步进电机PLC控制 (课堂用).ppt
- 格式:ppt
- 大小:1.49 MB
- 文档页数:36
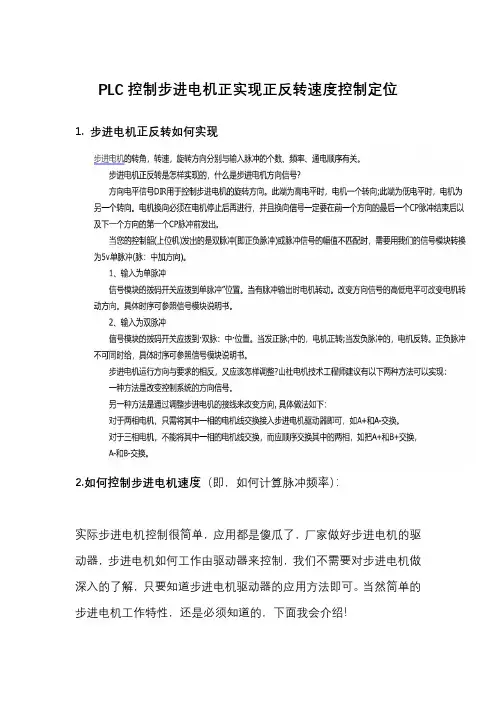
PLC控制步进电机正实现正反转速度控制定位 1.步进电机正反转如何实现2.如何控制步进电机速度(即,如何计算脉冲频率):实际步进电机控制很简单,应用都是傻瓜了,厂家做好步进电机的驱动器,步进电机如何工作由驱动器来控制,我们不需要对步进电机做深入的了解,只要知道步进电机驱动器的应用方法即可。
当然简单的步进电机工作特性,还是必须知道的,下面我会介绍!细分的作用:两相步进电机,基本步距角1.8度,即:200个脉冲电机转一圈,称之为整步。
可以在步进电机的驱动器上设定细分数,其作用是:设置为2细分(也称为半步)时,则步距角为0.9度,400个脉冲转一圈。
设置为4细分时,则步距角为0.45度,800个脉冲转一圈。
设置为8细分时,则步距角为0.225度,1600个脉冲转一圈。
细分数越高,上位机发一个脉冲走的长度越小,精度越高!这个很好理解,一个脉冲走10毫米,10%误差时,一个脉冲误差1毫米,一个脉冲走1毫米,同样是10%误差时,一个脉冲误差0.1毫米。
当然,我们不可能把细分数设的很大,达到每个脉冲行走的长度特别小的目的。
您记住两相步进电机200个脉冲转一圈就行了!细分越大,步进电机转一圈的脉冲数越大!如果想让步进机以每分钟600转的速度,行走400毫米,我们如何计算上位机需要发出的脉冲数及脉冲频率?如何控制步进电机速度(即,如何计算脉冲频率):假定设置为四细分数,电机转一圈所需要的脉冲数即为800个,要实现步进电机600转/分的转速,上位机应该发送的脉冲频率计算方法:频率的概念是一秒钟的时间发送的脉冲个数所以,先计算步进电机每秒钟的转数600/60=10转/秒再计算10转/秒需要的脉冲数10 X 800 = 8000个即脉冲频率为 8000 ,也就是8K结论,为了实现步进电机600转/分的转速,上位机应该保持8K的脉冲输出频率现在您明白了吧?为了计算脉冲频率必须知道的两个前提条件是:1、知道步进电机转一圈需要的脉冲数;2、知道步进电机的转速,转速单位是:转/如何计算步进电机所需要的脉冲数:假定设置为四细分数,电机转一圈所需要的脉冲数即为800个,要实现步进电机行走400毫米的距离,上位机应该发送的脉冲个数计算方法:如果步进电机输出轴与丝杠(螺距:10mm )直连,或是通过皮带轮传动,轮周长10mm. 即,步进电机转一圈,机械的行走长度为10mm。

PLC如何控制步进电机PLC(可编程逻辑控制器)是一种广泛应用于工业自动化领域的控制设备,通过输入/输出模块对各种机电设备进行控制。
在PLC系统中,步进电机是常见的执行元件之一,它具有准确的位置控制和高的加减速性能。
本文将介绍PLC如何控制步进电机,包括步进电机的驱动方式、PLC的控制原理及步进电机控制的程序设计。
一、步进电机的驱动方式1.串行通信驱动方式:步进电机通过串行通信驱动方式与PLC进行通信和控制。
首先,将PLC与串行通信模块相连,通过串行通信模块与步进电机控制器进行通信。
PLC通过串行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
2.并行通信驱动方式:步进电机通过并行通信驱动方式与PLC进行通信和控制。
