实验三 红外测距原理实验
- 格式:docx
- 大小:104.45 KB
- 文档页数:3
#### 一、实训背景随着科技的飞速发展,红外测距技术在各个领域得到了广泛应用。
红外测距传感器作为一种非接触式测距设备,具有精度高、响应速度快、抗干扰能力强等特点,在工业自动化、机器人导航、智能交通等领域具有广泛的应用前景。
为了更好地掌握红外测距传感器的工作原理和应用,我们开展了本次实训。
#### 二、实训目的1. 理解红外测距传感器的原理和特性;2. 掌握红外测距电路的制作与调试方法;3. 熟悉红外测距传感器的应用场景和编程技巧;4. 培养动手实践能力和团队合作精神。
#### 三、实训内容1. 红外测距传感器原理及特性红外测距传感器通过发射红外线,测量红外线从发射到反射回来的时间,从而计算出与被测物体的距离。
其工作原理如下:(1)红外发射管发射特定波长的红外线;(2)红外线照射到被测物体上,部分红外线被反射回来;(3)红外接收管接收反射回来的红外线,并将信号传输给处理电路;(4)处理电路根据红外线发射和接收的时间差计算出距离。
红外测距传感器的特性包括:- 测量范围广:通常可测量0.1m至数十米距离;- 响应速度快:可达到毫秒级;- 抗干扰能力强:对环境光线、湿度等影响较小;- 成本低:结构简单,易于制作。
2. 红外测距电路制作与调试本次实训采用红外测距传感器LDM301进行电路制作与调试。
具体步骤如下:(1)电路元件准备:LDM301红外测距传感器、单片机(如Arduino)、电源模块、电阻、电容等;(2)电路连接:将红外测距传感器、单片机、电源模块等按照电路图连接;(3)调试:通过编程调整红外测距传感器的参数,使电路稳定工作;(4)测试:在实验室环境中测试红外测距传感器的性能,包括测量范围、响应速度、抗干扰能力等。
3. 红外测距传感器应用本次实训中,我们将红外测距传感器应用于以下场景:(1)避障机器人:通过红外测距传感器检测前方障碍物距离,控制机器人避开障碍物;(2)智能家居:红外测距传感器可应用于智能门锁、窗帘自动关闭等场景;(3)工业自动化:红外测距传感器可用于生产线上的物料检测、设备定位等。
利用红外发射接收传感器进行距离检测一、实验要求对红外得发射接收作进一步得探讨。
红外可以用来测距离,理解红外测距得基本原理,能够掌握简单得比例控制方法,以及编程。
掌握定时/计数器得使用。
对循迹效果作分析。
二、实验概要本实验将探讨红外测距得内容.利用红外检测器得内置电子滤波功能,调节发射红外得载波频率,而检测器对不同频率得信号有不同得“敏感度”,这样,就能大概得知道距离.1。
测试红外得扫描频率.记录红外发射接收得距离.2。
尾随小车。
让一个小车跟着另一个小车前行。
要将前后距离控制在一定得范围内,若前后距离较大,后面跟随得小车应该加速,跟上去;若距离小于预定值,则减速。
3.跟踪黑色条纹带.红外测距得另一种形式得应用。
也能让小车实现循迹功能。
三、实验内容红外技术发展到现在,已经为大家所熟知,这种技术已经在现代科技、国防与工农业等领域获得了广泛得应用。
红外传感系统就是用红外线为介质得测量系统,按照功能能够分成五类:(1)辐射计,用于辐射与光谱测量;(2)搜索与跟踪系统,用于搜索与跟踪红外目标,确定其空间位置并对它得运动进行跟踪;(3)热成像系统,可产生整个目标红外辐射得分布图像;(4)红外测距与通信系统;(5)混合系统,就是指以上各类系统中得两个或者多个得组合。
红外传感器根据探测机理可分成为:光子探测器(基于光电效应)与热探测器(基于热效应)。
本次试验将尝试用红外来测距.1。
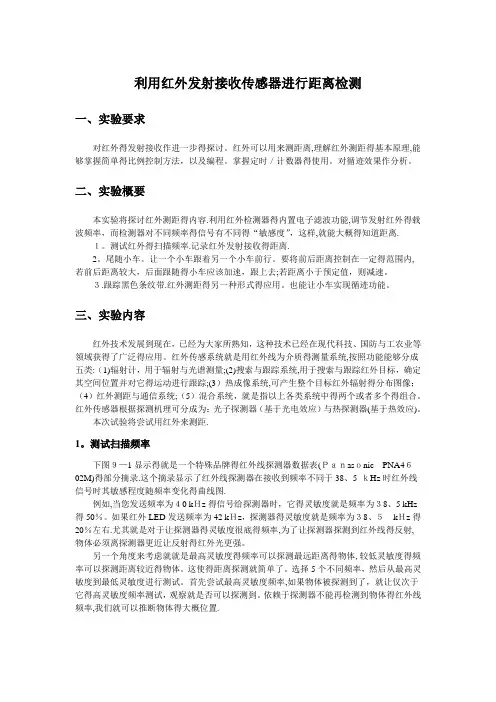
