浮筒的波浪力计算_冯铁城
- 格式:pdf
- 大小:144.50 KB
- 文档页数:5
3.2.1 风、水流和波浪对浮体产生的作用力风、水流和波浪对浮体产生的作用力参照前苏联《波浪、冰凌和船舶对水工建筑物的荷载与作用》计算。
(1)风对浮体作用的横向分力和纵向分力见3.2.1.1。
(2)水流对浮体作用的横向分力和纵向分力水流对浮体作用的横向分力和纵向分力按以下公式计算:20.59x x x F A v =20.59y y yF A v = 式中:F x 、F y —趸船计算水流力的横向分力和纵向分力(kN);A x 、A y —浮趸水下横向和纵向阻水面积(m 2); v x 、v y —设计水流流速的横向和纵向分量(m/s)。
浮趸水面以下的阻水面积计算:A x =45×0.6=27m 2; A y =7×0.6=4.2m 2 作用在趸船上的水流力:20.5927 1.5538.27kN x F =⨯⨯=20.59 4.2 1.55 5.95kN y F =⨯⨯= (3)波浪对浮体的作用力波浪对浮体的横向分力和纵向分力按以下公式计算:1x x Q ghA χτρ= y y Q ghA χρ=式中:Qx 、Qy —趸船计算波浪力的横向分力和纵向分力(kN); χ—系数,按图3-1取用,图中ds 为浮趸吃水,ds=0.6m ;τ1—系数,按表1-3.6取用,表中αl 为浮体水下部分纵向轮廓的最大水平尺寸(m ),取αl=45m ;h —取H5%波高,h=1.3m ;Ax 、Ay —浮趸水下横向和纵向阻水面积(m 2)。
图3-1 系数χ值的曲线图表1-3.1 系数τ1/0.6/200.03s d λ==,根据图3-1, 取χ=0.85。
/48.6/20 2.25l αλ==,根据表1-3.6,取τ1=0.48。
χ作用在趸船上的计算波浪力:10.850.48 1.0259.8 1.327146.79kN x x Q ghA χρ==⨯⨯⨯⨯⨯=τ 0.85 1.0259.8 1.3 4.222.83kN y y Q ghA χρ==⨯⨯⨯⨯=风、水流和波浪对浮趸的作用力计算结果见表1-3.7。
波浪力计算公式引言:在海洋工程中,波浪力是一个重要的参数,用于估计波浪对结构物的作用力。
波浪力的计算可以通过波浪力计算公式来实现。
本文将介绍波浪力计算公式的原理和应用,并探讨波浪力计算的相关问题。
一、波浪力计算公式的原理波浪力计算公式是根据波浪理论和结构动力学原理推导出来的。
其基本原理是根据波浪的特性和结构物的几何形状,通过计算波浪作用下的压力和力矩,进而得到波浪力的大小和方向。
二、常用的波浪力计算公式1. Morison公式:Morison公式是最常用的波浪力计算公式之一,适用于波浪作用下的柱状结构物。
该公式基于马克思-赫茨伯格(Morison)定律,考虑了波浪作用下的惯性力和阻力。
其表达式为:F = 0.5 * ρ * Cd * A * (dV/dt) + ρ * Cp * A * V * |V|其中,F为波浪力,ρ为水的密度,Cd和Cp分别为阻力系数和惯性系数,A为结构物的横截面积,V为波浪速度,dV/dt为波浪加速度。
2. Goda公式:Goda公式是一种改进的波浪力计算公式,适用于不规则波浪作用下的结构物。
该公式考虑了波浪的频率谱和结构物的响应特性,能更准确地估计波浪力。
其表达式为:F = ∫∫ (0.5 * ρ * Hs * g * S(f) * A * R(f)^2 * |H(f)|^2 * cos(θ))^0.5 df dθ其中,F为波浪力,ρ为水的密度,Hs为波浪高度,g为重力加速度,S(f)为波浪频率谱密度函数,A为结构物的横截面积,R(f)为结构物的响应函数,H(f)为波浪高度频谱密度函数,θ为波浪方向。
三、波浪力计算的应用波浪力计算公式广泛应用于海洋工程中的结构设计和安全评估。
通过计算波浪力,可以评估结构物的稳定性和安全性,为结构物的设计和施工提供依据。
例如,在海上风电场中,需要计算波浪力来评估风机基础的稳定性;在海岸工程中,需要计算波浪力来评估海堤的稳定性。
四、波浪力计算的相关问题1. 如何确定阻力系数和惯性系数?阻力系数和惯性系数是波浪力计算公式中的重要参数,可以通过试验或数值模拟来确定。
大风浪中船舶顺浪和斜顺浪航行的危险及对策赵月林 (大连海事大学航海学院,辽宁大连,116026)摘要:本文探讨了大风浪中顺浪航行的危险和产生这些危险的机理。
从稳性降低的角度考虑,当船长与波 长接近、波速与船速接近时顺浪航行危险最大;从尾淹和打横的角度,当波长超过两倍船长、波速与船速 接近时顺浪航行危险最大;从横摇的角度,顺浪或者斜顺浪航行较顶浪或者斜顶浪航行更容易发生横谐摇。
