电子设计大赛G题总方案原理图程序
- 格式:docx
- 大小:213.81 KB
- 文档页数:19
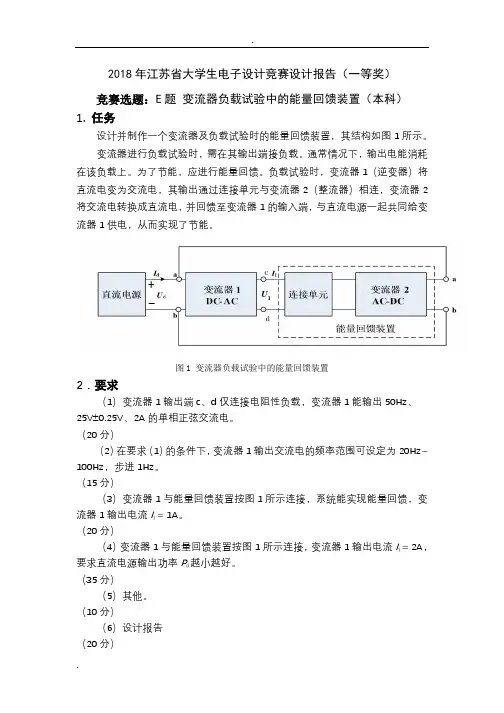
2018年江苏省大学生电子设计竞赛设计报告(一等奖)竞赛选题:E题变流器负载试验中的能量回馈装置(本科)1.任务设计并制作一个变流器及负载试验时的能量回馈装置,其结构如图1所示。
变流器进行负载试验时,需在其输出端接负载。
通常情况下,输出电能消耗在该负载上。
为了节能,应进行能量回馈。
负载试验时,变流器1(逆变器)将直流电变为交流电,其输出通过连接单元与变流器2(整流器)相连,变流器2将交流电转换成直流电,并回馈至变流器1的输入端,与直流电源一起共同给变流器1供电,从而实现了节能。
+_U1图1 变流器负载试验中的能量回馈装置2.要求(1)变流器1输出端c、d仅连接电阻性负载,变流器1能输出50Hz、25V 0.25V、2A的单相正弦交流电。
(20分)(2)在要求(1)的条件下,变流器1输出交流电的频率范围可设定为20Hz~ 100Hz,步进1Hz。
(15分)(3)变流器1与能量回馈装置按图1所示连接,系统能实现能量回馈,变流器1输出电流I1 = 1A。
(20分)(4)变流器1与能量回馈装置按图1所示连接,变流器1输出电流I1 = 2A,要求直流电源输出功率P d越小越好。
(35分)(5)其他。
(10分)(6)设计报告(20分)3.说明(1)图1所示的变流器1及能量回馈装置仅由直流电源供电,直流电源可采用实验室的直流稳压电源。
(2)图1中的“连接单元”可根据变流器2的实际情况自行确定。
(3)电路制作时应考虑测试方便,合理设置测试点。
(4)能量回馈装置中不得另加耗能器件。
(5)图1中,a、b与c、d端应能够测试,a、c端应能够测量电流;c、d 端应能够断开,另接其他阻性负载。
0摘要本设计是一种采用STC12C5A60S2单片机为主控的变流器负载试验中的能量回馈装置。
其逆变板单片机采用查表法,输出SPWM到H桥,将输入的38v直流电压,逆变到25v 交流电输出,通过按键能控制其输出20~100Hz的正弦波,1Hz步进。

2009年全国大学生电子设计竞赛G题低频功率放大器题解分享本主题由 soso 于 2009-10-30 16:47 解除置顶裸片初长成芯币4693 枚∙个人空间∙发短消息∙加为好友∙当前离线xu__changhua的全部文章楼主大中小发表于 2009-9-8 01:06 只看该作者2009年全国大学生电子设计竞赛G题低频功率放大器题解分享2009年全国大学生电子设计竞赛G题是一个设计功率放大器的题,主要考核学生模拟电子技术的基础技能,要求是一定要用场效应晶体管做末级放大,且电路增益要求很大,如5mV的输入要达到5W(8欧负载)的输出,算下来要1265倍,这么大倍数的放大器还要求噪声非常小,小到5mV,失真度1%,这题相对来说是比较难的。
此外,还要检测放大器的输出功率、电源供给功率以及效率,这部分稍微容易些,但是也不是那么轻易就能解决的。
先说说实现方案吧。
功率放大器实现方法有几类,低频的有甲、乙、甲乙、丁等几种。
甲类效率很低,约20%左右,但是其失真度可以做的非常小,如0.1%,效率没做评分要点,只是适当考虑,所以可以采用;乙类的只能有半周输出,失真度太大所以不能采用。
甲乙类是解决甲类的效率和乙类的失真度的综合途径,推荐采用;丙类肯定不用了,那是高频功率放大器专用的类型,这里是低频的(10Hz~50KHz),所以不能采用;丁类的(就是所谓的D类)采用H桥的开关方式工作,输入的信号要进行PWM(PWM是脉冲宽度调制),H桥输出后是一个开关量,要经过LC滤波转变为模拟量,再传送给扬声器。
这种方法效率极高,但是电路复杂,调试困难,且效率不做评分的主要依据,建议舍弃这种方案。
经过综合权衡考虑,宜采用甲乙类比较合适。
再说下电路组成结构该课题有三个主要部分构成,1:功率传输部分;2:电压放大部分(1265倍以上);3:信号测量部分功率传输部分没得选,课题已经规定了,一定得用场效应管,最好是P沟道和N沟道互补,这么大功率的场效应管要用V-MOS的,需要查场效应管资料来选型,尤其注意其源极电阻要小,这样才能发挥出优秀的转换效率,此外就是电压和电流的选型。
6.2 电子竞赛作品设计制作步骤与一般的电子产品设计制作不同的是,电子设计竞赛作品设计制作一方面需要遵守电子产品设计制作的一般规律,另一方面要在限定时间、限定人数、限制设计制作条件、限制交流等情况下完成作品的设计制作,电子竞赛作品设计制作有自己的规律。
电子竞赛作品设计制作大约需经过题目选择、系统方案论证、子系统、部件设计与制作、系统综合、调试与测量等步骤,最后完成作品和设计总结报告。
6.2.1 题目选择全国大学生电子设计竞赛作品设计制作时间是4天3晚,3人一组。
竞赛题目一般为5~6题,题目在竞赛开始时〔第1天的8.00〕开启。
以2003年第6届为例共有6题:电压控制LC振荡器〔A题〕、宽带放大器〔B题〕、低频数字式相位测量仪〔C题〕、简易逻辑分析仪〔D题〕、简易智能电动车〔E题〕、液体点滴速度监控装置〔F题〕。
正确地选择竞赛题目是保证竞赛成功的关键。
参赛队员应仔细阅读所有的竞赛题目,根据自己组3个队员的训练情况,选择相应的题目进行参赛制作。
选择题目按照如下原则进行:(1)明确设计任务,即“做什么?”。
选择题目应注意题目中不应该有知识盲点,即要能够看懂题目要求。
如果不能看懂题目要求,原则上该题目是不可选择的。
因为时间是非常紧张的,没有更多的时间让你去重新学习,另外根据竞赛纪律,也不可以去请教老师。
(2)明确系统功能和指标,即“做到什么程度?”。
注意题目中的设计要求一般分基本要求和发挥部分两部分,各占50分。
应注意的是基本部分的各项分值题目中是没有给出的,但在发挥部分往往会给出的各小项的分值。
选择时要仔细分析各项要求,综合两方面的要求,以取得较好的成绩。
(3)要确定是否具有完成该设计的元器件、最小系统、开发工具、测量仪器仪表等条件。
在没有对竞赛题目进行充分地分析之前,一定不能够进行设计。
题目一旦选定,原则上是应保证不要中途更改。
因为竞赛时间只有4天3晚,时间上不允许返工重来。
6.2.2 系统方案论证题目选定后,需要考虑的问题是如何实现题目的各项要求,完成作品的制作,即需要进行方案论证。