测试扫描频率下图9—1显示得就是一个特殊品牌得红外线探测器数据表(Panasonic PNA4602M)得部分摘录.这个摘录显示了红外线探测器在接收到频率不同于38、5 kHz时红外线信号时其敏感程度随频率变化得曲线图.例如,当您发送频率为40 kHz得信号给探测器时,它得灵敏度就是频率为38、5 kHz 得50%。
如果红外LED发送频率为42 kHz,探测器得灵敏度就是频率为38、5kHz得20%左右.尤其就是对于让探测器得灵敏度很底得频率,为了让探测器探测到红外线得反射,物体必须离探测器更近让反射得红外光更强。
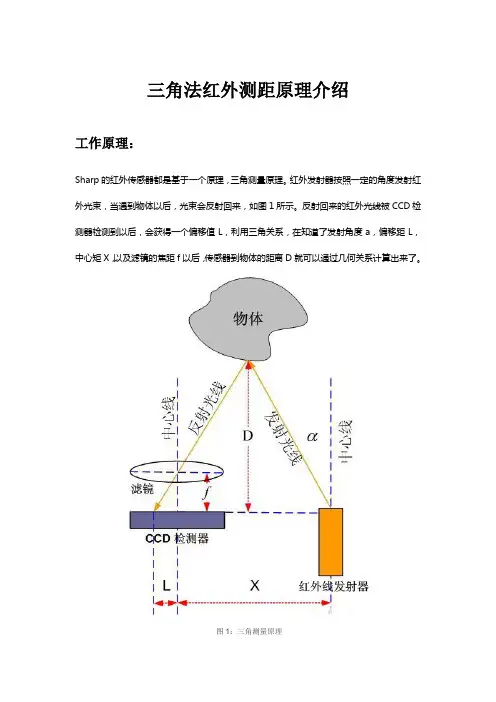
三角法红外测距原理介绍工作原理:Sharp的红外传感器都是基于一个原理,三角测量原理。
红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。
反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。
图1:三角测量原理可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。
当物体距离D很大时,L值就会很小。
这时CCD检测器能否分辨得出这个很小的L 值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。
要检测越是远的物体,CCD的分辨率要求就越高。
非线性输出:Sharp GS2XX系列的传感器的输出是非线性的。
没个型号的输出曲线都不同。
所以,在实际使用前,最好能对所使用的传感器进行一下校正。
对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。
下图是典型的Sharp GP2D12的输出曲线图。
图2:Sharp GP2D12输出曲线从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。
但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。
当然了,解决这个方法也不是没有,这里有个小技巧。
只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。
如图3所示:图3:可以避免探测误差的安装图示。
第1篇一、实验目的1. 了解红外遥控的基本原理和组成。
2. 掌握红外遥控信号的发射和接收技术。
3. 评估红外遥控系统的性能,包括遥控距离、角度和抗干扰能力。
4. 分析实验过程中遇到的问题,并提出相应的解决方案。
二、实验原理红外遥控技术是一种无线通信技术,通过发射端发送红外信号,接收端接收并解析红外信号,从而实现对设备的控制。
红外遥控系统主要由发射端、传输介质和接收端组成。
三、实验器材1. 红外遥控器2. 红外接收模块3. 逻辑分析仪4. 万用表5. 电源6. 调试工具四、实验步骤1. 搭建实验平台:将红外遥控器和红外接收模块连接到逻辑分析仪,并将逻辑分析仪与电脑连接,以便实时观察和分析信号。
2. 测试遥控距离:在实验室内,保持红外遥控器和红外接收模块之间距离不变,逐步增加距离,记录不同距离下的遥控效果。
3. 测试遥控角度:在实验室内,保持红外遥控器和红外接收模块之间距离不变,改变红外遥控器与红外接收模块之间的角度,记录不同角度下的遥控效果。
4. 测试抗干扰能力:在实验室内,向红外遥控器和红外接收模块之间添加干扰信号,观察红外遥控系统的抗干扰能力。
五、实验结果与分析1. 遥控距离测试:在实验过程中,当红外遥控器和红外接收模块之间距离为5米时,遥控效果良好;当距离增加到10米时,遥控效果有所下降;当距离增加到15米时,遥控效果基本失效。
这表明红外遥控系统的遥控距离与发射端和接收端之间的距离有关,距离越远,遥控效果越差。
