Linux驱动的架构 - 宋宝华
- 格式:ppt
- 大小:1.53 MB
- 文档页数:15
作为一个新人,怎样学习嵌入式Linux?(韦东山)被问过太多次,特写这篇文章来回答一下。
在学习嵌入式Linux之前,肯定要有C语言基础。
汇编基础有没有无所谓(就那么几条汇编指令,用到了一看就会)。
C语言要学到什么程度呢?越熟当然越好,不熟的话也要具备基本技能。
比如写一个数组排序、输入数字求和什么的。
学C语言唯一的方法是多写程序多练习,编译出错没关系,自己去解决;执行出错没关系,自己去分析。
以前我是用VC来练习C语言的,经常去尝试着写一些C语言竞赛的题目。
它们是纯C、纯数学、纯逻辑的题目,不涉及界面这些东西,很适合煅炼你的编程能力。
回到主题,首先我们要明白你的目的是什么,大概来说所谓嵌入式Linux 可以分为两部分:底层系统、应用开发。
如果你是想做应用开发,那么你去把C 语言、数据结构、JAVA什么的学好吧。
嵌入式应用开发和PC上的应用开发并没有什么特别要注意的。
也许你说在嵌入式上要做些优化,是的,要优化,但是未经优化的程序和PC上的程序开发没什么差别。
另外,当你有能力去优化时,你已经不用来问这个问题了。
具体到某个例子,比如说开发界面,在PC上我们用VC;在嵌入式Linux里也许我们用QT也许用Android,这个时候你应该去学学QT、Android的编程。
但是基础还是C或JAVA,在此基础上去熟悉它们的接口。
你学过VC的话,也是要花时间去了解那些类、控件的。
如果你的目的是想学习底层系统,这是我的专长,倒是可以说一点。
在回答这个问题之前,我先回答:不少人问我,到底是学驱动还是学应用?我只能说凭兴趣,并且驱动和应用并不是截然分开的1. 我们说的驱动,其实并不局限于硬件的操作,还有操作系统的原理、进程的休眠唤醒调度等概念。
想写出一个好的应用,想比较好的解决应用碰到的问题,这些知识你应该懂2. 做应用门槛低,特别是现在的ANDROID,纯JAVA。
做应用的发展路径个人认为就是业务纯熟。
比如在通信行业、IPTV行业、手机行业,你了解行业的需求。
Linux设备驱动程序原理及框架-内核模块入门篇内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块内核模块介绍Linux采用的是整体式的内核结构,这种结构采用的是整体式的内核结构,采用的是整体式的内核结构的内核一般不能动态的增加新的功能。
为此,的内核一般不能动态的增加新的功能。
为此,Linux提供了一种全新的机制,叫(可安装) 提供了一种全新的机制,可安装) 提供了一种全新的机制模块” )。
利用这个机制“模块”(module)。
利用这个机制,可以)。
利用这个机制,根据需要,根据需要,在不必对内核重新编译链接的条件将可安装模块动态的插入运行中的内核,下,将可安装模块动态的插入运行中的内核,成为内核的一个有机组成部分;成为内核的一个有机组成部分;或者从内核移走已经安装的模块。
正是这种机制,走已经安装的模块。
正是这种机制,使得内核的内存映像保持最小,的内存映像保持最小,但却具有很大的灵活性和可扩充性。
和可扩充性。
内核模块内核模块介绍可安装模块是可以在系统运行时动态地安装和卸载的内核软件。
严格来说,卸载的内核软件。
严格来说,这种软件的作用并不限于设备驱动,并不限于设备驱动,例如有些文件系统就是以可安装模块的形式实现的。
但是,另一方面,可安装模块的形式实现的。
但是,另一方面,它主要用来实现设备驱动程序或者与设备驱动密切相关的部分(如文件系统等)。
密切相关的部分(如文件系统等)。
课程内容内核模块介绍应用层加载模块操作过程内核如何支持可安装模块内核提供的接口及作用模块实例内核模块应用层加载模块操作过程内核引导的过程中,会识别出所有已经安装的硬件设备,内核引导的过程中,会识别出所有已经安装的硬件设备,并且创建好该系统中的硬件设备的列表树:文件系统。
且创建好该系统中的硬件设备的列表树:/sys 文件系统。
(udev 服务就是通过读取该文件系统内容来创建必要的设备文件的。
)。
linux设备驱动--总线,驱动,设备/wh_19910525/article/details/739805120122.6 版本内核是如何管理总线,驱动,设备之间的关系的,关于bus_type、device_driver、device这三个内核结构在内核代码中可以找到。
