造的5座张力腿平台具有一定的代表性,分别为Auger、Mars、Ram、Ursa和Brutus。
通过第一代张力腿平台的生产实践,进一步证明了张力腿平台在深海域半刚性半柔性的优良运动性能和经济性,但是同时亦发现传统的张力腿平台结构形式仍存在着一定的不足。
①在水深超过1200m的极深水水域,随着张力筋腱长度的增加,出现了张力腿自重过大的问题,并且由于张力筋腱在深水中的受力情况发生改变,因此影响了平台的定位性能。
②在降低造价、改善受力情况和运动性能的方面,传统类型张力腿平台的本体结构仍需要进一步改进。
③差频载荷是一个缓慢变化的力,它将和同样缓慢变化的张力腿平台平面内的运动发生共振。
另外,风的激振力也在这个差频范围内,必然会加剧这种慢漂运动。
④波浪的高频分量和高频水动力会引起张力腿平台平面外的共振,通常称为Springing和Ringing。
张力腿平台结构这两个问题随着水深的增加而加剧,对结构的安全性有很大的影响。
⑤传统的张力腿平台是通过海底基础固定入位的,随着水深的增加,海底基础的设计、施工变得十分复杂。
因此,张力腿平台所具有的经济、安全和良好的动力特性在更深水域中均不能得到充分的发挥,传统类型的张力腿平台结构已经不能很好地适应更深的水域。
各国学者对张力腿平台结构形式的不断改进完善非常重视,因此,混合式张力腿平台及悬式张力腿平台等新型的张力腿平台便应运而生二.张力腿平台的工作原理及性能张力腿平台设计最主要的思想是使平台半顺应半刚性。


关于张力腿平台若干术语的定名问题作者:周风啸来源:《中国科技术语》2009年第03期摘要:根据国内外有关文献资料,探讨张力腿平台若干术语的定名问题,给出这些术语的译名和释义。
关键词:张力腿平台,术语,译名,释义张力腿平台(tension leg platform,TLP)是一种主要用于深水作业的海洋平台,1954年由美国人马什(R.Marsh)提出该型平台方案。
TLP的广泛应用是在20世纪90年代以后,特别是在2000年以后。
因此,有关TLP的术语主要也是在近十几年才涌现出来的。
例如,表示TLP高频垂向振动响应现象的“ringing”一词,就是在1993年才开始使用的。
由于这些术语出现的时间太晚,甚至是最新的中外文词典都来不及予以收录,这使其成了阅读和理解TLP技术文件的“拦路虎”。
在此探讨TLP若干术语的定名问题,给出这些术语的译名和释义。
一 TLP概念设计自1984年世界上第一座TLP“赫顿”号问世以来,TLP技术经过了20多年的发展,提出了一系列该型平台的概念设计。
这些设计虽然并未付诸建造,但却为该型平台的研究提供了重要的参考依据,引起了国内外专家学者的重视。
现在,笔者根据这些概念设计的发明者斯里尼万桑(N.Srinivasan)等人-4]的说明,以及中国学者董艳秋等人的介绍,给出它们的译名和释义:悬式张力腿平台(suspended tension leg platform,STLP):一种张力腿平台的概念设计,由贾根纳撒(S.Jagannathan)于1992年提出。
悬式张力腿平台包括上下两个平台,上平台浮力大于自重,下平台浮力小于自重,两者通过张力腿连接。
下平台为悬式平台,具有很大的水下重量,用来平衡上平台的剩余浮力。
张力筏导管架(tension raft jacket,TRJ):一种张力腿平台的概念设计,由阿博特(P.Abbott)等人于1994年提出。
张力筏导管架包括带垂向张力系泊系统的水下浮箱,以及位于该浮箱之上的常规导管架式平台。
张力腿平台的历史、现状和明天一、产生的背景随着全球人口的增加与当今科学技术的发展,人类生存空间逐步向海洋与空中拓展。
海洋蕴藏着丰富的可供人类从事生产、生活的资源,包括石油资源、动力资源、矿产资源、化工资源、生物资源等,海洋是人类开发的主要领域。
目前,全球对海洋的开发利用已经进入日趋完善和成熟的阶段。
根据统计,21世纪将是一个海洋开发利用空前迅猛发展的时期,这种开发也将是全方位的,从现在人类需求来看,海洋开发利用主要集中在以下几方面:①海底石油资源的开发利用;②海底矿物资源的开发利用;③海水及其所含物质资源的开发利用;④海洋作为交通、通信通道的利用;⑤海洋能源(包括波能、潮汐能、温差能等)的开发利用;⑥海洋空间的开发利用。
无论以什么形式对海洋开发利用,都必须以海洋工程设施为桥梁。
近20年来,随着全球对能源需求量的不断增加,各国对海洋油气的勘探和生产更加重视,从而涌现出大量新型的开采设备及其科学的结构形式和先进的检测维修方法。
世界上第一座近海石油平台于1947年建在墨西哥Couissana海域,平台高出水平面6米。
从此以后,各类海上建筑物陆续出现。
海洋工程设施因开发的内容不同其形式也有很大的不同,而对应每一项开发因完成的功能不同其所用的工程设施也有很多不同的形式。