根据对这些危险的机理分析,并结合有关的理论研究成果和实际操船实践,提出了各种船舶顺浪和斜顺浪 航行的操纵措施。
关键词:顺浪和斜顺浪航行;稳性降低;尾淹和打横;横谐摇;船舶操纵前言所谓顺浪航行通常是指船尾正后方左右各 15°方向来浪航行的方法,而斜顺浪航行通 常是指正横后大于 45°到正后方 15°范围内来浪航行的方法。
顺浪或斜顺浪航行,可能是 基于航次计划的需要;也可能是基于大风浪操船的需要,例如,在避台操纵中,当船舶位于 台风路径的进路上或者可航半园时,往往需要通过偏尾受风的方式斜顺浪航行驶离台风中 心,又如,在顶浪航行或者滞航中仍然经不起波浪袭击的船舶,可以采用顺浪航行。
然而, 虽然顺浪航行具有降低波浪对船的相对速度从而大大缓解波浪对船舶的袭击,同时船舶在风 浪中可以保持较高的船速,有利于摆脱风浪区等优点,但是顺浪或斜顺浪航行中仍然存在船 舶稳性降低、出现尾淹和打横、横谐摇等危险。
本文试图从探讨产生这些危害的机理出发, 并结合有关理论研究和实际操船实践,针对不同的船舶,提出大风浪中船舶顺浪或斜顺浪航 行的适用条件和操纵注意事项。
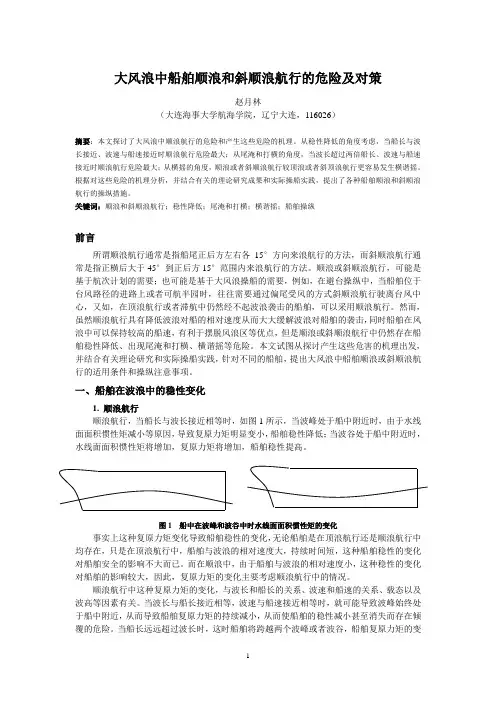
一、船舶在波浪中的稳性变化1. 顺浪航行 顺浪航行,当船长与波长接近相等时,如图 1 所示,当波峰处于船中附近时,由于水线 面面积惯性矩减小等原因,导致复原力矩明显变小,船舶稳性降低;当波谷处于船中附近时, 水线面面积惯性矩将增加,复原力矩将增加,船舶稳性提高。
图 1 船中在波峰和波谷中时水线面面积惯性矩的变化事实上这种复原力矩变化导致船舶稳性的变化,无论船舶是在顶浪航行还是顺浪航行中 均存在,只是在顶浪航行中,船舶与波浪的相对速度大,持续时间短,这种船舶稳性的变化 对船舶安全的影响不大而已。
波浪力计算公式引言:波浪力是指波浪对于物体施加的力量,它是海洋工程中一个重要的参数。
通过对波浪力进行准确的计算,可以帮助我们设计和构建海洋结构物,预测其受力情况,从而确保结构的安全性和稳定性。
本文将介绍波浪力的计算公式及其应用。
一、波浪力的定义波浪力是波浪作用在物体上的力量,它的大小与波浪的高度、周期、波浪传播方向以及物体的形状和尺寸等因素有关。
波浪力的计算是海洋工程中的一个重要问题,也是一项挑战性的任务。
二、波浪力的计算公式波浪力的计算公式可以用以下公式表示:F = 0.5 * ρ * g * H^2 * L其中,F为波浪力,ρ为水的密度,g为重力加速度,H为波浪高度,L为波长。
三、波浪力的应用波浪力的计算在海洋工程中有着广泛的应用。
例如,在设计海洋平台、堤坝、海底管道等结构物时,需要考虑波浪对这些结构物施加的力量。
通过使用波浪力计算公式,可以预测结构物在不同波浪条件下的受力情况,从而指导工程设计和施工过程。
在海洋工程中,波浪力的计算还可以用于预测海洋结构物的疲劳寿命。
由于波浪力是结构物受力的主要因素之一,通过对波浪力进行准确的计算,可以评估结构物的疲劳损伤程度,为结构物的维护和修复提供依据。
波浪力的计算还可以应用于海洋能利用领域。
波浪能和潮汐能是海洋能资源中的两个重要组成部分。
通过准确计算波浪力,可以评估波浪能装置的性能和效益,为海洋能的开发和利用提供科学依据。
四、波浪力计算的挑战和改进尽管波浪力的计算公式已经相对成熟,但在实际应用中仍然存在一些挑战。
例如,波浪力的计算需要准确测量波浪的高度、周期和波长等参数,这对于海洋工程来说是一项技术难题。
另外,波浪力的计算还需要考虑波浪与结构物之间的相互作用,这也增加了计算的复杂性。
为了解决这些问题,研究人员正在不断改进波浪力的计算方法。
一方面,他们致力于改进波浪参数的测量技术,例如利用遥感技术和数值模拟方法来获取更准确的波浪参数。
另一方面,他们还在研究波浪与结构物之间的相互作用机理,以提高波浪力计算的准确性。
一种跨海桥梁基础所受波浪力的计算方法说实话跨海桥梁基础所受波浪力的计算方法这事,我一开始也是瞎摸索。
我先去翻了好多理论书籍,那些书上的公式啊,真的是看起来就让人头疼。
就像一堆乱七八糟缠在一起的线团,根本不知道从哪下手。
我记得有个公式,里面全是各种符号,什么波高啊,波长啊,周期啊之类的,我看了半天才大概明白每个符号的意思,但是真的要把它们放在一起用于计算的时候,就错得一塌糊涂。
后来我想,肯定不能光看理论,得看看实际例子。
我就找了几个已经建成的跨海桥梁工程案例来研究。
我发现他们计算的时候,把实际的海洋环境考虑得特别细致。
比如说,近岸的波浪和远海的波浪特性就很不一样。
我之前就没考虑到这个,就按照一种统一的方式去套公式,结果算出来的数据偏差特别大。
这时候我就恍然大悟,原来得多分情况去考虑啊。
那怎么把这些不同情况考虑进去呢?我又从不同的工程论文里去找方法。
