飞行程序设计实践步骤
- 格式:doc
- 大小:121.00 KB
- 文档页数:7
飞行程序设计概述飞行程序设计是指为飞行器编写程序,控制其飞行行为和执行任务。
飞行程序设计涉及到飞行器的导航、自动驾驶、飞行模式切换等功能,是飞行器能够完成各种任务的重要组成部分。
飞行程序设计原则在进行飞行程序设计时,需要遵循一些基本原则,以确保飞行器的安全和性能。
1. 模块化设计:将飞行程序分解为多个模块,每个模块负责完成特定的功能。
这样做可以提高程序的可维护性和可扩展性。
2. 容错设计:在程序中引入适当的容错机制,以应对可能出现的意外情况,如传感器故障、通信中断等。
容错设计可以增加飞行器的鲁棒性。
3. 优化算法:使用高效的算法来处理飞行器的导航和控制问题,以提高飞行器的性能和响应速度。
4. 人机交互设计:考虑到飞行程序的操作性和可用性,设计人机界面,使操作员可以方便地进行程序的设置和调整。
飞行程序设计流程飞行程序设计通常包括以下几个步骤:1. 需求分析:明确飞行器的任务和功能需求,确定需要实现的飞行程序功能。
2. 界面设计:设计人机界面,使操作员可以方便地进行程序的设置和调整。
3. 算法设计:设计飞行控制算法和导航算法,用于控制飞行器的姿态和路径。
4. 模块设计:将飞行程序分解为多个模块,并对每个模块进行详细设计。
5. 编码实现:根据设计完成对应的编码工作,实现飞行程序。
6. 调试优化:进行系统调试和优化工作,确保飞行程序的正确性和稳定性。
7. 测试验证:对飞行程序进行全面的测试验证,确保程序能够按照预期完成飞行任务。
飞行程序设计工具进行飞行程序设计时,可以使用一些专门的工具来辅助开发工作。
1. 集成开发环境(IDE):使用IDE可以提供代码编辑、调试、编译和运行等一体化的开发环境,提高开发效率。
2. 仿真工具:仿真工具可以模拟飞行器的运行环境,帮助进行飞行程序的调试和测试。
3. 数据分析工具:使用数据分析工具对飞行器的传感器数据和飞行记录进行分析,以评估飞行程序的性能和稳定性。
飞行程序设计的挑战飞行程序设计面临一些挑战,需要解决一些问题。
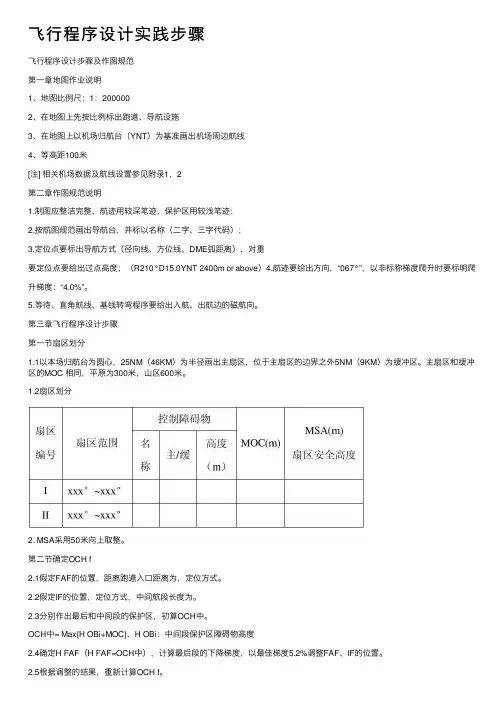
飞⾏程序设计实践步骤飞⾏程序设计步骤及作图规范第⼀章地图作业说明1、地图⽐例尺:1:2000002、在地图上先按⽐例标出跑道、导航设施3、在地图上以机场归航台(YNT)为基准画出机场周边航线4、等⾼距100⽶[注] 相关机场数据及航线设置参见附录1,2第⼆章作图规范说明1.制图应整洁完整,航迹⽤较深笔迹,保护区⽤较浅笔迹;2.按航图规范画出导航台,并标以名称(⼆字、三字代码);3.定位点要标出导航⽅式(径向线、⽅位线、DME弧距离),对重要定位点要给出过点⾼度;(R210°D15.0YNT 2400m or above)4.航迹要给出⽅向,“067°”,以⾮标称梯度爬升时要标明爬升梯度:“4.0%”。
5.等待、直⾓航线、基线转弯程序要给出⼊航、出航边的磁航向。
第三章飞⾏程序设计步骤第⼀节扇区划分1.1以本场归航台为圆⼼,25NM(46KM)为半径画出主扇区,位于主扇区的边界之外5NM(9KM)为缓冲区。
主扇区和缓冲区的MOC 相同,平原为300⽶,⼭区600⽶。
1.2扇区划分2. MSA采⽤50⽶向上取整。
第⼆节确定OCH f2.1假定FAF的位置,距离跑道⼊⼝距离为,定位⽅式。
2.2假定IF的位置,定位⽅式,中间航段长度为。
2.3分别作出最后和中间段的保护区,初算OCH中。
OCH中= Max{H OBi+MOC},H OBi:中间段保护区障碍物⾼度2.4确定H FAF(H FAF=OCH中),计算最后段的下降梯度,以最佳梯度5.2%调整FAF、IF的位置。
2.5根据调整的结果,重新计算OCH f。