2. 遥控角度测试:在实验过程中,当红外遥控器和红外接收模块之间距离为5米时,在正前方角度范围内,遥控效果良好;当角度增加到45度时,遥控效果有所下降;当角度增加到90度时,遥控效果基本失效。
这表明红外遥控系统的遥控角度与发射端和接收端之间的角度有关,角度越大,遥控效果越差。
3. 抗干扰能力测试:在实验过程中,向红外遥控器和红外接收模块之间添加干扰信号,发现当干扰信号强度较高时,红外遥控系统的抗干扰能力较差,容易导致遥控失效。
一、实训目的本次实训旨在让学生了解红外传感器的原理、结构、工作特性,并掌握红外传感器的测试方法。
通过实训,使学生能够熟练使用红外传感器进行实际测量,并具备分析测量结果、解决实际问题的能力。
二、实训内容1. 红外传感器原理与结构红外传感器是一种利用红外线特性进行测量的传感器。
其工作原理是:物体在辐射红外线时,红外传感器通过接收这些红外线并将其转换为电信号,从而实现对物体状态的测量。
红外传感器的结构主要由光学系统、探测器、信号调理电路和显示系统等组成。
其中,光学系统负责将红外线聚焦到探测器上;探测器将红外线转换为电信号;信号调理电路对电信号进行处理;显示系统将处理后的信号显示出来。
2. 红外传感器的测试方法(1)基本测试1)外观检查:检查红外传感器的外观是否有损坏、变形等现象。
2)连接检查:检查红外传感器的连接线是否完好,接触是否牢固。
3)工作电压测试:使用万用表测量红外传感器的工作电压,确保其符合规格要求。
(2)性能测试1)灵敏度测试:将红外传感器置于一定距离处,使用红外辐射源照射传感器,观察传感器输出信号的幅度。
通过改变照射强度,绘制灵敏度曲线,分析传感器的灵敏度。
2)响应时间测试:将红外传感器置于一定距离处,使用红外辐射源照射传感器,记录传感器输出信号从低电平到高电平的时间,以及从高电平到低电平的时间。
通过比较不同传感器的响应时间,分析其性能。
3)抗干扰能力测试:在红外传感器附近加入干扰源,如振动、射频等,观察传感器输出信号的变化,分析其抗干扰能力。
4)温度特性测试:将红外传感器置于不同温度环境下,观察传感器输出信号的变化,分析其温度特性。
5)距离特性测试:将红外传感器置于不同距离处,观察传感器输出信号的变化,分析其距离特性。
3. 实训项目本次实训选取了以下项目进行测试:(1)热释电红外传感器测试(2)红外雨量传感器测试(3)红外测距传感器测试三、实训过程1. 准备工作实训前,准备好所需的仪器设备,包括红外传感器、红外辐射源、万用表、信号发生器等。
三角法红外测距原理
三角法红外测距原理是一种常用的测量物体距离的方法。
它基于三角形的几何关系,通过测量物体的角度和距离,可以计算出物体到测量设备的准确距离。
在红外测距装置中,通常包含一个红外发射器和一个红外接收器。
发射器会发出一束红外光束,该光束会经过物体,并被物体反射回来。
接收器会接收到被反射回的红外光束。
为了计算物体到测距装置的距离,我们需要测量物体的角度和红外光束的发射角度。
通过测量发射器和接收器之间的角度差,以及物体与测距装置之间的角度,我们可以使用三角函数来计算出物体到测距装置的距离。
具体而言,我们可以使用正切函数来计算距离。
设发射器到物体的距离为a,物体到接收器的距离为b,物体到测距装置的
距离为c,测得发射器和接收器之间的角度差为θ,则有如下
关系:
tan(θ) = a / b
我们可以通过测量发射器和接收器之间的距离和角度差,来计算出a和b的值,从而得到c的值。
三角法红外测距原理适用于许多领域,如自动驾驶、室内导航、安防监控等。
它具有测量精度高、响应速度快的特点,并且可以在不同光照条件下进行测量。
红外测距的原理
红外测距是一种利用红外线来测量物体与测距仪之间距离的技术。
