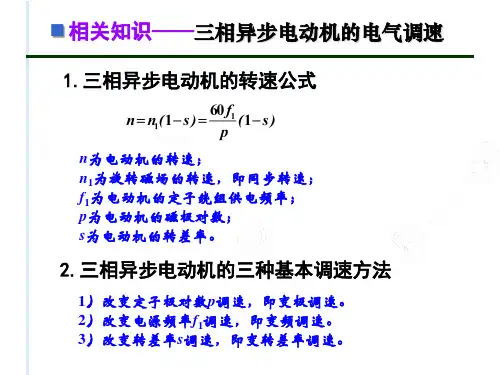
三速电动机变极调速控制设备的设计
- 格式:doc
- 大小:831.00 KB
- 文档页数:60
课程设计三速电动机变极调速控制系统设计学生姓名:学号:电大分校:四○四厂电大分校工作站(教学点):四○四厂电大分校学生所在单位:四○四厂三速电动机变极调速控制系统设计前言:一.总体方案确定根据该车间的实际情况,全年送风量划分为三个时间段,即夏季、春秋季和冬季。
由风机特性可知,当风机转速从n变到n’时,风量Q和轴功率P的变化关系式如下:Q’=Q(n’/n)P’=P(n’/n)3根据已知技术数据,春秋季的风量为夏季的66%,冬季的风量为夏季风量的50%,所以需对拖动风机的电动机进行调速控制。
达到夏季风量所需电动机功率为11.6KW,转速为1457r/min,所以我们所选电动的最大功率和转速只要满足大于、等于11.6LW和1457r/min,控制设备能实现对该电动机调速即可满足设计的技术要求。
异步电机调速可采用:调压调速、电磁调速电动机调速、串级调速、变频调速和变极调速等。
前几种调速方案都可实现对电动机的无极调速,但实现调速的控制设备和设备方案都比较复杂,经济投入较大。
只有变极调速为有级调速,控制设备相对较简单,经济投入较少。
根据设计技术数据,该车间全年要求的风量变化是分段的,所以不需要采用无级调速即可达到设计要求。
变极调速的控制一种情况可用电器控制设备实现拖动控制要求,另一种方法是采用先进的PLC控制技术,大幅度降低安装工程量,节省空间及今后打的检修工作量。
综合考虑选用PLC实现调速控制。
二.电动机的选择根据风量分段的要求,我们选用变极三速电动机实现对风机的控制。
该车间对湿度要求比较严格,为防止电机由于潮湿造成损坏,我们选择电机外壳防护等级为IP44.设风机在夏季,春秋季和冬季的风量分别为Q1,Q2,Q3,转速分别为n1,n2,n3,轴功率分别为P1,P2,P3.由已知条件即得:Q2:Q1=0.66Q3:Q1=0.50P1=11.6KWn 1=1457r/minQ ’=Q(n ’/n)n 2=n 1(Q 2/Q 1)=1457×0.66=962r/minn 3=n 1(Q 3/Q 1)=1457×0.50=729r/minP 2=P 1(Q 2/Q 3)3=11.6×0.663=3.3KWP 3=P 1(Q 3/Q 1)3=11.6×0.53=1.5KW由此可知,风机夏季,春秋季,冬季三个调速点要求的转速分别为1457r/min ,962r/min ,729r/min ,要求的功率分别为11.6KW ,3.3KW ,1.5KW 。

力辉电机
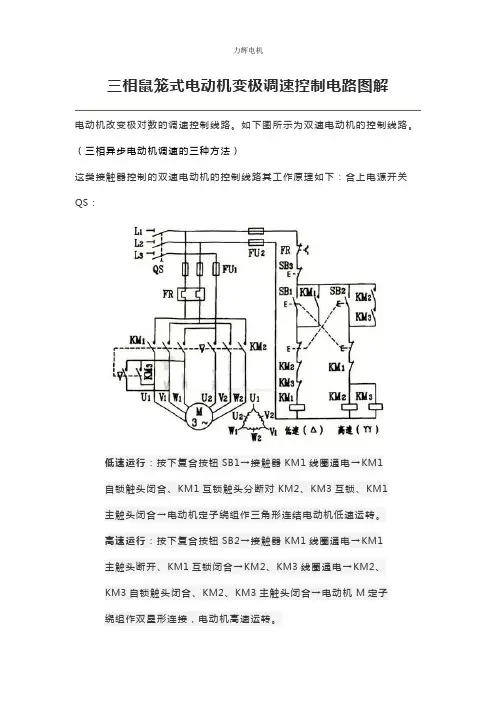
三相鼠笼式电动机变极调速控制电路图解
电动机改变极对数的调速控制线路。
如下图所示为双速电动机的控制线路。
(三相异步电动机调速的三种方法)
这类接触器控制的双速电动机的控制线路其工作原理如下:合上电源开关QS:
低速运行:按下复合按钮SB1→接触器KM1线圈通电→KM1
自锁触头闭合、KM1互锁触头分断对KM2、KM3互锁、KM1
主触头闭合→电动机定子绕组作三角形连结电动机低速运转。
高速运行:按下复合按钮SB2→接触器KM1线圈通电→KM1
主触头断开、KM1互锁闭合→KM2、KM3线圈通电→KM2、
KM3自锁触头闭合、KM2、KM3主触头闭合→电动机M定子
绕组作双星形连接,电动机高速运转。
三相异步电机交流变频调速系统设计实验指导书仇国庆编写重庆邮电大学自动化学院测控技术实验中心2010/11/2三相异步电机交流变频调速系统设计实验指导书一、实验目的:1. 了解三相异步电机调速的方法;2. 熟悉交流变频器的使用;3. 掌握三相异步电机交流变频调速系统设计。
4. 交流异步电动机机械特性及变频调速特性测试二、控制系统设计要求系统设计要求能够实现三相异步电动机的如下状态的控制:正转;反转;停止;点动;加速;减速。
图1 控制系统硬件结构图三、基本知识:1.异步电动机调速系统种类很多,常见的有:(1)降电压调速;(2)电磁转差离合器调速(3)绕线转子异步电机转子串电阻调速(4)绕线转子异步电机串级调速(5)变极对数调速(6)变频调速等等。
2.三相交流异步电动机2.1 异步电动机旋转原理异步电动机的电磁转矩是由定子主磁通和转子电流相互作用产生的。
n转速顺时针旋转,转子绕组切割磁力线,产生转子电流⑴磁场以⑵通电的转子绕组相对磁场运动,产生电磁力⑶ 电磁力使转子绕组以转速n 旋转,方向与磁场旋转方向相同2.2 旋转磁场的产生旋转磁场实际上是三个交变磁场合成的结果。
