欧姆龙G伺服切换W伺服经验分享
- 格式:docx
- 大小:937.43 KB
- 文档页数:6


欧姆龙PLC如何实现断电保持伺服位置及原点
做含有伺服的项目时,通常会把伺服的实时位置显示在触摸屏上以方便查看伺服当前位置。
欧姆龙PLC的话要么直接监控伺服当前位置寄存器,要么使用一个传送指令将伺服当前位置传到我们规划好的寄存器中,如图所示:
这样使用正常情况下没问题,但是如果断电的话,原点会丢失,如果不是绝对值编码器伺服,当前位置也会清零,那怎么解决?
第一次循环标志(常开)INI #0 #2 D310第一次循环标志(常闭)PRV #0 #0 D310
程序如下
这样设备断电后当前位置不会清零,同时原点也不会丢失,无需再次回原点。
如果使用该方法就不能再有传送的程序,如下图程序断电后就无法保持伺服位置及原点
相关指令含义。
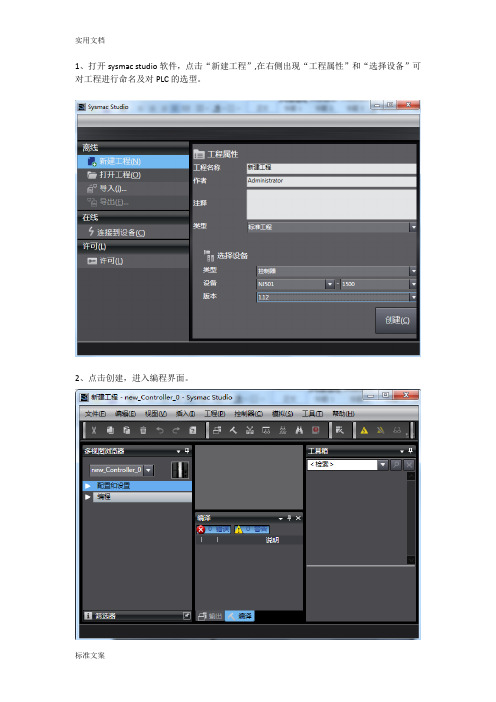
1、打开sysmac studio软件,点击“新建工程”,在右侧出现“工程属性”和“选择设备”可对工程进行命名及对PLC的选型。
2、点击创建,进入编程界面。
3、点击“配置和设置”,选择EtherCat,选择“主设备”可在“工具箱”中全部供应商选择具体的设备,如:伺服、远程I/O、模拟量等。
如果是添加非欧姆龙的伺服需添加ESI文件,点击“主设备”邮件,选择“显示ESI库”,点击“ESI库”下方绿色的“该文件夹”可添加对应厂家伺服的ESI文件,然后关闭软件,重新进入就可以选择刚刚添加的ESI文件。
以(I/O 和欧姆龙伺服为例)点击E001或者E002,可对节点地址进行修改。
4、点击E002,右侧出现PDO参数设置,点击“编辑PDO映射设置”可增加或者删除PDO 注意:分布式时钟有限必须为启用状态。
5、点击“运动控制轴”,选择“轴设置”右键,添加“运动控制轴”,出现默认轴“MC_Axis000(0)”双击“MC_Axis000(0)”对伺服的相应参数进行设置。
6、轴使用:“使用的轴”,轴类型:“伺服器轴”,输出设备1:“选择对应的伺服”点击下方“详细设置”就可以对需要用到的伺服变量进行设置,如果有的选择了“设备”在对应的“过程数据”中未找到相关数据,可按照第四步中的PDO参数设置进行添加对应的PDO。
7、单位换算设置:本文以20精度的伺服为例对参数进行设置。
8、操作设置:因更改了伺服精度参数,操作设置有错误,对最大速度及最大点进速度进行修改皆可以避免错误问题。
9、原点返回设置:根据实际需求自行设置。
10、点击“编程”,“Program”,双击“Selection”,就可进行程序编写。
11、基于伺服的小程序:启动、使能、绝对位移、相对位移、回原。
12、在编写多段程序的时候,“需在任务设置”当中的“程序分配设置”点击程序名下方的“+”增加对应的程序,否则无法运行及监控。
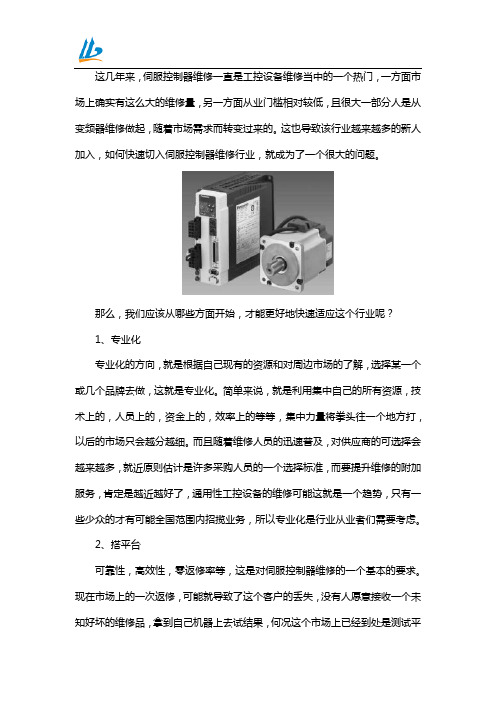
这几年来,伺服控制器维修一直是工控设备维修当中的一个热门,一方面市场上确实有这么大的维修量,另一方面从业门槛相对较低,且很大一部分人是从变频器维修做起,随着市场需求而转变过来的。
