双闭环控制的串级调速系统的设计
- 格式:doc
- 大小:284.50 KB
- 文档页数:14

晶闸管串级调速双闭环系统方案晶闸管串级调速双闭环系统是一种常用的电力传动系统,广泛应用于工业生产中。
它通过晶闸管的调速和闭环控制,能够实现对电机转速的精确控制,提高系统的稳定性和可靠性。
下面将详细介绍晶闸管串级调速双闭环系统的方案。
1.系统结构2.系统原理(1)速度闭环:系统首先通过速度传感器测量电机的转速,将实际转速与给定转速进行比较,得到速度误差信号。
然后将速度误差信号通过比例积分控制器进行处理,得到电机的转速控制信号。
最后,转速控制信号经过PWM调制器和晶闸管触发控制电路,实现对晶闸管的控制,从而控制电机的转速。
(2)电流闭环:系统通过电流传感器测量电机的输出电流,将实际电流与给定电流进行比较,得到电流误差信号。
然后将电流误差信号通过比例积分控制器进行处理,得到电机的电流控制信号。
最后,电流控制信号经过PWM调制器和晶闸管触发控制电路,实现对晶闸管的控制,从而控制电机的输出电流。
3.系统参数设计为了保证系统的稳定性和可靠性,需要根据实际需求对系统的参数进行设计。
主要设计参数包括速度闭环的比例系数Kp1和积分时间常数Ti1,以及电流闭环的比例系数Kp2和积分时间常数Ti2(1)速度闭环参数设计:根据实际需求确定速度闭环的比例系数Kp1和积分时间常数Ti1、一般情况下,比例系数Kp1的值越大,系统的响应速度越快但稳定性越差;积分时间常数Ti1的值越大,系统对于长期速度误差的补偿能力越强但抗干扰能力越差。
因此,需要在速度响应速度和稳定性之间进行权衡,选择合适的参数。
(2)电流闭环参数设计:根据实际需求确定电流闭环的比例系数Kp2和积分时间常数Ti2、一般情况下,比例系数Kp2的值越大,系统的响应速度越快但稳定性越差;积分时间常数Ti2的值越大,系统对于长期电流误差的补偿能力越强但抗干扰能力越差。
因此,需要在电流响应速度和稳定性之间进行权衡,选择合适的参数。
4.系统优化设计为了进一步提高系统的性能和可靠性,可以对晶闸管串级调速双闭环系统进行优化设计。
本设计主要介绍了双闭环调速系统的电路原理图及动态结构图,并按工程设计设计法对双闭环调速系统的ACR及ASR进行设计。
在工程设计中阐述了需要注意的问题。
并对晶闸管的电压、电流作了定额计算,及平波电抗器的计算。
最后得出双闭环调速系统的主、控电路图并作了总结及设计心得。
关键词:双闭环,ASR,ACR,晶闸管。
1 引言 (1)2 双闭环调速系统的组成 (2)2.1双闭环调速系统电路原理图 (2)2.2双闭环调速系统动态结构图 (2)3 按工程设计方法设计双闭环系统的ACR和ASR (4)3.1ACR的设计 (4)3.2ASR的设计 (5)4 采用工程方法设计时需注意的问题 (8)5 晶闸管的电压、电流定额计算 (10)5.1晶闸管额定电压U N (10)5.2晶闸管额定电流I N (10)6 平波电抗器计算 (11)7 双闭环调速系统主、控电路图 (12)8 结论 (13)9 体会 (14)10 参考文献 (15)1 引言采用转速负反馈和PI调节的单闭环调速系统可以实现转速的无静差,如果附带电流截止负反馈作限流保护可以限制电流的冲击,但并不能控制电流的动态波形。
我们希望系统在启动时,一直能有电机过载能力允许条件下的最大电流,电机有最大的启动转矩和最短的启动时间。
这一点利用电流截止负反馈是很难实现的。
另外,在单闭环调速系统中,用一个调节器综合多种信号,各参数间相互影响,难于进行调节器的参数调速。
例如,在带电流截止负反馈的转速负反馈的单闭环系统中,同一调节器担负着正常负载时的速度调节和过载时的电流调节,调节器的动态参数无法保证两种调节过程均具有良好的动态品质。
为了解决单闭环调速系统存在的问题,可以采用转速、电流串级调速系统,即转速电流双闭环调速系统,采用两个调节器分别对转速和电流进行调节。
2 双闭环调速系统的组成2.1双闭环调速系统电路原理图图2-1为转速、电流双闭环调速系统的原理图。
图中两个调节器ASR 和ACR 分别为转速调节器和电流调节器,二者串级连接,即把转速调节器的输出作为电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置。

双闭环直流调速系统设计一、系统组成与数学建模1)系统组成为了实现转速和电流两种负反馈分别起作用,可在系统中设置两个调节器,分别调节转速和电流,即分别引入转速负反馈和电流负反馈。
二者之间实行嵌套(或称串级)联接如下图所示。
L+-图中,把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。
从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环。
这就形成了转速、电流双闭环调速系统。