由于这三个结构的重要性,我们在这里先将它们贴出来;1、设备结构的定义:struct device {struct klist klist_children;struct klist_node knode_parent; /* node in sibling list */ struct klist_node knode_driver;struct klist_node knode_bus;struct device *parent;struct kobject kobj; //kobject结构,关于这个结构与kset 结构以及subsystem结构,笔记中会有描述。
char bus_id[BUS_ID_SIZE]; /* position on parent bus */struct device_type *type;unsigned is_registered:1;unsigned uevent_suppress:1;struct semaphore sem; /* semaphore to synchronize calls to* its driver.*/struct bus_type * bus; /* type of bus device is on */ //这个设备挂接的总线的类型struct device_driver *driver; /* which driver has allocated this device */ //这个设备挂接的驱动void *driver_data; /* data private to the driver */void *platform_data; /* Platform specific data, device core doesn't touch it */struct dev_pm_info power;#ifdef CONFIG_NUMAint numa_node; /* NUMA node this device is close to */#endifu64 *dma_mask; /* dma mask (if dma'able device) */u64 coherent_dma_mask;/* Like dma_mask, but foralloc_coherent mappings asnot all hardware supports64 bit addresses for consistentallocations such descriptors. */struct list_head dma_pools; /* dma pools (if dma'ble) */ struct dma_coherent_mem *dma_mem; /* internal for coherent mem override *//* arch specific additions */struct dev_archdata archdata;spinlock_t devres_lock;struct list_head devres_head;/* class_device migration path */struct list_head node;struct class *class;dev_t devt; /* dev_t, creates the sysfs "dev" */struct attribute_group **groups; /* optional groups */ void (*release)(struct device * dev);};2、设备驱动的结构:struct device_driver {const char * name; //设备驱动的名字struct bus_type * bus; //设备驱动挂接的总线的类型struct kobject kobj; //kobject结构struct klist klist_devices; //这个驱动对应的设备的链表struct klist_node knode_bus;struct module * owner;const char * mod_name; /* used for built-in modules */struct module_kobject * mkobj;int (*probe) (struct device * dev);int (*remove) (struct device * dev);void (*shutdown) (struct device * dev);int (*suspend) (struct device * dev, pm_message_t state);int (*resume) (struct device * dev);};3、总线结构:struct bus_type {const char * name; //总线的名字struct module * owner;struct kset subsys; //与该总线相关的subsystemstruct kset drivers; //挂接在该总线上的驱动的集合struct kset devices; //挂接在该总线上的设备的集合struct klist klist_devices;struct klist klist_drivers;struct blocking_notifier_head bus_notifier;struct bus_attribute * bus_attrs; //总线属性struct device_attribute * dev_attrs; //设备属性struct driver_attribute * drv_attrs; //驱动属性int (*match)(struct device * dev, struct device_driver * drv);int (*uevent)(struct device *dev, struct kobj_uevent_env*env);int (*probe)(struct device * dev);int (*remove)(struct device * dev);void (*shutdown)(struct device * dev);int (*suspend)(struct device * dev, pm_message_t state);int (*suspend_late)(struct device * dev, pm_message_t state); int (*resume_early)(struct device * dev);int (*resume)(struct device * dev);unsigned int drivers_autoprobe:1;};我们注意到只有在bus_type结构中有kset结构,其他两个结构中则没有,我们知道kset结构是用于存放相同类型的kobject的,这究竟是个什么意思呢?kset又是为什么而存在的呢?为什么不能就是kobject呢?(关于kobject结构,我们很难抽象的形容,尽管它就是一个抽象的概念,我们将留待看代码的时候介绍,这里可以将kobject看成一个基类,kset 就是容器了)。
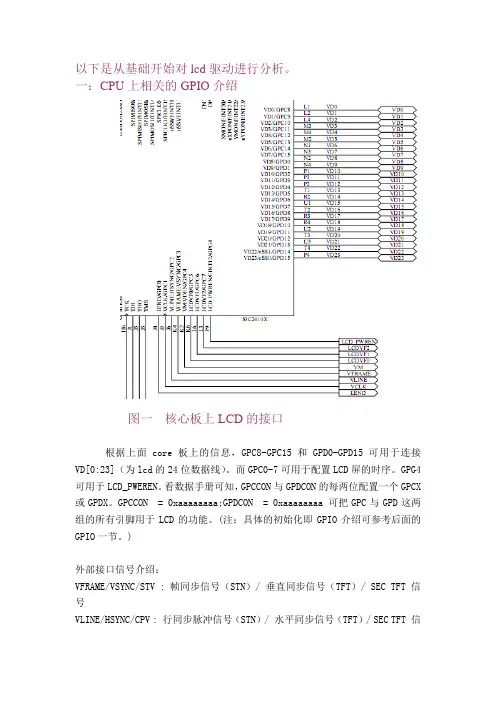
以下是从基础开始对lcd驱动进行分析。
一:CPU上相关的GPIO介绍图一核心板上LCD的接口根据上面core板上的信息,GPC8-GPC15和GPD0-GPD15可用于连接VD[0:23](为lcd的24位数据线)。
而GPC0-7可用于配置LCD屏的时序。
GPG4可用于LCD_PWEREN。
看数据手册可知,GPCCON与GPDCON的每两位配置一个GPCX 或GPDX。
GPCCON = 0xaaaaaaaa;GPDCON = 0xaaaaaaaa 可把GPC与GPD这两组的所有引脚用于LCD的功能。
(注:具体的初始化即GPIO介绍可参考后面的GPIO一节。
)外部接口信号介绍:VFRAME/VSYNC/STV : 帧同步信号(STN)/ 垂直同步信号(TFT)/ SEC TFT 信号VLINE/HSYNC/CPV : 行同步脉冲信号(STN)/ 水平同步信号(TFT)/ SEC TFT 信号VCLK/LCD_HCLK : 像素时钟信号(STN/TFT)/ SEC TFT 信号VD[23:0] : LCD像素数据输出端口(STN/TFT/SEC TFT)VM/VDEN/TP : LCD驱动器交流信号(STN)/ 数据使能信号(TFT)/ SEC TFT 信号LEND/STH : 行结束信号(TFT)/SEC TFT 信号LCD_PWREN : LCD屏电源控制信号LCDVF0 : SEC TFT信号 OE(SEC表示Samsung Electronics Company)LCDVF1 : SEC TFT信号 REVLCDVF2 : SEC TFT信号 REVB注:上述信号的设置将会在后面的操作控制寄存器中讲到LCD的接口原理图(在dev中有,这里没有截出来):观察后可知S3C2410板子有两个74LVCH162245芯片,是为了增强驱动能力(具体可查74LVCH162245的数据手册),LCD_CON是LCD屏的接口。

