07导航雷达第七章雷达目标跟踪与AIS
- 格式:ppt
- 大小:706.00 KB
- 文档页数:63
《雷达操作与应用》课程标准课程代码:13013101课程类型:理实一体课课程性质:(必修课、限选课、任选课)适用专业:航海技术总学时:20一、课程性质与作用《雷达操作与应用》课程是航海类专业的专项训练课程,是根据STCW 公约马尼拉修正案《中华人民共和国海船船员适任评估规范》关于“雷达操作与应用”而设立的。
本课程的主要任务是培养学生掌握雷达操作方面的基本知识、雷达在船舶航行与避碰中的应用,使学生能够正确的使用雷达,判断局面从而实现避碰,使学生达到STCW公约马尼拉修正案和中华人民共和国海事局所规定的要求,能够满足船舶保安工作的需要。
二、课程目标通过本课程的学习,使学生或学员达到能通过海事局组织的培训合格证考试,取得适任评估证书。
(一)知识目标掌握雷达操作与应用的相关知识和技能;(二)能力目标1、能够正确使用雷达;2、能够雷达基本操作和设置、雷达定位、雷达导航、雷达人工标绘、雷达自动标绘、AIS报告目标及试操项目的学习,有助于船舶航行的安全。
(三)素质目标1、培养学生的动手操作能力;2、培养学生具备分析、判断和应变的能力;3、培养学生的自主学习和沟通能力。
三、课程设计理念与思路根据STCW公约马尼拉修正案及中华人民共和国海事局海船船员适任考试评估的有关要求,进行雷达基本操作和设置、雷达定位、雷达导航、雷达人工标绘、雷达自动标绘、AIS报告目标及试操项目的学习,通过评估,使学生或学员掌握雷达操作与应用的相关知识和技能并能正确进行操作和应用的能力。
四、教学进程安排学习项目学习任务课时1 雷达基本操作和设置任务一保持清晰观测目标的雷达操作方法1 任务二准确测量目标位置的操作方法2 雷达定位任务一雷达目标识别与定位目标的选择3 任务二雷达定位方法的选择任务三雷达定位目标测量方法与保证雷达定位的操作3 雷达导航任务一雷达平行线导航操作1 任务二雷达距离避险线导航操作任务三雷达方位避险线导航操作4 雷达人工标绘任务一转向避让措施6 任务二变速避让措施5 雷达自动标绘任务一目标捕获6 任务二目标跟踪6 AIS报告目标任务一AIS目标信息1 任务二雷达跟踪目标与AIS报告目标关联试操船任务一启动试操船的准备2 任务二试操船操作任务三获得有效的避碰方案任务四利用试操船确定恢复原航向和/或航速的时机总计20五、教学内容与要求项目名称雷达基本操作和设置课时 1教学目标知识目标掌握雷达各控钮的作用及操作要领能力目标应用所学知识,能学以致用素质目标掌握各种型号雷达的正确使用学习任务任务一保持清晰观测目标的雷达操作方法任务二准确测量目标位置的操作方法相关知识雷达的基本组成及各部分功能教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称雷达定位课时3教学目标知识目标掌握雷达定位的原理、定位误差等能力目标应用所学知识,能学以致用素质目标掌握不同的雷达定位方法学习任务任务一雷达目标识别与定位目标的选择任务二雷达定位方法的选择任务三雷达定位目标测量方法与保证雷达定位的操作相关知识距离方位定位基础知识教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称雷达导航课时 1教学目标知识目标掌握导航线的应用能力目标应用所学知识,能学以致用素质目标掌握各种型号雷达导航的正确使用学习任务任务一雷达平行线导航操作任务二雷达距离避险线导航操作任务三雷达方位避险线导航操作相关知识方位、距离避险线的使用教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称雷达人工标绘课时 6教学目标知识目标通过人工标绘获取他船基本信息,从而判断会遇态势能力目标应用所学知识,能学以致用素质目标掌握各种会遇态势下人工标绘的方法学习任务任务一转向避让措施任务二变速避让措施相关知识矢量三角形的原理及应用教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称雷达自动标绘课时 