仅就石油开发而言,就拥有百余种海上工程设施。
目前世界海洋石油平台约有2000座。
海洋石油平台按所用建筑材料可分为钢结构石油平台、混凝土石油平台和钢结构混凝土混合平台,其中大多数海洋石油平台是钢结构形式。
钢结构石油平台由钢套管作为油气生产过程中的主要支撑结构。
按平台结构形式又大致分为钢套管平台、重力式平台、顺应式平台。
海洋工程中选择什么样的平台结构形式主要考虑平台所处的海洋环境,包括风、流、浪等载荷,水深,海底地质条件以及平台的安装和组建方法等。
随着海洋开发愈来愈向深海推进,油气资源的开发也不断进军深海。
一般深海海域中自然环境十分恶劣,环境载荷比较复杂,对海洋工程设施的理论分析、设计安装等的要求就更加严格和精确。
张力腿平台张力腿平台发展与简介导管架平台和重力平台由于其自重和工程造价随水深大幅度地增加, 已经不适应深水域油气开发, 所以本世纪60 年代提出了顺应式平台的概念, 并在近20年的平台设计中得到了广泛的发展应用。
顺应式结构的典型实例是张力腿平台(Tension LegPlatform 简称为TLP)。
张力腿平台最重要的特点是平台的竖向运动很小, 水平方向的运动是顺应式的, 结构惯性力主要是水平方向的回弹力。
张力腿平台的结构造价一般不会随水深增加而大幅度地增大。
近二十年来, 经过张力腿平台设计生产的实践,证明张力腿平台具有良好的运动性能, 是深水海域油气生产适宜的平台形式。
张力腿平台结构张力腿平台(简称TLP)适用于较深水域(300~1500m)、且可采油气储量较大的油田。
TLP 一般由上部模块(Topside)、甲板、船体(下沉箱)、张力钢索及锚系、底基等几部分组成。
其船体(下沉箱)可以是三、四或多组沉箱,下设3~6组或多组张力钢索,垂直与海底锚定。
平台及其下部沉箱受海水浮力,使张力钢索始终处于张紧状态,故在钻井或采油作业时,TLP几乎没有升沉运动和平移运动。
其微小的升沉和平移运动(平移运动仅为水深的1.5% ~2%),在钻井和完井时主要由水中和井内相对细长的钻具及专用短行程补偿器补偿张力腿平台技术特点张力腿式钻井平台是利用绷紧状态下的锚索产生的拉力与平台的剩余浮力相平衡的钻井平台或生产平台。
张力腿式钻井平台也是采用锚泊定位的,但与一般半潜式平台不同。
其所用锚索绷紧成直线,不是悬垂曲线,钢索的下端与水底不是相切的,而是几乎垂直的。
用的是桩锚(即打入水底的桩为锚)或重力式锚(重块)等,不是一般容易起放的抓锚。
张力腿式平台的重力小于浮力,所相差的力量可依靠锚索向下的拉力来补偿,而且此拉力应大于由波浪产生的力,使锚索上经常有向下的拉力,起着绷紧平台的作用。
作用于张力腿式钻井平台上的各种力并不是稳定不变的。
深水浮式平台的类型深海有着强大的油气资源储备。
不断涌现的各种新型采油平台技术促进着深海采油技术的高速发展,这些技术概括起来可分为四大类:张力腿式平台(TLP),单筒式平台(SPAR),半潜式平台(SEMI)和浮(船)式生产平台(FPSO)。
在每一大类中,又有很多不同的技术概念。
下面就不同型式的平台使用和特点分别做介绍。
图1:深水平台类型一、深海张力腿平台的发展概况及发展趋势图2:张力腿平台的发展自1954年美国的提出采用倾斜系泊方式的索群固定的海洋平台方案以来,张力腿平台(TLP)经过近50年的发展,已经形成了比较成熟的理论体系。
1984年第一座实用化TLP——Hutton平台在北海建成之后,TLP在生产领域的应用也越来越普遍,逐渐成为了当今世界深海采油领域的两大主力军之一(另一种当前广泛使用的深海采油平台是Spar,将在后面部分中进行详细介绍)。
进入上个世纪90年代之后,TLP平台的发展进一步加速,在生产区域方面,TLP的应用已经从北海和墨西哥湾扩展到了西非沿海;在平台种类方面,TLP已经在原有的传统类型TLP基础上,发展出了Mini-TLP、ETLP等多种新概念张力腿平台,加之不断地采用最新地科学技术,TLP 平台在降低成本,提高适应性、稳定性和安全性地道路上取得了长足地进步。
下面将简要介绍张力腿平台的总体结构,然后对1990年之后TLP平台的发展状况进行详细的论述。
1、张力腿平台总体结构简介张力腿平台(TensionLegplatform,简称TLP)是一种典型的顺应式平台,通过数条张力腿与海底相连。
张力腿平台的张力筋腱中具有很大的预张力,这种预张力是由平台本体的剩余浮力提供的。
在这种以预张力形式出现的剩余浮力作用下,张力腿时刻处于受预拉的绷紧状态,从而使得平台本体在平面外的运动(横摇、纵摇、垂荡)近于刚性,而平面内的运动(横荡、纵荡、首摇)则显示出柔性,环境载荷可以通过平面内运动的惯性力而不是结构内力来平衡。