我发现一些靠谱的方法是先把波浪进行分类,像风浪、涌浪之类的。
这就好比把一群羊先分成大羊和小羊,这样就比较好管理计算了。
然后针对每一类波浪呢,再去确定它的基本参数,这个过程就像是给每个分组的羊都做个标记一样。
再说说关于算法的改进吧。
有一次我按照传统的计算方式得出了结果,然后跟另一个经验丰富的工程师朋友交流。
他一看就说我少考虑了一些波浪之间的相互作用。
就好像我们在计算一个队伍里人数的时候,我只算了每个人,却忽略了他们可能两两拉手或者小组配合的情况。
从那以后我就明白,在计算波浪力的时候,波与波之间的非线性关系也要考虑到。
从那之后我又进行了大量的实验和重新计算,在这个过程中不断调整参数,这个时候就像是在慢慢调整一个刚刚搭起来还摇摇晃晃的积木塔一样,直到最后得到一个相对合理的结果。
虽然说现在我算是有了点门道,但是我知道还有很多复杂的情况可能还没考虑周全,像海底地形突然变化的时候,对波浪力的影响应该怎么精准计算,我还得继续探索下去。
不过大家要是也在做这个工作的话,一定不要怕麻烦,要细致地去分析海洋环境,多借鉴成功的案例,这样才能让自己的计算更准确一些。
Option ExplicitDim L1 As Single, L2 As Single, t As Single, d!, k!, kd!, thkd!, H!, D1!Dim CD As Single, CM As Single, l As Single, Ko As SingleDim Fhdmax As Single, Fhlmax As Single, Mhdmax As Single, Mhlmax!, Fhmax!, Mhmax!Dim 0 As SigleConst Pi = 3.141592653Coist G = 9.8Con st Y = 1025Private Sub Commaid1_Click()Dim r As IitegerDo While TrueL1 = Val(I iputBox(" 请输入波长L1:", "求解设计波长:", "100"))t = Val(IiputBox(" 请输入设计波周期T:", "请输入", "6"))d = Val(I iputBox(" 请输入设计水深d:", "请输入", "20"))If L1 <= 0 Their = MsgBox("请输入一个正数!", 5,"输入错误”)If r = 2 TheiEidEid IfElseExit DoEid IfLoopk = 2 * Pi / L1kd = k * dthkd = (Exp(kd) - Exp(-kd)) / (Exp(kd) + Exp(-kd))L2 = G * (t A 2) * thkd / (2 * Pi)Do Uitil Abs(L2 - L1) < 0.001L1 = L2k = 2 * Pi / L1kd = k * dthkd = (Exp(kd) - Exp(-kd)) / (Exp(kd) + Exp(-kd))L2 = G * (t A 2) * thkd / (2 * Pi)LoopPriit "设计波长是:"; L2Priit "波数:"; Format$(k, "0.0000")Eid SubPrivate Sub Commaid2_Click()EidEid SubPrivate Sub Commaid3_Click()H = Val(IiputBox(" 请输入设计波高H:", "请输入", "3"))D1 = Val(IiputBox(" 请输入桩柱直径D1:", "请输入", "2"))l = Val(IiputBox(" 请输入桩柱间距l:", "请输入", "15"))If d / L2 < 0.5 ThenPrintPrint "相对水深d/L2:"; d / L2Print " 采用线性波理论计算:"ElseMsgBox " 重新选择计算理论"End IfPrint "波陡:"; H / L2Print "相对柱径:"; D1 / L2If D1 / L2 < 0.2 ThenPrint " 属于小直径桩柱"ElsePrint " 属于大直径桩柱"End IfCD = Val(InputBox(" 请输入拖曳力系数:", "请输入", "1.0"))CM = Val(InputBox(" 请输入质量系数:", "请输入", "2.0")) PrintPrint "选用拖曳力系数:"; CDPrint "选用质量系数:"; CMDim LD As SingleLD = l / D1Print " 桩柱相对间距:"; LDPrint "群桩系数Ko:";If LD > 4 