OCH f= 。
[注] OCH f是制定机场运⾏标准的因素之⼀,也属于飞⾏程序设计⼯作的⼀⽅⾯,有兴趣的同学可以参阅《民航局第98号令》。
第三节初步设计离场、进场、进近⽅法及等待点的位置和等待⽅法。
(1)进场、离场航迹⽆冲突,航迹具有侧向间隔,或垂直间隔(低进⾼出);(2)仪表进场程序根据机场周围航线布局、导航布局以及进场⽅向,选择合适的进近⽅式,优先顺序为:直线进近,推测航迹,沿DME 弧进近,反向程序,直⾓航线;(3)注意进场航线设置与⼏种进近⽅式的衔接;(4)机场可以根据进场⽅向设置⼏个等待航线,等待位置尽可能与IAF点位置⼀致,但不强求;(5)合理规划导航台布局,最⼤限度地利⽤导航台资源。
飞行程序设计2飞行程序设计21. 引言在飞行程序设计中,我们需要考虑到各种飞行情况和条件,以确保飞行的安全和有效性。
本文将介绍一些飞行程序设计的关键方面,包括飞行计划、飞行指令和飞行保障等内容。
2. 飞行计划2.1 飞行任务分析在进行飞行计划之前,我们首先需要进行飞行任务分析。
这包括对飞行任务的目标、执行时间和空间限制进行详细的分析和评估,以确保飞行计划能够满足任务的要求。
2.2 飞行航线规划飞行航线规划是飞行计划中的关键步骤之一。
在进行航线规划时,我们需要考虑到飞行器的类型、飞行高度、飞行速度、气象条件等诸多因素。
同时,还需要考虑到空域管制、航路选择和航路容量等因素,以确保航线的安全和有效性。
2.3 飞行时间和燃油计算确定了飞行航线后,我们需要进行飞行时间和燃油的计算。
这需要考虑到飞机的性能参数、气象条件和航线长度等因素。
通过准确的计算,我们可以确定飞行的时间和燃油消耗量,以便进行后续的燃油准备和补给工作。
3. 飞行指令3.1 起飞指令在进行起飞操作时,飞行指令起到了至关重要的作用。
起飞指令包括了飞机的起飞方式、起飞航路和起飞高度等内容。
在制定起飞指令时,需要考虑到飞机的性能、气象条件和起飞场的限制等因素,以确保起飞的安全和有效性。
3.2 空中交通管制指令在飞行过程中,空中交通管制指令起到了关键的作用。
这些指令包括了飞行航路、高度和速度的调整等内容。
飞行员需要准确地执行这些指令,以确保飞行的安全和顺利进行。
3.3 降落指令降落指令是飞行中最后一个关键环节。
降落指令包括了降落航路、降落方式和着陆点等内容。
在制定降落指令时,需要考虑到飞机的性能、气象条件和着陆场的限制等因素,以确保降落的安全和有效性。
4. 飞行保障4.1 飞行器维护保障飞行器维护保障是飞行过程中的一个重要环节。
在飞行前,需要对飞机进行必要的检查和维护,以确保飞机的完好和正常运行。
同时,在飞行过程中,还需要注意对飞机进行安全监控,及时发现并处理任何潜在问题。
民航空管系统点融合飞行程序设计指南一、背景介绍近年来,随着航空业的迅速发展,民航交通量不断增加,航空运输成为重要的交通方式。
而民航空中交通管理系统的发展和完善也成为了航空业发展的重要方向之一。
其中,点融合飞行程序设计成为了民航空管系统发展的重要内容之一。
二、点融合飞行程序设计的概念点融合飞行程序设计是一种新的航空运输体系的设计方法,它以点为基础,通过设计合理的航线和航路点,实现飞机的精准导航和飞行控制。
点融合飞行程序设计将航空交通管理与航空运输交通管理相结合,通过合理的点融合设计,提高了航空交通的效率和安全性。
三、点融合飞行程序设计的意义1. 提高了民航空管系统的效率和安全性点融合飞行程序设计通过合理的点融合设计,提高了飞行控制的精准度,减少了飞机的飞行时间和能耗,提高了民航空管系统的效率和安全性。
2. 降低了航空交通管理的成本点融合飞行程序设计通过优化航空交通管理系统,减少了航空交通管理的成本,降低了企业的运营成本,提高了企业的竞争力。