6教学目标知识目标能正确标绘物标并掌握各参数含义能力目标应用所学知识,能学以致用素质目标掌握各种型号雷达自动标绘的正确使用学习任务任务一目标捕获任务二目标跟踪相关知识ARPA自动标绘相关知识教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称AIS报告目标课时1教学目标知识目标AIS基本信息的输入、获取等能力目标应用所学知识,能学以致用素质目标掌握各种型号AIS的正确使用学习任务任务一AIS目标信息任务二雷达跟踪目标与AIS报告目标关联相关知识AIS工作原理教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问项目名称试操船课时2教学目标知识目标试操船功能设置及避让措施能力目标应用所学知识,能学以致用素质目标掌握各种型号试操船的正确使用学习任务任务一启动试操船的准备任务二试操船操作任务三获得有效的避碰方案任务四利用试操船确定恢复原航向和/或航速的时机相关知识转向和(或)避让示意图教学设备、工具与媒体雷达与ARPA实验室考核评价作业、提问六、考核评价本课程的考核与海事局的考核直接接轨,实操考核满分100分,60分合格。
导航雷达与AIS在军用舰船中的综合运用作者:柳林李明奇来源:《现代电子技术》2013年第17期摘要:导航雷达和AIS作为两种主要导航设备在现代船舶上有着广泛应用,对船舶的安全航行有着重要意义。
通过分析其各自优缺点,论述了在军用舰船中综合使用导航雷达和AIS 的必要性,提出了综合运用导航雷达和AIS保障舰艇安全航行及遂行各项任务的注意事项和基本方法。
关键词: AIS;导航雷达;军用舰船;综合使用中图分类号: TN967.7⁃34 文献标识码: A 文章编号: 1004⁃373X(2013)17⁃0012⁃030 引言军用舰船是赋有特殊任务的船只,安全航行是其遂行作战训练任务的基础。
从以往各国的报道中可以看到,军舰触礁搁浅,军舰之间、军舰与民用船只之间相碰的事故不在少数,由于军舰一般设备先进,造价昂贵,且武器装备较多,危险性较大,一旦发生事故往往造成重大人员伤亡和财产损失,军舰作为一国武力象征,有时甚至会引起外交争端。
因此,军舰的安全航行一直是各国十分重视的问题。
导航雷达作为军用舰船的必要导航装备,在舰船安全航行方面发挥着重大作用。
AIS作为一种新型导航系统,具有其他导航设备不可比拟的优势,在军用舰船上加装AIS,综合运用AIS和导航雷达形成优势互补是保证舰船海上安全航行的重要途径。
1 导航雷达基本特点1.1 导航雷达优势传统的舰船导航主要靠目力观察,受气象条件及人为因素等方面限制,不易及时发现和跟踪目标,而有了导航雷达就大不相同,相对来说导航雷达受气象条件影响较小,精度高,反应快速,探测距离远,导航雷达的探测距离一般可以达到10~20海里。
随着电子计算机技术在航海上的推广和应用,导航雷达自动化程度也越来越高,功能更加完善,特别是导航雷达自动标绘仪的出现,大大提升了导航雷达操纵的简捷性,增加了避碰预警时间。
导航雷达用于近岸航行,特别是用于雾中航行和狭水道航行时,有较大优越性[1] 。
1.2 导航雷达局限性尽管导航雷达在应用中有上述优势,但其局限性也不容忽视。
船用导航雷达和AIS综合应用的优势与局限性摘要:船用导航雷达和船舶自动识别系统(AIS)是两部重要的助航仪器,本文分析了导航雷达和AIS在单独使用时各自的功能和特点,并指出二者在综合应用中所表现出的优势和局限性以及针对其局限性的注意事项。
关键词:导航雷达、AIS、综合应用目前,全球经济趋于一体化,航运业迅猛发展,船舶数量急剧增加,于此同时海难、海损事故也随之增加,给广大海员的生命安全、国家财产和海洋环境造成严重威胁。
