89C51单片机C语言编程
- 格式:ppt
- 大小:452.00 KB
- 文档页数:55
89c51单片机C语言编写的PWM程序PWM, 单片机, C语言, 程序, 编写分享到:新浪微博 QQ空间开心网人人网说明:本程序使用STC89C52RC单片机,22.1184MHz晶振,要使用本程序需要自己修改,我是用来控制直流电机的,外接了L298驱动电路,有问题或意见请回复,谢谢^_^#include "reg52.H"#include "MyType.h"//=============L298端口定义===============sbit ENA = P3^6;?//左轮驱动使能sbit IN1 = P0^3;?//左轮黑线(-)sbit IN2 = P0^4;?//左轮红线(+)sbit IN3 = P0^5;?//右轮红线(-)sbit IN4 = P0^6;?//右轮黑线(+)sbit ENB = P3^7;?//右轮驱动使能//=============PWM================#define PWM_COUST 100?//PWM细分等份uchar MOTO_speed1;??//左边电机转速uchar MOTO_speed2; ??//右边电机转速uchar PWM_abs1;???//左边电机取绝对值后占空比uchar PWM_abs2;???//左边电机取绝对值后占空比?uchar PWM_var1=20;??//左边电机直走速度(不同的电机,此参数不同)uchar PWM_var2=20;??//右边电机直走速度uchar PWMAnd = 0;??//PWM自增变量/****************************************************************** 名称:motor(char speed1,char speed2);功能:同时调节电机的转速参数:speed1:电机1的PWM值;speed2:电机2的PWM值?? speed>0.正转;speed<0.反转(-100~100)调用:extern int abs(int val); 取绝对值返回:/******************************************************************/ void motor(char speed1,char speed2){??//==============左边电机=============?if (speed1>0)??{??IN1 =0;IN2 =1;//正转??}???else if (speed1<0)??{??IN1 =1;IN2 =0;//反转??}?//==============右边电机=============?if (speed2>0)??{??IN3 =1;IN4 =0;//正转??}?else if (speed2<0)??{??IN3 =0;IN4 =1;//反转??}}/******************************************************************名称:motor_PWM();功能:PWM占空比输出参数:无调用:无返回:无/******************************************************************/void motor_PWM (){?uchar PWM_abs1;?uchar PWM_abs2;?PWM_abs1=MOTO_speed1;?PWM_abs2=MOTO_speed2;?if (PWM_abs1>PWMAnd) ENA=1;??? //左边电机占空比输出??else ENA=0;?if (PWM_abs2>PWMAnd) ENB=1;??? //右边电机占空比输出??else ENB=0;?if (PWMAnd>=PWM_COUST) PWMAnd=0;? //PWM计数清零??else PWMAnd+=1;}???/******************************************************************名称:void TIME_Init ();功能:定时器初始化指令:调用:无返回:无/******************************************************************/void TIME_Init ()?{//=========定时器T2初始化 PWM==================?T2CON = 0x00;? ?T2MOD = 0x00;? ?RCAP2H = 0xff;?//定时0.1ms? ?RCAP2L = 0x47;? ?TH2 = 0xff;? ?TL2 = 0x47;?ET2 = 1;??//定时器2中断开?TR2 = 1;??//PWM定时器关,PWM周期为10ms?}/******************************************************************名称:void PWM_Time2 () interrupt 5功能:T2中断,PWM控制参数:调用:motor_PWM();//PWM占空比输出返回:/******************************************************************/?void PWM_Time2 () interrupt 5{? ?TR2 = 0;?TF2 = 0;?ET2 = 0;?//定时器0中断禁止?motor_PWM();//PWM占空比输出?ET2 = 1;?//定时中断0开启?TR2 = 1;}main(){TIME_Init ()?;motor(50,50);//左右电机的转速都是50}。

89c51单片机汇编语言1.引言概述部分的内容可以介绍本文的主题:89C51单片机汇编语言。