3. 推动了航空业的发展点融合飞行程序设计促进了航空业的发展,提高了航空运输的效率和安全性,提高了航空业的服务水平和竞争力。
四、点融合飞行程序设计的原则1. 安全第一在点融合飞行程序设计中,安全应该是首要考虑的因素,所有的设计都应该以确保航空运输的安全为前提。
2. 效率优先点融合飞行程序设计应该以提高航空运输的效率为目标,通过合理的点融合设计,实现航空运输的高效、准确和安全。
3. 环保节能点融合飞行程序设计应该考虑到环境保护和节能减排的要求,通过优化飞行路线和航空管理系统,减少飞行能耗和环境污染。
五、点融合飞行程序设计的关键技术1. 点融合的航线设计技术点融合的航线设计技术是点融合飞行程序设计的核心技术之一,它涉及到航线的选取和航路点的设置,通过合理的航线设计,实现飞行控制的精准导航和飞行控制。
2. 航空管理技术的优化航空管理技术的优化是点融合飞行程序设计的关键技术之一,它涉及到航空管理系统的优化和改进,通过合理的航空管理技术的优化,提高了航空交通管理系统的效率和安全性。
![飞行程序设计[1]](https://uimg.taocdn.com/8805e7c0f605cc1755270722192e453611665b42.webp)
飞行程序设计飞行程序设计简介飞行程序设计是指在飞行器(如飞机、无人机等)中运行的程序的设计和开发。
随着航空技术和计算机技术的发展,飞行程序设计在航空航天领域中扮演着重要的角色。
本文将介绍飞行程序设计的基本概念、流程和工具,帮助初学者了解飞行程序设计的基本知识。
概述飞行程序设计是将计算机程序应用于飞机控制、导航、通信和飞行器系统管理等方面。
飞行程序设计需要考虑飞行器的特点、飞行环境以及飞行任务的需求。
一个有效的飞行程序能够提高飞行器的性能、安全性和可靠性。
设计流程飞行程序设计的一般流程如下:1. 需求分析:明确飞行任务的需求和约束条件,确定程序设计的目标。
2. 高层设计:根据需求分析,设计程序的整体架构和功能模块。
3. 详细设计:对程序的每个功能模块进行详细设计,包括算法选择、数据结构定义等。
4. 编码实现:根据详细设计,使用编程语言将程序实现。
5. 调试测试:进行程序的调试和测试,确保程序能够正确运行。
6. 验证验证:验证程序的正确性和性能是否满足需求,并进行优化和改进。
7. 部署运行:将程序部署到飞行器中,并进行实际飞行测试。
设计工具在飞行程序设计中,有许多工具可以辅助设计和开发工作。
以下是一些常用的设计工具:- UML建模工具:用于绘制程序的结构图、行为图和交互图等,如Visio、Enterprise Architect等。
- 集成开发环境(IDE):用于编写、调试和测试程序代码,如Eclipse、Visual Studio等。
- 仿真软件:用于模拟飞行环境和飞行器行为,如FlightGear、Prepar3D等。
- 静态代码分析工具:用于发现和修复代码中的潜在问题,如Cppcheck、Pylint等。
- 版本管理工具:用于管理程序代码的版本和变更,如Git、SVN等。
- 编辑器:用于编辑和查看程序源代码,如Sublime Text、Notepad++等。
常见挑战和解决方案在飞行程序设计过程中,常常面临一些挑战。
飞行程序设计PBN课程设计一、教学目标本课程旨在通过飞行程序设计PBN(性能基准导航)的教学,让学生掌握PBN 的基本概念、原理和应用。
在知识目标方面,学生需要理解PBN的基本原理,熟悉PBN的运行标准和程序设计方法。
在技能目标方面,学生需要能够运用PBN原理进行基本的飞行程序设计,并能对设计结果进行分析和评估。
在情感态度价值观目标方面,学生通过本课程的学习,应该增强对飞行安全的重视,培养严谨的科学态度和良好的职业操守。