为了获得良好的静、动态性能,转速和电流两个调节器一般都采用P I 调节器,这样构成的双闭环直流调速系统的电路原理图示于下图。
图中标出了两个调节器输入输出电压的实际极性,它们是按照电力电子变换器的控制电压U c为正电压的情况标出的,并考虑到运算放大器的倒相作用。
2)数学建模图中W ASR(s)和W ACR(s)分别表示转速调节器和电流调节器的传递函数。
如果采用PI调节器,则有ss K s W i i iACR 1)(ττ+= ss K s W n n nASR 1)(ττ+=二、 设计方法采用工程设计法 1、设计方法的原则: (1)概念清楚、易懂; (2)计算公式简明、好记;双闭环直流调速系统的动态结构图(3)不仅给出参数计算的公式,而且指明参数调整的方向; (4)能考虑饱和非线性控制的情况,同样给出简单的计算公式; (5)适用于各种可以简化成典型系统的反馈控制系统。
2、工程设计方法的基本思路:(1)选择调节器结构,使系统典型化并满足稳定和稳态精度。
(2)设计调节器的参数,以满足动态性能指标的要求。
一般来说,许多控制系统的开环传递函数都可表示为∏∏==++=n1i irm1j j )1()1()(s T ss K s W τ上式中,分母中的 sr 项表示该系统在原点处有 r 重极点,或者说,系统含有 r 个积分环节。
根据 r=0,1,2,……等不同数值,分别称作0型、I 型、Ⅱ型、……系统。
双闭环控制的串级调速系统3. 调节器参数的设计双闭环控制串级调速系统的动态校正一般主要按抗扰性能考虑,即应使系统在负载扰动时有良好的动态响应。
在采用工程设计方法进行动态设计时,可以像直流调速系统那样,电流环按典型I型系统设计,转速环按典型Ⅱ型系统设计。
但是串级调速系统中转子直流回路的时间常数 T Lr及放大系数 K Lr 都是转速的函数,而异步电动机的机电时间常数 T M又是转速和电流的函数,这就给调节器的设计带来一定的困难。
具体设计时,可以先在确定的转速 n 和负载电流 I d的前提下,求出各传递函数中的参数。
例如,按照要求的最大转差率S m ax或平均转差率1/2S m ax来确定转速,按额定负载或常用的实际负载来选定电流,然后按定常系统进行设计。
如果用模拟控制系统实现,则当实际转速或电流改变时,系统的动态性能就要变坏。
如果采用微机数字控制,可以按照不同的转速和电流事先计算好参数的变化,用表格的方式存入微机,实时控制时可根据检测得到的转速和电流查表调用,就可以得到满意的动态特性。
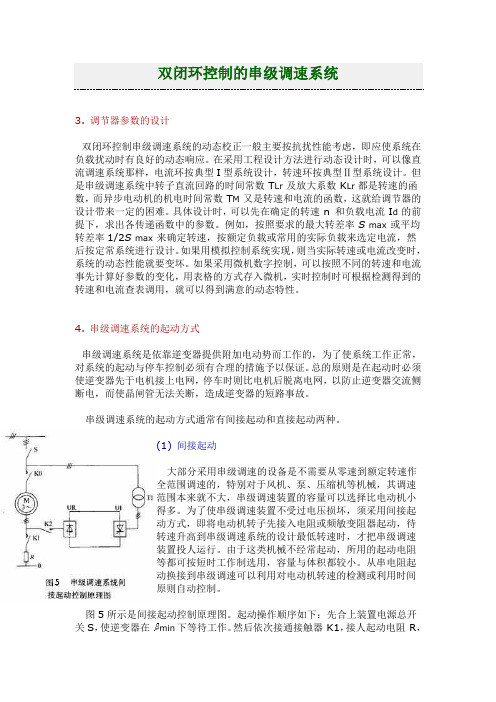
4. 串级调速系统的起动方式串级调速系统是依靠逆变器提供附加电动势而工作的,为了使系统工作正常,对系统的起动与停车控制必须有合理的措施予以保证。
总的原则是在起动时必须使逆变器先于电机接上电网,停车时则比电机后脱离电网,以防止逆变器交流侧断电,而使晶闸管无法关断,造成逆变器的短路事故。
串级调速系统的起动方式通常有间接起动和直接起动两种。
(1) 间接起动大部分采用串级调速的设备是不需要从零速到额定转速作全范围调速的,特别对于风机、泵、压缩机等机械,其调速范围本来就不大,串级调速装置的容量可以选择比电动机小得多。
为了使串级调速装置不受过电压损坏,须采用间接起动方式,即将电动机转子先接入电阻或频敏变阻器起动,待转速升高到串级调速系统的设计最低转速时,才把串级调速装置投人运行。
由于这类机械不经常起动,所用的起动电阻等都可按短时工作制选用,容量与体积都较小。
1 设计方案论证电流环调节器方案一,采用PID调节器,PID调节器是最理想的调节器,能够平滑快速调速,但在实际应用过程中存在微分冲击,将对电机产生较大的冲击作用,一般要小心使用。
方案二,采用PI调节器,PI调节器能够做到无静差调节,且电路较PID调节器简单,故采用方案二。
转速环调节器方案一,采用PID调节器,PID调节器是最理想的调节器,能够平滑快速调速,但在实际应用过程中存在微分冲击,将对电机产生较大的冲击作用,一般要小心使用。
方案二,采用PI调节器,PI调节器能够做到无静差调节,且电路较PID调节器简单,故采用方案二。
2双闭环调速控制系统电路设计及其原理综述随着现代工业的开展,在调速领域中,双闭环控制的理念已经得到了越来越广泛的认同与应用。
相对于单闭环系统中不能随心所欲地控制电流和转矩的动态过程的弱点。
双闭环控制那么很好的弥补了他的这一缺陷。
双闭环控制可实现转速和电流两种负反应的分别作用,从而获得良好的静,动态性能。
其良好的动态性能主要表达在其抗负载扰动以及抗电网电压扰动之上。
正由于双闭环调速的众多优点,所以在此有必要对其最优化设计进展深入的探讨和研究。
本次课程设计目的就是旨在对双闭环进展最优化的设计。
整流电路本次课程设计的整流主电路采用的是三相桥式全控整流电路,它可看成是由一组共阴接法和另一组共阳接法的三相半波可控整流电路串联而成。
共阴极组VT1、VT3和VT5在正半周导电,流经变压器的电流为正向电流;共阳极组VT2、VT4和VT6在负半周导电,流经变压器的电流为反向电流。
