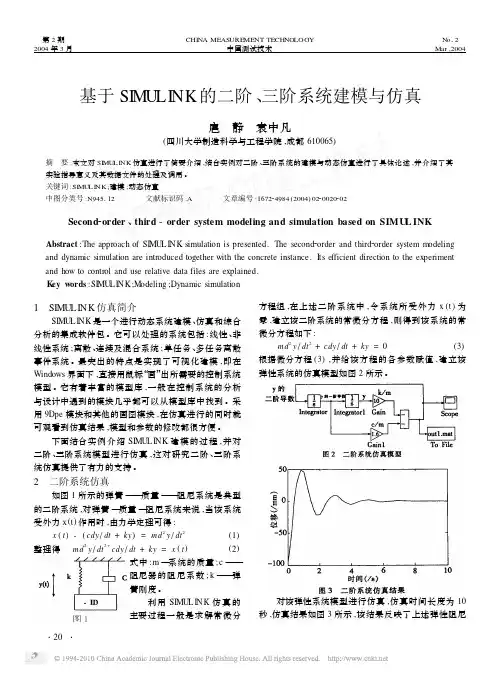
各种仿真系统的模型实例
- 格式:ppt
- 大小:1.24 MB
- 文档页数:41
楼宇温度控制系统simulink仿真1 目的通过建立楼宇温度控制系统,学习simulink常用模块的使用、参数设置以及simulink仿真的基本流程。
2 Matlab相关模块的说明2.1版本:Matlab2017b2.2可能用到的模块加法器:sum,多个变量求和;增益器:Gain,按比例增大输入;积分环节:对输入求积分;Contant:产生一个常量,是source中最常用的一种;Relay:滞环比较器(迟滞比较器),一般用作有波动系统的缓冲;Sin模块:产生正弦信号,模拟交变信号;Scope模块:示波器;Flaoting Scope:浮动示波器(无需连接);Subsystem模块:将基本单元封装成一个模块。
3 楼宇温控系统的组成3.1楼宇温控系统组成加热器(被控对象)、调温器(控制器)和房间(环境)。
和家庭空调系统类似。
系统简图见下图1。
图1 楼宇温控系统简图3.2楼宇温控系统的基本过程1)调温器(Thermostat)对加热器发出加热信号,控制加热器(Heater)启动加热,加热器产生恒定温度的和速率的加热空气。
2)加热气体被送到房间内和房间内空气产生热交换,将房间(Room)空气加热,同时房间内等体积的空气被抽送到加热器,循环加热,直至温度达到设定值,加热器停止加热。
3)房间内的空气和室外空气存在热交换,导致房间内有热量损失。
3.3室内温度控制的机理分析及建模1)楼宇中央空调一般采用恒温输出,即加热器设定温度为固定值(T_Heater=常数,单位℃),加热器输出恒定质量速率的加热气体M(kg/h)。
2)加热器产生的热增益:dQ/dt=M*C*deltaT(热量公式),C 是空气的比热。
3)室内空气与室外空气通过门窗、墙壁等进行热交换。
其作用机理满足热导(热阻)方程:R=(T1-T2)/P,其中P为功率,R为热阻(单位℃/W)则P=(T1-T2)/R,即dQ/dt=P=(T1-T2)/R。
dQ/dt表示室内空气和室外空气进行交换产生的热增益。
【案例分析】经典HFSS仿真实例详解新朋友请点击上⽅RFsister关注我们关于仿真软件HFSS相信⼤家多少都有听过,这是⼀款⾮常强⼤好⽤的仿真软件,已经被应⽤于多个领域,当然,天线设计也离不开仿真软件。
本期⼩编为⼤家带来的是经典天线——对称振⼦天线仿真。
下⾯我们先来看看软件的简介。
HFSS – High Frequency Structure Simulator,Ansoft公司推出的三维电磁仿真软件,⽬前已被ANSYS公司收购;是世界上第⼀个商业化的三维结构电磁场仿真软件,业界公认的三维电磁场设计和分析的⼯业标准。
HFSS提供了⼀简洁直观的⽤户设计界⾯、精确⾃适应的场解器、拥有空前电性能分析能⼒的功能强⼤后处理器,能计算任意形状三维⽆源结构的S参数和全波电磁场。
HFSS软件拥有强⼤的天线设计功能,它可以计算天线参量,如增益、⽅向性、远场⽅向图剖⾯、远场3D图和3dB带宽;绘制极化特性,包括球形场分量、圆极化场分量、Ludwig第三定义场分量和轴⽐。
使⽤HFSS,可以计算:①基本电磁场数值解和开边界问题,近远场辐射问题;②端⼝特征阻抗和传输常数;③ S参数和相应端⼝阻抗的归⼀化S参数;④结构的本征模或谐振解。
⽽且,由Ansoft HFSS和Ansoft Designer构成的Ansoft⾼频解决⽅案,是⽬前唯⼀以物理原型为基础的⾼频设计解决⽅案,提供了从系统到电路直⾄部件级的快速⽽精确的设计⼿段,覆盖了⾼频设计的所有环节。
下⾯我们先来看看建⽴HFSS⼯程的⼀般过程。
(1)⾸先第⼀步是运⾏Ansoft HFSS:(2)然后单击下图红框处图标,在当前⼯程中插⼊⼀个设计:(3)选择求解类型,如下图:(4)为建⽴模型设置合适的单位,如下图:(5)在3D窗⼝中建⽴模型。
(6)设置需要的辐射边界。
(7)如果选择激励求解或激励终端求解,则需要为模型设置激励。
(8)设置求解频率及扫频操作等。