ThenKo = 1Print KoElseIf LD < 4 And LD > 3 ThenKo = 1.25Print KoElseIf LD < 2 ThenKo = 1.5Print KoEnd IfEnd SubPrivate Sub Command4_Click()Dim K1 As Single, K2 As Single, K3 As Single, K4 As SingleDim e As Single, 0 o As SingleK1 = (2 * k * (d + H / 2) + sh(2 * k * (d + H / 2))) / (8 * sh(2 * k * d))Fhdmax = CD * 丫* G * D1 * (H A2) * K1 / 2PrintPrint "K1 值:"; Format$(K1, "0.0000")Print "单桩柱最大水平拖曳力Fhdmax:"; FhdmaxK2 = th(k * d)Fhlmax = CM * 丫* G * Pi * (D1 A 2) * H * K2 / 8PrintPrint "K2 值:"; Format$(K2, "0.0000")Print "单桩柱最大水平惯性力Fhlmax:"; FhlmaxK3 = (2 * (k A 2) * (d + H / 2) A 2 + 2 * k * (d + H / 2) * sh(2 * k * (d + H / 2)) - ch(2 * k * (d + H / 2)) + 1) / (32 * sh(2 * k * d))Mhdmax = CD * 丫* G * D1 * (H A 2) * L2 * K3 / (2 * Pi)PrintPrint "K3 值:"; Format$(K3, "0.0000")Print "单桩柱最大水平拖曳力矩Mhdmax:"; MhdmaxK4 = (k * d * sh(k * d) - ch(k * d) + 1) / ch(k * d)Mhlmax = CM * 丫* G * (D1 A 2) * H * L2 * K4 / 16PrintPrint "K4 值:"; Format$(K4, "0.0000")Print "单桩柱最大水平惯性力矩Mhlmax:"; MhlmaxIf Fhlmax >= 2 * Fhdmax ThenFhmax = Fhlmax0 o = 90ElseIf Fhlmax < 2 * Fhdmax ThenFhmax = Fhdmax * ((1 + (Fhlmax / Fhdmax) A 2) / 4) 0 o = arcsin(Fhlmax / (2 * Fhdmax)) End If PrintPrint "单桩柱最大水平波力Fhmax:"; FhmaxIf Mhlmax >= 2 * Mhdmax ThenMhmax = MhlmaxElseIf Mhlmax < 2 * Mhdmax Then Mhmax = Mhdmax * ((1 + (Mhlmax / Mhdmax) A 2) / 4) End IfPrintPrint "单桩柱最大水平波力矩Mhmax:"; MhmaxPrint "最大水平波力和最大水平波力矩的相位0 o:"; 0 oe = Mhmax / FhmaxPrintPrint "最大水平波力作用点离海底的距离e:"; eEnd SubPublic Function sh(n) As Singlesh = (Exp(n) - Exp(-n)) / 2End FunctionPublic Function ch(n) As Singlech = (Exp(n) + Exp(-n)) / 2End FunctionPublic Function th(n) As Singleth = (Exp(n) - Exp(-n)) / (Exp(n) + Exp(-n))End FunctionPublic Function arcsin(n) As Single arcsin = Atn(n / Sqr(-n * n + 1))End FunctionPublic Function FH( 0 ) As SingleFH = Fhdmax * Cos( 0 ) * Abs(Cos( 0 )) + Fhlmax * Sin( 0)End FunctionPublic Function MH( 0 ) As SingleMH = Mhdmax * Cos( 0 ) * Abs(Cos( 0 )) + Mhlmax * Sin( 0)End FunctionPrivate Sub Command5_Click()Dim