这三个交变磁场应满足:⑴ 空间位置上互差rad 3/2π电度角。
由定子三相绕组的布置来保证⑵ 在时间上互差rad 3/2π相位角(或1/3周期)。
由通入的三相交变电流来保证。
2.3 电动机转速产生转子电流的必要条件:是转子绕组切割定子磁场的磁力线。
因此,转子的转速n 必须低于定子磁场的转速0n 。
两者之差称为转差:n n n -=∆0转差与定子磁场转速(常称为同步转速)之比,称为转差率:0/n n s ∆=同步转速0n 由下式决定:p f n /600=上式中,f 为输入电流的频率,p 为旋转磁场的极对数。
由此可得转子的转速:p s f n /)1(60-=3.异步电动机调速由转速p s f n /)1(60-=可知异步电动机调速有以下几方法:(1) 改变磁极对数p (变极调速)定子磁场的极对数取决于定子绕组的结构。
高等教育自学考试本科毕业论文基于PLC的三相异步电机变频调速系统的设计考生姓名:彭中建准考证号: 011811306047 专业层次:本科院(系):机械与动力工程学院指导教师:唐晓庆职称:讲师重庆科技学院二O一三年七月十五日高等教育自学考试本科毕业论文基于PLC的三相异步电机变频调速系统的设计考生姓名:彭中建准考证号: 011811306047专业层次:本科指导教师:***院(系):机械与动力工程学院重庆科技学院二O一三年七月十五日摘要随着科技的进步,电机的运用已经深入到各行各业的各个领域。
而现今也是一个资源高度消耗造成能源匮乏的时代,在这个时候考虑如何让其在高可靠性的同时又有效的节约能源耗费提高自身的效率,这不仅可以使企业的生产成本降低,而且对于社会的可持续发展有着重要的意义。
本文所讨论的是利用PLC控制的三相异步电机变频调速的基本原理与实现方法。
三相异步电机一般的调速方法有:降压调速,转子回路串电阻调速,变极调速,串极调速,变频调速等。
但是这些调速方法都有着各自的缺点,降压调速的调速范围很小,没有多大的实用价值;转子回路串电阻调速不利于空载或轻载调速,效率低,经济性差;变极调速调速的平滑性差;串极调速的控制设备复杂,成本高,控制困难。
所以调速性能至少需从两方面考虑。
第一,应从节能和提高效率的角度考虑,应将损耗在转子附加电阻上的能量吸收,转化成别的有用的能量或反馈到电网,以提高传动系统的效率。
第二,应从高性能调速要求考虑,应用控制理论,将其组成闭环调速控制系统,满足调速精度、动态响应等各项指标的要求。
综上所述,利用PLC控制的变频调速系统,是使三相异步电动机实现高性能高效率调速的有效办法。
通过改变定子绕组的供电频率f来实现,当转差率s一定时,电动机的转速n基本上正比于f。
很明显,只要有输出频率可以平滑调节的变频电源,就能平滑的调节异步电动机的转速。
关键词:变频调速,PLC,异步电机The three-phase asynchronous motor variable frequency speed regulation system based on PLC designAbstractHuman being is seriously threatened by exhausting mineral fuel, such as coal and fossil oil. As a kind of new type of energy sources, solar energy has the advantages of unlimited reserves, existing everywhere,using clean and economical .But it also has disadvantages ,such as low density,intermission,change of space distributing and so on. These make that the current series of solar energy equipment for the utilization of solar energy is not high. In order to keep the energy exchange part to plumb up the solar beam,it must track the movement of solar.In this paper, the solar tracking system of the