二、教学内容本课程的教学内容主要包括PBN的基本概念、PBN的运行标准、PBN的程序设计方法以及PBN的设计结果分析。
具体来说,学生需要通过学习了解PBN的定义、发展历程和应用领域;熟悉PBN的运行标准,包括性能要求、程序设计和评估要求;掌握PBN的程序设计方法,包括设计原理、设计流程和设计工具;并能对设计结果进行分析和评估。
三、教学方法为了达到本课程的教学目标,将采用多种教学方法,包括讲授法、案例分析法和实验法。
通过讲授法,向学生传授PBN的基本概念和原理;通过案例分析法,让学生深入了解PBN的应用和设计过程;通过实验法,让学生亲手操作,提高学生的实际操作能力。
同时,将鼓励学生积极参与讨论,提高学生的思考能力和创新能力。
四、教学资源为了支持本课程的教学内容和教学方法的实施,将准备相应的教学资源。
教材方面,将选用权威、实用的教材,为学生提供全面、系统的学习资料;参考书方面,将提供相关的学术文献和行业规范,为学生提供深入、前沿的学习资源;多媒体资料方面,将制作相关的教学视频和演示文稿,为学生提供生动、直观的学习材料;实验设备方面,将配置相关的实验器材,为学生提供实践、操作的学习环境。
五、教学评估为了全面、客观地评估学生在飞行程序设计PBN课程中的学习成果,将采用多种评估方式。
平时表现方面,将根据学生在课堂上的参与度、提问和回答问题的情况进行评估;作业方面,将根据学生提交的作业质量和完成情况进行评估;考试方面,将设置期中和期末考试,全面测试学生的知识掌握和应用能力。
飞行程序设计PBN课程设计一、课程目标知识目标:1. 理解飞行程序设计PBN的基本概念,掌握其定义、分类及组成要素;2. 学习并掌握PBN导航规范,包括RNAV、RNP等基本知识;3. 了解飞行程序设计中的航路规划、飞行参数计算等相关知识。
技能目标:1. 能够运用PBN知识,进行简单的飞行程序设计;2. 掌握使用飞行导航设备,进行航路规划和飞行参数计算;3. 提高分析问题和解决问题的能力,能够针对特定飞行场景,提出合理的飞行程序设计方案。
情感态度价值观目标:1. 培养学生对航空事业的热爱和责任感,增强对飞行安全意识的认识;2. 培养学生的团队协作精神和沟通能力,学会在团队中分享和交流;3. 培养学生严谨的科学态度和自主学习能力,激发探索航空领域的兴趣。
分析课程性质、学生特点和教学要求,本课程目标旨在使学生在掌握飞行程序设计PBN知识的基础上,提高实际操作能力和综合素质,为今后从事航空领域工作打下坚实基础。
通过本课程的学习,学生将能够达到上述具体的学习成果。
二、教学内容1. 飞行程序设计PBN基本概念:包括PBN的定义、分类及组成要素,以及其在航空领域中的应用。
教材章节:第一章 PBN概述2. RNAV和RNP导航规范:学习RNAV和RNP的基本概念、导航规范及其在飞行程序设计中的应用。
教材章节:第二章 RNAV与RNP导航规范3. 航路规划与飞行参数计算:介绍航路规划的基本原则,学习飞行参数计算方法,并进行实际案例分析。
教材章节:第三章 航路规划与飞行参数计算4. 飞行程序设计实例分析:分析典型飞行场景下的飞行程序设计,包括起飞、巡航、下降和着陆等阶段。
教材章节:第四章 飞行程序设计实例分析5. 飞行程序设计实践操作:结合模拟飞行软件,进行飞行程序设计操作练习,巩固所学知识。
教材章节:第五章 飞行程序设计实践操作教学内容安排和进度:1. 前四章节内容各分配2课时,共计8课时;2. 第五章节实践操作部分,分配4课时;3. 整个教学内容共计12课时,确保学生充分掌握PBN飞行程序设计的相关知识。
飞行程序设计2飞行程序设计2概述基本原理飞行程序设计2的基本原理是将飞机的动力学模型与控制系统相结合,以实现对飞机飞行状态的精确控制。
该方法利用飞机动力学模型描述飞机的运动特性,通过设计控制算法来实现对飞机的控制。