i As Integer桌面不同相位水平波力.txt" For Output As #1 Print #1, Tab(8);"相位角0 ”; Spc(3); "cos 0 ”; Spc(3); "cos 0 |cos B |"; Spc(3); "sin 0 ' Spc(3); "Fhdmaxcos 0 |cos 0 |"; Spc(3); "Fhlmaxsin 0 "; Spc(6); "FH"For i = 0 To 180 Step 150 = i * Pi / 180Print #1, Tab(10); i; Tab(20); Format$(Cos( 0 ), "0.0000");Print #1, Tab(30); Format$(Cos( 0 ) * Abs))(,C"o0s.0(0000");Print #1, Tab(40); Format$(Sin( 0 ), "0.0000");Print #1, Tab(55); Format(Fhdmax * Cos( 0 ) * Abs(Cos( 0 )), "0.00");Print #1, Tab(70); Format(Fhlmax * Sin( 0 ), "0.00");Print #1, Tab(85); Format(FH( 0 ), "0.00")Next iClose #1End SubPrivate Sub Command6_Click()Dim i As Integer桌面不同相位水平波力矩.txt" For Output As #2 Print #2, Tab(8); "相位角0 "; Spc(3); "cos0 "; Spc(3); "cos0 |cos0 |"; Spc(3); "sin0 Spc(3); "Fhdmaxcos 0 |cos0 |"; Spc(3); "Mhlmaxsin 0 "; Spc(6); "MH"For i = 0 To 180 Step 150 = i * Pi / 180Print #2, Tab(10); i; Tab(20); Format$(Cos( 0 ), "0.0000");Print #2, Tab(30); Format$(Cos( 0 ) * Abs(Cos( 0 )), "0.0000");Print #2, Tab(40); Format$ (Sin( 0 ), "0.0000");Print #2, Tab(55); Format(Mhdmax * Cos( 0 ) * Abs(Cos( 0 )), "0.00");Print #2, Tab(70); Format(Mhlmax * Sin( 0 ), "0.00");Print #2, Tab(85); Format(MH( 0 ), "0.00")Next iClose #2End SubPrivate Sub Command7_Click()Dim y As SingleDim 刀H As SingleDim i As IntegerDim t As Single, m As Integery = l * 360 / L2PrintPrint "前后两桩柱的波浪位相差y :t = 0For i = 0 To 180 - y刀H = FH(i) + FH(i + y )If t < 刀H Thent =刀Hm = iEnd IfNext iPrint "发生最大水平合波力的相位:"; m Print "前后两桩柱的最大水平合波力为:End SubPrivate Sub Command8_Click()ClsEnd SubPrivate Sub Command9_Click()Dim y As SingleDim 刀M As SingleDim i As IntegerDim t As Single, m As Integery = l * 360 / L2t = 0For i = 0 To 180 - y刀M = MH(i) + MH(i + y )If t < 刀M Thent =刀Mm = iEnd IfNext iPrintPrint "发生最大水平合波力矩的相位:";Print "前后两桩柱的最大水平合波力矩为:End Sub m "; t海洋环境作业计算结果:nl■ □ X---------- --------------- • --------------0.114254.99825计嶷长|2g : 0,9795单癡果縣平惯性加h 歸:92730.2 A 0.1807单榊撮大术平拖曳力矩》湎:2860013 1.4395郸椎最大水平惯性力矩IhlmH : 1192875ip : 98J8495 应:19 粧力为:75446.48单竝最尢水理加血吆92T30.2 瓣删瓢略9。