这也导致该行业越来越多的新人加入,如何快速切入伺服控制器维修行业,就成为了一个很大的问题。
那么,我们应该从哪些方面开始,才能更好地快速适应这个行业呢?1、专业化专业化的方向,就是根据自己现有的资源和对周边市场的了解,选择某一个或几个品牌去做,这就是专业化。
简单来说,就是利用集中自己的所有资源,技术上的,人员上的,资金上的,效率上的等等,集中力量将拳头往一个地方打,以后的市场只会越分越细。
而且随着维修人员的迅速普及,对供应商的可选择会越来越多,就近原则估计是许多采购人员的一个选择标准,而要提升维修的附加服务,肯定是越近越好了,通用性工控设备的维修可能这就是一个趋势,只有一些少众的才有可能全国范围内招揽业务,所以专业化是行业从业者们需要考虑。
2、搭平台可靠性,高效性,零返修率等,这是对伺服控制器维修的一个基本的要求。
现在市场上的一次返修,可能就导致了这个客户的丢失,没有人愿意接收一个未知好坏的维修品,拿到自己机器上去试结果,何况这个市场上已经到处是测试平台的情况下。
功夫再深,也没有看着伺服带着电机转让人确信。
3、备库存搭平台的目的无非就是实现快速高效的伺服控制器维修服务,以前也许这两样就可以了,但现在仅仅这样就不够了,还得备足库存,高效的一个重要衡量标准就是要快,三个小时,二个小时,一个小时.....越来越快。
然而较为直接的就是换板,换配件,价格在不断走下坡路了,但服务却要始终跟得上市场,目前就跟得上市场,在这些通用伺服控制器的维修上,就只能走量了,流水线式作业,大批量的维修,库存是保证。
综上所述,就是关于伺服控制器维修的几点从业经验,一些刚接触的新人小白可以多多参考。
杭州联凯机电工程有限公司成立于2011年,是一家专业从事工业自动化设备销售、维护及电气系统维修改造的高科技公司。

伺服电机高速换向方法 说实话伺服电机高速换向这事儿,我一开始也是瞎摸索。我就想着这应该不难吧,结果一上手就懵了。
我一开始试着直接改变电机的输入电压极性来实现换向,觉得这是最直接的办法。可一操作起来,发现电机要不就反应特别慢,根本达不到高速换向的要求,要不就嗡嗡响,感觉哪不对劲儿,好像随时要坏了似的。这时候我就知道,这简单粗暴的方法肯定不行。
后来我就研究伺服电机的控制器,听说这里面有很多门道。我发现有些控制器有专门的换向指令。不过呢,这指令不是那么好用的。我按照说明书设置了参数,结果电机有时候能正常换向,有时候又会有小的抖动。这可把我急坏了,感觉就像在黑暗中摸索,完全找不到准确的方向。
我还试过调整电机的转矩补偿参数。这就好比你在调整一个人的走路姿势,你想让他转弯转得又快又稳。我小心翼翼地一点一点改变参数,就像在调收音机的频率一样。可是这个方法呢,也是时灵时不灵的。
再后来我就琢磨,会不会是电机和负载的连接方式有影响呢。比如说如果连接不牢固,在高速换向的时候可能就会出问题。我就仔细检查了连接部分,把螺丝都拧紧了,把联轴器也重新安装了一遍,确保不会有松动。这一检查不打紧,还真找出点小问题,之前有个螺丝松了。不过这只是解决了一部分问题,电机高速换向还是不是很理想。 有一次偶然的机会,我发现是电机负载惯量比这个参数没有设置好。这个参数就像是一场赛车比赛里赛车的配重一样重要。如果设置得不合适,就像赛车配重失衡,转弯的时候肯定慢而且不稳定。我重新计算并设置了这个参数之后,再加上之前对控制器指令和转矩补偿参数的优化,电机高速换向终于能比较理想地实现了。