这种基于模型的设计方法可以提高飞机的飞行性能和安全性。
设计流程飞行程序设计2的设计流程包括以下步骤:1. 飞机模型建立:根据飞机的物理特性和控制要求,建立飞机的动力学模型。
这个模型将描述飞机的运动特性,包括飞行姿态、空气动力学特性等。
2. 控制系统设计:根据飞机的动力学模型,设计飞机的控制系统。
这个控制系统将包括传感器、执行器和控制算法等组件,用于实现对飞机的控制。
3. 控制算法实现:将设计好的控制算法实现为计算机程序。
在这一步中,需要考虑到实时性、稳定性和准确性等因素,确保控制算法能够满足飞机的控制要求。
4. 系统集成:将设计好的控制系统集成到飞机中进行。
在这一步中,需要控制系统的性能和稳定性,确保飞机可以按照预期的方式进行飞行。
5. 系统优化:根据结果对设计进行优化。
在这一步中,可以通过调整控制算法的参数或改进控制系统的结构来提高飞机的飞行性能。
注意事项在进行飞行程序设计2时,需要注意以下事项:对飞机模型的建立要准确可靠,需要考虑到飞机的物理特性和控制要求。
控制系统设计要合理,考虑到传感器和执行器的限制条件,确保飞机的安全性和性能。
控制算法的实现要符合实时性、稳定性和准确性的要求,能够满足飞机的控制要求。
在进行系统集成时,要对控制系统进行全面的性能和稳定性,确保飞机可以按照预期的方式进行飞行。
在进行系统优化时,要仔细分析结果,根据实际情况对设计进行优化,提高飞机的飞行性能。
结论。
飞行程序设计报告指导教师:李昂组员:090441834 俞学森090441835 张浩一、扇区划分1.1以本场归航台为圆心,25NM(46KM)为半径画出主扇区,位于主扇区的边界之外5NM(9KM)为缓冲区。
主扇区和缓冲区的MOC 相同,平原为300米,山区600米。
1.2扇区划分扇区编号扇区范围控制障碍物MOC(m)MSA(m)扇区安全高度主/缓高度(m)I 0°~160°缓1796 600 2396 II 160°~215°缓2038 600 2638215°~250°主1306 600 1906 250°~360°缓1902 600 2502 注:1. 高度为海压高,增加15米树高。
二、确定离场程序一、第一条离场航线ty_1d一、根据障碍物分布和空域情况确定使用转弯离场方式选择指定点离场二、确定航迹引导台ABC台;三、有推测航迹,长度8 KM;四、计算转弯参数H(可能的最大值)=机场标高+ 5 + 10% ×d=785+5+10%×3500=1140K=1.1406(1500m)TAS=IAS×K=559R=(562tgα)/v=562*tg15o/(559/3.6)=0.97(°/s)r=180v/∏R=(180×(559/3.6))/(3.14×0.97)=9.2(km)C=(TAS+W)×6=(559+56)/3.6×6=1025(m)E90=(90/ R )×W=1.45(km)机型IAS(m/s) K(1500m)TAS(m/s)TA/H(转弯高度/高) (m)R(°/s)r (km) E90 CC类490 1.1406 559 1140 0.97 8.2 1.45 1025 五、画出航迹:在跑道延长线上画出3500米,然后转弯121度,以60度角切入航线。
飞行控制律设计流程
一、系统建模
1.飞行器动力学建模
(1)确定飞行器类型
(2)撰写飞行器数学模型
2.传感器建模
(1)确定传感器类型
(2)建立传感器数学模型
二、控制需求分析
1.确定控制目标
(1)设定飞行器期望轨迹
(2)确定稳定性要求
2.系统性能要求
(1)设定响应时间要求
(2)确定控制精度要求
三、控制器设计
1.控制器类型选择
(1)PID控制器
(2)模糊控制器
2.控制器参数调整
(1)初始参数设定