微段时间波浪力计算法在柔性浮式防撞系统上的应用于伟;陈徐均;施杰;刘俊谊【摘要】In order to study the wave force for effect of The Flexible Floating Collision-Prevention System (FFSCS), step by step computational methodof the wave force is presented in this paper, numerical simulation is carried out for the collision process. Based on potential flow theory, theansys_aqwa software is used to obtain the wave forces of different incident angles and different phase angles. In the process of simulation of the ship collision, the calculation of the wave force is more complex. This paper use the method, which deal with different wave incident angles and different wave phase angles at Micro times, to calculate continuously. Comparative analysis of the results show that, the effect of different waves for the collision process is different. In the collision process, the influence of the wave force can’t be neglected.%为了研究波浪力对于柔性浮式防撞系统拦阻效能的影响,本文提出了分步处理波浪力的方法,进行了撞击过程的模拟计算研究。
波浪力的计算波浪力的计算需要两方面理论的支持:波浪运动理论及波浪荷载计算理论。
前者研究波浪的运动,后者在已知波浪运动的前提下计算波浪对水中物体的作用。
几种常用的波浪普: 1.P-M 谱Pierson 和Moskowitz适用于无限风速发在的波浪普。
国际船模水池会议(ITTC)推荐采用这一形式的波,故也称为ITTC波谱。
JONSWAP(Joint north sea wave project).是一种频谱。
3.应力范围的长期分布模型:1.离散型模型,2.分段连续型模型,3.连续模型。
1. 离散模型:用Hs作为波高,Tz为波浪周期,定义一个余弦波。
然后用规则波理论计算作用在结构上的波浪力。
并用准静定的方法计算结构呢I的应力。
缺陷:没有将波浪作为一个随机过程来处理。
每一海况的应力范围只有一个确的数值。
因此又称为确定性模型。
2.分段连续型模型每一短期海况中,交变应力过程是一个均值为0的平稳正态过程。
综合所有海况中应力范围的短期分布,并得出各个海况出现的疲劳,就得到应力范围的长期分布,它的形式是分段连续的。
应力范围的两种短期分布模型:1.Rayleigh分布和Rice分布。
在某一海况中交变应力均值为。
应力峰值服从Rayleigh分布。
通过计算得出应力范围也服从Rayleigh分布。
3.在船舶及海洋工程结构疲劳可靠性分析中,希望应力范围的长期分布能用一个连续的分布函数来描述。
这就是应力范围长期分布的连续模型.最常用的就是Weibull分布。
4.有义波高:(significant wave height)所有波浪中波高最大的三分之一波浪的平均高度。
用Hs表示。
5.Stokes五阶波给出了波陡的量度(H/L)H/L越大,波就越陡。
当波高与波长的比值大到一定程度时,波会破碎。
6.波速=波长与频率的乘积C=λ/T或者C=λf,其中f是频率。
或者T=2π/ω7.圆频率1.圆频率即2π秒内振动的次数,又叫角频率,和角速度的ω没有任何关系。
海浪测量的一种新方法
冯铁城;吴善勤;周宏;雷振华
【期刊名称】《上海交通大学学报》
【年(卷),期】1990(24)4
【摘要】本文根据时间序列分析和参数识别理论,提出一种测量海浪的新方法.它不需要浪高仪,仅由船舶横摇运动记录曲线来估算海浪的统计值.这种动态海浪预测方法便于船舶航行中实时测量.通过对模型试验结果的对比分析和实船横摇记录的离线计算表明,本文方法是可行的.