我觉得在研究伺服电机高速换向的时候,大家可一定要有耐心。多检查硬件连接,不同的伺服电机和控制器可能会有一些细微的差别,设置参数的时候要一点点试,就像蚂蚁搬家一样,每次变动一点,然后看看效果。不能急躁,一急躁就容易忽略掉很多小细节。还有就是多看看手册,虽然手册有时候写得很复杂难懂,但里面可能藏着解决问题的关键信息呢。
欧姆龙伺服命名规则全文共四篇示例,供读者参考第一篇示例:欧姆龙的伺服系统通常采用字母和数字的组合来进行命名。
这些字母和数字代表了产品的系列、型号和特性等信息,每个字母和数字都有其特定的含义。
下面我们就来详细介绍一下欧姆龙伺服系统的命名规则。
欧姆龙的伺服系统的命名规则通常包括以下几个部分:1. 产品系列:产品系列通常由一个字母表示,代表产品的主要应用领域或特性。
R系列代表通用型伺服系统,G系列代表高性能型伺服系统,E系列代表经济型伺服系统等。
2. 产品型号:产品型号通常由数字和字母组合而成,代表产品的具体型号和规格。
R88M-1代表R系列第88代产品,1代表第一种规格。
3. 产品特性:产品特性通常由字母表示,代表产品的功能或性能特点。
S代表标准型,C代表高精度型,P代表节能型等。
通过以上命名规则,用户可以清晰地了解产品的系列、型号和特性等信息,方便选择适合自己需求的产品。
除了以上基本的命名规则外,欧姆龙的伺服系统还有一些特殊的命名规则,比如:1. 针对特定应用场景的产品:欧姆龙还会针对一些特定的应用场景推出定制化的产品,这些产品通常会在命名中加入特定的标识符号,以示区别。
针对食品包装行业的伺服系统可能会在产品型号后加上“-F”表示。
2. 配套产品的命名规则:欧姆龙的伺服系统通常会配套一些其他的控制器或配件产品,这些产品的命名规则也是非常重要的。
用户在选择配套产品时需要注意保持一致性,以确保系统的正常运行。
欧姆龙的伺服系统命名规则虽然看起来复杂,但只要用户了解其基本原则和特殊标识,就能够轻松地选择和使用合适的产品。
欧姆龙通过科学合理的命名规则,为用户提供了便利,使用户可以更加高效地进行产品选型和应用。
希望本文对您了解欧姆龙伺服系统的命名规则有所帮助。
第二篇示例:欧姆龙伺服产品是欧姆龙公司旗下的一类高精度、高性能的控制设备,广泛应用于机械制造、自动化设备以及工业机器人等领域。
在欧姆龙伺服产品的命名规则中,每个型号和产品参数都有自己独特的含义和规则,下面将详细介绍欧姆龙伺服产品的命名规则。
欧姆龙伺服负载惯量比设定
欧姆龙伺服作为当今市场上的一款优质产品,广泛应用于各种工业自动化领域。
其负载惯量比设定是实现精确控制和高效运行的关键环节。
本文将详细介绍欧姆龙伺服负载惯量比设定方法及其相关注意事项。
一、欧姆龙伺服简介
欧姆龙伺服系统由伺服电机、伺服驱动器和编码器等组成,具有良好的响应速度、高精度和稳定性。
在实际应用中,欧姆龙伺服可根据不同场合和要求进行配置,满足各种控制需求。
二、负载惯量比设定的重要性
负载惯量比是描述伺服系统动态特性的重要参数,它影响到系统的响应速度、超调量以及稳态误差等。