(9)点击下图按钮,检查当前⼯程的有效性。
matlab电气仿真实例MATLAB电气仿真实例在本文中,我们将探讨MATLAB在电气仿真领域中的应用。
通过一个具体的实例,我们将展示如何使用MATLAB进行电气系统的建模、分析和仿真。
1. 引言电气系统的建模和仿真对于设计和分析电路、控制系统、电力系统等具有重要意义。
传统的电气仿真方法需要手动编写大量的数学方程,并且计算过程繁琐。
而MATLAB提供了一种快速、简便且高效的方式来实现电气仿真。
2. 问题描述假设我们有一个简化的直流电机系统。
系统包括一个直流电机、一个电阻和一个电压源。
我们想要分析在给定电压下电机的转速以及电机周围的电压和电流的变化情况。
3. 建立电气系统模型首先,我们需要建立电气系统的数学模型。
在本例中,我们使用电路定律(基尔霍夫定律和欧姆定律)来建立模型。
根据基尔霍夫定律,我们可以得到电路的电流方程:I = \frac{V}{R}其中,I是电流,V是电压,R是电阻。
根据欧姆定律,我们可以得到电机的速度与电压之间的关系:\omega = \frac{V}{K}其中,ω是电机的角速度,V是电压,K是电机的转速常数。
基于这些方程,我们可以进一步建立系统的状态空间模型:\begin{bmatrix} \dot{\omega} \\ \dot{I} \end{bmatrix} =\begin{bmatrix} 0 & \frac{-1}{K} \\ 0 & \frac{-1}{R}\end{bmatrix} \begin{bmatrix} \omega \\ I \end{bmatrix} +\begin{bmatrix} \frac{1}{K} \\ 0 \end{bmatrix} V其中,\dot{\omega}和\dot{I}分别表示电机速度和电流的导数。
4. MATLAB仿真现在我们可以使用MATLAB进行仿真了。
首先,我们需要定义系统的参数和初始条件。
例如,我们可以选择电压源电压为12V,电阻为1Ω,转速常数为10。

菜单系统工具栏设计工具栏仪器仪表工具栏电路图编辑窗口四、定制Multisim用户界面操作:设置菜单栏Option /Preferences中各属性选择元件的符号标准ANSI:美国标准DIN:欧洲标准。
元器件和背景的颜色一、电源库电源库中共有30个电源器件,分别是:●接地端●数字接地端● VCC电压源● VDD数字电压源●直流电压源●直流电流源●正弦交流电压源●正弦交流电流源●时钟电压源●调幅信号源●调频电压源●调频电流源● FSK信号源●电压控制正弦波电压源●电压控制方波电压源●电压控制三角波电压源●电压控制电压源●电压控制电流源●电流控制电压源●电流控制电流源●电流控制电压源●电流控制电流源●脉冲电压源●脉冲电流源图●指数电压源●指数电流源●分段线性电压源●分段线性电流源●压控分段电压源●受控单脉冲●多项式电源●非线性相关电源4、时钟电压源实质上是一个频率、占空比及幅度皆可调的方波发生器二、基本元件库●电阻●虚拟电阻●电容●虚拟电容●电解电容●上拉电容●电感●虚拟电感●电位器●虚拟电位器●可变电容●虚拟可变电容●可变电感●虚拟可变电感●开关●继电器●变压器●非线性变压器●磁芯●无芯线圈●连接器●插座●半导体电阻●半导体电容●封装电阻● SMT电阻● SMT电容● SMT电解电容● SMT电感现实元件虚拟元件“GeneralGeneral””页:元件的一般性资料,包括元件的名称、制造商、创建时间、制作者。
“SymbolSymbol””页:元件的符号。
“ModelModel””页:元件的模型,提供电路仿真时所需要的参数。
Footprint””页:元件封装,提供“Footprint给印制电路板设计的原件外形。
Electronic Parameters””页:“Electronic Parameters元件的电气参数,包括元件在实际使用中应该考虑的参数指标。
编辑电阻元件“User FieldsUser Fields””页:用户使用信息。
