实验六 计算机控制系统的数字仿真
- 格式:pdf
- 大小:118.95 KB
- 文档页数:3

《计算机控制技术》数字PID控制器设计与仿真实验报告课程名称:计算机控制技术实验实验类型:设计型实验项目名称:数字PID控制器设计与仿真一、实验目的和要求1. 学习并掌握数字PID以及积分分离PID控制算法的设计原理及应用。
2. 学习并掌握数字PID控制算法参数整定方法。
二、实验内容和原理图3-1图3-1是一个典型的 PID 闭环控制系统方框图,其硬件电路原理及接线图可设计如图1-2所示。
图3-2中画“○”的线需用户在实验中自行接好,对象需用户在模拟实验平台上的运放单元搭接。
图3-2上图中,ADC1为模拟输入,DAC1为模拟输出,“DIN0”是C8051F管脚 P1.4,在这里作为输入管脚用来检测信号是否同步。
这里,系统误差信号E通过模数转换“ADC1”端输入,控制机的定时器作为基准时钟(初始化为10ms),定时采集“ADC1”端的信号,得到信号E的数字量,并进行PID计算,得到相应的控制量,再把控制量送到控制计算机及其接口单元,由“DAC1”端输出相应的模拟信号,来控制对象系统。
本实验中,采用位置式PID算式。
在一般的PID控制中,当有较大的扰动或大幅度改变给定值时,会有较大的误差,以及系统有惯性和滞后,因此在积分项的作用下,往往会使系统超调变大、过渡时间变长。
为此,可采用积分分离法PID控制算法,即:当误差e(k)较大时,取消积分作用;当误差e(k)较小时才将积分作用加入。
图3-3是积分分离法PID控制实验的参考程序流程图。
图3-3三、主要仪器设备计算机、模拟电气实验箱四、操作方法与实验步骤1.按照图3-2搭建实验仿真平台。
2.确定系统的采样周期以及积分分离值。
3.参考给出的流程图编写实验程序,将积分分离值设为最大值0x7F,编译、链接。
4.点击,使系统进入调试模式,点击,使系统开始运行,用示波器分别观测输入端R以及输出端C。
5.如果系统性能不满意,用凑试法修改PID参数,再重复步骤3和4,直到响应曲线满意,并记录响应曲线的超调量和过渡时间。

pid控制实验报告pid控制实验报告篇一:PID控制实验报告实验二数字PID控制计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量。
因此连续PID控制算法不能直接使用,需要采用离散化方法。
在计算机PID控制中,使用的是数字PID控制器。
一、位置式PID控制算法按模拟PID控制算法,以一系列的采样时刻点kT代表连续时间t,以矩形法数值积分近似代替积分,以一阶后向差分近似代替微分,可得离散PID位置式表达式:?Tu T ?kpeu=para; J=0.0067;B=0.1; d=zeros= = -+ = k*ts; %time中存放着各采样时刻rineu_1=uerror_1=error;%误差信号更新图2-1 Simulink仿真程序其程序运行结果如表2所示。
Matlab输出结果errori =error_1 = 表2 例4程序运行结果三、离散系统的数字PID控制仿真1.Ex5 设被控对象为G?num 仿真程序:ex5.m%PID Controller lear all; lose all;篇二:自动控制实验报告六-数字PID控制实验六数字PID控制一、实验目的1.研究PID控制器的参数对系统稳定性及过渡过程的影响。
2.研究采样周期T对系统特性的影响。
3.研究I型系统及系统的稳定误差。
二、实验仪器1.EL-AT-III型自动控制系统实验箱一台2.计算机一台三、实验内容1.系统结构图如6-1图。
图6-1 系统结构图图中 G(s)=Kp(1+Kis+Kds) GhGp1(s)=5((0.5s+1)(0.1s+1)) Gp2(s)=1(s(0.1s+1))-TS 2.开环系统(被控制对象)的模拟电路图如图6-2和图6-3,其中图6-2对应GP1(s),图6-3对应Gp2(s)。
图6-2 开环系统结构图1 图6-3开环系统结构图2 3.被控对象GP1(s)为“0型”系统,采用PI控制或PID控制,可使系统变为“I型”系统,被控对象Gp2(s)为“I型”系统,采用PI控制或PID控制可使系统变成“II型”系统。