目录1设计任务分析 (1)2方案设计与论证 (1)2.1三套可行方案选择 (1)2.2最佳方案论证 (2)2.2.1 电机选择 (2)2.2.2 运水量测量 (2)2.2.3 自动给水装置与机器人的通讯 (3)2.2.4 路面黑线检测 (3)2.2.5 其他方案论证 (3)2.3最终系统方案 (3)3系统电路分析与软件说明 (4)3.1电路分析 (4)3.1.1 黑线检测电路 (4)3.1.2 分布导线水量测量法 (4)3.1.3 机器人与自动装水装置通讯模块 (5)3.2软件说明 (5)4数据测试 (6)5 创新总结 (6)5.1系统设计创新点 (6)5.2心得体会 (7)附页 (8)摘要:本运水机器人从实际应用出发,充分融入机电一体化的思想,使机器人具备自动装水、按照设定路线进行运水、并在目的地准确卸水的基本功能。
此外,运水量的测量、工作过程的自动计时、运水温度的测量、工作状态的语音适时播报、相关信息液晶屏显示等附加功能的实现,使本机器人具备良好的人机交互界面。
控制系统采用主从机的结构框架进行设计。
此外根据水的导电特性,创造性的设计出了一套由导线和比较器构成的液位测量系统。
关键词:自动运水;水量测量;语音播报1 设计任务分析设计一套运水机器人系统,使此机器人能够将装水区域的水运输到指定区域,并能进行自动卸水。
装水区域A与卸水区域C之间由一根宽度不大于20mm的引导黑线相连;引导线所在的区域为运输区B,三个区域由起始边线和返回边线隔离,边线同样为不大于20mm的黑线。
如图1所示,运水机器人的运水线路图。
图1 机器人运水线路该系统包括A区的自动(或手动)给水装置,装置形状大小及摆放方式自定;往返于A、C区之间的机器人(包含运水容器,其总垂直高度不得超过300mm,储水装置容量不超过600ml,口径不大于100mm),机器人任意部分不得超出其边缘50mm;C区存水装置,口径不得大100mm,高度不得低于250mm,固定底板。
一、总程序#include <reg52.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit key4=P3^3;sbit key5=P3^2;sbit key6=P3^1;sbit key7=P3^0;PWM=P3^4; //直流电机控制输出sbitvoid delayms(uint z){i,j;uintfor(i=0;i<z;i++)for(j=0;j<112;j++);}uchartable_du[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//0--9uchar table_we[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};//0--7uchar wendu[6];signed char wendu_H,wendu_L,wendu_now; //上限值、下限值、当前温度值uchar cnt;#include "24C02.h"#include "18B20.h"/*数码管显示*/void display(){if(wendu_L<0)wendu_L=-wendu_L;wendu[0]=wendu_H%100/10;wendu[1]=wendu_H%10;wendu[2]=wendu_L%100/10;wendu[3]=wendu_L%10;P2=0x00;P0=0xff;P0=table_du[wendu[0]];|=0xe0;P2&=0x1f;P2P0=table_we[0];|=0xc0;P2&=0x3f;P2delayms(1);P0=table_du[wendu[1]];|=0xe0;P2&=0x1f;P2P0=table_we[1];P2|=0xc0;&=0x3f;P2delayms(1);; P0=table_du[wendu[2]] |=0xe0;P2&=0x1f;P2P0=table_we[2];|=0xc0;P2&=0x3f;P2delayms(1);P0=table_du[wendu[3]];|=0xe0;P2&=0x1f;P2P0=table_we[3];|=0xc0;P2&=0x3f;P2delayms(1);; P0=table_du[wendu[4]] |=0xe0;P2&=0x1f;P2P0=table_we[6];|=0xc0;P2P2&=0x3f;delayms(1);P0=table_du[wendu[5]];|=0xe0;P2&=0x1f;P2P0=table_we[7];P2|=0xc0;&=0x3f;P2delayms(1);}/*开继电器*/void relay(){P0=0x10;P2=0xa0;P2=0x00;}/*按键检测*/void keyscan1(){if(key4==0) /*加上限*/{delayms(2);if(key4==0){wendu_H++;if(wendu_H>99)wendu_H=99;write_24C02(0x00,wendu_H);}while(!key4);}if(key5==0) /*加下限*/else{delayms(2);if(key5==0){wendu_L++;if(wendu_L>wendu_H)wendu_L=wendu_H; write_24C02(0x01,wendu_L);}while(!key5);}if(key6==0) /*减上限*/else{delayms(2);if(key6==0){wendu_H--;if(wendu_H<wendu_L);wendu_H=wendu_Lwrite_24C02(0x00,wendu_H);}while(!key6);}if(key7==0) /*减下限*/else{delayms(2);if(key7==0){wendu_L--;if(wendu_L<0)wendu_H=0;write_24C02(0x01,wendu_L);}while(!key7);}}/*温度控制*/void jiance(){if(wendu_nowwendu_H)>{TR0=1;}else if((wendu_now < wendu_H) && (wendu_now > wendu_L))}{TR0=0;PWM=1;if(wendu_nowwendu_L)<{relay();}else if((wendu_now < wendu_H) && (wendu_now > wendu_L)) {P0=0x00;P2=0xa0;P2=0x00;}}void