(2)仿真调试
四、系统仿真
1.搭建仿真环境
(1)导入飞行器模型
(2)设定仿真条件
2.进行仿真实验
(1)执行控制器设计
(2)分析仿真结果
五、调试与验证
1.硬件实验验证
(1)在实际飞行器上进行控制器验证(2)收集实验数据
2.性能评估
(1)分析实验数据
(2)评估控制器性能
六、控制器优化
1.反馈调整
(1)根据实验结果调整控制器参数
(2)优化控制器性能
2.系统稳定性分析
(1)进行稳定性分析
(2)调整控制策略
七、上线部署
1.飞行控制器集成
(1)将优化后的控制器集成到飞行系统中(2)进行系统测试
2.系统上线
(1)部署控制器到实际飞行任务中
(2)监控系统运行状态。
飞行程序设计飞行程序设计简介飞行程序设计用于指导和控制飞行器进行各种航行任务。
它是飞行器的核心控制系统,通过编写程序,实现飞行器的自主飞行、遥控操作、自动驾驶等功能。
本文将介绍飞行程序设计的基本原理和常用技术。
程序设计原理飞行程序设计的原理是将任务分解为一系列指令,通过控制飞行器的各个部件,实现飞行器在空中的运动。
程序设计的主要原理包括:1. 控制流程设计:确定飞行器的基本运动流程,包括起飞、巡航、降落等。
针对不同任务,可以设计不同的控制流程,以适应不同的飞行需求。
2. 传感器数据处理:通过传感器收集环境数据,包括飞行器的姿态、位置、速度等信息。
程序需要对传感器数据进行处理和解析,以实现对飞行器的精确控制。
3. 算法设计:根据飞行任务的需求,设计相应的算法来实现飞行器的自主飞行和遥控操作。
常用的算法包括PID控制、路径规划、避障算法等。
程序设计技术飞行程序设计涉及多种技术和工具,以下是常用的技术和工具:1. 语言选择:常见的飞行程序设计语言包括C/C++、Python等。
不同语言具有不同的特点,根据项目需求和开发人员的熟悉程度选择适合的语言。
2. 软件框架:使用飞行程序设计框架可以加快开发进度。
主流框架包括PX4、ArduPilot等,它们提供了丰富的功能和接口,方便开发者进行飞行程序设计。
3. 模拟器:飞行程序设计阶段可以使用模拟器进行测试和调试。
模拟器可以模拟真实的飞行环境,提供飞行器的动力学模型和传感器数据,方便开发者进行程序验证和优化。
4. 硬件平台:选择合适的硬件平台也是飞行程序设计的重要步骤。
常见的硬件平台包括无人机、飞行器、遥控器等。
选择合适的硬件平台可以提高飞行器的性能和稳定性。
开发流程飞行程序设计的开发流程一般包括以下步骤:1. 需求分析:明确飞行任务的需求和功能要求,确定飞行器的基本控制流程。
2. 系统设计:根据需求分析的结果,设计飞行程序的系统架构和模块。
3. 编码实现:根据系统设计的结果,使用所选的编程语言编写飞行程序代码。
飞行程序设计步骤及作图规范
第一章地图作业说明
1、地图比例尺:1:200000
2、在地图上先按比例标出跑道、导航设施
3、在地图上以机场归航台(YNT)为基准画出机场周边航线
4、等高距100米
[注] 相关机场数据及航线设置参见附录1,2
第二章作图规范说明
1.制图应整洁完整,航迹用较深笔迹,保护区用较浅笔迹;
2.按航图规范画出导航台,并标以名称(二字、三字代码);
3.定位点要标出导航方式(径向线、方位线、DME弧距离),对重
要定位点要给出过点高度;(R210°D15.0YNT 2400m or above)4.航迹要给出方向,“067°”,以非标称梯度爬升时要标明爬
升梯度:“4.0%”。
5.等待、直角航线、基线转弯程序要给出入航、出航边的磁航向。
第三章飞行程序设计步骤
第一节扇区划分
1.1以本场归航台为圆心,25NM(46KM)为半径画出主扇区,位于主扇区的边界之外5NM(9KM)为缓冲区。
主扇区和缓冲区的MOC 相同,平原为300米,山区600米。