与串行通信驱动方式类似,首先将PLC与并行通信模块相连,通过并行通信模块与步进电机控制器进行通信。
PLC通过并行通信模块发送指令,步进电机控制器接收指令后控制步进电机运动。
3.脉冲驱动方式:步进电机通过脉冲驱动方式与PLC进行通信和控制。
在脉冲驱动方式中,需要PLC输出脉冲信号控制步进电机。
通常情况下,PLC将脉冲信号传递给步进电机驱动器,在驱动器中产生相应的控制信号,实现对步进电机的控制。
二、PLC的控制原理PLC作为控制器,一般采用扫描运行方式。
其运行原理如下:1.输入信号读取:PLC将外部输入信号输入到输入模块中,采集输入信号,并将其从输入模块传递给中央处理器(CPU)进行处理。
2. 程序执行:CPU根据事先编写好的程序进行处理,包括数据处理、逻辑运算和控制计算等。
PLC程序一般采用ladder diagram(梯形图)进行编写。
3.输出信号控制:根据程序的执行结果,CPU将处理好的数据通过输出模块发送给外部设备,用于控制和操作外部设备。
三、步进电机控制的程序设计步进电机的控制程序主要包括参数设定、模式选择、起停控制、运动控制等部分。
下面以一个简单的例子来说明步进电机控制的程序设计过程:1.参数设定:首先需要设定步进电机的一些参数,如电机型号、步距角度、运动速度等。


摘要对可编程序控制器的步进电机控制系统进行设计,阐明了可编程序控制器及步进电机的结构和工作原理,同时给出了可编程序控制器控制步进电机电气控制系统的硬件组成和软件设计,包括可编程序控制器输入输出接线图、梯形图、程序设计和步进电机的驱动电路。
提出基于PLC的四相八拍步进电机控制的方案,介绍了控制系统的设计方案及其软硬件的实现方法,实现对四相步进电机的启动,停止控制、正反转控制。
方法简单易行,编程容易,可靠性高。
关键字:步进电动机 PLC 梯形图驱动电路目录1 引言 (4)2课题分析 (4)2.1 任务分析 (4)2.2 方案设计 (4)3 反应式步进电机 (6)3.1 步进电机的结构 (6)3.2 步进电机的工作原理 (7)4 可编程器件FX2N-32MR (8)4.1 FX2N-32MR的结构 (8)4.2 FX2N-32MR的工作原理 (8)5 硬件设计 (8)5.1 I/O端口 (8)5.2 I/O端子连接线 (9)5.3 驱动电路 (10)6 软件设计 (11)6.1 PLC控制步进电机控制方法 (11)6.2 梯形图 (12)7 调试 (14)7.1 硬件调试 (14)7.2 软件调试 (15)7.3 运行调试 (15)8 结论 (15)9 心得体会 (15)参考文献 (16)1.引言随着微处理器、计算机和数字通信技术的发展,计算机控制已经广泛地应用在所有的工业领域。
现代社会要求制造业对市场做出迅速的反应,生产设备和自动生产线的控制系统必须具有较高的可靠性和灵活性,可编程器件正是顺应这个要求,PLC已广泛应用各种机械设备和生产过程的自动化控制系统中。
步进电机是一种控制精度极高的电机。
在PLC步进电动机的控制系统中,输入到步进电动机绕组中的脉冲数或频率可以控制步进电动机的角位移和转速,在给步进电动机的各绕组输入脉冲时需要应用脉冲分配器分配脉冲。
2.课题分析2.1 任务分析步进电动机是一种将电脉冲信号转换成直线位移或角位移的执行元件。