main(){P0=0x00; //清uln2003P2=0xa0;P2=0x00;P0=0xff; //清数码管P2=0xe0;P2=0x00;P0=0xff; //清流水灯P2=0x80;P2=0x00;TMOD=0x01;TH0=(65536-100)/256;TH0=(65536-100)%256;ET0=1;// TR0=1;EA=1;wendu_H=read_24C02(0x00);wendu_L=read_24C02(0x01); while(1){keyscan1();Read_temperature();jiance();display();}}/*定时器0中断服务函数*/void timer0() interrupt 1{TH0=(65536-100)/256;TH0=(65536-100)%256;cnt++;if(cnt==3){PWM=0;}if(cnt==10){cnt=0;PWM=1;}}// #include "18B20.h"sbit DQ = P1^4 ;void delay(uint i){while(i--);}void DS18B20_init(void){DQ = 1;delay(8);DQ = 0;delay(80);DQ = 1;delay(10);delay(5);}uchar DS18B20_read_char(void) {uchar dat = 0;i=0;ucharfor(i=8;i>0;i--){0;=DQdat>>=1;=1;DQif(DQ)dat|=0x80;delay(5);}return(dat);}void DS18B20_write_char(uchar dat) {i=0;ucharfor (i=8; i>0; i--){0;=DQdat&0x01;=DQdelay(5);1;DQ=dat>>=1;}delay(5);}void Read_temperature(void){a=0;ucharuintb=0;t=0;uintuchar TempH;DS18B20_init();DS18B20_write_char(0xCC); DS18B20_write_char(0x44); delay(200);DS18B20_init();DS18B20_write_char(0xCC); DS18B20_write_char(0xBE);a=DS18B20_read_char();b=DS18B20_read_char();t=b;t=(t<<8)|a;TempH=t>>4;wendu_now=TempH;wendu[4]=TempH%100/10; wendu[5]=TempH%10;}// #include "24C02.h"#define somenop {_nop_();_nop_();_nop_();_nop_();_nop_();} sbit SDA=P2^1;sbit SCL=P2^0;void start(){SDA=1;_nop_();SCL=1;somenop;SDA=0;somenop;SCL=0;}void stop(){SDA=0;_nop_();SCL=1;somenop;SDA=1;}void ack(){SDA=1;somenop;SCL=1;somenop;SCL=0;SDA=1;somenop;}void waitack(){SDA=1;somenop;SCL=1;somenop;if(SDA){SCL=0;stop();}else SCL=0;}/*先送一个字节的高位*/void sendbyte(uchar dat){i;ucharfor(i=0;i<8;i++){if(dat&0x80)SDA=1;else SDA=0;somenop;SCL=1;dat<<=1;somenop;SCL=0;}}uchar readbyte(){i;uchardat;ucharfor(i=0;i<8;i++){SCL=1;somenop;dat<<=1;if(SDA)|=0x01;datSCL=0;somenop;}dat;return}void write_24C02(uchar add,uchar dat) {start();sendbyte(0xa0);waitack();sendbyte(add);waitack();sendbyte(dat);waitack();stop();}uchar read_24C02(uchar add){uchartemp;start();sendbyte(0xa0);waitack();sendbyte(add);waitack();start();sendbyte(0xa1);waitack();temp=readbyte();ack();stop();temp;return}二、流程图程序流程图三、电机驱动电路图。
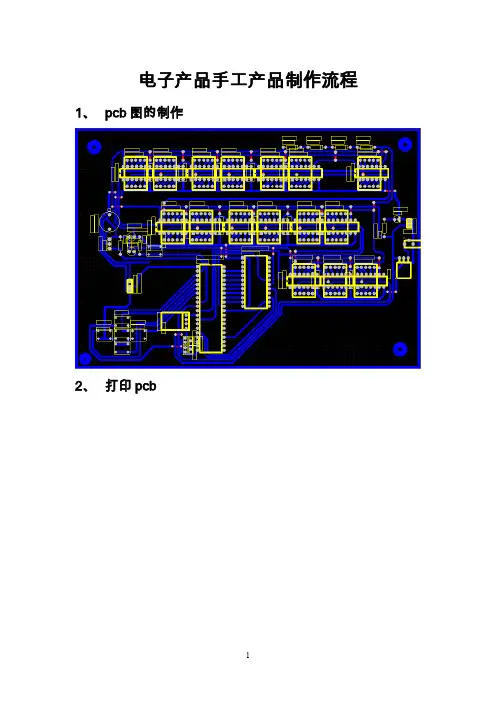
电子产品手工产品制作流程1、pcb图的制作2、打印pcb3、热转印经热转印机将打印好的pcb转印到铜板上。
4、腐蚀电路板将三氯化铁和水按比例调好,将转印过的铜板放入腐蚀。
尽量迅速。
5、打孔腐蚀过的电路板清洗干净后,用转机进行打孔。
注意孔径大小。
5.1 PCB制作的操作说明图5.1 PCB生成流程图5.1.2 据设计要求设计电路原理图,并完成原理图的绘制。
对于简单的原理图也可以进行直接的PCB板绘制。
PCB图如附录B所示。
a. 据原理图生成网络表,这部分PROTEL99是自动进行的,只需要用户单“create Netlist”即可;b. 网络表有也是原理图与印制电路板的接口;c. 规划电路板的结构,即确定电路板的框架,设置系统参数;d. 引入第二步生成的网络表和零件封装,让原理图与印制电路板连接起来;e. 引入网络表后系统将根据规则对零件自动布局进行飞线;f. 修改封装与布局,这是自动布线的前提;g. Protel 99 SE自动布线比较完善,它采用最先进的无网络技术。
基于形状的对角线自动布线技术;h. 自动布线后,如果有不满的地方,我们可以进行手工调整;i. 存盘并打印;j. 结束。
5.2安装工艺安装工艺是制作工程中最关键的一步,它承接上面的设计性工作和下面的调试工作。