matlab连续时间系统的建模与仿真实例标题:深入探讨matlab连续时间系统的建模与仿真实例一、引言在工程领域中,连续时间系统的建模与仿真是非常重要的一环。
使用matlab作为工具可以帮助工程师们更好地理解和分析连续时间系统的行为。
本文将深入探讨matlab在连续时间系统建模与仿真中的实际应用,帮助读者更好地掌握这一领域的知识。
二、连续时间系统建模与仿真概述连续时间系统建模与仿真是指利用数学方法和计算机工具对连续时间系统进行抽象化描述和模拟。
在工程实践中,这一过程可以帮助工程师们更好地理解系统的动态特性、分析系统的稳定性和性能,并设计控制策略以满足特定的需求。
1.连续时间系统建模方法连续时间系统建模的方法有很多种,常用的包括微分方程描述、传递函数描述、状态空间描述等。
在matlab中,可以利用Simulink工具箱来快速构建系统的模型,并进行仿真分析。
2.连续时间系统仿真实例下面我们将以一个简单的例子来展示如何使用matlab对连续时间系统进行建模和仿真。
假设有一个带有阻尼的弹簧质量系统,其运动方程可以描述为:\[ m \frac{d^2 x(t)}{dt^2} + c \frac{dx(t)}{dt} + kx(t) = F(t) \]其中,m为质量,c为阻尼系数,k为弹簧常数,F(t)为外部作用力。
我们希望利用matlab对这个系统进行建模,并仿真系统的动态响应。
三、matlab建模与仿真实例1.建立模型在matlab中打开Simulink工具箱,我们可以直接从库中选择弹簧质量阻尼系统的模块进行快速搭建。
将质量、阻尼、弹簧和外部作用力连接起来,即可构建出系统的模型。
2.参数设定设定系统的参数:m=1kg, c=0.5N/m/s, k=2N/m, 外部作用力F(t)=sin(t)。
3.仿真分析设置仿真时间为10s,运行仿真,观察系统的位移-时间和速度-时间响应。
四、实验结果分析通过matlab进行仿真,我们可以得到系统的位移和速度随时间的变化曲线。

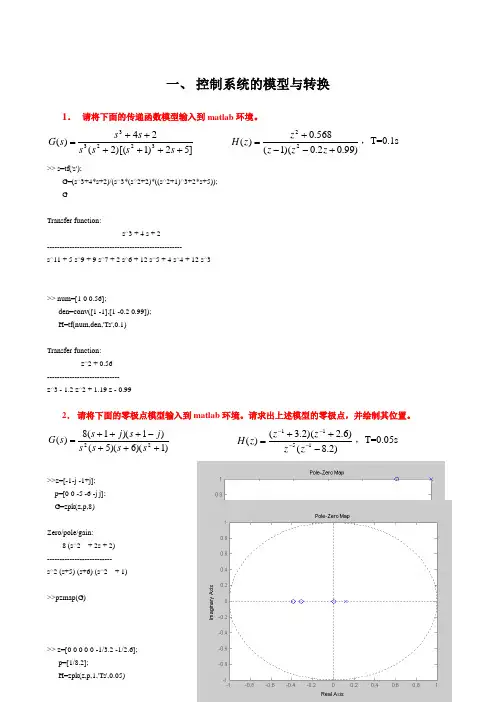
一、 控制系统的模型与转换1. 请将下面的传递函数模型输入到matlab 环境。
]52)1)[(2(24)(32233++++++=s s s s s s s G )99.02.0)(1(568.0)(22+--+=z z z z z H ,T=0.1s >> s=tf('s');G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5)); GTransfer function:s^3 + 4 s + 2 ------------------------------------------------------ s^11 + 5 s^9 + 9 s^7 + 2 s^6 + 12 s^5 + 4 s^4 + 12 s^3>> num=[1 0 0.56];den=conv([1 -1],[1 -0.2 0.99]); H=tf(num,den,'Ts',0.1)Transfer function: z^2 + 0.56 ----------------------------- z^3 - 1.2 z^2 + 1.19 z - 0.992. 请将下面的零极点模型输入到matlab 环境。
请求出上述模型的零极点,并绘制其位置。
)1)(6)(5()1)(1(8)(22+++-+++=s s s s j s j s s G )2.8()6.2)(2.3()(1511-++=----z z z z z H ,T=0.05s>>z=[-1-j -1+j]; p=[0 0 -5 -6 -j j];G=zpk(z,p,8)Zero/pole/gain: 8 (s^2 + 2s + 2) -------------------------- s^2 (s+5) (s+6) (s^2 + 1)>>pzmap(G)>> z=[0 0 0 0 0 -1/3.2 -1/2.6]; p=[1/8.2];H=zpk(z,p,1,'Ts',0.05)Zero/pole/gain:z^5 (z+0.3125) (z+0.3846) ------------------------- (z-0.122)Sampling time: 0.05>>pzmap (H )二、 线性系统分析1. 请分析下面传递函数模型的稳定性。