【总页数】6页(P26-31)
【关键词】海浪;测量方法;时间序列分析
【作者】冯铁城;吴善勤;周宏;雷振华
【作者单位】上海交通大学船舶与海洋工程系
【正文语种】中文
【中图分类】P714.1
【相关文献】
1.Photoshop软件在园艺试验测量中的应用——一种测量葡萄花蕾大小的新方法[J], 齐永顺;王同坤;张京政;程瑞月;张会龙
2.一种获取海浪谱的新方法 [J], 胡燕红
3.三坐标测量机测量螺纹中径的一种新方法 [J], 刘浩;党养正;李文娟
4.星载SAR海浪遥感中波向确定的一种新方法 [J], 杨劲松;黄韦艮;周长宝
5.一种适于海浪测量的立体摄影物理模型 [J], 王英霞;姜文正;乔方利;陈思宇因版权原因,仅展示原文概要,查看原文内容请购买。
波浪力及波浪力矩计算
黄伟;于潇
【期刊名称】《工程与建设》
【年(卷),期】2022(36)1
【摘要】随着社会的进步,传统计算手段已不能满足设计需求,需要寻找新的软件来辅助设计。
本文利用Flow3D软件对港口设计算例中重力式码头所受波浪力和力矩进行了模拟,并与理论计算结果进行对比,发现静水面以上二者基本重合,静水面以下,模拟值要稍小于算例值,这是由于理论计算中采用的简化方法,只计算了几个关键点,然后进行连线,而在软件中,波浪力是呈非线性分布的,因此会有差别,但结果总体令人满意。
今后需通过大量项目进行验证总结,目前可作为一种新的手段对设计进行验证。
【总页数】4页(P230-233)
【作者】黄伟;于潇
【作者单位】山东港通工程管理咨询有限公司;威海市建筑工程服务中心
【正文语种】中文
【中图分类】TV139.24
【相关文献】
1.非线性波浪荷载作用下裸置管道波浪力计算
2.有顶板开孔沉箱水平波浪力及力矩的计算
3.新波浪理论在系留船舶二阶波浪力计算机中的应用研究
4.波浪作用下桩基承台结构的波浪力计算
5.非线性波浪作用下埋置管道上波浪力简化计算
因版权原因,仅展示原文概要,查看原文内容请购买。
外输浮筒水动力计算方法比较
康庄;徐祥;付森;张橙
【期刊名称】《船海工程》
【年(卷),期】2017(046)006
【摘要】为准确预报外输浮筒的水动力性能,分别对基于辐射/绕射理论和细长体理论的水动力计算方法进行改进,并给出了相应的理论计算模型.提出一种莫里森单元+碟形单元的组合模型以计算浮筒主体及其裙板的黏性载荷.设计模型试验对2种计算方法进行验证对比,发现2种方法的计算结果与试验结果在运动幅值和总体趋势上基本保持一致,验证了外输浮筒水动力计算模型的正确性,并且基于辐射/绕射理论的计算方法精度更高.
