对称矩阵的对角化
- 格式:pptx
- 大小:1.92 MB
- 文档页数:15
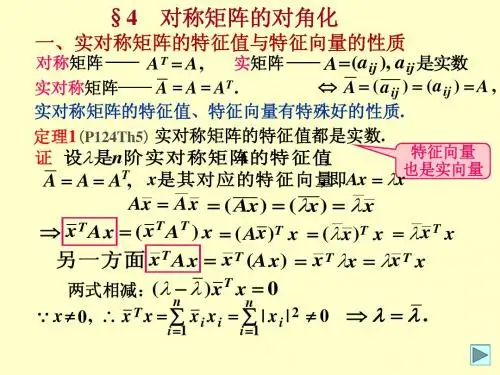

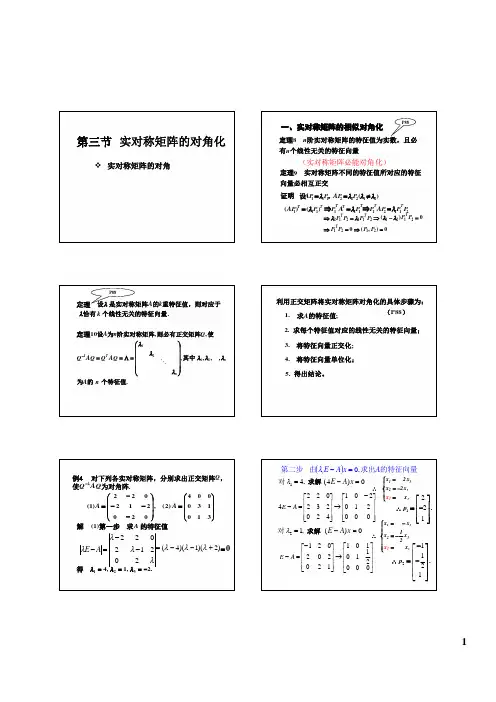
一、实对称矩阵的相似对角化P88第三节 实对称矩阵的对角化v 实对称矩阵的对角化定理8 n阶实对称矩阵的特征值为实数,且必 有n个线性无关的特征向量.(实对称矩阵必能对角化)定理9 实对称矩阵不同的特征值所对应的特征 向量必相互正交. 证明 设AP ,AP 1 =l 1P 1 2 = l2 P 2 (l1 ¹ l2 )T T T ( AP 1 AP 2 =l 1P 1 P 2 1 ) = (l 1P 1) Þ P 1 A =l 1P 1 ÞP T TT 2 1 T 1 1 TTTÞ l P P2 = l P P2 Þ (l1 - l2 ) P1 P2 = 0T 1Þ P P2 = 0 Þ ( P1 , P2 ) = 0P88定理 设l 是实对称矩阵 A的k重特征值,则对应于 l恰有 k 个线性无关的特征向量 . 定理10设A为n阶实对称矩阵, 则必有正交矩阵Q , 使æ l1 ç ç Q -1 AQ = QT AQ = L = ç ç ç è 为A的 n 个特征值.利用正交矩阵将实对称矩阵对角化的具体步骤为: 1.求A的特征值;(P88)2. 求每个特征值对应的线性无关的特征向量; 3. 将特征向量正交化; 4. 将特征向量单位化; 5. 得出结论。
l2ö ÷ ÷ ÷, 其中 l1 , l2 , L , ln O ÷ ln ÷ ø例4 对下列各实对称矩阵,分别求出正交矩阵Q, -1 使Q AQ 为对角阵. æ 2 -2 0 ö æ 4 0 0ö ç ÷ ç ÷ (1) A = ç - 2 1 - 2 ÷ , ( 2) A = ç 0 3 1 ÷ ç 0 -2 0 ÷ ç 0 1 3÷ è ø è ø 解 (1)第一步 求 A 的特征值第二步 由(li E - A)x = 0, 求出A的特征向量 ì x1 = 2 x3 对 l1 = 4, 求解 (4 E - A) x = 0 ï\é2 2 0ù é1 0 - 2ù ú ê ú 4E - A = ê ê2 3 2ú ® ê0 1 2 ú ê ë0 2 4ú û ê ë0 0 0 ú ûí x 2 = -2 x 3 ïx = x3 î 3得 l1 = 4, l2 = 1, l3 = -2.l -2 2 0 lE - A = 2 l -1 2 = (l - 4)(l - 1)(l + 2)= 0 0 2 l对 l2 = 1, 求解 ( E - A) x = 0é- 1 2 0ù é1 0 ú ê E-A=ê ê 2 0 2ú ® ê0 1 ê ë 0 2 1ú û ê ë0 0ì x1 = - x 3 ï 1 ï \ í x2 = - x3 2 ï 1ù ï x3 é î x3 =é2ù ú \ p1 = ê ê -2 ú . ê1û ú ë1ú 2ú 0ú û-1 ù ê 1ú \ p2 = ê - ú . ê 2ú ê 1 ú ë û1对 l3 = -2, 求解 ( -2 E - A) x = 