机械通气基本模式 (1)
- 格式:ppt
- 大小:4.60 MB
- 文档页数:88




机械通气的基本模式机械通气的目标和一般原则目标机械通气的主要目标是提供呼吸支持,同时使伤害最小化。
为此,机械通气用于保持足够的气体交换,同时最大限度地减少由于过度压力、容积和肺循环改变造成的损害。
像许多关键的干预措施一样,它是一种支持手段,它没有治疗原发病的能力。
呼吸力学机械通气通过在吸气时产生正压气体进入患者肺内提供呼吸支持,并允许被动呼气。
在被动或麻醉的患者中,吸气将完全由呼吸机控制。
在有呼吸驱动的患者中,患者的努力产生的吸气气流将导致呼吸机工作。
为了进行呼吸,呼吸机对气体加压,以克服气道阻力(来自呼吸机管路、气管插管和气道)以及肺部和周围结构的弹性阻力。
更简单地说,给肺充气所需的压力是由呼吸系统的阻力和顺应性决定的。
当阻力增加、顺应性恶化(呼吸系统变得僵硬,表明单位压力变化的体积变化较小),或两者都发生时,需要更高压力。
了解问题的所在——高阻力或顺应性差——可以帮助确定呼吸衰竭或呼吸肌突然失代偿的最初原因,并相应地指导管理。
气道阻力高、顺应性差的常见原因:呼吸回路中影响阻力的区域,包括呼吸机管路、气管插管和细支气管水平的气道。
影响顺应性的区域包括:肺实质(肺泡)、胸膜腔、胸壁、腹部以及胸壁外对肺泡施加力的任何部位。
呼气是一个被动的过程,由肺泡内高压力和呼吸机内低压力之间的压力梯度引起。
重要的是,呼吸机可以应用呼气末正压(PEEP)来降低这种压力梯度,防止过度的肺塌陷。
相变量是机械通气呼吸周期中各个阶段的切换指标,包括触发,限制以及切换。
触发:触发变量决定了吸气何时发生。
这里特指时间(上次呼吸结束)或患者吸气努力所产生的流速或压力被探测到而诱发。
压力或流量作为患者开始呼吸的触发很少具有临床重要性。
控制(或限制):控制变量决定了呼吸机如何进行呼吸。
它要么是流速,要么是压力。
流量控制,呼吸机以特定的流速(例如,每分钟60升)送气。
压力控制,呼吸机在吸气时保持特定的压力,流量由于呼吸机和患者肺之间的压差而产生。
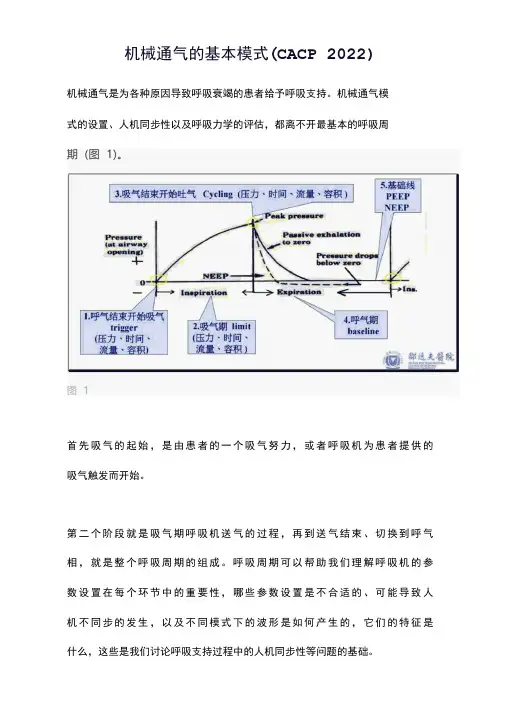
机械通气的基本模式(CACP 2022)机械通气是为各种原因导致呼吸衰竭的患者给予呼吸支持。
机械通气模式的设置、人机同步性以及呼吸力学的评估,都离不开最基本的呼吸周首先吸气的起始,是由患者的一个吸气努力,或者呼吸机为患者提供的吸气触发而开始。
第二个阶段就是吸气期呼吸机送气的过程,再到送气结束、切换到呼气相,就是整个呼吸周期的组成。
呼吸周期可以帮助我们理解呼吸机的参数设置在每个环节中的重要性,哪些参数设置是不合适的、可能导致人机不同步的发生,以及不同模式下的波形是如何产生的,它们的特征是什么,这些是我们讨论呼吸支持过程中的人机同步性等问题的基础。
容量控制型通气这个是一个容量控制型通气的波形(如图2)。
我们都知道整个呼吸支持分为两大类,一类是以容量为目标的通气方标是潮气量,呼吸机送气达到潮气量,然后切换成呼气相。
另一式,大类就是以压力为目标的通气类型,其中包括PCV (压力控制型通标为压力,需要设置维持压力的时间;以及PSV (压力支持通气),也就是自主呼吸模式,也是以压力为目标的。
那么首先我们来看容量控制型通气,我们从波形特征上就看到它的目标是潮气量,所以在容量时间曲线上,我们能够看到它的每一次呼吸的潮气量目标都是一致的。
变化的就是当患者的气道顺应性下降或者气道阻力增加的时候,它的压力会有变化。
