2. G为比例放大时,实现无差调节的条件 xo=Gxe
设为稳定输出
若无差调节,则xe为0
要求G→∞
传递函数
H
lGim 1
G GF
1 F
3. G为比例放大时的系统调节误差
理想情况下 (G→∞) 系统稳态输出无偏差
xi +
H
1 F
==
H0
xe
G
xo
xf F
系统的环路增益
实际情况下 (G为有限值)
U
电动机
n
线性检测环节F
电动机的传递特性: K n/U 50
ux=3V ue=ux-uf 2 基本功能
n=3000rpm
uf=0.001n
>0, Uf <3V, n<3000rpm, U↑ =0, Uf =3V, n=3000rpm, U=60V
<0, Uf >3V, n>3000rpm, U↓
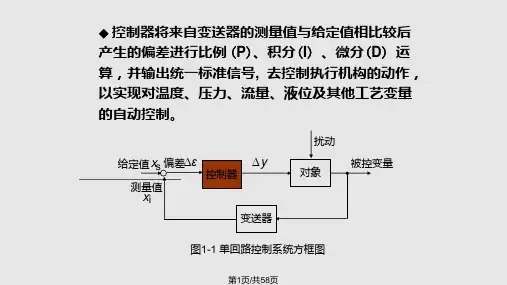
偏差e 自动调节 调节
F=0.001 n↑
n=3000rpm n↓
3 研究核心
• 稳态精度分析
• 动态特性分析
• 稳定性分析
• 特性的补偿
9.2 控制系统的稳态特性分析
在稳定状态下,系统的实际输出达到期望输出的精确程度
1. 无差调节 (精度达100%的系统)
xi + xe
G
xf
xo
F
若实际输出=期望输出, xf=xi , xe=xi -xf =0
200
功率放大器
10
直流电动机
50 s/51
被控参数 Y(s)
1) 传递函数
0.001V/rpm