变压器每相绕组在正负半周都有电流流过,因此,变压器绕组中没有直流磁通势,同时也提高了变压器绕组的利用率。
三相桥式全控整流电路多用于直流电动机或要求实现有源逆变的负载。
为使负载电流连续平滑,有利于直流电动机换向及减小火花,以改善电动机的机械特性,一般要串入电感量足够大的平波电抗器,这就等同于含有反电动势的大电感负载。
三相桥式全控整流电路的工作原理是当a=0°时的工作情况。
摘要绕线式异步电动机的串级调速系统,属于改变转差功率的调速系统,在我国交流调速技术的发展中,它是结构简单、发展较快、应用较广的一种系统。
其基本原理是利用不可控的整流电路将转子交流电动势转成直流电动势,在利用工作的在逆变状态的三相可控整流电路来获得一个可调的直流电压作为附加电动势,以改变转差功率,以实现转速的调节。
串级调速完全克服了转子串电阻调速的缺点,它具有高效率、无级平滑调速、较硬的低速机械特性等优点。
本设计介绍了双闭环异步电动机串级调速方式的设计,主要设计方面包括调速方式的设计,主接线的设计,串级调速主电路的设计,保护电路的设计,触发器的选择,直接启动方式。
首先根据设计要求确定调速方案和主电路的结构型式,主电路和闭环系统确定下来后,重在对电路各元件参数的计算和器件的选型,包括整流变压器、整流元件、平波电抗器、保护电路以及电流和转速调节器的参数计算,从而达到设计要求,其中有绘制完整的双闭环控制的异步电动机串级调速系统图,主接线图,控制电路图,最后采用了MATLAB建模与仿真证明了该系统。
关键字:串级调速;主电路;调速范围;转差率IAbstractThe wound rotor asynchronous motor cascade speed regulation system, is to use change slip power control speed regulation system. In the development of ac speed regulation technology in China. It is a system of simple structure, rapid development, wider application. Its basic principle is to put the rotor AC electromotive force into DC emfs by Uncontrolled rectifier circuit. Taking advantage of working in a state of three-phase inverter controlled rectifier circuit for an adjustable DC voltage as additional electromotive force, to change the slip power, in order to realize speed regulation. Cascade speed regulation completely overcomes the drawback of rotor series resistance speed control, it has high efficiency, stepless smooth speed regulation, a hard low mechanical properties etc.the design of the double closed loop of asynchronous motor cascade speed control mode,It mainly includes the design of speed control mode, main wiring ,the main circuit, protective circuit , the choice of the trigger and direct startup mode。
基于PLC的双闭环串级调速系统的设计摘要本文用电源反相序和动力制动的方法设计了双闭环串级调速系统的可逆和制动控制线路。
双闭环调速系统的性能很好,具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动系统中得到了广泛的应用。
本设计报告首先根据设计要求确定调速方案和主电路的结构型式,直流双闭环调速系统中设置了两个调节器, 即转速调节器(ASR)和电流调节器(ACR), 分别调节转速和电流。
接着详细介绍了电流调节器和转速调节器的设计以及一些参数的选择和计算,使其满足工程设计参数指标。
并阐述了串接附加电阻在切换过程中的重要性。
对其电气操作线路用可编程序控制器予以实现。