该部分可以简要说明单片机的概念和应用领域,并强调本文将重点介绍汇编语言在89C51单片机中的应用和相关原理。
以下是一个示例:引言1.1 概述单片机是一种嵌入式系统中常用的微型计算机。
它具备微处理器、存储器、输入输出接口等核心部件,并通过时钟信号实现对不同外设的控制。
作为一种低成本、体积小、功耗低的控制器,单片机广泛应用于各个领域,如家电、通信、工业自动化等。
本文着重介绍了89C51单片机的汇编语言编程。
汇编语言是一种低级语言,直接操作底层硬件,非常适合在单片机上进行程序开发。
本文旨在帮助读者理解汇编语言在89C51单片机中的运行原理和应用场景。
首先,将会对89C51单片机进行详细介绍,包括其基本特性、内部结构和常见的应用领域。
然后,将会对汇编语言的基础知识进行解析,包括指令系统、寄存器和内存的使用方法等相关内容。
通过本文的学习,读者将能够掌握如何使用汇编语言编写简单的单片机程序,并了解如何利用89C51单片机进行各种实际应用的开发。
本文的结论将对所学内容进行总结,并对未来的学习和应用提出展望。
通过深入学习和实践,读者可以不仅仅掌握汇编语言的编程技巧,还能够开发出更加复杂和实用的单片机应用。
希望本文能够对读者在89C51单片机的汇编语言编程方面提供有价值的指导和帮助。
让我们开始探索吧!1.2 文章结构文章结构部分主要介绍了本文的组织结构和各章节的内容概述。
正文中介绍了89C51单片机的基本知识,以及汇编语言的基础知识。
结论部分总结了本文的主要观点,并展望了相关领域的发展方向。
在本文中,我们首先会在引言部分进行概述,介绍本文的总体内容和目的。
其次,在正文部分的第2.1节中,我们将详细介绍89C51单片机的基本知识,包括其特点、应用领域以及与其他单片机的比较等内容。
在第2.2节中,我们将深入讲解汇编语言的基础,包括指令集、寄存器、数据传送等重要概念和操作方法。
89c51单片机C语言编写的PWM程序PWM, 单片机, C语言, 程序, 编写分享到:新浪微博 QQ空间开心网人人网说明:本程序使用STC89C52RC单片机,22.1184MHz晶振,要使用本程序需要自己修改,我是用来控制直流电机的,外接了L298驱动电路,有问题或意见请回复,谢谢^_^#include "reg52.H"#include "MyType.h"//=============L298端口定义===============sbit ENA = P3^6;?//左轮驱动使能sbit IN1 = P0^3;?//左轮黑线(-)sbit IN2 = P0^4;?//左轮红线(+)sbit IN3 = P0^5;?//右轮红线(-)sbit IN4 = P0^6;?//右轮黑线(+)sbit ENB = P3^7;?//右轮驱动使能//=============PWM================#define PWM_COUST 100?//PWM细分等份uchar MOTO_speed1;??//左边电机转速uchar MOTO_speed2; ??//右边电机转速uchar PWM_abs1;???//左边电机取绝对值后占空比uchar PWM_abs2;???//左边电机取绝对值后占空比?uchar PWM_var1=20;??//左边电机直走速度(不同的电机,此参数不同)uchar PWM_var2=20;??//右边电机直走速度uchar PWMAnd = 0;??//PWM自增变量/****************************************************************** 名称:motor(char speed1,char speed2);功能:同时调节电机的转速参数:speed1:电机1的PWM值;speed2:电机2的PWM值?? speed>0.正转;speed<0.反转(-100~100)调用:extern int abs(int val); 取绝对值返回:/******************************************************************/ void motor(char speed1,char speed2){??//==============左边电机=============?if (speed1>0)??{??IN1 =0;IN2 =1;//正转??}???else if (speed1<0)??{??IN1 =1;IN2 =0;//反转??}?//==============右边电机=============?if (speed2>0)??{??IN3 =1;IN4 =0;//正转??}?else if (speed2<0)??{??IN3 =0;IN4 =1;//反转??}}/******************************************************************名称:motor_PWM();功能:PWM占空比输出参数:无调用:无返回:无/******************************************************************/void motor_PWM (){?uchar PWM_abs1;?uchar PWM_abs2;?PWM_abs1=MOTO_speed1;?PWM_abs2=MOTO_speed2;?if (PWM_abs1>PWMAnd) ENA=1;??? //左边电机占空比输出??else ENA=0;?if (PWM_abs2>PWMAnd) ENB=1;??? //右边电机占空比输出??else ENB=0;?if (PWMAnd>=PWM_COUST) PWMAnd=0;? //PWM计数清零??else PWMAnd+=1;}???