一、开发平台搭建1.引言Linux操作系统在服务器领域的应用和普及已经有较长的历史,这源于它的开源特点以及其超越Windows的安全性和稳定性。
而近年来,Linux操作系统在嵌入式系统领域的延伸也可谓是如日中天,许多版本的嵌入式Linux系统被开发出来,如ucLinux、RTLinux、ARM-Linux等等。
在嵌入式操作系统方面,Linux的地位是不容怀疑的,它开源、它包含TCP/IP协议栈、它易集成GUI。
鉴于Linux操作系统在服务器和嵌入式系统领域愈来愈广泛的应用,社会上越来越需要基于Linux操作系统进行编程的开发人员。
浏览许多论坛,经常碰到这样的提问:“现在是不是很流行unix/linux下的c编程?所以想学习一下!但是不知道该从何学起,如何下手!有什么好的建议吗?各位高手!哪些书籍比较合适初学者?在深入浅出的过程中应该看哪些不同层次的书?比如好的网站、论坛请大家赐教!不慎感激!”鉴于读者的需求,在本文中,笔者将对Linux平台下C编程的几个方面进行实例讲解,并力求回答读者们关心的问题,以与读者朋友们进行交流,共同提高。
在本文的连载过程中,有任何问题或建议,您可以给笔者发送email:21cnbao@,您也可以进入笔者的博客参与讨论:/21cnbao。
笔者建议在PC内存足够大的情况下,不要直接安装Linux操作系统,最好把它安装在运行VMWare 虚拟机软件的Windows平台上,如下图:在Linux平台下,可用任意一个文本编辑工具编辑源代码,但笔者建议使用emacs软件,它具备语法高亮、版本控制等附带功能,如下图:2.GCC编译器GCC是Linux平台下最重要的开发工具,它是GNU的C和C++编译器,其基本用法为:gcc [options] [filenames]options为编译选项,GCC总共提供的编译选项超过100个,但只有少数几个会被频繁使用,我们仅对几个常用选项进行介绍。

中国地质大学
学术型硕士研究生培养方案
(报表)
学科代码081100
学科名称控制科学与工程
中国地质大学研究生院制表
填表日期:2013年11月
一、学科(专业)简介
二、学科方向
注:本表不够可加页,每个二级学科的研究方向一般为3—6个
三、培养目标与学习年限
四、课程设置
学科代码:081100
学科名称:控制科学与工程
课程内容提要
课程内容提要
课程内容提要
课程内容提要
课程内容提要
五、需阅读的主要经典著作和专业学术期刊目录
六、科研能力与水平及学位论文的基本要求。
以下电子书来源于宋宝华《Linux设备驱动开发详解:基于最新的Linux 4.0内核》第19章《Linux电源管理系统架构和驱动》本章导读Linux在消费电子领域的应用已经铺天盖地,而对于消费电子产品而言,省电是一个重要的议题。
本章将介绍Linux设备树(Device Tree)的起源、结构和因为设备树而引起的驱动和BSP 变更。
19.1节阐述了Linux电源管理的总体架构。
19.2~19.8节分别论述了CPUFreq、CPUIdle、CPU热插拔以及底层的基础设施Regulator、OPP以及电源管理的调试工具PowerTop。
19.9节讲解了系统Suspend to RAM的过程以及设备驱动如何提供对Suspend to RAM的支持。
19.10节讲解了设备驱动的Runtime suspend。
本章是相对《Linux设备驱动开发详解(第2版)》全新的一章内容,也是Linux设备驱动工程师必备的知识体系。
第十九章Linux电源管理系统架构和驱动1.Linux电源管理全局架构Linux电源管理非常复杂,牵扯到系统级的待机、频率电压变换、系统空闲时的处理以及每个设备驱动对于系统待机的支持和每个设备的运行时电源管理,可以说和系统中的每个设备驱动都息息相关。
对于消费电子产品来说,电源管理相当重要。
因此,这部分工作往往在开发周期中占据相当大的比重,图19.1呈现了Linux内核电源管理的整体架构。