为此我们做了大量的学习和练习,具体理论学习知识如下:5.2.1焊接技术装接电路的主要工作是在电路板上焊接电子元器件,焊接质量的好坏直接影响着电路的性能,焊接质量主要取决于四个条件:焊接工具,焊剂,焊料,焊接技术. 为保证焊接质量,要求焊点光亮,圆滑,无虚焊.a.元件引线要刮净,最好先挂锡再焊.因为引线表面经常有氧化物或油渍,不易"吃锡",焊接起来困难,即使勉强焊上也容易形成虚焊,因而必须将氧化物或油渍刮除干净.b.焊接温度和时间要掌握好.温度不够,焊锡流动性差,很容易凝固;温度过高,焊锡流淌,焊点又不易存锡,两种情况都不易焊好.一般焊接时让烙铁头的温度高于焊锡熔点,烙铁头与焊点接触时间以使焊点锡光亮,圆滑为宜.如果焊点不亮或形成"豆腐渣"状,说明温度不够,焊接时间太短.这种情况由于焊剂没能充分挥发,很容易形成虚焊.此时需要增加焊接温度,只要将烙铁头在焊点上多停留些时间即可,不必加压力或来回移动.c.扶稳不晃,上锡适量.焊接时,被焊物体必须扶稳扶牢,特别在焊锡凝固过程中不能晃动被焊元器件,否则很容易造成虚焊.烙铁沾锡多少要根据焊点大小来决定,最好所沾锡量能包住被焊物.如果一次上锡不够,可以下次填补,但要注意再次填补焊锡时,一定要待上次的锡一同熔化后方可移开烙铁头,使焊点熔结为一体.d.电子电路常有一些基本单元组成,电路重复性和规律性较强.焊接时,一般先将电阻,电容,二极管等元件引线弯曲成所需形状,依次插入焊孔,并设法使元件排列整齐,然后统一焊接.检查焊点后剪去过长引线,最后焊接三极管,集成电路.器件的焊接时间一般要短一些,引脚也不宜剪得太短,防止焊接时烫坏管子.初学者可用镊子夹住管脚进行焊接.e.焊接结束,首先检查电路有无漏焊,错焊,虚焊等问题.检查时可用尖嘴钳或镊子将每一个元件拉一拉,看有无松动,特别是要察看三极管管脚是否焊牢,如果发现有松动现象,要重新焊接.5.2.2印制电路板安装与焊接印制电路板的装焊在整个电子产品制造中处于核心的地位,可以说一个整机产品的“精华”部分都装在印制板上,其质量对整机产品的影响是不言而喻的。
2013 年全国大学生电子设计竞赛论文手写绘图板(G题)【本科组】学校:****指导教师: ***参赛者: *********手写绘图板的设计与制作摘要:本设计目的得到一个较为精确的手写绘图板,我们通过一个恒流源接入覆铜板并将八个精密电阻引入,当触摸笔接触到覆铜板任意一个位置时便会检测到一个小电压信号,通过这一原理我们在覆铜板上通过表笔的移动采集差分信号,差分信号有助于信号传输,我们将采集到得信号进行电压跟随以提高电路带负载的能力从而得到较为稳定的小电压信号,再进行前置高精度较高增益放大并通过低通滤波然电路后进入电压跟随电路从而得到更稳定的信号并提高信号准确度及性价比。
被放大的电压信号被高精度的AD采集,经过51单片机的处理得到信号数据并将处理的信号显示到液晶上,从而实现实时显示表笔的位置坐标的要求及其他的显示要求。
关键词 : 差分放大信号处理 AD转换 TFT液晶Abstract:The purpose of this design to get a more accurate handwritten drawing board, We by a constant current source access copper clad and introduces eight precise resistance,When the stylus in contact with the copper clad an arbitrary position will be a small voltage signal is detected, By this principle we move through the pens and the collection on copper clad difference signal,The differential signal helps signal transmission,We will have to follow in order to improve the signal voltage collected circuit on load capacity and relatively stable small voltage signal is obtained,and then to lead high precision but high gain amplifier and low-pass filter circuit after entering voltage follow circuit in order to get more stable signals and improve the accuracy and cost performance.Be amplified voltage signal is high precision AD sampling,After a 51 single-chip processing get signal data and signal display on the LCD,So as to realize the requirement of real-time display pens and position coordinates and other display requirements.Keywords : The differential amplifier The signal processing The AD conversion TFT LCD目录设计要求 (4)1.1 设计任务 (4)1.2 基本要求 (5)1.3 发挥部分 (5)主控系统设计与模块方案选择 (5)2.1 单片机控制系统选取 (5)2.2 模块选择与实现 (6)3.1 系统总体框图 (12)程序模块设计控制系统程序模块流程框图设计 (15)测量方法与分析 (16)4.1 实时显示触点 (16)4.2 点坐标测量及显示 (16)系统测试与低功耗设计 (17)5.1 测试方案 (17)5.2 测试结果和误差分析及改进 (19)5.3 低功耗设计 (21)设计总结 (21)参考文献 (22)附录 (23)6.1 元器件明细 (23)6.2整体系统组成原理图 (24)6.3 主要PCB版图 (26)6.4 程序源代码 (27)设计要求1.1 设计任务利用普通PCB覆铜板设计和制作手写绘图输入设备。
2015年全国大学生电子设计竞赛短距视频信号无线通信网络(G题)2015年8月15日摘要本课题主要研究短距离内通过无线信号网络进行视频信号传输的视频通信网络。
主要可应用于安防、监控、控制、对讲等领域。
本课题采用MAX7456视频叠加器件实现OSD(On Screen Display)技术,通过TX24017视音频发射模块与RX2188视音频接收模块组成无线信号传输系统,实现了短距离内的无线信号视频通信。