为加强航行安全,保护海洋环境,船舶间、船岸间信息的充分、快速、准确交换就显得尤为重要和突出。
一、船用导航雷达的功能和特点1.雷达在应用中的优势伴随船舶数量的激增,船舶碰撞事故的事故率也居高不下,因此,如何实现船舶间的协调行动,避免船舶碰撞就显得异常重要。
雷达作为船舶避碰的主要助航仪器,从出现至今一直发挥着重要的作用。
雷达是自主式导航设备,可以扫描到海面上的具有一定大小的物标并将其回波显示在雷达显示器上,从而将海面上物表和本船的相对位置关系清晰显示,让操作者获得较为全面的交通形式图像。
通过对物标船的标绘,可以判断物标船和本船是否存在碰撞危险,更可以求取避让措施,核实避让行动的效果。
传统的船舶避碰是用眼睛实际观察周围船舶的运动态势,进而凭借经验采取改向或变速措施来实现船舶间的安全避让。
不难发现,传统的避让方法受受能见度的影响较大,比如海上大雾天气,航海员仅凭肉眼能观测到的距离大大减小,有时会减小到几十米,就不能实现安全航行的目标。
而有了雷达就大不相同,雷达受能见度影响小,精度高(30米左右),决策时间短(通过雷达自动标绘仪—ARPA跟踪物标并求取避让措施仅需3-5分钟时间),雷达的探测距离可以达到10—20海里,驾驶员的工作负担大大减轻。
另一方面,当船舶发生碰撞事故时,在避让行动中得雷达观测信息可以作为海事调查的证据,给海事处理也带来了很大方便。
2.雷达在应用中的局限性尽管雷达在应用中有上述的优势,但其局限性也不容忽视。
VTS中雷达与AIS基本功能的比较初立辉[摘要]由于雷达是工作于微波波段的目标探测定位设备,而AIS是工作于超短波波段的数据通信设备,两者的工作机理和功能存在差异。
在VTS的应用中,它们各有特点并存在不足,不能以一个取代另一个。
了解并在VTS中充分发挥该两技术手段的特点,相互弥补其存在的不足,对正确、有效使用该两技术手段,进一步扩展VTS功能,更好发挥它对船舶的服务管理功能有着重要意义。
[ Abstract ] Since the radar is operating in the microwave band target detection pointing device and the AIS is operating in the VHF -band data communication device , there is a difference between the two working mechanism and function . In the VTS applications, they have their own characteristics and shortcomings , can not be replaced by another one . Understand and give full play to the characteristics of the VTS of the two techniques , the presence of each other to make up for its lack of proper and effective use of the two techniques, the further expansion of VTS functions , better play its service management capabilities of the ship is of great significance .1雷达与AIS的异同点1.1 雷达与AIS的工作原理雷达是利用电磁波的二次辐射、转发或固有辐射来探测目标,获取目标空间坐标、速度、特征等信息的一种无线电装置。
雷达与ais目标位置信息融合方法的研究雷达与 AIS 目标位置信息融合方法的研究随着航运行业的不断发展壮大,自动化系统的应用越来越广泛。
而在自动化系统中,雷达和 AIS 是两个重要的传感器。