关键词:可编程序控制器、调速系统、程序控制器、异步电动机第1章:引言 (3)第2章:双闭环串级调速系统的可逆和制动方案 (4)第3章:串级调速系统的动态数学模型 (6)3.1转子直流回路的传递函数 (6)3.2异步电动机的传递函数 (8)3.3串级调速系统的动态结构框图 (9)第4章:调节器参数的设计 (10)4.1电流环的设计 (10)4.2转速环的设计 (12)第5章串级调速系统的起动方式 (15)5.1间接起动 (15)5.2直接启动 (17)第6章:操作控制电路 (18)6.1PLC的选择 (18)6.2可编程序控制器的I/O接口 (18)6.3操作线路图的梯形图 (19)6.4可编程序控制器程序清单 (21)结束语 (24)参考文献 (25)第1章:引言由于串级调速系统机械特性的静差率较大,所以开环控制系统只能用于对调速精度要求不高的场合。
为了提高静态调速精度,并获得较好的动态特性,须采用闭环控制,通常采用具有电流反馈与转速反馈的双闭环控制方式。
由于串级调速系统的转子整流器是不可控的,系统本身不能产生电气制动作用,所谓动态性能的改善只是指起动与加速过程性能的改善,减速过程只能靠负载作用自由降速。
第2章:双闭环串级调速系统的可逆和制动方案系统组成方框图如图所示图1 双闭环控制串级调速系统主电路图图1 所示为双闭环控制的串级调速系统原理图。
摘要本毕业论文所研究的是双闭环三相异步电动机的串级调速的基本原理与实现方法。
对于绕线式异步电动机来说,由于改变其转子绕组控制变量以实现调速,转子侧的控制变量有电流、电动势、电阻等。
通常转子电流随负载的大小决定,不能任意调节;而转子回路阻抗的调节属于耗能型调速,缺点较多,所以转子侧的控制变量只能是电动势,这也是本文所要研究的重点之一。
利用串级调速系统,就是使绕线式异步电动机实现高性能调速的有效办法。
用转子串反电动势来代替电阻,吸收转差功率;用双闭环控制提高系统的静、动态性能。
把这种用附加电动势的方法将转差功率回收利用的调速称为双闭环串级调速。
这是本文所必须研究的,也是本文的核心所在。
并通过利用MATLAB 软件对双闭环串级调速系统进行仿真,仿真结果表明通过双闭环串级调速系统能及时地对给定速度进行反馈,提高调速的准确性。
关键词:双闭环;串级;调速;MATLAB.AbstractThe graduation thesis studies three-phase asynchronous motor is double loop bunch_rank speed-control of the basic principle and implement method. With wound rotor series, asynchronous motors can adjust speeds through control variables, which include electric current, electromotive force and resistance, etc. on the rotor side. Typically, the rotor current is determined by the load and cannot be adjusted freely. In contrast, adjusting rotor’s return circuit impedance tends to consume more power along with other disadvantages. Therefore, electromotive force should be the only control variable on the rotor side, which is also one of the major points research in this paper.In summary, concatenation control system is one effective means to realize high control ability in series-wound asynchronous motors. Specifically, it is used to replace resistance with rotor’s electromotive force and absorb slip power; and to enhance the static and dynamic capabilities of the system using double closed loop. We refer to this method of utilizing additional electromotive force to recycle slip power as concatenation control with double close loop, which is also the focus of