《MATLAB与控制系统仿真》实验报告一、实验目的本实验旨在通过MATLAB软件进行控制系统的仿真,并通过仿真结果分析控制系统的性能。
二、实验器材1.计算机2.MATLAB软件三、实验内容1.搭建控制系统模型在MATLAB软件中,通过使用控制系统工具箱,我们可以搭建不同类型的控制系统模型。
本实验中我们选择了一个简单的比例控制系统模型。
2.设定输入信号我们需要为控制系统提供输入信号进行仿真。
在MATLAB中,我们可以使用信号工具箱来产生不同类型的信号。
本实验中,我们选择了一个阶跃信号作为输入信号。
3.运行仿真通过设置模型参数、输入信号以及仿真时间等相关参数后,我们可以运行仿真。
MATLAB会根据系统模型和输入信号产生输出信号,并显示在仿真界面上。
4.分析控制系统性能根据仿真结果,我们可以对控制系统的性能进行分析。
常见的性能指标包括系统的稳态误差、超调量、响应时间等。
四、实验步骤1. 打开MATLAB软件,并在命令窗口中输入“controlSystemDesigner”命令,打开控制系统工具箱。
2.在控制系统工具箱中选择比例控制器模型,并设置相应的增益参数。
3.在信号工具箱中选择阶跃信号,并设置相应的幅值和起始时间。
4.在仿真界面中设置仿真时间,并点击运行按钮,开始仿真。
5.根据仿真结果,分析控制系统的性能指标,并记录下相应的数值,并根据数值进行分析和讨论。
五、实验结果与分析根据运行仿真获得的结果,我们可以得到控制系统的输出信号曲线。
通过观察输出信号的稳态值、超调量、响应时间等性能指标,我们可以对控制系统的性能进行分析和评价。
六、实验总结通过本次实验,我们学习了如何使用MATLAB软件进行控制系统仿真,并提取控制系统的性能指标。
通过实验,我们可以更加直观地理解控制系统的工作原理,为控制系统设计和分析提供了重要的工具和思路。
七、实验心得通过本次实验,我深刻理解了控制系统仿真的重要性和必要性。
MATLAB软件提供了强大的仿真工具和功能,能够帮助我们更好地理解和分析控制系统的性能。
一、实验目的1. 理解计算机控制系统的基本原理和组成;2. 掌握计算机控制系统的基本操作和调试方法;3. 通过实验,加深对计算机控制理论的理解和应用。
二、实验仪器1. PC计算机一台;2. 计算机控制系统实验箱一台;3. 传感器、执行器等实验设备。
三、实验内容1. 计算机控制系统组成与原理;2. 传感器信号采集与处理;3. 执行器控制与调节;4. 计算机控制系统调试与优化。
四、实验步骤1. 熟悉实验设备,了解计算机控制系统实验箱的组成及功能;2. 连接实验设备,检查无误后启动实验软件;3. 根据实验要求,进行传感器信号采集与处理;4. 根据实验要求,进行执行器控制与调节;5. 对计算机控制系统进行调试与优化,观察系统响应和性能;6. 记录实验数据,分析实验结果。
五、实验结果与分析1. 计算机控制系统组成与原理实验过程中,我们了解了计算机控制系统的基本组成,包括传感器、控制器、执行器等。
传感器用于采集被控对象的物理量,控制器根据采集到的信号进行计算、处理,然后输出控制信号给执行器,执行器对被控对象进行调节。
2. 传感器信号采集与处理在实验中,我们使用了温度传感器采集环境温度信号。
通过实验,我们掌握了如何将模拟信号转换为数字信号,以及如何对采集到的信号进行滤波处理。
3. 执行器控制与调节实验中,我们使用了继电器作为执行器,根据控制器输出的控制信号进行开关控制。
通过实验,我们学会了如何设置执行器的参数,以及如何对执行器进行调节。
4. 计算机控制系统调试与优化在实验过程中,我们对计算机控制系统进行了调试与优化。
通过调整控制器参数,使得系统在满足控制要求的同时,具有良好的动态性能和稳态性能。
六、实验总结本次实验使我们对计算机控制系统有了更深入的了解,掌握了计算机控制系统的基本原理和操作方法。
通过实验,我们提高了动手能力和实际操作能力,为今后从事相关领域工作奠定了基础。
七、实验报告1. 实验名称:计算机控制系统实验2. 实验日期:XXXX年XX月XX日3. 实验人员:XXX、XXX4. 实验指导教师:XXX5. 实验内容:计算机控制系统组成与原理、传感器信号采集与处理、执行器控制与调节、计算机控制系统调试与优化6. 实验结果与分析:详细描述实验过程中遇到的问题、解决方法及实验结果7. 实验心得体会:总结实验过程中的收获和体会(注:以上实验报告仅供参考,具体实验内容和结果可能因实际情况而有所不同。