雷达可以探测到周围的目标,而 AIS 能够提供目标的位置、速度和方向等信息。
那么,如何将这两种传感器的信息进行融合,提高船舶的安全性和工作效率,成为了当前的一个研究热点。
一、雷达与 AIS 目标信息融合意义1.提高目标追踪准确性由于雷达和 AIS 的工作原理不同,其探测到的目标位置信息可能存在一定的偏差和误差。
而通过各种融合方法,可以有效地减小误差,提高目标追踪的准确性。
2.提高自动化控制效率通过雷达和 AIS 的融合,可以得到更完整、更准确的目标信息,从而实现自动化船舶控制,提高工作效率。
3.提高船舶安全性雷达和 AIS 的融合可以帮助船舶及时掌握周围环境的情况,防止可能的碰撞和其他危险事故的发生,提高船舶的安全性。
二、雷达与 AIS 目标位置信息融合方法目前,已经有许多学者针对雷达和 AIS 的融合方法进行了研究,主要包括如下几种方法:1.基于 Kalman 滤波的融合Kalman 滤波是一种经典的目标状态估计算法,可以有效地估计目标的状态量。
通过将雷达和 AIS 的数据输入到 Kalman 滤波器中,可以得到更准确、更稳定的目标状态信息。
2.基于粒子滤波的融合粒子滤波在目标状态估计中具有很好的效果,特别是对于非线性系统估计情况下的目标状态滤波更具有优势。
通过将雷达和 AIS 的数据,输入到粒子滤波器中,可以得到更高精度的目标状态信息。
3.基于神经网络的融合神经网络可以根据过去经验,预测未来情况。
通过将雷达和 AIS 的数据作为输入,训练得到适合船舶运动的神经网络模型,可以实现目标位置信息的更加准确的融合。
三、结语雷达和 AIS 的融合是一个复杂的问题,需要针对不同情况选择合适的融合方法。
通过不断的研究和创新,可以进一步提高融合精度,提高船舶的安全性和工作效率。
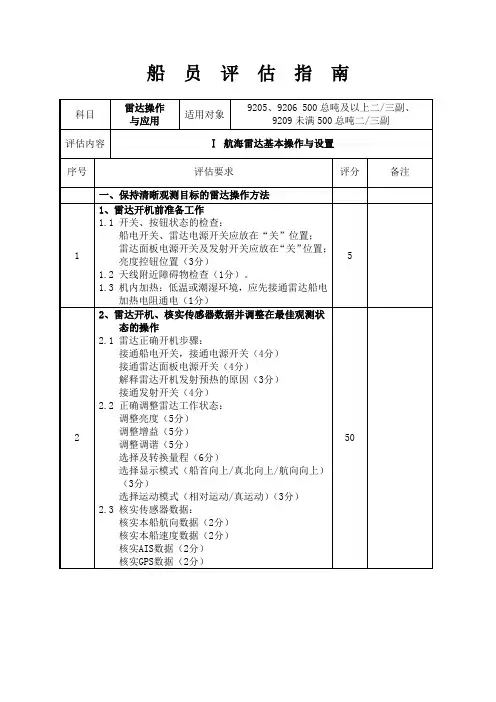
船员评估指南
注:1、该评估内容在真实雷达上操作,部分内容可采用口述方式进行;
2、该评估内容为必考,满分100分,得分60分及以上为及格,但成绩不计
入总分;
3、该评估内容须在5分钟内完成;
4、该评估内容为“雷达操作与应用”项目的基本内容,未及格者不得进行
该项目的后续其它内容的评估。
船员评估指南
注:
1 评分标准
①操作正确、熟练,回答问题完整准确:100%;
②操作正确、比较熟练,回答问题基本准确:80%;
③操作正确、熟练程度一般,回答问题尚准确:60%;
④操作较差,回答问题错误较多:40%;
⑤操作差,回答问题基本不正确:20%;
⑥无法完成操作,不能回答出问题:0。
2 本部分评估考试内容共4项,满分100分,60分及以上及格。

雷达操作与应用目录雷达操作与应用评估规第一章雷达基本操作与设置第二章雷达观测、定位第三章雷达导航第四章雷达人工标绘第五章雷达自动标绘第六章AIS报告目标第七章试操船雷达操作与应用评估规(适用对象:9205、9206 500总吨及以上二/三副、9209未满500总吨二/三副)1.评估目的通过评估,在真实的雷达设备和/或雷达模拟器上,检验被评估者雷达观测、雷达导航和雷达避碰的设备操作和应用能力。
本评估满足STCW公约马尼拉修正案及中华人民国海事局海船船员适任考试评估的相关要求。
2.评估容2.1 雷达基本操作与设置2.2 雷达观测2.3 雷达导航2.4 雷达人工标绘2.5 雷达自动标绘2.6 AIS报告目标2.7 试操船3.