其原理是基于红外线的特性以及光的反射原理。
红外线是一种较长波长的电磁辐射,它位于可见光和微波之间,无法被人眼所察觉。
红外线能够被物体吸收、反射和传导。
测距仪通过发送红外线信号并接收反射回来的信号来确定物体与测距仪之间的距离。
在红外测距中,测距仪会通过红外发射器产生一束红外线。
这束红外线会以一定的速度传播,并且当遇到物体时会被物体吸收或反射。
如果红外线被吸收,那么测距仪会接收不到反馈信号,无法测量距离。
但如果红外线被物体反射回来,测距仪可以接收到这个反射信号,并且根据信号的强度和延迟时间来计算物体与测距仪之间的距离。
测距仪中的接收器通常采用红外光敏元件,例如光电二极管或光敏电阻。
这些元件可以将接收到的红外信号转化为电信号。
测距仪还会通过控制电路处理接收到的信号,并且根据信号的特征来计算距离。
红外测距的精确度受到多种因素的影响,例如测距仪和物体之间的相对位置、红外线的发射功率和接收灵敏度等。
此外,环境条件也可能会对测距结果产生干扰,例如其他光源的存在或光的反射等。
总的来说,红外测距通过发射和接收红外线信号来测量物体与
测距仪之间的距离。
它是一种常用的非接触式测距技术,被广泛应用于工业、安防、机器人等领域。
红外测距传感器的原理与设计摘要:现代科学技术的发展,进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。
为了实现物体近距离、高精度的无线测量,我采用红外发射接收模块作为距离传感器,单片机作为处理器,编写A/D转换、显示以及与PC机的通信程序,开发了一套便推式的红外距离测量系统,系统可以高精度的实时显示所测的距离,并且可以将距离量通过串口发送到PC机显示处理、本系统结构简单可靠、体积小、测量精度高、方便使用,另外本系统形成了一套完善的软硬件开发平台,可以进行扩展、移植和做进一步的开发。
关键词:红外测距;68HC11E1;A/D转换;Principle and design of the infrared distance sensor Abstract:The development of modern science and technology, into many new areas, has a laser The development of modern science and technology, into many new areas, has a laser range finder in the ranging aspects, ranging of microwave radar, ultrasonic ranging and infrared ranging. In order to achieve the objects at close range, high-precision wireless measurement, I used the infrared transmitter receiver module as the distance sensor, microcontroller as the processor to write the A / D conversion, display and communication with the PC program, developed a will to push infrared distance measurement systems, high-precision real-time system can display the measured distance, and distance measuring can be sent through the serial port