合适的负载惯量比设定可以提高系统的控制性能,降低能耗,延长设备使用寿命。
三、设定步骤与方法
1.测量负载惯量:首先对伺服系统的负载进行测量,包括负载的质量、转动惯量等。
2.计算负载惯量比:根据测量数据,计算出负载惯量与电机惯量之比。
3.调整设定值:根据计算结果,调整欧姆龙伺服驱动器的负载惯量比设定值。
4.测试与优化:在实际运行中观察系统的性能,如响应速度、稳定性等,如有需要可进行多次调整,直至满足性能要求。
四、注意事项
1.测量负载时,要确保负载均匀分布,避免测量误差。
2.计算负载惯量比时,要考虑系统阻尼、摩擦等因素。
3.设定负载惯量比时,不宜过大或过小,以免影响系统性能。
4.在调整过程中,注意观察电机电流、速度等相关参数,以确保系统运行在安全、稳定的状态下。
五、总结
欧姆龙伺服负载惯量比设定是提高伺服系统性能的关键环节。
通过合理设定负载惯量比,可以实现快速、精确的控制效果,降低能耗,提高设备使用寿命。
欧姆龙伺服驱动器参数导出简介欧姆龙伺服驱动器是一种常见的电机控制设备,广泛应用于工业自动化领域。
为了实现对伺服驱动器的精确控制,我们需要了解和导出其参数。
本文将详细介绍欧姆龙伺服驱动器的参数导出方法及相关注意事项。
参数导出方法欧姆龙伺服驱动器的参数可以通过以下几种方式进行导出:1. 使用软件工具欧姆龙提供了专门的软件工具,例如CX-Drive,用于配置和管理伺服驱动器。
通过该软件,可以直接读取和导出伺服驱动器的参数。
具体操作步骤如下: 1. 安装CX-Drive软件并打开。
2. 连接电脑与伺服驱动器,确保通信正常。
3. 在软件中选择相应的连接方式(例如串口、以太网等),建立与伺服驱动器的通信连接。
4. 选择要导出的参数类型(例如位置、速度、加速度等)。
5. 点击“导出”按钮,将参数保存到指定文件夹中。
2. 使用编程语言如果需要批量导出多个伺服驱动器的参数,可以使用编程语言(如Python)来实现自动化导出。
以下是一个简单示例:import omron_cx_drive_api# 连接伺服驱动器drive = omron_cx_drive_api.connect('COM1')# 读取参数parameters = drive.read_parameters()# 导出参数到文件with open('parameters.txt', 'w') as f:for param in parameters:f.write(f'{}: {param.value}\n')以上代码使用omron_cx_drive_api库连接伺服驱动器,并将参数导出到parameters.txt文件中。
3. 手动记录如果只需要导出少量参数或者无法使用软件工具或编程语言,可以手动记录伺服驱动器的参数。
首先,需要了解伺服驱动器的各个参数含义和取值范围。
然后,在伺服驱动器的控制面板或调试界面上查找相应的参数,并手动记录下来。
G伺服切换W伺服经验分享
一、概述
W伺服是早期欧姆龙推广的产品,现随着产品的更新换代,G系列,G5系列伺服作为主推产品投入市场,W伺服开始逐渐缩减供应量,最终会退出市场,但之前很多老的欧姆龙驱动产品用户使用的仍然为W系列伺服,这就存在一个切换的需求。