关键字:无线网络,视频通信,OSD,字符叠加TOPICAbstract:The main research topics within a short distance video signal transmission network via radio signals video communications network. It can be mainly used in security, monitoring, control, intercom and other fields. This paper uses MAX7456 video overlay devices implement OSD (On Screen Display) technology, consisting of a wireless signal transmission system and RX2188 receiver module by TX24017 audio visual audio transmitter module, wireless video communication signal within a short distance.Keywords:Wireless networking, video communications, OSD目录1系统方案 (3)1.1 无线模块的论证与选择 (3)1.2字符叠加模块的论证与选择 (3)1.3 控制系统的论证与选择 (3)2系统理论分析 (3)2.1系统应用的领域 (3)2.2字符叠加的方案 (3)2.3模块介绍 (4)3电路与程序设计 (4)3.1电路的设计 (4)3.1.1系统总体框图 (4)3.1.2视频叠加模块系统框图 (5)3.1.3视频字符叠加模块电路原理图 (5)3.1.4电源 (5)3.2程序的设计 (5)3.2.1程序功能描述与设计思路 (5)3.2.2程序流程图 (6)4测试方案与测试结果 (6)4.1测试方案 (6)4.2 测试条件与仪器 (7)4.3 测试结果及分析 (7)4.3.1测试结果(数据) (7)4.3.2测试分析与结论 (7)短距视频信号无线通信网络(G题)1系统方案本系统主要由:视频模块、无线模块、字符叠加模块、控制系统、电源模块组成,下面分别论证这几个模块的选择。
2012年山东省职业院校技能大赛高职组“电子产品设计及制作”项目竞赛样题题目:数控步进直流稳压电源的设计与制作一、局部电路设计按所附原理图分析电路工作原理,完成“电路设计区”的电路设计,标出元件编号和参数值,制作一台数控步进直流稳压电源。
二、原理图的绘制与PCB板的设计1.利用Protel99SE软件绘制全电路图,并按要求设计双面PCB电路板。
2.在自己建立的原理图元件库文件中添加需要的元件原理图封装。
3.在自己建立的元件封装库文件中,绘制器件封装。
三、电路焊接及产品组装要求电子产品的焊点大小适中,无漏、假、虚、连焊,焊点光滑、圆润,连线正确、美观。
引脚加工尺寸及成形符合工艺要求。
引线长度、剥头长度符合工艺要求,芯线完好,捻头镀锡。
四、产品装配要求元器件在顶面上安装,元器件摆放平整,高度合理、底面各管脚留有的长度不超过2.5mm,焊盘上的焊锡量要饱满,表面光亮,浸锡要充分,没有虚焊。
接插件、紧固件安装可靠牢固,电路板无烫伤和划伤处,整机清洁无污物。
五、程序设计与调试1. 编制程序完成以下功能要求(1)通过“+”、“—”键步进调整输出电压,可调范围为0~+12V,步进幅度为0.5V。
(2)输出电压和电流值通过4为LED显示,显示精度分别为0.1V和0.01A。
通过“F1”键是吸纳电压/电流显示切换,开机默认显示电压,按“F1”转换为显示电流,再按“F1”转换为显示电压。
4位LED末位显示单位,电流显示“A”,电压显示“V”。
(3)过流保护与报警功能。
2.技术指标(1)交流输入电压范围:%V10220(2)输出电压范围:0~+12V(3)输出电流范围:0~1A(4)输出纹波电压:<10mV(输出电压为10V,输出电流为5000mA时测得)(5)过流保护动作电流:1.1A3. 完成电路组装与程序调试,使其达到规定的功能要求以及技术指标。
六、技术文件要求1.设计文件包括:原理说明(包括电路图、电路框图、电路参数)、程序流程图、印刷电路板图等。
广东省电子设计竞赛设计报告参赛题目:基于Internet和GPRS的智能家居远程监控系统参赛单位:广东工业大学信息工程学院参赛队员: 吴松江卓永洪陈大贺指导老师:***目录摘要..................................................... 错误!未定义书签。
第1章绪论 (4)第2章系统功能与方案设计 (1)2.1系统功能简介 (6)2.1.1系统功能介绍 (6)2.1.2系统功能特色创新点 (4)2.1.3实现原理 (5)2.1.4 功能指标 (5)2.2系统硬件设计 (5)2.2.1系统硬件框图 (5)2.2.2GPRS无线通信模块 .............................................................................. 错误!未定义书签。
2.2.3液晶显示12864模块............................................................................ 错误!未定义书签。
2.2.4摄像头模块............................................................................................ 错误!未定义书签。
2.2.5步进电机模块......................................................................................... 错误!未定义书签。
2.2.6蜂鸣器报警模块..................................................................................... 错误!未定义书签。
题号: G全国大学生电子设计大赛报告题目:简易电阻测试仪【G题】参赛者:冯林评分标准:简易电阻、电容和电感测试仪一、任务设计并制作一台数字显示的电阻、电容和电感参数测试仪,示意框图如下:二、要求1.基本要求(1)测量范围:电阻100Ω~1MΩ;电容100pF~10000pF;电感100μH~10mH。
(2)测量精度:±5% 。
(3)显示测量数值,并分别指示所测元件的类型和单位。
2.发挥部分(1)扩大测量范围。
(2)提高测量精度。
(3)测量量程自动转换。