大体可以归纳为如下几类:1.CPU在运行时根据系统负载进行动态电压和频率变换的CPUFreq2.CPU在系统空闲时根据空闲的情况进行低功耗模式的CPUIdle3.多核系统下CPU的热插拔支持4.系统和设备对于延迟的特别需求而提出申请的PM QoS,它会作用于CPUIdle的具体策略5.设备驱动针对系统Suspend to RAM/Disk的一系列入口函数6.SoC进入suspend状态、SDRAM自刷新的入口7.设备的runtime(运行时)动态电源管理,根据使用情况动态开关设备8.底层的时钟、稳压器、频率/电压表(OPP模块完成)支撑,各驱动子系统都可能用到图19.1 Linux电源管理系统架构2.CPUFreq驱动CPUFreq子系统位于drivers/cpufreq目录,负责进行运行过程中CPU频率和电压的动态调整,即DVFS(Dynamic Voltage Frequency Scaling,动态电压频率调整)。
嵌入式系统开发学习心得体会_经验总结本文主要介绍的是嵌入式系统开发学习心得体会及经验总结,首先介绍了嵌入式系统开发的三大关键点,其次推荐了嵌入式系统开发必读的书籍,最后介绍了学习嵌入式系统开发的体会及经验总结。
嵌入式系统开发简介嵌入式系统开发是对于除了电脑之外的所有电子设备上操作系统的开发,开发对象有手机,掌上电脑,机电系统等,一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统以及用户的应用程序等四个部分组成。
嵌入式系统是以应用为中心,以计算机技术为基础,并且软硬件可裁剪,适用于应用系统对功能、可靠性、成本、体积、功耗有严格要求的专用计算机系统。
它一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统以及用户的应用程序等四个部分组成,用于实现对其他设备的控制、监视或管理等功能。
嵌入式系统一般指非PC系统,它包括硬件和软件两部分。
硬件包括处理器/微处理器、存储器及外设器件和I/O端口、图形控制器等。
软件部分包括操作系统软件(OS)(要求实时和多任务操作)和应用程序编程。
有时设计人员把这两种软件组合在一起。
应用程序控制着系统的运作和行为;而操作系统控制着应用程序编程与硬件的交互作用。
嵌入式系统开发的三大关键点1、嵌入式系统是相对于PC平台而言的,使用的平台一般是针对ARM,PPC,DSP等非PC平台的,所以使用的编译和调试工具不是VC6.0,而是不同的平台需要专门的编译开发工具,交叉编译是嵌入式特有的概念;2、嵌入式系统往往指带有操作系统的系统,以前简单的系统可以直接在裸机(如51单片机)上开发,而现在OS成为嵌入式的一个基本特征,已经有各种实时内核或者全功能的OS,因此对程序员要求较高;3、嵌入式系统往往包括软件和硬件两个部分,软件开发人员往往也需要知道硬件的知识,只有知道硬件的特性才能开发出高性能的程序。
另外不想在PC上开发,驱动程序都已经有了,在嵌入式系统中由于所接的外设复杂,很多时候需要自己编写驱动程序,结果是在。
linux驱动学习i2c驱动架构davinc dm368 i2c驱动分析但是Linux的i2c驱动体系结构却有相当的复杂度,不管是叫linux i2c驱动还是单片机i2c驱动,其根本还是操作soc芯片内部的i2c模块(也叫i2c adapter)(读写i2c相关的寄存器)来产生start、stop还有ack信号而已。
linux设备驱动到底复杂在什么地方?假设soc芯片dm368有两个i2c adapter(368内部真正只有一个i2c模块):i2c_adapter1,i2c_adapter1;然后外部有三个i2c接口的设备i2c_device1,i2c_device2,i2c_device3。
现在要求在裸机下写出他们的驱动函数。
那么肯定要写出6个不同的驱动函数:i2c_adapter1_ReadWrite_i2c_device1();i2c_adapter1_ReadWrite_i2c_device2()i2c_adapter1_ReadWrite_i2c_device3()i2c_adapter2_ReadWrite_i2c_device1()i2c_adapter2_ReadWrite_i2c_device2()i2c_adapter2_ReadWrite_i2c_device3()设想一共有m个i2c adapter和n个外设i2c device,那么将需要m*n个驱动。
并且这m*n个驱动程序必要会有很大部分重复的代码,而且不利于驱动程序的移植。
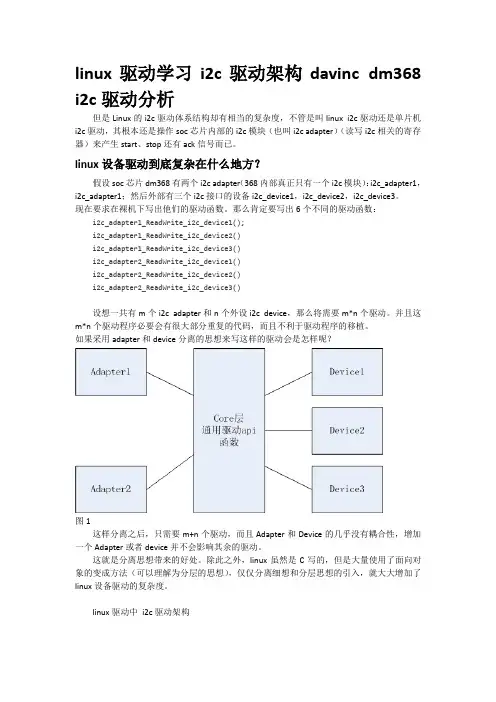