mechanical part and control system part are designed.Mechanical structure mainly includes the main spindle, stepping motors, gears and gear ring, and so on. When the sun's rays has a deviation, small gear are rotated by stepper motor according to the control signal from MCU. And the large gear and main spindle is rotated by small gear in order to track to achieve the level direction.At the same time, another small gear is rotated by another stepper motor according to the control signal.And the large gear and the solar panels are rotated by the small gear in order to track to achieve the vertical direction. Solar is tracked by the two stepper motors together.Control system mainly includes the sensors part, stepper motor, MCU system and the corresponding external circuit, and so on. Photoelectric detection system is used to track solar. Sensors use photosensitive resistance. The two same photosensitive resistances were placed in east and west direction of the bottom edge .When the two photosensitive resistances received different light at the same time, the signal from comparison circuit is sent to MCU in order to rotate stepping motors.Keywords: Frequency control, PLC, asynchronous motor目录中文摘要 (I)英文摘要 ........................................................................................... 错误!未定义书签。
三项异步电动机变频调速控制及其节能改造本文主要从三项异步电动机概述、三相笼型转子异步电动机的传统起动方式、三相异步电动机调速策略探讨、电动机节能注意事项等方面进行了阐述。
标签:三相异步电动机;调速;节能一、前言三项异步电动机在我国电网中应用非常广泛,技术也相对成熟,但是如何使其变频调速进行控制以及节能问题,都是需要进一步探讨与总结的重点问题。
二、三项异步电动机概述全国年总发电量的一半以上,耗能非常之高。
因此,加强和提高三相异步电动机的节能控制对我国电能的节约将会起到巨大的作用。
当电流在满负荷的情况下时,三相异步电动机的功效一般比较的高,可以达到85%左右。
但是,如果电流的负荷量下降的话,三相异步电动机的功效就会明显的降低。
因此,总的来说,三相异步电动机的功效还是比较低的。
如果我们通过对三相异步电动机节能控制,我们就会在这方面有所提高,从而提升电动机的运行效率,将会产生巨大的经济效益。
进行三相异步电动机的节能控制主要是从两方面的工作着手,首先就是要提升三相异步电动机的制造技术,而这方面如今已经取得了巨大的发展,另外一方面就是要做好电动机的运行控制技术,这才是我们进行电动机节能控制技术的关键。
三相异步电动机的功效是指三相异步电动机的输出功效同输入功效的比例,因此供电机的一部分电能是用来使电动机驱动的,即输入的功效,而另外一部分电能就会发生在三相异步电动机的自身损耗上,这就是我们所说的输出功效。