to a PC display processing, the system structure is simple and reliable, small size, high accuracy, ease of use, while this system the formation of a complete set of hardware and software development platform can be extended, transplantation, and further development.Key words:Infrared distance; 68HC11E1; A / D conversion;一、绪论 (1)1.1设计背景 (1)1.2红外线简介 (1)1.3红外线传感器概述 (2)1.3.1 红外线传感器系统介绍 (2)1.3.2 红外线传感器的分类 (3)1.3.3 红外线传感器的应用 (6)二、红外测距的方法和原理 (7)2.1几种红外测距原理及选择 (7)2.1.1 相位测距原理 (7)2.1.2 PSD测距原理 (9)2.1.3 带运动机构的双象比较法原理 (9)2.1.4 时间差测距法原理 (9)2.1.5 反射能量法原理 (9)2.1.6 红外测距原理的选择 (9)2.2红外测距系统的工作原理 (9)三、红外测距的基本结构及系统框图 (11)3.1红外测距的过程 (11)3.2红外测距系统框图 (11)3.3主要元件分析 (12)3.3.1 红外线发射器件 (12)3.3.2红外线光敏二极管 (13)四、红外测距硬件电路设计 (14)4.1单片机最小系统 (14)4.2红外发射电路设计 (16)4.3红外接收放大电路设计 (17)4.4电源电路 (19)4.5数码管显示电路 (21)五、软件模块设计 (23)5.1程序设计步骤 (23)5.2软件设计框图: (23)5.3红外测距A/D转换程序 (24)六、测量精度分析 (26)[参考文献] (27)附录 (28)致谢 (28)1.1 设计背景在基础学科研究中,传感器具有突出的地位。
红外线测距原理随着现代科技的不断发展,人类对于测距的需求也日益增长。
红外线测距原理,是一种常见的测距方法,它可以准确地测量物体与测距仪之间的距离。
那么,红外线测距原理是如何实现的呢?下面,就让我们逐一了解。
一、发射红外线红外线测距的第一步,就是发射红外线。
红外线是一种波长较长的电磁波,它的频率介于可见光和微波之间。
发射红外线可以使用红外线发射器,这种器件可以向物体发射一定波长的红外线。
二、轻微偏转红外线发出后,会对物体表面产生反射。
当红外线照射到物体表面时,会轻微地偏转。
这种偏转是与物体的形状、表面质量和材质等因素相关的。
因此,当物体表面质量相同时,它们偏转的方向和程度也应该相同。
三、接收红外线为了接收物体反射回来的红外线,需要使用被动式红外线接收器。
这种器件比较敏感,可以通过检测红外线的强度和频率来确定物体反射回来的红外线信号。
四、处理信号由于物体距离测距仪的远近不同,因此它们反射回来的红外线信号也不同。
因此,需要通过处理红外线信号的强度和频率差异,来计算物体与测距仪之间的距离。
这个过程需要使用红外线信号处理器,它可以将红外线信号转换成数字信号,然后发送到显示屏上。
五、显示距离最后,测距仪的显示屏会显示物体与测距仪之间的距离。
这个距离可以通过简单的算术公式来确定,具体公式如下:距离(d)=光速(c)×时间(t)÷2其中,光速(c)为光在真空中的速度,约为每秒299792458米;时间(t)为红外线信号从发送器发射到被接收器接收的时间,单位为秒;÷2是因为红外线信号从测距仪发出后,需要经过一段距离,再从物体反射回来,所以需要将总时间除以2得到物体与测距仪之间的距离。
