霍尔传感器电容传感器4实验数据+图形
- 格式:doc
- 大小:2.94 MB
- 文档页数:12

上海电力学院检测技术实验实验八 压阻式压力传感器的压力测量实验一、实验目的了解扩散硅压阻式压力传感器测量压力的原理与方法。
二、实验仪器压力传感器、气室、气压表、分压器、差动放大器、电压放大器、直流电压表 三、实验原理扩散硅压力传感器的工作原理如图8-1,在X 形硅压力传感器的一个方向上加偏置电压形成电流i ,当敏感芯片没有外加压力作用,内部电桥处于平衡状态,当有剪切力作用时,在垂直于电流方向将会产生电场变化i E ⋅∆=ρ,该电场的变化引起电位变化,则在与电流方向垂直的两侧得到输出电压Uo 。
i d E d U O ⋅∆⋅=⋅=ρ (8-1) 式中d 为元件两端距离。
实验接线图如图8-2所示,MPX10有4个引出脚,1脚接地、2脚为Uo+、3脚接+5V 电源、4脚为Uo-;当P1>P2时,输出为正;P1<P2时,输出为负(P1与P2为传感器的两个气压输入端所产生的压强)。
图8-1 扩散硅压力传感器原理图图8-2 扩散硅压力传感器接线图四、实验内容与步骤1. 按图8-2接好“差动放大器”与“电压放大器”,“电压放大器”输出端接数显直流电压表,选择20V 档,打开直流开关电源。
2. 调节“差动放大器”与“电压放大器”的增益调节电位器到适当位置并保持不动,用导线将“差动放大器”的输入端短接,然后调节调零电位器使直流电压表20V 档显示为零。
3. 取下短路导线,并按图8-2连接“压力传感器”与“分压器”。
4.气室的活塞退回到刻度“17”的小孔后,使气室的压力相对大气压均为0,气压计指在“零”刻度处,将“压力传感器”的输出接到差动放大器的输入端,调节Rw1使直流电压表20V档显示为零。
6.实验结束后,关闭实验台电源,整理好实验设备。
实验九扩散硅压阻式压力传感器差压测量一、实验目的了解利用压阻式压力传感器进行差压测量的方法。
二、基本原理压阻式压力传感器的硅膜片受到两个压力P1和P2作用时,由于它们对膜片产生的应力正好相反,因此作用在膜片上是△P=P1-P2,从而可以进行差压测量。
传感器(检测与转换)实验指导书李欣编著目录实验一电阻式传感器的单臂电桥性能实验 (3)实验二电阻式传感器的半桥性能实验 (6)实验三电阻式传感器的全桥性能实验 (8)实验四变面积式电容传感器特性实验 (10)实验五差动式电容传感器特性实验 (13)实验六差动变压器的特性实验 (14)实验七自感式差动变压器的特性实验 (16)实验八光电式传感器的转速测量实验 (18)实验九接近式霍尔传感器实验 (20)实验十涡流传感器的位移特性实验 (22)实验十一温度传感器及温度控制实验(AD590) (24)实验十二超声波传感器的位移特性实验 (27)附录一计算机数据采集系统的使用说明 (29)附录二检测与转换技术(传感器)实验台使用手册 (31)实验一电阻式传感器的单臂电桥性能实验一、实验目的1、了解电阻应变式传感器的基本结构与使用方法。
2、掌握电阻应变式传感器放大电路的调试方法。
3、掌握单臂电桥电路的工作原理和性能。
二、实验所用单元电阻应变式传感器、调零电桥、差动放大器板、直流稳压电源、数字电压表、位移台架。
三、实验原理及电路1、电阻丝在外力作用下发生机械变形时,其阻值发生变化,这就是电阻应变效应,其关系为:ΔR/ R=Kε,ΔR为电阻丝变化值,K为应变灵敏系数,ε为电阻丝长度的相对变化量ΔL/ L。
