《航海学—天文、地文、仪器》教学课件—10航海仪器
- 格式:ppt
- 大小:25.76 MB
- 文档页数:226
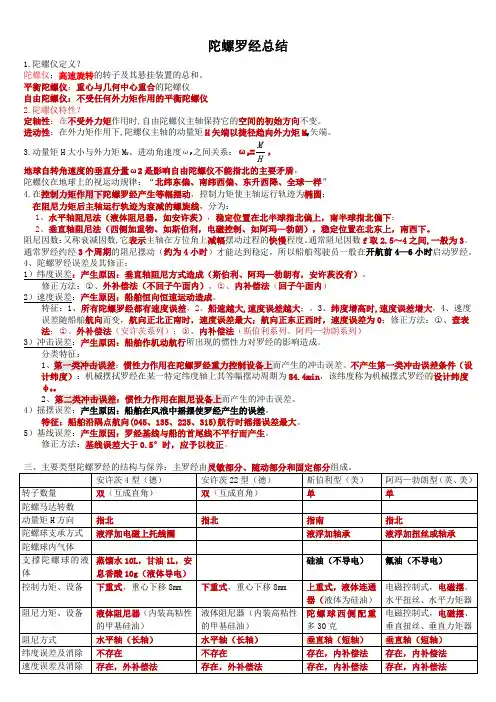
陀螺罗经总结1.陀螺仪定义?陀螺仪:高速旋转的转子及其悬挂装置的总和。
平衡陀螺仪:重心与几何中心重合的陀螺仪自由陀螺仪:不受任何外力矩作用的平衡陀螺仪 2.陀螺仪特性?定轴性:在不受外力矩作用时,自由陀螺仪主轴保持它的空间的初始方向不变。
进动性:在外力矩作用下,陀螺仪主轴的动量矩H 矢端以捷径趋向外力矩M Y 矢端。
3.动量矩H 大小与外力矩M Y 、进动角速度ωP 之间关系:ωP =, 地球自转角速度的垂直分量ω2是影响自由陀螺仪不能指北的主要矛盾。
陀螺仪在地球上的视运动规律:“北纬东偏、南纬西偏、东升西降、全球一样” 4.在控制力矩作用下陀螺罗经产生等幅摆动,控制力矩使主轴运行轨迹为椭圆; 在阻尼力矩后主轴运行轨迹为衰减的螺旋线,分为:1、水平轴阻尼法(液体阻尼器,如安许茨),稳定位置在北半球指北偏上,南半球指北偏下;2、垂直轴阻尼法(西侧加重物、如斯伯利,电磁控制、如阿玛—勃朗),稳定位置在北东上,南西下。
阻尼因数:又称衰减因数,它表示主轴在方位角上减幅摆动过程的快慢程度。
通常阻尼因数f 取2.5~4之间,一般为3。
通常罗经约经3个周期的阻尼摆动(约为4小时)才能达到稳定,所以船舶驾驶员一般在开航前4—6小时启动罗经。
4、陀螺罗经误差及其修正:1)纬度误差:产生原因:垂直轴阻尼方式造成(斯伯利、阿玛—勃朗有,安许茨没有)。
修正方法:○1、外补偿法(不回子午面内),○2、内补偿法(回子午面内) 2)速度误差:产生原因:船舶恒向恒速运动造成。
特征:1、所有陀螺罗经都有速度误差,2、船速越大,速度误差越大;。
3、纬度增高时,速度误差增大,4、速度误差随船舶航向而变,航向正北正南时,速度误差最大;航向正东正西时,速度误差为0;修正方法:○1、查表法;○2、外补偿法(安许茨系列);○3、内补偿法(斯伯利系列、阿玛—勃朗系列) 3)冲击误差:产生原因:船舶作机动航行所出现的惯性力对罗经的影响造成。


第一篇航海学地文航海航海学是一门研究船舶如何安全、经济地从一个港口(地点)航行到另一港口(地点)的实用性学科。
航海学主要研究下列课题:1.拟定一条安全、经济的航线和制定一个切实可行的航行计划。
2.航迹推算,包括航迹绘算和航迹计算两种方法。
航迹推算是指根据船上最基本的航海仪器(罗经和计程仪)所指示的航向和航程,结合海区内的风流要素和船舶操纵要素,不借助外界物标或航标,从某一已知船位起,推算出具有一定精度的航迹和某一时刻的船位的方法。
它是驾驶员在任何情况下,求取任何时刻的船位的最基本的方法,也是陆标定位、天文定位和电子定位的基础。
3.测定船位(简称定位),包括陆标定位、天文定位和电子定位三种。
陆标定位是指观测海图上标有准确位置的,并可供目视或雷达观测的山头、岛屿、岬角、灯塔等显著的固定物标与本船的某一(某些)相对位置关系,如方位、距离和方位差等,从而在海图上确定本船船位的方法和过程。
陆标定位一般可分为方位定位、距离定位、方位距离定位和移线定位等。
天文定位是指在海上利用航海六分仪观测天体(太阳、月亮和部分星体)高度来确定船舶位置的一种定位方法。
电子定位是指利用船舶所装备的无线电定位系统的接收机来测定本船位置的一种定位方法。
目前,普遍使用的有GPS定位系统和罗兰C定位系统。
船舶航行中,要求航海人员尽一切可能随时确定本船的船位所在。
这样,才可能结合海图,了解船舶周围的航行条件,及时采取适当、有效的航行方法和必要的航行措施,确保船舶安全、经济地航行。
航迹推算和定位是船舶在海上确定船位的两类主要方法。
4.航行方法,研究在各种航海条件下的航行方法,如沿岸航行、狭水道航行和特殊条件下的航行等。
为了研究上述课题,航海学还必须包括航海学基础知识和航路资料等基本内容。
其中,航海学基础知识主要包括坐标、方向和距离,以及海图两大部分内容;航路资料主要包括:潮汐与潮流、航标与《航标表》和航海图书资料等内容。
第一章坐标、方向和距离第一节地球形状和地理坐标一、地球形状航海上船舶和物标的坐标、方向和距离等,都是建立在一定形状的地球表面的,要研究坐标、方向和距离等航海基本问题,必须首先对地球的形状和大小作一定的了解。