总之,红外线测距原理是一种基于红外线反射原理的测距方法,它可以用于实现物体与测距仪之间的距离测量。
尽管这种方法并不是完美的,但它是一种简单、便捷的测距方式,因此得到了广泛的应用。
红外测距的工作原理红外测距是一种常用的测量技术,可以通过红外线的特性来测量物体与测距设备之间的距离。
它的工作原理是利用红外线的传播特性和反射原理。
我们需要了解一下红外线的特性。
红外线是一种电磁辐射,其波长较长,无法被人眼所察觉。
而红外线的传播是以直线的方式进行的,当遇到物体时会发生反射、吸收或透射。
这些特性为红外测距提供了基础。
红外测距的设备通常由红外发射器和红外接收器组成。
红外发射器会发射一束红外线,这束红外线会照射到目标物体上。
目标物体与红外线的相互作用会导致红外线的反射、吸收或透射。
接下来是红外接收器的工作原理。
红外接收器会接收到被目标物体反射、吸收或透射的红外线。
接收器中包含一个红外敏感元件,它可以将红外线转换成电信号。
这个电信号会经过放大和处理,最终转换成与目标物体距离相关的输出信号。
红外测距的原理是根据红外线的反射时间来计算目标物体与测距设备之间的距离。
当红外线照射到目标物体上后,会经过一段时间后被红外接收器接收到。
根据红外线的传播速度和反射时间,可以计算出目标物体与测距设备之间的距离。
在红外测距中,可以使用不同的方法来计算距离。
其中一种常用的方法是时间差法。
该方法通过测量红外线从发射到接收的时间差来计算距离。
具体来说,红外发射器发射红外线后,红外接收器开始计时。
当接收到红外线后,停止计时。
根据时间差和红外线的传播速度,可以计算出目标物体与测距设备之间的距离。
除了时间差法,还可以使用强度法来进行红外测距。
强度法是通过测量红外线的强度来反推目标物体与测距设备之间的距离。
红外线在传播过程中会衰减,当红外线到达接收器时,它的强度会减弱。
通过测量接收到的红外线的强度,可以推断出目标物体与测距设备之间的距离。
红外测距技术在很多领域都得到了广泛应用,例如自动驾驶、智能家居、工业自动化等。
它具有测量精度高、响应速度快、非接触性等优点。
同时,红外测距也存在一些限制,例如受到环境光干扰、测量范围有限等。
红外线测距原理
红外线测距利用红外线传感器发射一束红外线,然后通过接收器接收反射回来的红外线。
红外线的传输速度是已知的,因此通过测量红外线的往返时间,可以计算出目标物体与传感器之间的距离。
红外线传感器中的红外发射器会产生特定频率的红外光束,这束光会朝着目标物体发射。
当光束遇到物体时,一部分光会被反射回来并被接收器接收。
接收器中的红外接收器会将接收到的红外光转化为电信号,并传输给测距系统。
测距系统中的时钟会记录下红外光从发射到接收的时间间隔,即往返时间。
然后,利用已知的红外线传输速度与往返时间的关系,计算出物体与传感器之间的距离。
红外线测距的原理基于光的传输速度是一个已知的常数,因为红外线的传输速度与光速相近。
因此,通过测量红外光的往返时间,就能够准确地计算出物体与传感器之间的距离。
红外线测距具有测量距离准确、反应速度快、适用于不同环境等优点。
因此,在很多应用领域,如机器人导航、自动门控制、安防监控等,红外线测距技术被广泛应用。
在本次红外测距实验中,我有幸亲身体验了红外测距技术的原理和应用,这不仅加深了我对物理知识的理解,也让我对红外测距技术产生了浓厚的兴趣。
以下是我对本次实验的一些感想。
首先,红外测距技术的基本原理给我留下了深刻的印象。
通过红外线传播的特性,我们可以利用红外发射模块和接收模块之间的时间差来计算物体距离。
这种非接触式的测量方式在日常生活中有着广泛的应用前景,如智能家居、工业自动化、机器人避障等领域。
实验过程中,我了解到红外线在传播过程中不会发生扩散,这使得测量结果更加准确。