通过测量电路将电阻变化转换为电流或电压输出。
2、电阻应变式传感如图1-1所示。
传感器的主要部分是下、下两个悬臂梁,四个电阻应变片贴在梁的根部,可组成单臂、半桥与全桥电路,最大测量范围为±3mm。
11─外壳2─电阻应变片3─测杆4─等截面悬臂梁5─面板接线图图1-1 电阻应变式传感器3、电阻应变式传感的单臂电桥电路如图1-2所示,图中R1、R2、R3为固定,R为电阻应变片,输出电压U O=EKε,E为电桥转换系数。
图1-2 电阻式传感器单臂电桥实验电路图四、实验步骤1、固定好位移台架,将电阻应变式传感器置于位移台架上,调节测微器使其指示15mm 左右。
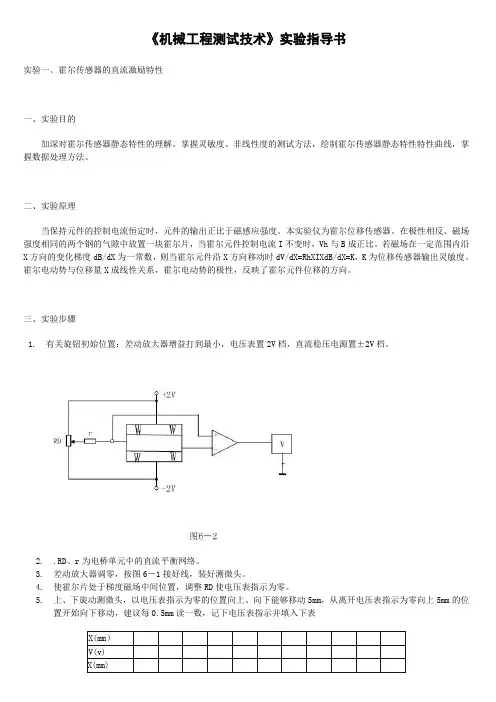
《机械工程测试技术》实验指导书实验一、霍尔传感器的直流激励特性一、实验目的加深对霍尔传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制霍尔传感器静态特性特性曲线,掌握数据处理方法。
二、实验原理当保持元件的控制电流恒定时,元件的输出正比于磁感应强度。
本实验仪为霍尔位移传感器。
在极性相反、磁场强度相同的两个钢的气隙中放置一块霍尔片,当霍尔元件控制电流I不变时,Vh与B成正比。
若磁场在一定范围内沿X方向的变化梯度dB/dX为一常数,则当霍尔元件沿X方向移动时dV/dX=RhXIXdB/dX=K,K为位移传感器输出灵敏度。
霍尔电动势与位移量X成线性关系,霍尔电动势的极性,反映了霍尔元件位移的方向。
三、实验步骤1.有关旋钮初始位置:差动放大器增益打到最小,电压表置2V档,直流稳压电源置±2V档。
2..RD、r为电桥单元中的直流平衡网络。
3.差动放大器调零,按图6-1接好线,装好测微头。
4.使霍尔片处于梯度磁场中间位置,调整RD使电压表指示为零。
5.上、下旋动测微头,以电压表指示为零的位置向上、向下能够移动5mm,从离开电压表指示为零向上5mm的位置开始向下移动,建议每0.5mm读一数,记下电压表指示并填入下表X(mm)V(v)X(mm)V(v)6.用以上的位移和输出电压数据,绘出霍尔传感器静态特性的位移和输出电压特性V-X曲线, 指出线性范围。
7.将位移和输出电压数据分成两组,用“点系中心法”对数据进行处理,并计算两点联线的斜率,即得到灵敏度值。
实验可见:本实验测出的实际是磁场的分布情况,它的线性越好,位移测量的线性度也越好,它们的变化越陡,位移测量的灵敏度也就越大。
四、思考题1.为什么霍尔元件位于磁钢中间位置时,霍尔电动势为0。
2.在直流激励中当位移量较大时,差动放大器的输出波形如何?实验二、电容传感器的直流特性实验内容:加深对电容传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制电容传感器静态特性曲线,掌握数据处理方法。

实验四电涡流传感器位移特性实验一、实验目的:1、了解电涡流传感器测量位移的工作原理和特性。
2、了解不同的被测体材料对电涡流传感器性能的影响。
3、了解电涡流传感器位移特性与被测体的形状和尺寸有关。
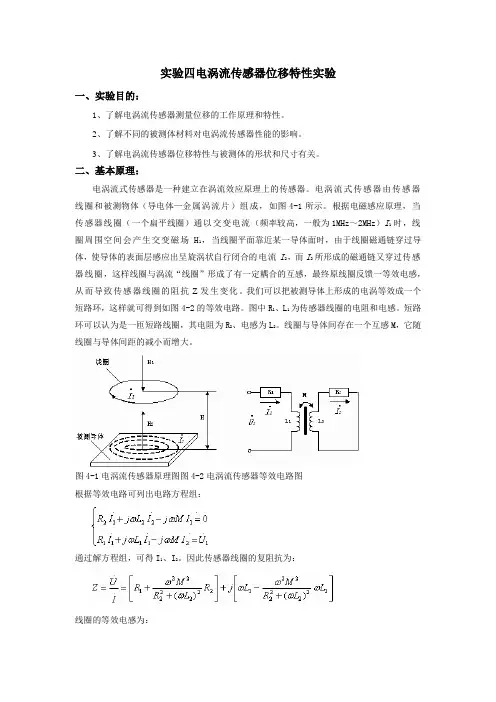
二、基本原理:电涡流式传感器是一种建立在涡流效应原理上的传感器。