01ù é 0 ù ê1 0 - ú \ é2 2 2 ú ê ú - 2E - A = ê ê2 - 3 2 ú ® ê0 1 - 1 ú ê ë 0 2 - 2ú û ê0 0 0 ú ê ú ë ûê ú \ p3 = ê 1 ú . ê1ú ê ú 第三步 将特征向量正交化 ë û 由于p1 , p2 , p3是属于A的3个不同特征值l1 , l2 ,第四步 将特征向量单位化 p 令 pi 0 = i , i = 1, 2, 3. pi1 ì ï x1 = 2 x 3 ï í x 2 = x3 ïx = x 1 ù 3é ï 3 ê2ú î得æ1 3ö æ -2 3 ö æ 23ö ç ÷ ç ÷ ç ÷ 0 0 p = ç -2 3 ÷ , p2 = ç -1 3 ÷ , p3 = ç 2 3 ÷ . ç 13 ÷ ç 2 3÷ ç 23÷ è ø è ø è ø0 1æ 2 -2 1 ö 1ç ÷ 作 Q = ( p10 , p2 0 , p30 ) = ç -2 -1 2 ÷ , 3ç 2 2÷ è 1 øl3的特征向量, 故它们必两两正交.则æ4 0 0 ö ç ÷ Q -1 AQ = ç 0 1 0 ÷ . ç 0 0 -2 ÷ è øæ 4 0 0ö ç ÷ (2) A = ç 0 3 1 ÷ ç 0 1 3÷ è ø l -4解: lE - A =对 l1 = 2, 求解 ( 2 E - A) x = 00 l -3 -120 00 -1l -3é- 2 0 0 ù é1 0 0ù ú ê ú 2E - A = ê ê 0 - 1 - 1ú ® ê0 1 1ú ê 0 - 1 - 1ú ê0 0 0û ú ë û ëì x1 = 0 ï \ í x2 = - x3 ïx = x 3 î 3= (l - 2)(l - 4) ,得特征值 l1 = 2, l2 = l3 = 4.é0ù ú \ p1 = ê ê -1ú . ê1û ú ë对 l2 = l3 = 4, 求解 ( 4 E - A) x = 0é0 0 0 ù é0 1 - 1ù ú ê ú 4E - A = ê ê0 1 - 1ú ® ê0 0 0 ú ê0 - 1 1 ú ê0 0 0 û ú ë û ëp2与p3恰好正交 ,所以 p1 , p2 , p3两两正交.再将 p1 , p2 , p3单位化, 令pi 0 =æ 0 ö æ 1ö ç ÷ ç ÷ 0 p = ç -1 2 ÷ , p2 = ç 0 ÷ , ç 0÷ ç ÷ è ø è1 2 ø0 1ì x1 = x1 ï \ í x2 = x3 ï î x3 = x3é1 ù é 0ù ú , p = ê1 ú . \ p2 = ê 0 ê ú 3 ê ú ê ê ë 0ú û ë1 ú ûpi pi0( i = 1, 2, 3) 得æ 0 ö ç ÷ p3 = ç 1 2 ÷ . ç ÷ è1 2 ø2于是得正交阵0 11 0 ö æ 0 ç ÷ Q = ( p , p2 , p3 ) = ç - 1 2 0 1 2 ÷ ç ÷ è 1 2 0 1 2ø0 0æ 2 0 0ö ç ÷ Q -1 AQ = ç 0 4 0 ÷ . ç 0 0 4÷ è ø3。