三相异步电动机的电能损耗主要是指电动机的铁和铜,而电动机的铜耗则是在电流通过电动机的铜线绕组时而产生的,相比之下,电动机的铁耗则是指电动机在运转的过程中,其定子和转子铁芯中产生的电流而发生的损耗,这主要是与电压有关。
电动机的损耗除了这两部分损耗外,还存在其他的损耗,但是这些损耗都比较小,可以忽略。
而三相异步电动机的节能原理就是在电压的负荷下降的时候,可以通过适当降低电源的电压的方法,从而减少电动机中铁耗,当电压下降的时候,相应的电流也会随之下降,这样也就降低了电动机中的铜耗,只有这样电动机的功效才会得到提高。
三相异步电动机的调速控制-变极调速电磁调速变极调速不能实现连续平滑调速,只能得到几种特定的转速。
但在很多机械中,要求转速能够连续无级调节,并且有较大的调速范围。
目前除了用变频器进行无级调速外,还有较多用调电磁转差率进行的调速,也就是电磁转差离合器调速,其优点是结构简单、维护方便、运行可靠、能平滑调速,采用闭环系统可扩大调速范围;缺点是调速效率低,低速时尤为突出,不宜长期低速运行,且控制功率小,机械特性较软。
1.电磁转差离合器的结构及工作原理电磁转差离合器调速系统是在普通笼型异步电动机轴上安装一个电磁转差离合器,由晶闸管控制装置控制离合器绕组的励磁电流来实现调速。
异步电动机本身并不调速,调节的是离合器的输出转速。
电磁转差离合器(又称滑差离合器)的基本原理就是基于电磁感应原理,实质上就是一台感应电动机,其结构如图所示。
下图(a)所示为电磁转差离合器结构,它是由电枢和磁极两个旋转部分组成:一个称为磁极(内转子),另一个称为电枢(外转子),两者之间无机械联系,均可自由旋转。
当磁极的励磁线圈通过直流电流时,沿气隙圆周表面的爪极便形成若干对极性相互交替的空间磁场。
当离合器的电枢被电动机拖动旋转时,由于电枢与磁场间有相对移动,在电枢内就产生涡流;此涡流与磁通相互作用产生转矩,带动磁极按同一方向旋转。
无励磁电流时,磁极不会跟着电枢转动,相当于磁极与电枢“离开”,当磁极通入励磁电流时,磁极即刻跟随电枢旋转,相当于磁极与电枢“合上”,故称为“离合器”。
因它是根据电磁感应原理工作的,磁极与电枢之间必须有转差才能产生涡流与电磁转矩,故又称“电磁转差离合器”。
因为工作原理和异步电动机相似,所以又将它及与其相连的异步电动机一起称为“滑差电动机”。
电磁转差离合器的磁极转速与励磁电流的大小有关。
励磁电流越大,建立的磁场越强,在一定转差率下产生的转矩越大。
当负载一定时,励磁电流不同,转速就不同,只要改变电磁转差离合器的励磁电流,即可调节转速。
课程设计任务书一.设计题目三速电动机变极调速控制系统设计二.设计目的1.培养综合运用所学知识和技能分析解决工程技术问题的能力。
2.建立正确的设计思路,掌握电气传动控制系统工程设计的一般程序和方法。
三.设计技术数据和技术要求本设计要求通过控制风机风量实现对整个车间温度的控制。
某车间的基本情况为全年温度波动值允许在8~10℃范围内,一般要求不高。
但对相对湿度的控制较严,全年波动范围要控制在5%~10%,它直接关系到产品的质量。
该车间的内部热源是机械摩擦生热,灯具发热,人体散热等,它们在全车间几乎不变;而外部热源——室外大气温度,则随夏日的日照,冬天的寒流,四季的阴、晴、雨、雪等气象条件变化而变化,而且是影响车间温度,湿度变化的主要原因。
故车间温度、湿度的控制随季节变化采用变风量,变露点调节法实现,这又都通过改变轴流风机的风量来实现。
根据该车间实际情况,要求四季风量的夏季最高,春秋两季相差不多,约为夏季的66%,冬季最少,约为夏季的50%。
经过设计,达到夏季风量的轴流风机对应的控制电动机功率为11.6KW,转速为1457r/min。
对控制设备要求为在控制风机风量时,风量改变要尽可能平稳,不能一下从最小变到最大或从最大变到最小,应有中间的过渡。
风机启动时风量也应该为最小值启动,具有过载等必要保护及必要的工作状态指示,电动机定子电流指示以及控制设备的故障指示。
车间内部具有交流电压为380V,频率为50Hz的三相四线制电源。
四.要求1.设计一套能实现轴流风机控制,满足车间全年温度湿度控制要求的控制系统,设计方案要尽可能简单、经济、安全。
2.完成三速电动机变极调速控制系统的设计,在设计中提高识图与制图能力,掌握查阅手册及使用国家技术标准和信息资料检索的能力。
3.按规定的进度,及时完成相应的设计任务。
五.具体要求1.设计完成电气控制原理图一张。
2. 根据控制要求及电动机容量选择电器元件。
3. 根据控制要求设计梯形图,编号控制程序,并上机调试。