此外,红外线具有较小的折射率,有利于在复杂环境中进行测量。
在实验操作方面,我深刻体会到了红外测距仪的便捷性和实用性。
相较于传统的测距方式,红外测距仪具有体积小、重量轻、操作简单等优点。
在实验过程中,我们使用STC89C52单片机和红外传感器构建了一个简单的红外测距报警系统。
通过编程,单片机能够实时读取红外传感器的数据,并在检测到距离小于预设值时发出报警信号。
这种设计在安全监控、智能家居等领域具有很高的应用价值。
红外测距技术在精度、分辨率、抗干扰能力等方面具有显著优势。
在实验中,我注意到红外测距仪在近距离测量上具有较高的精度,且成本相对较低。
与雷达测距、激光测距等传统测距方式相比,红外测距技术在抗干扰能力、成本和易用性方面更具优势。
这使得红外测距技术在民用领域具有广阔的市场前景。
在本次实验中,我还对红外线在现实生活中的应用有了更深入的了解。
例如,红外遥控器、红外传感器在智能家电、安防系统、工业自动化等领域都有着广泛的应用。
通过本次实验,我意识到红外测距技术在推动科技进步、改善人们生活质量方面发挥着重要作用。
此外,实验过程中我还学会了如何使用红外传感器和单片机进行编程。
这对我今后的学习和工作具有重要意义。
在今后的学习和工作中,我将继续关注红外测距技术的发展,探索其在各个领域的应用。
总之,本次红外测距实验让我受益匪浅。
通过亲身体验,我对红外测距技术的原理、应用和发展趋势有了更深入的了解。
红外测距原理
红外测距原理是基于红外光的反射和接收时间差测量目标物体到测距仪的距离。
红外测距装置通常由红外发射器和红外接收器组成。
当红外发射器发出红外光束后,光束会照射到目标物体上并被反射。
接收器会接收到反射回来的红外光,并通过测量光的传播时间来计算距离。
红外光是一种电磁波,其频率高于可见光,人眼无法直接看到。
红外发射器会发射出红外光脉冲,而红外接收器会捕捉到反射回来的光脉冲。
通过测量红外光从发射到接收的时间差,可以计算出光的传播时间。
由于光在真空中的传播速度是已知的,因此可以根据光传播时间和光速的关系来计算出目标物体到测距仪的距离。
要实现准确的测距,通常会采用多次测量并取平均值的方式,以降低测量误差。
此外,还需要考虑一些因素,如红外光的衰减、反射率等对测量结果的影响。
红外测距原理在许多应用领域都有广泛的应用,包括机器人导航、自动驾驶、安防监控等。
它能够实现非接触、高精度的距离测量,具有灵敏、快速的特点,因此成为了现代科技中不可或缺的重要技术。
红外测距的工作原理
红外测距是一种利用红外线进行距离测量的技术。
其工作原理主要包括发射红外信号、接收反射信号和计算距离三个步骤。
1. 发射红外信号:红外测距传感器内部有一个红外线发射器,它会发射出一束红外线信号。
2. 接收反射信号:红外线发射器发射的红外线信号会照射到目标物体上,部分红外线信号会被目标物体反射回传感器。
3. 计算距离:传感器内部有一个红外线接收器,它接收到反射回来的红外线信号。
通过测量红外线信号的强度,可以计算出目标物体与传感器之间的距离。
具体的距离计算方式可能会因不同的红外测距传感器而有所不同。
有些传感器会根据红外线信号的强度与距离之间的关系,通过内部的算法计算出距离。
而有些传感器可能会使用时间差测量法,即通过计算红外线信号发射与接收的时间差来计算距离。
需要注意的是,红外测距技术在测量非常短距离时可能存在误差,而且可能会受到环境因素(如温度、湿度、光照等)的影响。
因此,在实际应用中需要根据具体情况来选择适合的红外测距传感器和相应的校准方法,以获得较准确的测量结果。
红外测距的工作原理红外测距是一种常用的非接触式测距技术,它利用红外线的特性来实现物体距离的测量。
红外线是一种电磁波,其波长范围在红色可见光和微波之间。