本文是在帮助一个使用W伺服的客户切换成G伺服过程中一些小经验的总结。
二、替换配置
图表 1 伺服系统切换示意图
三、实施细节
1.客户原使用W伺服详细情况确认
1-1.W伺服系统硬件型号确认
伺服驱动器型号:R88D-WT15H-Z
伺服电机型号:R88M-W1K530H-S2
需要特别注意的是:电机的转速、转矩,以及电压等级。
1-2.W伺服系统外部接线确认
1-3.W伺服驱动器参数设置情况确认Pn000 ~ Pn005
Pn100 ~ Pn125
Pn200 ~ Pn218
Pn300 ~ Pn309
Pn400 ~ Pn40C
Pn500 ~ Pn51E
Pn600,Pn601
1-4.W伺服驱动器、电机安装尺寸的确认驱动器:R88D-WT15H-Z
电机:R88M-W1K530H-S2
1-5.原伺服系统的使用方式
1)PLC以及位置控制模块的控制方式;
2)PLC内部程序的确认;
3)原点返回方式、极限位置、各段运转速度等确认(基本上都可以在程序中找
到);
2.适合G伺服的配置做成
2-1. 伺服电机的选择
1)电压等级;
2)转速;
3)功率、转矩等重要参数;(注:同等转速功率时,W伺服转矩略大于G伺服,
建议选型时,G伺服往大转矩方向选择,以免出现垂直轴运转转矩不足的问题)
4)电机安装尺寸(比较重要的为固定法兰盘安装孔距、电机轴径、键的尺寸);
2-2. 伺服驱动器的选择
1)功率、电压等级必须与选择好的电机匹配;
2)安装尺寸(是否顺利安装到电控箱中)。
2-3. 专用连线的选择
1)动力电缆;
2)编码器电缆;
3)伺服继电器单元(伺服侧)控制电缆;
4)位置控制单元电缆;
5)伺服继电器单元;
2-4. 再生电阻确认
3. 现场安装接线。
4. 上电调试
1) 不接负载,不接控制模块,使用驱动器面板或CX-DRIVER 点动运行,确
认接线等是否正确(使用默认转速:500r/min);
2) 接负载,不接控制模块进行运转(自学习等步骤,详解附件)
G伺服调整.doc
3) W 伺服参数与G 伺服参数匹配的调整
本项目中原设定的W 伺服参数基本按照默认形式,无需做较大改动,主要是电子
齿轮比的重新更改,因客户不允许更改原PLC 中的位置数据,所以必须从W 伺服设定的参数中换算出G 伺服的参数,保证使用G 伺服后设备运转的各个位置不变。
本项目:
Pn202=32768(分子G1)
Pn203=360(分母G2)
W 伺服电机编码器的分辨率为:32768
3603276821=G G =f
432768⨯,f 为每转脉冲数。
1440=f
G 伺服电机编码器分辨率为:2500
144
100042500448=⨯=f B Pn Pn
4) 接负载,接控制模块运行,反复运行,观察运行状态,针对运行中的不稳定现象单
独调整个别增益参数。
以上为本项目中G 切换W 伺服的一点心得,希望能给各位在类似情况中有点帮助。
注:G 伺服参数的调整可以用面板也可以用软件来进行,但如果驱动器参数发生错误,伺服不运转,初始化参数必须使用G 伺服专用电缆R88A-CCG002P2,CX-DRIVER 来进行参数初始化,面板不支持初始化功能(G5伺服支持面板参数初始化)。