【总页数】6页(P116-121)
【作者】康庄;徐祥;付森;张橙
【作者单位】哈尔滨工程大学深海工程技术研究中心,哈尔滨150001;哈尔滨工程大学深海工程技术研究中心,哈尔滨150001;哈尔滨工程大学深海工程技术研究中心,哈尔滨150001;哈尔滨工程大学深海工程技术研究中心,哈尔滨150001
【正文语种】中文
【中图分类】U661.43
【相关文献】
1.海洋平台外输计量系统的检定方法探讨 [J], 刘宇;王惠平
2.西非深水外输浮筒系泊系统设计分析 [J], 李黎霞;王文伟;梁姝婷;臧鹏玉;吴凯锋
3.降低天然气外输计量误差方法的分析 [J], 徐敏敏
4.催化裂化再生器自然水循环外取热系统水动力计算方法 [J], 成枫;伦学良
5.一种控制长距离外输海管段塞流的方法 [J], 张伟宁
因版权原因,仅展示原文概要,查看原文内容请购买。
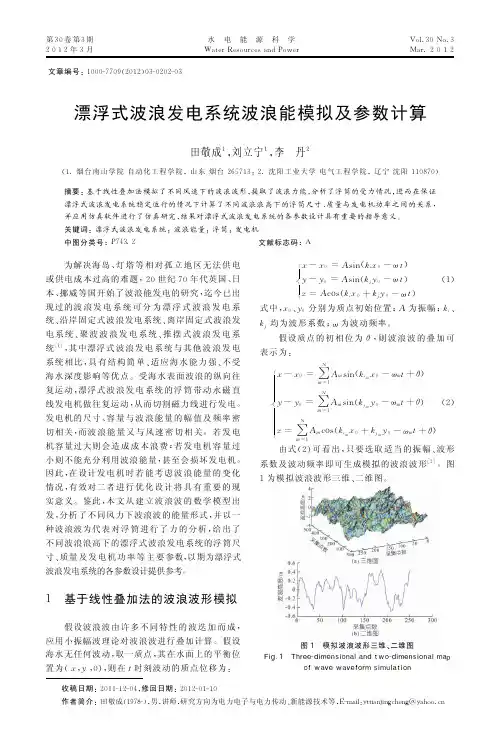
浮筒式波浪发电平台性能分析研究吕沁;李德堂;金豁然;胡星辰;魏卓;赵春慧【摘要】波浪能发电浮筒的研究关键是实现波浪能发电装置的能量转换最大化。
根据“海院1号”浮筒式波浪发电平台的运动特点,提出了一种预测浮子垂荡运动的时域方法。
同时,通过MATLAB模拟计算,获得最佳系统压力和平均传输功率。
经海测试验验证了数值模拟的正确性,为波浪发电平台浮筒设计优化提供依据,具有工程应用价值。
%The key technology of wave power generation buoy is to realize the maximum energy transformation of the wave power generation device. A time-domain method for predicting the vertical motion of the buoy is proposed based on the motion characteristics of the buoy-type wave power generation platform Haiyuan 1. Meanwhile, the optimal system pressure and the average delivered power are obtained through MATLAB simulation, and the numerical simulation is verified correct through sea trial. This study provides the basis for the design optimization of wave power generation buoy, and has the practical engineering significance.【期刊名称】《船舶与海洋工程》【年(卷),期】2016(032)004【总页数】6页(P40-45)【关键词】波浪能;浮筒;MATLAB;平均输出功率;取能效率【作者】吕沁;李德堂;金豁然;胡星辰;魏卓;赵春慧【作者单位】浙江海洋大学船舶与海洋工程学院,浙江舟山 316000; 浙江省近海海洋工程技术重点实验室,浙江舟山316000;浙江海洋大学船舶与海洋工程学院,浙江舟山 316000; 浙江省近海海洋工程技术重点实验室,浙江舟山 316000;浙江海洋大学船舶与海洋工程学院,浙江舟山 316000; 浙江省近海海洋工程技术重点实验室,浙江舟山 316000;浙江海洋大学船舶与海洋工程学院,浙江舟山 316000; 浙江省近海海洋工程技术重点实验室,浙江舟山 316000;浙江海洋大学船舶与海洋工程学院,浙江舟山 316000; 浙江省近海海洋工程技术重点实验室,浙江舟山316000;浙江海洋大学船舶与海洋工程学院,浙江舟山 316000; 浙江省近海海洋工程技术重点实验室,浙江舟山 316000【正文语种】中文【中图分类】TK79近年来,随着社会的不断发展,能源需求量快速增加,化石能源短缺、环境污染等问题逐渐成为世界性问题[1]。