基于MatlabSimulink的电动汽车仿真模型设计与应用一、本文概述随着全球能源危机和环境污染问题的日益严重,电动汽车作为一种清洁、高效的交通工具,受到了越来越多的关注和推广。
在电动汽车的研发过程中,仿真模型的建立与应用发挥着至关重要的作用。
本文旨在探讨基于Matlab/Simulink的电动汽车仿真模型设计与应用,旨在为电动汽车的设计、优化和控制提供理论支持和实践指导。
本文将对电动汽车仿真模型的重要性进行阐述,指出其在电动汽车研发过程中的地位和作用。
接着,将详细介绍Matlab/Simulink在电动汽车仿真模型设计中的应用,包括其强大的建模功能、灵活的仿真能力以及高效的算法处理能力等。
在此基础上,本文将重点讨论电动汽车仿真模型的设计方法。
包括电动汽车动力系统的建模、控制系统的建模以及整车模型的集成等。
将结合具体案例,对电动汽车仿真模型在实际应用中的效果进行展示和分析,以验证其有效性和可靠性。
本文还将对电动汽车仿真模型的发展趋势进行展望,探讨其在未来电动汽车研发中的潜在应用前景。
通过本文的研究,希望能够为电动汽车仿真模型的设计与应用提供有益的参考和启示,推动电动汽车技术的不断发展和进步。
二、电动汽车仿真模型设计基础电动汽车(EV)仿真模型的设计是一个涉及多个学科领域的复杂过程,其中包括电力电子、控制理论、车辆动力学以及计算机建模等。
在Matlab/Simulink环境中,电动汽车仿真模型的设计基础主要包括对车辆各子系统的理解和建模,以及如何利用Simulink提供的各种模块和工具箱进行模型的构建和仿真。
电动汽车的主要子系统包括电池管理系统(BMS)、电机控制系统(MCS)、车辆控制系统(VCS)以及车辆动力学模型。
这些子系统都需要根据实际的电动汽车设计和性能参数进行精确的建模。
电池管理系统(BMS)建模:电池是电动汽车的能源来源,因此,BMS建模对于电动汽车的整体性能至关重要。
BMS模型需要包括电池的荷电状态(SOC)估计、电池健康状况(SOH)监测、电池热管理以及电池能量管理等功能。
车辆carsim仿真及应用实例1. 简介随着汽车工业的发展,车辆仿真成为了评估和设计新车辆的重要工具。
车辆仿真可以模拟不同汽车的运行行为,并通过各种算法和模型来评估汽车的性能和安全性。
Carsim是一种广泛应用的车辆动力学仿真软件,它可以帮助工程师们更好地理解和改进汽车的性能。
2. Carsim软件的应用领域Carsim软件被广泛用于各种汽车相关领域,包括汽车制造商、汽车研发机构、大学科研部门等。
以下是一些Carsim软件的应用领域:2.1 汽车性能评估Carsim可以准确地模拟汽车在不同条件下的行驶性能,包括加速度、制动性能、悬挂系统等。
工程师们可以通过Carsim对不同车型的性能进行比较和评估,从而选择最佳的设计方案。
2.2 车辆稳定性研究车辆稳定性是汽车安全性的重要指标之一。
Carsim可以根据车辆动力学模型,模拟车辆在不同路面和驾驶条件下的稳定性表现。
工程师们可以通过Carsim研究车辆的操控性能,识别潜在的危险情况并改进车辆的稳定性。
2.3 车辆控制系统开发现代汽车配备了许多复杂的车辆控制系统,例如ABS、ESP等。
Carsim可以模拟这些控制系统的工作原理,并提供数据支持给控制系统的开发人员。
工程师们可以通过Carsim验证和改进车辆控制系统的性能,提高车辆的安全性和操控性。
2.4 高级驾驶辅助系统(ADAS)开发ADAS是现代汽车的重要特性之一,它可以帮助驾驶员避免事故,提升行驶舒适性和安全性。
Carsim可以模拟各种ADAS系统的工作原理,并提供实验数据支持给ADAS系统的开发人员。
工程师们可以通过Carsim研究和改进ADAS系统的性能,提高车辆的智能化水平。