this paper. And through the use of MATLAB software on the double closed loop bunch_rank speed- control system, and simulation draw simulation diagram,the results show that by double closed loop bunch_rank speed-control system can timely given speed feedback, to improve the accuracy of speedKeywords: double-loop;cascade;governor;MATLAB.目录摘要 (I)Abstract (II)1绪论 (1)2串级调速的原理 (3)2.1异步电动机转子附加电动势时的工作情况 (3)2.2串级调速的功率传递关系 (4)2.3串级调速系统及其附加电动势的获得 (5)3双闭环三相异步电机的静态特性和动态特性 (9)3.1三相异步电动机串级调速开环工作机械特性 (9)3.2三相异步电动机单闭环ASR 系统静特性 (11)3.3双闭环调速系统的静态和动态特性 (13)4总体设计方案 (17)4.1双闭环三相异步电机串级调速各个模块的功能 (17)4.2串级调速系统设计 (23)4.3双闭环系统设计 (24)4.4总电路图的设计 (25)5系统仿真 (27)5.1仿真软件的简介 (27)5.2具体的软件仿真设计 (27)5.3系统的仿真、仿真结果的输出及结果分析 (36)总结 (37)参考文献 (38)致谢 (39)1绪论电力传动自动控制系统是把电能转换成机械能的装置。
学号:200925180112 中州大学电机及拖动课程设计
题目:双闭环控制的串级调速系统的设计
姓名:陈家俊
专业:电气自动化
班级:电气对口班
指导老师:路老师
2010年7月1
目录
摘要 (3)
Abstract (4)
一基本构思 (5)
二直流双闭环调速系统的总设计方案 (6)
2.1双闭环串级调速的系统组成 (6)
2.2直流双闭环调速系统的原理图 (7)
三直流双闭环调速系统电路设计 (8)
3.1晶闸管原理 (8)
3.2串级调节器的动态结构设计 (9)
3.2.1电流调节器设计 (9)
3.2.2转速调节器设计 (10)
3.2.3转速检测电路设计 (10)
3.2.4电流检测电路设计 (11)
设计总结 (12)
致谢 (13)
参考文献 (14)
摘要
本文所论述的是“双闭环串极调速系统的主电路设计方法”。
直流双闭环调速系统的性能很好,具有调速范围广、精度高、动态性能好和易于控制等优点,所以在电气传动系统中得到了广泛的应用。
本设计报告首先根据设计要求确定调速方案和主电路的结构型式,直流双闭环调速系统中设置了两个调节器, 即转速调节器(ASR)和电流调节器(ACR), 分别调节转速和电流。
接着详细介绍了电流调节器和转速调节器的设计以及一些参数的选择和计算,使其满足工程设计参数指标。
关键词:直流双闭环;串级调速系统;电流调节器;转速调节器
Abstract
This paper is "double closed loop speed regulating pole of the main circuit system design method". Dc double closed loop speed regulation system performance is very good, with wide speed range, high precision, good dynamic performance and easy to control the advantages in electrical transmission system, so widely used.
This design according to the requirement of design first report of the main circuit and control scheme structure, dc double closed loop speed regulation system, set up two regulator (ASR) and the speed regulator (ACR), the current regulator adjusting speed and the current respectively. Then detailed introduces current regulator and speed regulator and some parameter selection and calculation, which satisfy the design parameters.