数字系统设计及实验实验报告一、实验目的数字系统设计及实验课程旨在让我们深入理解数字逻辑的基本概念和原理,掌握数字系统的设计方法和实现技术。
通过实验,我们能够将理论知识应用于实际,提高解决问题的能力和实践动手能力。
本次实验的具体目的包括:1、熟悉数字电路的基本逻辑门、组合逻辑电路和时序逻辑电路的设计方法。
2、掌握使用硬件描述语言(如 Verilog 或 VHDL)进行数字系统建模和设计。
3、学会使用相关的电子设计自动化(EDA)工具进行电路的仿真、综合和实现。
4、培养团队合作精神和工程实践能力,提高解决实际问题的综合素质。
二、实验设备和工具1、计算机:用于编写代码、进行仿真和综合。
2、 EDA 软件:如 Quartus II、ModelSim 等。
3、实验开发板:提供硬件平台进行电路的下载和测试。
4、数字万用表、示波器等测量仪器:用于检测电路的性能和信号。
三、实验内容1、基本逻辑门电路的设计与实现设计并实现与门、或门、非门、与非门、或非门和异或门等基本逻辑门电路。
使用 EDA 工具进行仿真,验证逻辑功能的正确性。
在实验开发板上下载并测试实际电路。
2、组合逻辑电路的设计与实现设计一个 4 位加法器,实现两个 4 位二进制数的相加。
设计一个编码器和译码器,实现数字信号的编码和解码。
设计一个数据选择器,根据控制信号选择不同的输入数据。
3、时序逻辑电路的设计与实现设计一个同步计数器,实现模 10 计数功能。
设计一个移位寄存器,实现数据的移位存储功能。
设计一个有限状态机(FSM),实现简单的状态转换和控制逻辑。
四、实验步骤1、设计方案的确定根据实验要求,分析问题,确定电路的功能和性能指标。
选择合适的逻辑器件和设计方法,制定详细的设计方案。
2、代码编写使用硬件描述语言(如 Verilog 或 VHDL)编写电路的代码。
遵循代码规范,注重代码的可读性和可维护性。
3、仿真验证在 EDA 工具中对编写的代码进行仿真,输入不同的测试向量,观察输出结果是否符合预期。
实验1 闭环控制系统仿真实验——PID 控制算法仿真一、实验目的1.掌握PID 控制规律及控制器实现。
2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。
二、实验设备计算机、MATLAB 软件 三、实验原理在模拟控制系统中,控制器中最常用的控制规律是PID 控制。
PID 控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差。
PID 控制规律写成传递函数的形式为s K sKiK s T s T K s U s E s G d p d i p ++=++==)11()()()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;ip i K K T =为积分时间常数;pdd K K T =为微分时间常数;简单来说,PID 控制各校正环节的作用如下:(1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
(2)积分环节:主要用于消除静差,提高系统的无差度。
积分作用的强弱取决于积分时间常数i T ,i T 越大,积分作用越弱,反之则越强。
(3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
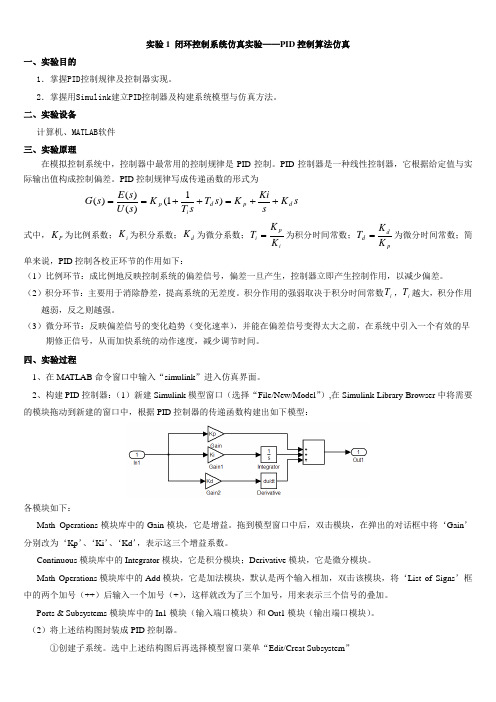
四、实验过程1、在MA TLAB 命令窗口中输入“simulink ”进入仿真界面。
2、构建PID 控制器:(1)新建Simulink 模型窗口(选择“File/New/Model ”),在Simulink Library Browser 中将需要的模块拖动到新建的窗口中,根据PID 控制器的传递函数构建出如下模型:各模块如下:Math Operations 模块库中的Gain 模块,它是增益。