电涡流式传感器由传感器线圈和被测物体(导电体—金属涡流片)组成,如图4-1所示。
根据电磁感应原理,当传感器线圈(一个扁平线圈)通以交变电流(频率较高,一般为1MHz~2MHz)I1时,线圈周围空间会产生交变磁场H1,当线圈平面靠近某一导体面时,由于线圈磁通链穿过导体,使导体的表面层感应出呈旋涡状自行闭合的电流I2,而I2所形成的磁通链又穿过传感器线圈,这样线圈与涡流“线圈”形成了有一定耦合的互感,最终原线圈反馈一等效电感,从而导致传感器线圈的阻抗Z发生变化。
我们可以把被测导体上形成的电涡等效成一个短路环,这样就可得到如图4-2的等效电路。
图中R1、L1为传感器线圈的电阻和电感。
短路环可以认为是一匝短路线圈,其电阻为R2、电感为L2。
线圈与导体间存在一个互感M,它随线圈与导体间距的减小而增大。
图4-1电涡流传感器原理图图4-2电涡流传感器等效电路图根据等效电路可列出电路方程组:通过解方程组,可得I1、I2。
因此传感器线圈的复阻抗为:线圈的等效电感为:线圈的等效Q值为:Q=Q0{[1-(L2ω2M2)/(L1Z22)]/[1+(R2ω2M2)/(R1Z22)]}式中:Q0—无涡流影响下线圈的Q值,Q0=ωL1/R1;Z22—金属导体中产生电涡流部分的阻抗,Z22=R22+ω2L22。
由式Z、L和式Q可以看出,线圈与金属导体系统的阻抗Z、电感L和品质因数Q值都是该系统互感系数平方的函数,而从麦克斯韦互感系数的基本公式出发,可得互感系数是线圈与金属导体间距离x(H)的非线性函数。
因此Z、L、Q均是x的非线性函数。
虽然它整个函数是一非线性的,其函数特征为"S"型曲线,但可以选取它近似为线性的一段。


目录实验一金属箔式应变计三种桥路性能比较 (2)实验二电容传感器性能实验 (5)实验三霍尔式传感器—直流激励特性 (7)实验四光电开关传感器转速测量 (9)实验五光纤位移传感器静态实验 (11)实验一 金属箔式应变计三种桥路性能比较一、实验目的1、掌握应变传感器的基本工作原理;2、掌握应变传感器的测量电路(电桥电路);3、学习传感器与计算机进行通信的方法;4、掌握利用虚拟仪器技术进行数据采集;5、掌握对测试数据进行静态特性分析的方法;6、验证单臂、半桥、全桥的性能及相互之间关系。
二、预习要求1、认真阅读实验指导书,明确本次实验的目的,首先从理论上明白三种桥式电路的工作原理以及在本次实验中作用。
2、按照实验指导书的实验内容及步骤写出详细的实验步骤。
3、绘制与之对应的实验线路图,并说明详细的接线方法。
三、实验原理电阻丝在外力作用下发生机械变形时,其电阻值发生变化,这就是电阻应变效应,描述电阻应变效应的关系式为:/R R K ε∆=。
式中/R R ∆为电阻丝电阻的相对变化,K 为应变灵敏系数,/l l ε=∆为电阻丝长度相对变化,金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感元件,通过它转换被测部位的受力状态变化,电桥的作用是完成电阻到电压的比例变化,电桥的输出电压反映了相应的受力状态。
单臂电桥输出电压/4o U EK ε=,只有一个桥臂电阻是应变片,其余为固定电阻。
半桥测量电路中,将受力性质相反的两应变片接入电桥邻边,其余两个临边接固定电阻,输出电压/2o U EK ε=,其输出灵敏度比单臂桥提高了一倍;全桥测量电路中,将受力性质相同的两应变片接入电桥对边,不同的接入邻边,当应变片初始阻值:R1= R2= R3= R4,其变化值ΔR1=ΔR2=ΔR3=ΔR4时,其桥路输出电压o U KE ε=。