Keywords: dc double closed loop, Bunch _ rank speed-control system, Current regulator, Speed regulator
一基本构思
本课程设计就要求结合给定的初始条件来完成直流双闭环调速系统的设计,其中包括绘制该调速系统的原理图,对调节器进行工程设计,选择调节器的参数等。
要实现直流双闭环调速系统的设计需先对控制系统的组成及工作原理有一定深入的理解,弄清楚调速系统每个组成部分的作用,弄清楚转速环和电流环的工作原理,合理选择调节器的参数以便进行合理的工程设计。
本设计通过变流系统将调节绕组从主绕组感应过来的电势串入电机的转子绕组,改变其串入电势的大小来实现调速。
即将内反馈串级调速电动机的部分转子能量取出以改变电动机转差率来实现调速的。
二直流双闭环调速系统的总设计方案
2.1双闭环串级调速的系统组成
图2-1双闭环控制的串级调速系统结构框图
图2-1所示为具有双闭环控制的串级调速系统原理图。
图中转速反馈信号取自与异步电机同轴的测速发电机,电流反馈信号取自逆变器交流侧,也可通过直流互感器取自转子直流回路。
由于调速系统的主要被控量是转速, 故把转速负反馈组成的环作为外环, 以保证电动机的转速准确跟随给定电压, 把由电流负反馈组成的环作为内环, 把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE,这就形成了转速、电流双闭环调速系统。
如图2-2所示:
图2-2 直流双闭环调速系统
2.2直流双闭环调速系统的原理图
为了获得良好的静、动态性能,转速和电流两个调节器一般都采用PI 调节
器,这样构成的双闭环直流调速系统的电路原理图如2-3图所示
图2-3双闭环直流调速系统电路原理图
三直流双闭环调速系统电路设计
3.1晶闸管原理
晶闸管-电动机调速系统(V-M系统)主电路原理图如图3-1所示:
图3-1 V-M系统主电路原理图
图中VT是晶闸管可控整流器,它由三相全控桥式整流电路组成,如图3-2所示:
图3-2 三相全控桥式整流电路
通过调节触发装置GT的控制电压
U来移动脉冲的相位,即可改变平均整流
c
电压
U,从而实现平滑调速。
d
3.2串级调节器的动态结构设计
转速、电流双闭环调速系统的动态结构图如图3-3所示:
图3-3双闭环控制串级调速系统动态结构框图
3.2.1电流调节器设计
其中*i U 为电流给定电压,d I β-为电流负反馈电压,c U 为电力电子变换器的控制电压。
根据设计要求σ≤5%,并保证稳态电流无差,可按典型I 型系统设计电流调节器。
电流环控制对象是双惯性型的,因此可用PI 型电流调节器,其传递函数为
W(s)=Ki(τi S+1)/τi S 。
检查对电源电压的抗干扰性能各项指标都是可以接受的。
3.2.2转速调节器设计
其中*n U 为转速给定电压,n α-为转速负反馈电压,*i U :调节器的输出是电流调
节器的给定电压。
由于设计要求无静差,故选用PI 型电流调节器,其传递函数为 W(s)=Ki(τiS+1)/τiS 。
3.2.3转速检测电路设计
转速的检测可把n U 接到一个测速发电机上即可检测转速,如图3-7所示:
TG
U2
Un
RP4
.
图3-7 转速检测电路
3.2.4电流检测电路设计
使用霍尔电流传感器可以检测电流,把
U接到霍尔传感器上。
霍尔效应传
i
感器,可以测量任意波形的电流和电压。
输出端能真实地反映输入端电流或电压的波形参数。
如图3-8所示:
设计总结
通过本次课程设计,首先对直流双闭环调速系统有了更深的认识,也是对课堂所学知识的一次很好的应用,也增加了我对学习控制类相关学科的兴趣。
经过几天的设计体会,我终于了解到在电路的设计之前一定要收集好资料,做好一定的准备然后再开始进行电路的设计。
制作电路的过程中应当需要一定的耐心和细心,更需要一定的理论知识作为基础,毕竟第一次做课程设计。
但经过小组人一起的努力,通过网络、有关书籍的查阅最终还是完成了。
从中也让我感到团队合作的重要性。
致谢
在此次课程设计中,我的任课老师倾注了大量的心血,同学交上作业之后老师一遍又一遍地指出每稿中的具体问题,并且把更改细节标的清清楚楚,老师用他的辛苦一步一步引导我们走向成功,在此我对老师表示衷心的感谢。
心中只想对老师说一声:老师,我永远向您学习!!!
参考文献
[1] 任彦硕.自动控制原理.北京:机械工业出版社,2006
[2] 陈治明主编.电力电子器件. 北京:机械工业出版社,1992
[3]黄俊主编.电力电子变流技术.北京:机械工业出版社,1996
[4]李华德主编.交流调速控制系统.北京:电子工业出版社,2003
[5] 王兆安黄俊主编.电力电子技术.北京:机械工业出版社,2000。