简易电阻、电容和电感测试仪摘要本设计主要由电阻测试模块、电容测试模块、电感测试模块、分频电路、以及数据选择电路几大功能模块组成。
并通过STC89C52单片机进行频率测量和计算以及对系统的控制,实现对电阻、电容和电感的测试并在LCD1602上显示其测试结果。
系统利用RC震荡原理以及电感的储能原理,配合555定时器组成多谐振荡电路。
由于不同的电容、电阻、电感值的大小对应的谐振频率不同,通过测量振荡电路发出的频率计算出相应的电阻、电容和电感的值。
本系统设计简单,成本低,性能完全超出题目要求指标,测量范围广,在测量范围内测量误差≦1%。
系统操作简单,人机界面友好。
关键词:谐振电路,谐振频率,555定时器Abstract:This design consist of the resistance test module, capacitance test module, inductance test module, points frequency circuit, and data choice circuit several big function module. And through STC89C52 microcontroller undertake frequency measurement and calculation of system control and to realize resistance, capacitance and inductance and displayed on the LCD1602 test results.The system use RC concussion principle and the inductance of the principle, cooperate energy-storage composed resonant circuit 555 timing. Due to the different capacitance and inductance value resistors, the size of the resonance frequency of the corresponding to different, through the test out oscillating circuit to calculate the frequency corresponding resistance, capacitance and inductance value. This system design simple, low cost, performance is beyond the topic request index and wide measurement range in measuring range, measurement error ≦1%. The system operation simple and have a friendly man-machine interface.Keywords: tuned circuit , tuned frequency, 555 timer一、系统方案论证与比较1.系统设计思路根据题目要求的电路示意图可知,本系统需要分别设计三个测试模块分别测试电阻、电容和电感,同时系统只有一个通道将测试信号送入处理器。
** 6位静态显示模块与原理图9.2 静态模块显示原理根据CD4094驱动原理,我们用一个CD4094驱动一个LED,然后串联起来,如果显示6个数据,我们先一次性发送6个数据给CD4094,然后置位显示即可。
9.3 静态模块显示头文件DIS.h//----------------------------------------------------------//启蒙电子:**// 502502562//E-Mail:XX XX//----------------------------------------------------------//程序设计:豆豆//适用型号:DG3000综合开发试验仪//----------------------------------------------------------//----------------------------------------------------------//程序作用:静态显示头文件DIS.h//----------------------------------------------------------//----------------------------------------------------------#ifndef _display_#define _display_#include <intrins.h>#define uchar unsigned char#define uint unsigned int//显示与单片机接口sbit DIS_STB=P2^5;sbit DIS_CLK=P2^7;sbit DIS_SDA=P2^6;//关闭显示#define shut_dis() DIS_STB=1;#define shut_bit() 0xff;//0~9unsigned char code led[18]={0x81,0xb7,0xc2,0x92,0xb4,0x98,0x88,0xb3,0x80,0x90,0xa0,0x8c,0xc9,0x86,0xc8,0xe8};//abcdef/*子程序*/void delay(unsigned int k); //延时子程序void send(unsigned char a); //串入并出子程序void display(uchar display_buffer[4]); //数码管显示子程序//延时程序void delay(unsigned int k){unsigned int i,j;for(i=0;i<k;i++)for(j=0;j<100;j++);}//串入并出发送数据子程序void send(unsigned char a){unsigned char i;for(i=0;i<8;i++){if(_crol_(a,i)&0x80)DIS_SDA=1;elseDIS_SDA=0;DIS_CLK=0;DIS_CLK=1;}}//----------------------------------------------------------//启蒙电子:**// 502502562//E-Mail:XX