3. Carsim仿真流程Carsim仿真流程包括以下几个主要步骤:3.1 建立车辆模型在Carsim中,首先需要建立一个准确的车辆模型。
该模型需要包括车辆的物理属性、动力学参数和悬挂系统等。
通常可以通过测量和实验来获得这些参数,并将其输入到Carsim中。
OptiSystem仿真模型案例OptiSystem 仿真软件模型案例目录1 1.1 光发送机简介1.2 光发送机设计模型案例:铌酸锂(LiNbO3)型Mach-Zehnder调制器的啁啾(Chirp)分析2 2.1 光接收机简介2.2 光接收机设计模型案例:PIN光电二极管的噪声分析3 3.1 光纤简介3.2 光纤设计模型案例:自相位调制(SPM)导致脉冲展宽分析4 4.1 光放大器简介4.2 光放大器设计模型案例:EDFA的增益优化5 5.1 光波分复用系统简介5.2 光波分复用系统使用OptiSystem设计模型案例:阵列波导光栅波分复用器(AWG )的设计分析6 6.1 光波系统简介6.2 光波系统使用OptiSystem设计模型案例:40G单模光纤的单信道传输系统设计7 8.1 色散简介8.2 色散补偿模型设计案例:使用理想色散补偿元件的色散补偿分析89.1 孤子和孤子系统简介9.2 孤子系统模型设计案例:9 结语1 光发送机(Optical Transmitters)设计1.1 光发送机简介一个基本的光通讯系统主要由三个部分构成,如下图1.1所示:图1.1 光通讯系统的基本构成1)光发送机2)传输信道3)光接收机作为一个完整的光通讯系统,光发送机是它的一个重要组成部分,它的作用是将电信号转变为光信号,并有效地把光信号送入传输光纤。
光发送机的核心是光源及其驱动电路。
现在广泛应用的有两种半导体光源:发光二级管(LED)和激光二级管(LD)。
其中LED输出的是非相干光,频谱宽,入纤功率小,调制速率低;而LD是相干光输出,频谱窄,入纤功率大、调制速率高。
前者适宜于短距离低速系统,后者适宜于长距离高速系统。
一般光发送机由以下三个部分组成:1) 光源(OpticalSource):一般为LED和LD。
2) 脉冲驱动电路(Electrical Pulse Generator):提供数字量或模拟量的电信号。
OptiSystem 仿真实例目录1光发送机(Optical Transmitters)设计1.1光发送机简介1.2光发送机设计模型案例:铌酸锂(LiNbO3)型Mach-Zehnder调制器的啁啾(Chirp)分析2光接收机(Optical Receivers)设计2.1光接收机简介2.2光接收机设计模型案例:PIN光电二极管的噪声分析3光纤(Optical Fiber)系统设计3.1光纤简介3.2光纤设计模型案例:自相位调制(SPM)导致脉冲展宽分析4光放大器(Optical Amplifiers)设计4.1光放大器简介4.2光放大器设计模型案例:EDFA的增益优化5光波分复用系统(WDM Systems)设计5.1光波分复用系统简介5.2光波分复用系统使用OptiSystem设计模型案例:阵列波导光栅波分复用器(AWG )的设计分析6光波系统(Lightwave Systems)设计光波系统简介光波系统使用OptiSystem设计模型案例:40G单模光纤的单信道传输系统设计7色散补偿(Dispersion Compensation)设计色散简介色散补偿模型设计案例:使用理想色散补偿元件的色散补偿分析8孤子和孤子系统(Soliton Systems)孤子和孤子系统简介孤子系统模型设计案例:9结语1 光发送机(Optical Transmitters)设计光发送机简介一个基本的光通讯系统主要由三个部分构成,如下图所示:作为一个完整的光通讯系统,光发送机是它的一个重要组成部分,它的作用是将电信号转变为光信号,并有效地把光信号送入传输光纤。
光发送机的核心是光源及其驱动电路。
现在广泛应用的有两种半导体光源:发光二级管(LED)和激光二级管(LD)。
其中LED输出的是非相干光,频谱宽,入纤功率小,调制速率低;而LD是相干光输出,频谱窄,入纤功率大、调制速率高。
前者适宜于短距离低速系统,后者适宜于长距离高速系统。