红外测距的工作原理可简单描述为:发射红外线,接收反射红外线,根据时间差计算距离。
红外测距的工作原理是基于光的反射与接收的原理。
红外测距系统由发射器和接收器组成。
发射器发射一束红外线,该红外线会照射到目标物体上。
目标物体会反射一部分红外线回到接收器上。
接收器接收到反射的红外线,并将其转化为电信号。
发射器和接收器之间的时间差可以用来计算物体与红外测距系统之间的距离。
这是因为红外线在空气中传播的速度是已知的,可以通过测量发射和接收红外线之间的时间差来计算距离。
根据光的速度为3×10^8 m/s,可以使用以下公式计算距离:距离 = 光速× 时间差 / 2其中时间差是接收器接收到反射红外线的时间与发射器发射红外线的时间之间的差值。
红外测距的精度和稳定性取决于发射器和接收器的性能。
发射器需要能够产生稳定的红外线,并具有适当的发射功率和波长。
接收器需要能够高效地接收反射的红外线,并将其转化为准确的电信号。
此外,环境因素如光照强度、温度和湿度等也会对红外测距的精度和稳定性产生影响,因此需要对这些因素进行适当的校正和补偿。
红外测距技术在许多领域都得到了广泛应用。
在自动化控制系统中,红外测距可以用于测量物体的位置和距离,从而实现自动化控制和导航。
在工业领域,红外测距可以用于测量物体的尺寸和位置,实现精确的生产和装配。
在安防领域,红外测距可以用于监测和报警,提高安全性和防护能力。
在无人驾驶领域,红外测距可以用于障碍物检测和避障,提高自动驾驶的安全性和可靠性。
除了测量距离,红外测距还可以用于测量物体的其他参数,如温度和湿度等。
通过选择不同波长的红外线,可以实现对不同参数的测量。
例如,红外热成像技术利用红外线的热辐射特性,可以实现对物体温度的测量和图像显示。
利用红外发射接收传感器进行距离检测一、实验要求对红外的发射接收作进一步的探讨。
红外可以用来测距离,理解红外测距的基本原理,能够掌握简单的比例控制方法,以及编程。
掌握定时/计数器的使用。
对循迹效果作分析。
二、实验概要本实验将探讨红外测距的内容。
利用红外检测器的内置电子滤波功能,调节发射红外的载波频率,而检测器对不同频率的信号有不同的“敏感度”,这样,就能大概的知道距离。
1.测试红外的扫描频率。
记录红外发射接收的距离。
2.尾随小车。
让一个小车跟着另一个小车前行。
要将前后距离控制在一定的范围内,若前后距离较大,后面跟随的小车应该加速,跟上去;若距离小于预定值,则减速。
3.跟踪黑色条纹带。
红外测距的另一种形式的应用。
也能让小车实现循迹功能。
三、实验内容红外技术发展到现在,已经为大家所熟知,这种技术已经在现代科技、国防和工农业等领域获得了广泛的应用。
红外传感系统是用红外线为介质的测量系统,按照功能能够分成五类:(1)辐射计,用于辐射和光谱测量;(2)搜索和跟踪系统,用于搜索和跟踪红外目标,确定其空间位置并对它的运动进行跟踪;(3)热成像系统,可产生整个目标红外辐射的分布图像;(4)红外测距和通信系统;(5)混合系统,是指以上各类系统中的两个或者多个的组合。
红外传感器根据探测机理可分成为:光子探测器(基于光电效应)和热探测器(基于热效应)。
本次试验将尝试用红外来测距。
1.测试扫描频率下图9-1显示的是一个特殊品牌的红外线探测器数据表(Panasonic PNA4602M)的部分摘录。
这个摘录显示了红外线探测器在接收到频率不同于38.5 kHz时红外线信号时其敏感程度随频率变化的曲线图。
例如,当你发送频率为40 kHz的信号给探测器时,它的灵敏度是频率为38.5 kHz的50%。
如果红外LED发送频率为42 kHz,探测器的灵敏度是频率为38.5 kHz的20%左右。
尤其是对于让探测器的灵敏度很底的频率,为了让探测器探测到红外线的反射,物体必须离探测器更近让反射的红外光更强。