1.2扇区划分
2. MSA采用50米向上取整。
第二节确定OCH f
2.1假定FAF的位置,距离跑道入口距离为,定位方式。
2.2假定IF的位置,定位方式,中间航段长度为。
2.3分别作出最后和中间段的保护区,初算OCH中。
OCH中= Max{H OBi+MOC},H OBi:中间段保护区障碍物高度
2.4确定H FAF(H FAF=OCH中),计算最后段的下降梯度,以最佳梯度5.2%调整FAF、IF的位置。
2.5根据调整的结果,重新计算OCH f。
OCH f= 。
[注] OCH f是制定机场运行标准的因素之一,也属于飞行程序设计工作的一方面,有兴趣的同学可以参阅《民航局第98号令》。
第三节初步设计离场、进场、进近方法及等待点的位置和等待方法。
(1)进场、离场航迹无冲突,航迹具有侧向间隔,或垂直间隔(低进高出);
(2)仪表进场程序根据机场周围航线布局、导航布局以及进场方向,选择合适的进近方式,优先顺序为:直线进近,推测航迹,沿DME 弧进近,反向程序,直角航线;
(3)注意进场航线设置与几种进近方式的衔接;
(4)机场可以根据进场方向设置几个等待航线,等待位置尽可能与IAF点位置一致,但不强求;
(5)合理规划导航台布局,最大限度地利用导航台资源。
第四节仪表离场程序设计
首先根据机场周边航线分布,确定各个方向的离场方式(直线/转弯);
4.1直线离场:
4.1.1航迹引导台;
4.1.2有无推测航迹,长度KM;
4.1.3确定保护区;
4.1.4对保护区内障碍物进行评估
4.2转弯离场
4.2.1根据障碍物分布和空域情况确定使用转弯离场方式(指定点/指定高度)
4.2.2确定航迹引导台;
4.2.3有无推测航迹,长度KM;
4.2.4计算转弯参数
4.2.6根据标称航迹确定保护区;
4.2.7对保护区内障碍物进行评估
各个方向离场方式描述。
(描述离场方式、方向,使用的定位点信息、高度等)
[注1]离场加入航路时航空器航迹改变角度≤60°;
[注2]根据离场梯度和离场航迹的长度计算出加入航路的最低高度。
第五节进场与起始进近航段设计
各个方向进场方式描述。
(描述各个方向进场方向、方式,以及使用的定位点、高度等)
5.1根据进近方式和中间进近方向确定IAF的位置,画出进场航段保护区(尽量与离场保护区不重叠),计算进场航段OCH= ,(进场OCH = Max{H OBi+MOC},H OBi:进场段保护区障碍物高度)。
IAF定位信息为;
障碍物情况表:
5.2IAF IAF
与MSA一致)。
H IAF= ;
5.3画出起始进近保护区,并检查起始进近保护区与离场航段保护区是否重叠。
如不符合规定,对进场航迹应进行调整,并重复有关设计步骤。
5.4计算OCH起;检查起始进近航段梯度,如不符合规定,应调整起
始进近航迹,并重复1-3三个步骤。
;
起=
起始段梯度= ,梯度范围:。
5.5根据IAF位置,重新确定中间航段保护区,并计算OCH中。
5.6
航迹,并重复5.1至5.5五个步骤。
OCH中= ;
中间段梯度= ,最大梯度:。
[注1]进场与离场航迹尽可能保持侧向间隔,若不能满足必须有足够的垂直间隔。
第六节复飞航段设计
复飞航段描述。
Mapt定位信息,距离跑道入口的距离。
复飞参数计算:
6.1
6.2检查起始复飞障碍物,不满足超障要求则进行调整,重复1-3步。
6.3
6.5检查复飞障碍物,如不符合规定,须进行必要的调整。
如果调整
了转弯点及转弯高度,应重复步骤3至5。
6.7画出等待保护区。
6.8检查与进场、进近保护区是否有足够的间隔,如果间隔不够,应调整等待点的位置或调整进近航迹。
如果调整了进近航迹,则须从第5节进场与起始进近航段设计重新设计;如果调整了等待点,则重复第6.7和6.8步。