我们推荐容量控制型通气,作为所有机械通气患者最初始的通气模式。
通常设定 6 - 8mL / kg的理想公斤体重为目标潮气量。
而对于ARDS 患者要进行肺保护性通气,可能的设置目标潮气量为 4 ~ 6 mL / kg , 甚至更小。
流速的大小决定了吸气时间的长短。
在图2这样的波形上,我们看到流量时间曲线是一个恒定流速的方波,恒定流速的方波送气能够帮助我们在容量控制型通气的时候进行静态力学的评估。
在机器送气的过程中,在患者的吸气末有一个屏气,也就是流量到0的这样的一个屏气时间,我们看到了吸气的峰压,吸气末屏气的时间出现得就是平台压(Pp∣at),这样的一个波形就是我们最常用的静态力学的一个评估方法。
机械通气的基本模式(一)定容型通气VPV和定压型通气PPV:1.定容型通气:呼吸机以预设通气容量来管理通气,即呼吸机送气达预设容量后停止送气,依靠肺、胸廓的弹性回缩力被动呼气。
常见的定容型通气模式:容量控制通气,容量辅助-控制通气、IMV和同步间歇指令通气SIMV等,统称为容量预设型通气VPV。
优点:VPV能够保证VT的恒定,从而保障分钟通气量。
缺点:VPV的吸气流速波形为恒流波形,即方波,不能适应患者的吸气需要,尤其存在自主呼吸的患者,这种人机的不协调可增加镇静剂和肌松剂的需要,并消耗很高的吸气功,从而诱发呼吸肌疲劳和呼吸困难。
当肺顺应性较差或气道阻力增加时,使气道压过高。
2.定压型通气:呼吸机以预设气道压力来管理通气,即呼吸机送气达预设压力且吸气相维持该压力水平,而VT是由气道压力与PEEP之差及吸气时间决定,并受呼吸系统顺应性和气道阻力的影响。
常见的定压型通气模式:PCV、压力辅助控制通气(P-PCV)、压力控制-同步间歇指令通气(PC-SIMV)、PSV等,统称为压力预设型通气PPV。
优势:PPV时VT随肺顺应性和气道阻力而改变,气道压力一般不会超过预置水平,以限制肺泡压过高和预防呼吸机相关性肺损伤(VILI),流速多为减速波,肺泡在吸气早期即充盈,利于肺内气体交换。
(二)控制通气CV和辅助通气AV1.CV:由呼吸机控制通气频率、潮气量和呼吸比(CV),自主呼吸与机器不同步,应用于病人无自主呼吸或自主呼吸较弱,不能较好触发呼吸机通气,如麻醉、中枢神经系统功能障碍、神经肌肉疾病、药物过量等。
呼吸机提供全部呼吸功。
不足:在CV 时可对患者呼吸力学进行监测,如静态肺顺应性、PEEPi、阻力、肺机械参数。
参数设置不当,可造成通气不足或过度通气;应用镇静剂或肌松剂将导致分泌物清除障碍等;长时间应用CV将导致呼吸肌萎缩或呼吸机依赖。
故应用CV时应明确治疗目标和治疗终点,对一般的急性或慢性呼衰,只要患者条件允许宜尽早采用AV支持。
机械通气的常见模式
1. 辅助控制通气(ACV),也称为同步间歇强制通气(Synchronized Intermittent Mandatory Ventilation, SIMV)。
它是机械通气的最基本模式,设定了呼吸频率和潮气量,机械通气在这个频率和潮气量下进行。
如果病人自己呼吸,机械通气不干预,如果病人没有呼吸,则机械通气按照设定的频率和潮气量进行呼吸。
2. 压力控制通气(PCV),与ACV不同,PCV设定压力限制,并根据这个限制在吸气期间送出气体。
这种模式的减少的肺部损伤,但可能降低气体交换效率。
3. 容量控制通气(VCV),有别于PCV,VCV主要是将每次送气量固定、缓慢送入,而不是对压力控制来进行。
这种模式使用的比较多。
4. 吸氧模式,主要是使用吸氧搭配机械通气,可以减少病人使用呼吸器时的不适和疼痛,也可以降低氧化损伤。