三相异步电动机的调速控制-变极调速变极调速一般仅适用于笼型异步电动机。
变极电动机一般有双速、三速、四速之分,双速电动机定子装有一套绕组,而三速、四速电动机为两套绕组。
变极调速的原理和控制方法基本相同,这里以双速异步电动机为例进行分析。
1.双速异步电动机定子绕组的联结方式双速异步电动机是靠改变定子绕组的连接,形成两种不同的极对数,获得两种不同的转速。
双速异步电动机定子绕组常见的接法有△/YY和Y/YY两种。
双速电动机定子绕组接线图如图所示,通过改变定子绕组上每个线圈两端抽头的联结,图(a)由三角形改为双星形,图(b)由星形改为双星形,两种接线方式变换成双星形均使极对数减少一半,转速增加一倍。
双速异步电动机调速的优点是可以适应不同负载性质的要求,如需要恒功率调速时可采用三角形→双星形转换接法,需要恒转矩调速时采用星形→双星形转换接法,且线路简单、维修方便;缺点是只能有级调速且价格较高,通常使用时与机械变速配合使用,以扩大其调速范围。
注意:当定子绕组由三角形联结(各相绕组互为240°电角度)改变为双星形联结(各相绕组互为120°电角度)时,为保持变速前后电动机转向不变,在改变极对数的同时必须改变电源相序。
2.双速异步电动机控制线路下图所示为时间继电器控制的双速异步电动机自动控制线路。
图中SA为选择开关,选择电动机低速运行或高速运行。
当SA置于“低速”位置时,接通KM1线圈电路,电动机直接启动低速运行。
当 SA 置于“高速”位置时,时间继电器的瞬时触头闭合,同样先接通KM1线圈电路,电动机绕组三角形接法低速启动,当时间继电器延时时间到时,其延时断开的常闭触头KT断开,切断KM1线圈回路,同时其延时接通的常开触头KT闭合,接通接触器 KM2、KM3 线圈并使其自锁,电动机定子绕组换接成双星形接法,改为高速运行。
此时KM3的常闭触头断开使时间继电器线圈失电停止工作。
所以该控制线路具有使电动机转速自动由低速切换至高速的功能,以降低启动电流,适用于较大功率的电动机。
天津职业技术师范大学课程设计说明书题目:三相异步电动机变频调速系统设计及仿真指导老师:班级:机检1112班组员天津工程师范学院课程设计任务书机械工程学院机检1112 班学生课程设计课题:三相异步电动机变频调速系统设计及仿真一、课程设计工作日自 2015 年 1 月 12 日至 2015 年 1 月 23 日二、同组学生:三、课程设计任务要求(包括课题来源、类型、目的和意义、基本要求、完成时间、主要参考资料等):1、目的和意义交流调速是一门重要的专业必修课,它具有很强的实践性。
为了加深对所学课程(模拟电子技术、数字电子技术、电机与拖动、电力电子变流技术等)的理解以及灵活应用所学知识去解决实际问题,培养学生设计实际系统的能力,特开设为期一周的课程设计。
2、具体内容写出设计说明书,内容包括:(1)各主要环节的工作原理;(2)整个系统的工作原理(包括启动、制动以及逻辑切换过程);(3)调节器参数的计算过程。
2.画出一张详细的电气原理图;3.采用Matlab中的Simulink软件对整个调速系统进行仿真研究,对计算得到的调节器参数进行校正,验证设计结果的正确性。
将Simulink仿真模型,以及启动过程中的电流、转速波形图附在设计说明书中。
4、考核方式1.周五采用口试方式进行考核(以小组为单位),成绩按百分制评定。
其中小组分数占60%,个人成绩占40%(包括口试情况和上交材料内容);2.每天上午8:30--11:30在综合楼226房间答疑。
五、参考文献1、陈伯时.电力拖动自动控制系统----运动控制系统(第3版).机械工业出版社,2003指导教师签字:教研室主任签字:目录第一章绪论 (2)第二章系统总体设计方案 (4)2.1 概述 (4)2.2系统组成结构及工作原理 (4)2.2.1恒压频比控制下的机械特性 (4)2.2.2变频器 (6)2.2.3变频器主电路工作原理 (6)2.2.4整流电路 (7)2.2.5逆变电路 (7)2.2.6调节器 (9)2.2.7启动制动 (10)第三章硬件设计及选型 (11)3.1主电路的设计 (11)3.2整流电路设计 (11)3.3逆变电路的设计 (12)第四章simulink仿真 (13)4.1建立模型 (13)4.2 未变频时仿真结果 (14)4.3变频时仿真结果(基频以下调速) (15)4.4变频时仿真结果(基频以上调速) (17)关于变频调速的总结 (18)附电气图 (19)参考文献 (19)第一章绪论在交流调速中,交流电动机的调速方法有三种:变极调速、改变转差率调速和变频调速。