评估要素及标准(1)评估要素3.1 雷达基本操作与设置3.1.1 保持清晰观测目标的雷达操作方法①雷达开机前准备工作②雷达开机、核实传感器数据、并调整在最佳观测状态的操作③根据气象海况和航行环境保持清晰观测目标的操作④雷达关机操作3.1.2 准确测量目标位置的操作方法①准确测量目标距离的操作②准确测量目标方位的操作3.2 雷达定位①在评估要素3.1的基础上,雷达目标识别与定位目标的选择②雷达定位方法的选择③雷达定位目标测量方法与保证雷达定位精度的操作3.3 雷达导航①雷达平行线导航操作②雷达距离避险线导航操作③雷达方位避险线导航操作3.4 雷达人工标绘3.4.1转向避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定转向避让措施⑤根据转向不变线判断本船转向后来船的相对运动线的变化方向⑥通过标绘求出具体转向角并核查是否会导致另一紧迫局面⑦操纵船舶进行转向避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航向的时机并采取措施⑩分析产生误差的原因3.4.2变速避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定变速避让措施⑤判断本船变速后来船的相对运动线的变化方向⑥通过标绘求出变速幅度并核查是否会导致另一紧迫局面⑦操纵船舶进行变速避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航速的时机并采取措施⑩分析产生误差的原因3.4.3停船避让措施①观测并标绘目标船的相对运动线②求取目标船的航向、航速、CPA及TCPA③判断本船所处的局面④根据规则的规定拟定避让措施⑤判断本船停船后来船的相对运动线的变化方向⑥通过标绘求出停船时机(应考虑冲程的影响)并核查是否会导致另一紧迫局面⑦操纵船舶进行停船避让⑧核查转向避让效果并判断他船行动⑨求取恢复原航速的时机并采取措施⑩分析产生误差的原因3.5 雷达自动标绘3.5.1 目标捕获①CPA/TCPA设置准则②目标捕获的含义,建立初始跟踪的过程,目标运动趋势数据的获取③目标手动捕获和自动捕获在不同航行环境中使用的基本原则及其优势与局限性④自动捕获设置方法及抑制区的合理使用3.5.2 目标跟踪①目标稳定跟踪条件判断,目标预测运动数据的获取及其精度判断②在可能发生目标丢失和目标交换条件下的雷达观测与操作③判断目标危险的方法及其操作④本船机动和目标机动对雷达数据的影响3.6 AIS报告目标3.6.1 AIS目标信息①识别AIS休眠目标、激活目标、被选目标、危险目标、丢失目标和轮廓目标②获取AIS目标信息3.6.2 雷达跟踪目标与AIS报告目标融合①AIS辅助雷达避碰的操作②雷达跟踪目标与AIS报告目标融合条件的选择3.7 试操船①启动试操船的准备②雷达跟踪目标与AIS报告目标试操船方法及其操作③判断试操船结果的可行性④利用试操船确定恢复原航向和/或航速的时机(2)评估标准:①操作正确、熟练,回答问题完整准确:100%;②操作正确、比较熟练,回答问题基本准确:80%;③操作正确、熟练程度一般,回答问题尚准确:60%;④操作较差,回答问题错误较多:40%;⑤操作差,回答问题基本不正确:20%;⑥无法完成操作,不能回答出问题:0。
浅谈AIS与雷达目标信息融合摘要给出AIS和雷达目标信息融合问题的提出背景及模型的建立后,介绍主要用的信息融合方法即粗糙集与神经网络,简单概述粗糙集和人工神经网络,然后对粗糙集与人工神经网络相结合的可行性进行归纳总结,得出将粗糙集和神经网络结合起来的融合方法是可行的。
关键词AIS;雷达;信息融合;粗糙集;神经网络传统的雷达曾是海上监控系统的一个里程碑。
但由于传统雷达的局限性,决定了它所能提供的是非常小量的信息。
而船舶自动识别系统(AIS)能提供的信息有很多的优点,足以弥补雷达数据的缺陷。
但就现阶段来说,雷达在航海技术中又是无可替代的。
因此,为给船舶航行提供更精确可靠的信息,我们需要将AIS与雷达结合起来,把他们的数据进行综合处理,取长补短,为船舶的安全航行和港口对船舶更好的管理提供质量更高的数据。
AIS与雷达系统对目标的监测跟踪相比,AIS具有下列优点:1)信息量大,可提供雷达所不能提供的大量船舶动态信息,节省自动避碰系统的计算时间和存储容量。
2)信息来源可靠,误差小。
3)不间断地提供动态信息。
4)自主运行,无需人工监控。