如果采用adapter和device分离的思想来写这样的驱动会是怎样呢?图1这样分离之后,只需要m+n个驱动,而且Adapter和Device的几乎没有耦合性,增加一个Adapter或者device并不会影响其余的驱动。
这就是分离思想带来的好处。
除此之外,linux虽然是C写的,但是大量使用了面向对象的变成方法(可以理解为分层的思想),仅仅分离细想和分层思想的引入,就大大增加了linux设备驱动的复杂度。
#define SND_SOC_DAIFMT_AC97 6 /* AC97 */#define SND_SOC_DAIFMT_PDM 7 /* Pulse density modulation */bit 4-7 用于设置接口时钟的开关特性:1. #def ine SND_SOC_DAIFMT_CONT (1 << 4) /* cont inuous clock */2. #def ine SND_SOC_DAIFMT_GAT ED (2 << 4) /* clock is gat ed */bit 8-11 用于设置接口时钟的相位1. #def ine SND_SOC_DAIFMT_NB_NF (1 << 8) /* normal bit clock + f rame */2. #def ine SND_SOC_DAIFMT_NB_IF (2 << 8) /* normal BCLK + inv FRM */3. #def ine SND_SOC_DAIFMT_IB_NF (3 << 8) /* invert BCLK + nor FRM */4. #def ine SND_SOC_DAIFMT_IB_IF (4 << 8) /* invert BCLK + FRM */bit 12-15 用于设置接口主从格式:1. #def ine SND_SOC_DAIFMT_CBM_CFM (1 << 12) /* codec clk & FRM mast er */2. #def ine SND_SOC_DAIFMT_CBS_CFM (2 << 12) /* codec clk slave & FRM mast er */3. #def ine SND_SOC_DAIFMT_CBM_CFS (3 << 12) /* codec clk mast er & f rame slave */4. #def ine SND_SOC_DAIFMT_CBS_CFS (4 << 12) /* codec clk & FRM slave */5. snd_soc_platform_driver中的ops字段该ops字段是一个snd_pcm_ops结构,实现该结构中的各个回调函数是socplat f orm驱动的主要工作,他们基本都涉及dma操作以及dma buf f er的管理等工作。
嵌入式Linux下ADS1256驱动程序的设计与实现段月骁;郭斌;胡晓峰;罗哉;陆艺【摘要】设计了S3C2440A和ADS1256基于SPI的接口电路,阐述了嵌入式Linux2.6.32.2下ADS1256驱动程序的开发、编译和加载过程,编写了相应的驱动程序和采集系统的测试程序.该驱动在气密性压力信号采集系统中的测试结果表明:驱动工作正常,采样结果正确.【期刊名称】《化工自动化及仪表》【年(卷),期】2015(042)012【总页数】5页(P1381-1385)【关键词】气密性检测系统;压力采集;ADS1256;驱动程序;Linux;SPI【作者】段月骁;郭斌;胡晓峰;罗哉;陆艺【作者单位】中国计量学院计量测试工程学院,杭州310018;中国计量学院计量测试工程学院,杭州310018;中国计量学院计量测试工程学院,杭州310018;中国计量学院计量测试工程学院,杭州310018;中国计量学院计量测试工程学院,杭州310018【正文语种】中文【中图分类】TH812在自动化测试系统中,处理器往往需要通过模数转换器获取传感器采集到的原始数据。
S3C2440A微处理器自带八通道10位的AD转换器,在测量精度要求不高时可以直接使用。
在实际应用中,为满足高精度测量要求,需要外扩模数转换器。
笔者选用24位分辨率带SPI接口的模数转换器ADS1256作为S3C2440A的外部AD转换器。
SPI是一种高速、全双工、同步通信总线。
因其传输稳定、高效、占用引脚数量少,在模数转换器、Flash及MCU等串行设备中应用广泛。
Linux是全球知名的开源自由多任务操作系统,任何人都可以在遵循GPL(General Public License)协议的基础上修改其源代码以适应实际需求。