XX//----------------------------------------------------------//数码管显示子程序void display(uchar display_buffer[6]){ uchar i,k;DIS_STB=0;for(i=0;i<6;i++){k=led[display_buffer[i]];send(k);delay(0x01);}DIS_STB=1;}#endif9.4静态模块显示程序012345 (C51)//6 bit 数码管静态驱动显示程序:012345#include<REG52.h>#include<DIS.h>main(){unsigned char rt[6]={0x00,0x01,0x02,0x03,0x04,0x05};//显示数据缓冲区while(1){display(rt);}9.4静态模块显示程序012345 (汇编);---------------------------------------------------------- ;程序作用:6位数码管静态显示012345(汇编);---------------------------------------------------------- DSTB BIT P2.5;CD4094与单片机的接口DCLK BIT P2.7DDATA BIT P2.6DBUF DATA 40H ;显示缓冲区首址;------------------------------------------------------ORG 0000HJMP MAIN;------------------------------------------------------MAIN: MOV SP,#60HMOV R0,#0FFH;单元清零RES1: MOV @R0,#0DJNZ R0,RES1MOV DBUF,#00H;要显示的数据MOV DBUF+1,#01HMOV DBUF+2,#02HMOV DBUF+3,#03HMOV DBUF+4,#04HMOV DBUF+5,#05HLOOP1:CALL DIRSJMP LOOP1DELAY: ;延时R5×10MSMOV R6,#50DELAY1: MOV R7,#100DJNZ R7,$DJNZ R6,DELAY1DJNZ R5,DELAYRET;----------------------------------------------------- KEYTABLE:DB 0EEH,0EDH,0EBH,0E7H,0DEH ;0,1,2,3,4, 顺序码DB 0DDH,0DBH,0D7H,0BEH,0BDH ;5,6,7,8,9,DB 0BBH,0B7H,07EH,07DH,07BH ;A,B,C,D,E,DB 077H,0FFH ;F 0FF为结束码;-----------------------------------------------------;键值显示子程序;使用一个数码管显示;-----------------------------------------------------DIRS:CLR DSTB;开始送数据MOV A,DBUFMOV DPTR,#DISPLAY_CODEMOVC A,@A+DPTRLCALL TRTMOV A,DBUF+1MOV DPTR,#DISPLAY_CODEMOVC A,@A+DPTRLCALL TRTMOV A,DBUF+2MOV DPTR,#DISPLAY_CODEMOVC A,@A+DPTRLCALL TRTMOV A,DBUF+3MOV DPTR,#DISPLAY_CODEMOVC A,@A+DPTRLCALL TRTMOV A,DBUF+4MOV DPTR,#DISPLAY_CODEMOVC A,@A+DPTRLCALL TRTMOV A,DBUF+5MOV DPTR,#DISPLAY_CODEMOVC A,@A+DPTRLCALL TRTSETB DSTBRETDISPLAY_CODE:DB 81H,0B7H,0C2H,92H ;0,1,2.3 DB 0B4H,98H,88H,0B3H ;4,5,6,7 DB 80H,90H,0A0H,08Ch ;8,9,a,b DB 0C9H,86H,0C8h,0E8h ;c,d,e,f RET;---------------------------------------- TRT:MOV R3,#08HTRT1: CLR DCLKRLC AMOV DDATA,CLCALL MS30SETB DCLKLCALL MS30DJNZ R3,TRT1LCALL MS30RET;-------------------------;延时;------------------------MS30: MOV R7,#0FHMS31: MOV R6,#0FH;MS32: DJNZ R6,MS32 DJNZ R7,MS31RET;----------------------------- END。
2014年TI杯大学生电子设计竞赛题G题:简易风洞及控制系统(高职)设计制作一简易风洞及其控制系统。
风洞由圆管、连接部与直流风机构成,如右所示。
圆管竖直放置,长度约40cm,内径大于4cm且内壁平滑,小球(直径4cm黄色乒乓球)可在其中上下运动;管体外壁应有A、B、C、D等长标志线,BC段有1cm间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部应有防止小球落入连接部的格栅。
控制系统通过调节风机的转速,实现小球在风洞中的位置控制。
2.要求(1)小球置于圆管底部,启动后5秒内控制小球向上到达BC段,并维持5秒以上。
(20分)(2)当小球维持在BC段时,用长形纸板(宽度为风机直径的三分之一)遮挡风机的进风口,小球继续维持在BC段。
(10分)(3)以C点的坐标为0cm、B点的坐标为10cm;用键盘设定小球的高度位置(单位:cm),启动后使小球稳定地处于指定的高度3秒以上,上下波动不超过±1cm。
(10分)(4)以适当的方式实时显示小球的高度位置及小球维持状态的计时。
(10分)(5)小球置于圆管底部,启动后5秒内控制小球向上到达圆管顶部处A端,且不跳离,维持5秒以上。
(10分)(6)小球置于圆管底部,启动后30秒内控制小球完成如下运动:向上到达AB段并维持3~5秒,再向下到达CD段并维持3~5;再向上到达AB段并维持3~5,再向下到达CD段并维持3~5;再向上冲出圆管(可以落到管外)。