虽然AIS具有上述优点,但仍有它的局限性,因而它并不能取代雷达系统,这是由于:1)不是所有船舶都安装了AIS,所以雷达系统还是不可或缺的。
2)雷达系统是自主的监测跟踪手段。
在VTS中心,无论船舶上是否装备AIS或雷达,或它们是否正常工作,雷达系统对目标的监测跟踪均不受影响;对一些突发性交通事故的监测、记录,雷达系统更能发挥作用。
3)雷达系统可以得到水域的全景交通图像,除了所有的运动目标,还有静止和固定的目标,如助航设施等。
4)AIS提供的位置数据来自于GPS/DGPS数据,而GPS/DGPS数据是GPS/DGPS 天线所在点的船舶运动数据,恢复成图像时该船只是一个点,而雷达目标回波在一定程度上可反映目标的大小和形状。
5)虽然目前AIS设备中的船位信息来源于GPS/DGPS设备,精度较高。
基于AIS的对海雷达多目标融合跟踪方法贺丰收;缪礼锋;陶飞翔;张存【摘要】针对海面密集目标跟踪时数据关联难度大且跟踪精度不高的问题,提出了一种基于船载自动识别系统(AIS)信息的雷达航迹融合方法.首先,根据AIS测量值和雷达的测量噪声等级确定融合系数,保证融合数据的合理性;然后,使用融合后的航迹对雷达测量值作双波门的数据关联处理,优化数据关联方法,提高源于目标测量值的置信度,降低虚警和杂波的影响,进一步提高航迹的稳健性和跟踪精度;最后通过仿真和实测数据证明了所提方法的有效性和优越性.%For the great difficulty of data association and low tracking accuracy in the intensive target tracking of sea surface,a track fusion method based on automatic identification system (AIS) information is proposed in this paper.Firstly,the fusion coefficients are calculated according to the measured value of AIS and the measurement noise level of radar,which can ensure rationality of fusion data.Then the data association of double gates is made by use of the fusion track for the measured value of radar,which can optimize the data association method,improve the confidence level of target measurement value,and reduce the influences of false alarm and clutter.Thus,the track robustness and the tracking accuracy are improved.Finally,the validity and superiority of the method is proved by simulation data and actual measurement data.【期刊名称】《雷达科学与技术》【年(卷),期】2017(015)002【总页数】6页(P153-158)【关键词】海面密集目标跟踪;航迹融合;AIS信息;数据关联【作者】贺丰收;缪礼锋;陶飞翔;张存【作者单位】中航工业雷华电子技术研究所,江苏无锡214063;中航工业雷华电子技术研究所,江苏无锡214063;中航工业雷华电子技术研究所,江苏无锡214063;中航工业雷华电子技术研究所,江苏无锡214063【正文语种】中文【中图分类】TN953;TN957在含杂波或多目标背景条件下,数据关联是对目标进行稳定及正确跟踪的关键技术[1-3]。