正是Linux操作系统的免费、开放源代码及内核可裁剪等诸多优点,使其广泛应用于智能仪表及工业控制等嵌入式系统中。
笔者采用S3C2440A微处理器和嵌入式Linux操作系统作为开发平台,结合实际工程气密性检测系统,设计S3C2440A与ADS1256的SPI接口,详细分析了Linux2.6.32.2下ADS1256驱动程序的设计、编译、加载和测试过程。
深入浅出Linux 设备驱动编程之引言2006-10-1613:00作者:宋宝华出处:天极开发责任编辑:方舟相关专题:Linux 设备驱动程序开发入门目前,Linux 软件工程师大致可分为两个层次:(1)Linux 应用软件工程师(Application Software Engineer):主要利用C 库函数和Linux API 进行应用软件的编写;(2)Linux 固件工程师(Firmware Engineer):主要进行Bootloader、Linux 的移植及Linux 设备驱动程序的设计。
一般而言,固件工程师的要求要高于应用软件工程师的层次,而其中的Linux 设备驱动编程又是Linux 程序设计中比较复杂的部分,究其原因,主要包括如下几个方面:(1)设备驱动属于Linux 内核的部分,编写Linux 设备驱动需要有一定的Linux 操作系统内核基础;(2)编写Linux 设备驱动需要对硬件的原理有相当的了解,大多数情况下我们是针对一个特定的嵌入式硬件平台编写驱动的;(3)Linux 设备驱动中广泛涉及到多进程并发的同步、互斥等控制,容易出现bug;(4)由于属于内核的一部分,Linux 设备驱动的调试也相当复杂。
目前,市面上的Linux 设备驱动程序参考书籍非常稀缺,少有的经典是由Linux 社区的三位领导者Jonathan Corbet、Alessandro Rubini、Greg Kroah-Hartman 编写的《Linux Device Drivers》(目前该书已经出版到第3版,中文译本由中国电力出版社出版)。
该书将Linux 设备驱动编写技术进行了较系统的展现,但是该书所列举实例的背景过于复杂,使得读者需要将过多的精力投放于对例子背景的理解上,很难完全集中精力于Linux 驱动程序本身。
往往需要将此书翻来覆去地研读许多遍,才能有较深的体会。
本文将仍然秉承《Linux Device Drivers》一书以实例为主的风格,但是实例的背景将非常简单,以求使读者能将集中精力于Linux 设备驱动本身,理解Linux 内核模块、Linux 设备驱动的结构、Linux 设备驱动中的并发控制等内容。
33962010,31(15)计算机工程与设计Computer Engineering and Design0引言在嵌入式领域中,Linux2.6内核除了提高其实时性能,系统地移植更加方便,同时添加了新的体系结构和处理类型,可以支持大容量内存模型、微控制器,同时,还自带了很多总线驱动程序,虽然Linux 并非一个真正的实时操作系统,但2.6内核的改进能够满足大部分的应用需求,所以Linux2.6内核将会在嵌入式系统领域中大展身手[1]。
CAN (controller area network )是一种有效支持分布式控制或实时控制的串行通信网络,CAN 协议的最大特点是数据块的标识码可由11位或29位二进制数组成,可定义211或219个不同的数据块,使得CAN 总线构成的网络节点的数据通信实时性更强,提高了系统的可靠性和灵活性[2]。
传统的嵌入式系统CAN 总线驱动设计是基于嵌入式Linux2.4内核,本文着重研究和实现了在嵌入式Linux2.6内核的S3C2410开发板上使用Linux2.6自带的SPI 驱动实现CAN 总线的开发,并详细分析了在嵌入式Linux2.6.24内核下加载和声明SPI 总线的具体步骤,CAN 总线驱动初始化和中断控制的设计方法,以及CAN 驱动加载步骤。
1系统硬件设计系统硬件设计主要由微处理器S3C2410、带SPI 接口的独立CAN 控制器MCP2510与高速CAN 收发器TJA1050等器件组成[3]。
1.1芯片介绍(1)S3C2410:S3C2410是一款为手持设备和一般类型应用提供的一款高性能、低功耗、低价格微处理器。
内部采用高级微控制总线(AMBA )体系结构,主频高达203MHz ,集成3通道UART ,4通道DMA ,2通道的SPI [4]。
(2)MCP2510:MCP2510完全支持CAN 总线V2.0A/B 技术规范,能够发送和接收标准和扩展报文,同时具备验收过滤以及报文管理功能。