拖到模型窗口中后,双击模块,在弹出的对话框中将‘Gain ’分别改为‘Kp ’、‘Ki ’、‘Kd ’,表示这三个增益系数。
Continuous 模块库中的Integrator 模块,它是积分模块;Derivative 模块,它是微分模块。
江南大学物联网工程学院《计算机控制系统》实验报告实验名称实验六达林算法控制仿真实验实验时间2017.12.1专业电气工程及其自动化班级电气1401 姓名林谷烨学号1070114107 指导教师陈珺实验成绩一、实验目的与要求1、掌握达林算法的D(z)设计。
2、掌握SIMULINK的仿真方法。
二、仿真软硬件环境PC机,MATLAB R2012b。
三、实验原理如图延时一拍由采样保持器滞后一拍输入模拟量实现。
四、D(z)设计已知:10() , T0.2 s , R(t)1(t)1TseG ss-===+;达林设计目标定为:()1TsesT sτΦ-=+,Tτ=0.1s。
则广义对象的脉冲传函()G z=120.81911.813---zz闭环系统的脉冲传函()zΦ=120.135-10.865z--z数字控制器()D z=()()()111z-10.865z1819.1477.---+-z五、SIMULINK仿真结构图+ ○R数单位阶跃输入单位斜坡输入七、思考题1、达林算法控制系统对阶跃输入有无超调?为什么?答:达林算法控制系统对阶跃输入有超调。
因为被控对象中的纯滞后部分仅将控制作用在时间坐标上推移了一个滞后时间,被控对象具有纯滞后特性,时间常数很大,而被控对象的滞后时间会使系统的稳定性降低,动态性能变坏,即会引起超调和持续的振荡,因而达林算法控制系统对阶跃信号也有一定的超调。
2、达林算法与PID 算法有什么本质区别?① 达林算法:由于对象存在较大的纯滞后,采用单回路PID 控制效果不佳。
但常规单回路PID 控制对一般对象控制效果较为理想,是生产过程中常用的一种控制方法。
②PID 控制:比例控制能迅速反应误差,从而减小稳态误差。
但是,比例控制能消除稳态误差。
比例放大系数的加大,会引起系统的不稳定。
积分控制,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。
但是积分作用太强会使系统超调加大,甚至使系统出现振荡。
控制系统仿真实验报告一、实验目的本次控制系统仿真实验的主要目的是通过使用仿真软件对控制系统进行建模、分析和设计,深入理解控制系统的工作原理和性能特点,掌握控制系统的分析和设计方法,提高解决实际控制问题的能力。
二、实验设备与软件1、计算机一台2、 MATLAB 仿真软件三、实验原理控制系统是由控制对象、控制器和反馈环节组成的一个闭环系统。
其工作原理是通过传感器测量控制对象的输出,将其与期望的输出进行比较,得到误差信号,控制器根据误差信号产生控制信号,驱动控制对象,使系统的输出逐渐接近期望的输出。
在仿真实验中,我们使用数学模型来描述控制对象和控制器的动态特性。
常见的数学模型包括传递函数、状态空间方程等。
通过对这些数学模型进行数值求解,可以得到系统的输出响应,从而对系统的性能进行分析和评估。
四、实验内容1、一阶系统的仿真建立一阶系统的数学模型,如一阶惯性环节。
使用 MATLAB 绘制系统的单位阶跃响应曲线,分析系统的响应时间和稳态误差。
2、二阶系统的仿真建立二阶系统的数学模型,如典型的二阶振荡环节。
改变系统的阻尼比和自然频率,观察系统的阶跃响应曲线,分析系统的稳定性、超调量和调节时间。
3、控制器的设计与仿真设计比例控制器(P 控制器)、比例积分控制器(PI 控制器)和比例积分微分控制器(PID 控制器)。
对给定的控制系统,分别使用不同的控制器进行仿真,比较系统的性能指标,如稳态误差、响应速度等。
4、复杂控制系统的仿真建立包含多个环节的复杂控制系统模型,如串级控制系统、前馈控制系统等。
分析系统在不同输入信号下的响应,评估系统的控制效果。
五、实验步骤1、打开 MATLAB 软件,新建脚本文件。
2、根据实验内容,定义系统的数学模型和参数。
3、使用 MATLAB 中的函数,如 step()函数绘制系统的阶跃响应曲线。
4、对响应曲线进行分析,计算系统的性能指标,如超调量、调节时间、稳态误差等。
5、设计控制器,修改系统模型,重新进行仿真,比较系统性能的改善情况。