/******************************************************************名称:void TIME_Init ();功能:定时器初始化指令:调用:无返回:无/******************************************************************/void TIME_Init ()?{//=========定时器T2初始化 PWM==================?T2CON = 0x00;? ?T2MOD = 0x00;? ?RCAP2H = 0xff;?//定时0.1ms? ?RCAP2L = 0x47;? ?TH2 = 0xff;? ?TL2 = 0x47;?ET2 = 1;??//定时器2中断开?TR2 = 1;??//PWM定时器关,PWM周期为10ms?}/******************************************************************名称:void PWM_Time2 () interrupt 5功能:T2中断,PWM控制参数:调用:motor_PWM();//PWM占空比输出返回:/******************************************************************/?void PWM_Time2 () interrupt 5{? ?TR2 = 0;?TF2 = 0;?ET2 = 0;?//定时器0中断禁止?motor_PWM();//PWM占空比输出?ET2 = 1;?//定时中断0开启?TR2 = 1;}main(){TIME_Init ()?;motor(50,50);//左右电机的转速都是50}。
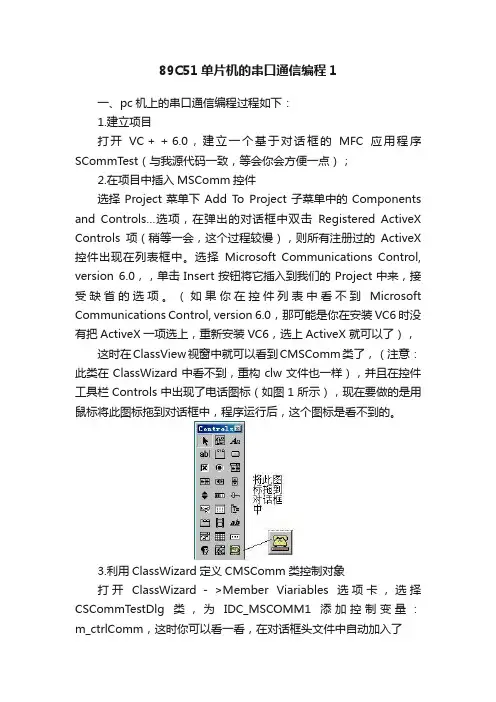
89C51单片机的串口通信编程1一、pc机上的串口通信编程过程如下:1.建立项目打开VC++6.0,建立一个基于对话框的MFC应用程序SCommTest(与我源代码一致,等会你会方便一点);2.在项目中插入MSComm控件选择Project菜单下Add To Project子菜单中的Components and Controls…选项,在弹出的对话框中双击Registered ActiveX Controls项(稍等一会,这个过程较慢),则所有注册过的ActiveX 控件出现在列表框中。
选择Microsoft Communications Control, version 6.0,,单击Insert按钮将它插入到我们的Project中来,接受缺省的选项。
(如果你在控件列表中看不到Microsoft Communications Control, version 6.0,那可能是你在安装VC6时没有把ActiveX一项选上,重新安装VC6,选上ActiveX 就可以了),这时在ClassView视窗中就可以看到CMSComm类了,(注意:此类在ClassWizard中看不到,重构clw文件也一样),并且在控件工具栏Controls中出现了电话图标(如图1所示),现在要做的是用鼠标将此图标拖到对话框中,程序运行后,这个图标是看不到的。
3.利用ClassWizard定义CMSComm类控制对象打开ClassWizard->Member Viariables选项卡,选择CSCommTestDlg类,为IDC_MSCOMM1添加控制变量:m_ctrlComm,这时你可以看一看,在对话框头文件中自动加入了//{{AFX_INCLUDES() #include "mscomm.h" //}}AFX_INCLUDES (这时运行程序,如果有错,那就再从头开始)。
4.在对话框中添加控件向主对话框中添加两个编辑框,一个用于接收显示数据ID为IDC_EDIT_RXDATA,另一个用于输入发送数据,ID为IDC_EDIT_TXDATA,再添加一个按钮,功能是按一次就把发送编辑框中的内容发送一次,将其ID设为IDC_BUTTON_MANUALSEND。
第三章单片机C语言程序设计一.C语言的特点1. 语言简洁、紧凑,使用方便、灵活。
2. 运算符丰富。
3. 数据结构丰富。
具有现代化语言的各种数据结构。
4. 可进行结构化程序设计。
5. 可以直接对计算机硬件进行操作。
6. 生成的目标代码质量高,程序执行效率高。
7. 可移植性好。
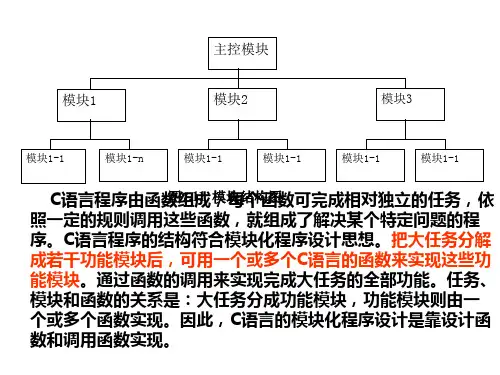
C语言程序采用函数结构,每个C语言程序由一个或多个函数组成,在这些函数中至少应包含一个主函数main(),也可以包含一个main()函数和若干个其它的功能函数。
不管main()函数放于何处,程序总是从main() 函数开始执行,执行到main()函数结束则结束。
在main()函数中调用其它函数,其它函数也可以相互调用, fimain()函数只能调用其它的功能函数,而不能被其它的函数所调用。
功能函数可以是C语言编译器提供的库函数,也可以是由用户定义的自定义函数。
在编制C程序时,程序的开始部分一般是预处理命令、函数说明和变量定义等。
用C 语言编写89C51单片机程序与用汇编语言编写 9C51单片机程序不一样。
用汇编语言编写89C51单片机程序必须要考虑其存储器结构,尤其必须考虑其片内数据存储器与特殊功能 寄存器的使用以及按实际地址处理端口数据o用C 语言编写的89C51单片机应用程序,则不用像 汇编语言那样须具体组织、分配存储器资源和处理端口必须要与单片机的存储结构相关联,否则编译器不能正 确地映射定位。
数据,但在C,C语言编写单片机应用程序时,需根据单片机存储结构及内部资源定义相应的数据类型和变量,而标准的C语言程序不需要考虑这些问题;C54包含的数据类型、变量存储模式、输入输出处理、函数等方面与标准的C语言有一定的区别。
其它的语法规则、程序结构及程序设计方法等与标准的C语言程序设计相同。
现在支持89C51系列单片机的C语言编译器有很多种,女0American Automation> Avocet、BSO/TASKING、DUNFIELD SHAREWARE>KEIL/Franklin等。