(20分)(7)风机停止时用手将小球从A端放入风洞,小球进入风洞后系统自动启动,控制小球的下落不超过D点,然后维持在BC段5秒以上。
(10分)(8)其他自主发挥设计。
(10分)(9)设计报告。
(20分)共1页,G-13.说明(1)题中“到达XX段”是指,小球的整体全部进入该段内;(2)题中“维持”是指,在维持过程中小球整体全部不越过该段的端线;(3)小球的位置以其中心点为准(即小球的上沿切线向下移2cm,或下沿切线向上移2cm);(4)直流风机的供电电压不得超过24V,注意防止风机叶片旋转可能造成的伤害;可在圆管及其周围设置传感器检测管内小球的位置;可将圆管、连接部与直流风机安装在硬质板或支架上,以便于使圆管保持竖直状态,并保持风洞气流通畅。
2022-TI杯大学生电子设计竞赛题目1.任务以TI公司的降压控制器LM5117芯片和CSD18532KCSMOS场效应管为核心器件,设计并制作一个降压型直流开关稳压电源。
额定输入直流电压为时,额定输出直流电压为,输出电流最大值为测试电路可参考图1。
IO++UIN-降压直流稳压电源UO-RL负载识别端口R图1电源测试连接图2.要求(1)额定输入电压下,输出电压偏差:;(10分)(2)额定输入电压下,最大输出电流:;(10分)(3)输出噪声纹波电压峰峰值:;(10分)(4)从满载变到轻载时,负载调整率:;(10分)(5)变化到17.6V和13.6V,电压调整率:(10分)(6)效率;(15分)(7)具有过流保护功能,动作电流;(10分)(8)电源具有负载识别功能。
增加1个2端子端口,端口可外接电阻R(1kΩ-10kΩ)作为负载识别端口,参考图1。
电源根据通过测量端口识别电阻R的阻值,确定输出电压,;(10分)(9)尽量减轻电源重量,使电源不含负载的重量。
(15分)(10)设计报告(20分)A-1项目方案论证主要内容满分3663220比较与选择方案描述降低纹波的方法理论分析与计算DC-DC变换方法稳压控制方法主回路与器件选择电路与程序设计其它控制电路与控制程序(若有)测试方案及测试条件测试方案与测试结果及其完整性测试结果测试结果分析设计报告结构摘要、报告正文结构、公式、图表的完整性和及规范性规范性总分3.说明(1)该开关稳压电源不得采用成品模块制作。
(2)稳压电源若含其它控制、测量电路都只能由端口供电,不得增加其他辅助电源。
(3)要求电源输出电压精确稳定,或,作品不参与测试。
2022年TI杯大学生电子设计竞赛题B题:物品分拣搬送装置1.任务在一个以木条(截面不大3cm某4cm,木质本色)围成的100cm某150cm的A区域内,着边长均为4cm的正方体。
设自动物体搬运系统,能够快速30cm150cmDD20cm于100cmAA散落计一将这些正方体移至指定区域。
江西省第17届电子设计大赛电路原理图《数显调速调光电路》江西省第17届电子设计大赛电路原理图1、题意:现提供一批器材,请在其中选择适当的元器件,设计制作一个至少有三级变速的简单的电扇调速器。
其要求是当分别数显0、1 、2三个数字时,电扇相应处在失电、强电(市电电压)、弱电(小于市电电压)三档级的供电状态。
〖设市电电压为220V,50Hz〗2、模拟制作要求:由于不可能给每一位参赛者提供一台电扇,只好给各位提供220伏交流40瓦的白炽灯泡及塑壳灯头一套(供电导线从提供给作品用的电源线上剪下一段即可)。
用灯泡的熄、亮、暗代替电扇的失电、强电、弱电的三种状态使之成为调光(调速)器。
要求该调光(调速)器有如下功能:白天,手动(自动控制失效)控制灯泡的供电,即每当用手按一次调光(调速)器的按键时,显示的数码变动一字,对应的灯泡(或电扇)供电变化一档。
晚上,自动(手动失效)控制灯泡的供电,即当调光〈调速)器得电后,自行数显"0- 1 -2"循环往复显字的同时,对应有灯泡"失电(灯泡失亮)一强电(灯光正常亮度)一弱电(灯光暗淡)" 循环往复的过程,可形成"自然风"的模式。
该文章版权归DIY乐园电子制作网所有。
作者:蔡国瑞转载请保留链接3、参考电路图:《数显调速调光电路》设计方案1《数显调速调光电路》设计方案2方案2电路说明一、赛题分析电路设计制作:杨谢行,指导:蔡国瑞按赛题要求,白天不工作,只有用手按开关才会调光,晚上自动调光,开始从失电到强电然后到弱电,循环反复,用光控和手动去控制NE555振荡器,当NE555第4脚为高电位时,电路才会工作。
按照电路要求,画出电路波形图如图所示。
通过电路工作图形画出电路方框图。
《数显调速调光电路》设计方案2-电路波形图《数显调速调光电路》设计方案2-电路方框图二、赛题设计将电路分成六大模块设计,电源电路、译码\驱动\显示电路设计、计数\编码电路、手控和光控电路、计数脉冲发生器。
负载2019 年陕西理工大学电子设计竞赛试题微电网模拟系统(A 题)一、任务设计并制作由两个三相逆变器等组成的微电网模拟系统,其系统框图如图 1 所示,负载为三相对称 Y 连接电阻负载。
+- +-交流母线图 1 微电网模拟系统结构示意图二、要求1.基本要求(1)闭合 S ,仅用逆变器 1 向负载提供三相对称交流电。
负载线电流有效值 I o ,2A 时,线电压有效值 U o 为 24V ±0.2V ,频率 f o 为 50Hz±0.2Hz 。
(2)在基本要求(1)的工作条件下,交流母线电压总谐波畸变率(THD ) 不大于 3%。
(3)在基本要求(1)的工作条件下,逆变器 1 的效率 ƞ 不低于 87%。
(4)逆变器 1 给负载供电,负载线电流有效值 Io 在 0~2A 间变化时,负载调整率 SI1≤0.3%。
2.发挥部分 (1)逆变器 1 和逆变器 2 能共同向负载输出功率,使负载线电流有效值 Io 达到 3A ,频率 fo 为 50Hz±0.2Hz。
(2)负载线电流有效值 Io 在 1~3A 间变化时,逆变器 1 和逆变器 2 输出功率保持为 1:1 分配,两个逆变器输出线电流的差值绝对值不大于 0.1A 。
负载调整率 SI2≤0.3%。
(3)负载线电流有效值 Io 在 1~3A 间变化时,逆变器 1 和逆变器 2 输出功率可按设定在指定范围(比值 K 为 1:2~2:1)内自动分配,两个逆变器输出线电流折算值的差值绝对值不大于 0.1A 。
S逆变器2直流电源2逆变器1直流电源1(4)其他。
三、说明(1)本题涉及的微电网系统未考虑并网功能,负荷为电阻性负载,微电网中风力发电、太阳能发电、储能等由直流电源等效。
(2)题目中提及的电流、电压值均为三相线电流、线电压有效值。
(3)制作时须考虑测试方便,合理设置测试点,测试过程中不需重新接线。
(4)为方便测试,可使用功率分析仪等测试逆变器的效率、THD 等。