其输出灵敏度比半桥提高了一倍,非线性误差和温度误差均得到改善。
四、实验仪器(所需单元及部件)直流稳压电源、差动变换器I 、电桥、电压表、砝码、应变片传感器、电源。
实验三十七 位移传感器实验实验目的1. 了解电容式传感器结构及其特点。
2. 了解霍尔效应及其霍尔位移传感器工作原理。
实验原理关于传感器的初步介绍请参见“应变片传感器”的相关内容。
位移传感器的功能在于把机械位移量转换成电信号。
根据不同的物理现象(或物理过程),可以设计不同类型的位移传感器。
本实验首先研究电容位移传感器,在研究与拓展部分再讨论霍尔位移传感器。
1. 电容式传感器基本原理电容式传感器是指能将被测物理量的变化转换为电容量变化的一种传感器。
它实质上是具有一个可变参数的电容器。
利用平板电容器原理:0r SS C ddεεε==(1)式中,S 为极板面积,d 为极板间距离, 为真空介电常数, 为介质相对介电常数。
可以看出:当被测物理量使S 、d 或 发生变化时,电容量C 随之发生改变。
如果保持其中两个参数不变而仅改变另一参数,就可以将该参数的变化单值地转换为电容量的变化。
所以电容传感器可以分为三种类型:改变极间距离的变间隙式,改变极板面积的变面积式和改变介电常数的变介电常数式。
本实验采用变面积式电容传感器。
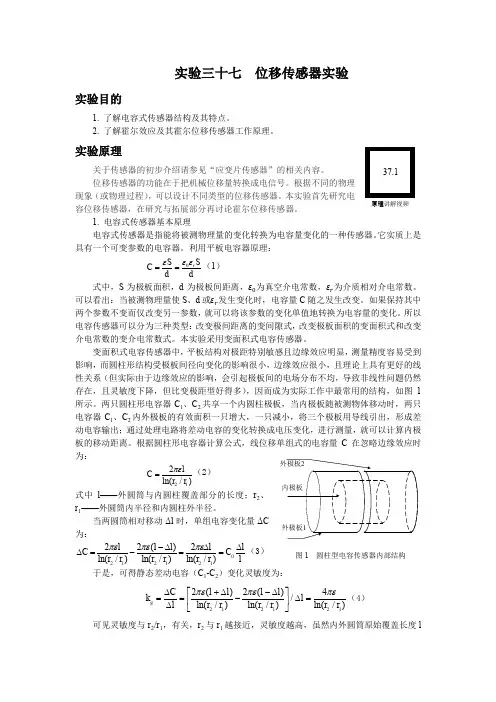
变面积式电容传感器中,平板结构对极距特别敏感且边缘效应明显,测量精度容易受到影响,而圆柱形结构受极板间径向变化的影响很小,边缘效应很小,且理论上具有更好的线性关系(但实际由于边缘效应的影响,会引起极板间的电场分布不均,导致非线性问题仍然存在,且灵敏度下降,但比变极距型好得多),因而成为实际工作中最常用的结构,如图1所示。
两只圆柱形电容器C 1、C 2共享一个内圆柱极板,当内极板随被测物体移动时,两只电容器C 1、C 2内外极板的有效面积一只增大,一只减小,将三个极板用导线引出,形成差动电容输出;通过处理电路将差动电容的变化转换成电压变化,进行测量,就可以计算内极板的移动距离。
根据圆柱形电容器计算公式,线位移单组式的电容量C 在忽略边缘效应时为:212ln(/)l C r r πε=(2) 式中l ——外圆筒与内圆柱覆盖部分的长度;r 2、r 1——外圆筒内半径和内圆柱外半径。
传感器测试实验报告实验一直流激励时霍尔传感器位移特性实验一、实验目的:了解霍尔式传感器原理与应用。
二、基本原理:金属或半导体薄片置于磁场中,当有电流流过时,在垂直于磁场和电流的方向上将产生电动势,这种物理现象称为霍尔效应。
具有这种效应的元件成为霍尔元件,根据霍尔效应,霍尔电势UH=KHIB,当保持霍尔元件的控制电流恒定,而使霍尔元件在一个均匀梯度的磁场中沿水平方向移动,则输出的霍尔电动势为UHk_,式中k—位移传感器的灵敏度。
这样它就可以用来测量位移。
霍尔电动势的极性表示了元件的方向。
磁场梯度越大,灵敏度越高;磁场梯度越均匀,输出线性度就越好。
三、需用器件与单元:霍尔传感器实验模板、霍尔传感器、15V直流电源、测微头、数显单元。
四、实验步骤:1、将霍尔传感器安装在霍尔传感器实验模块上,将传感器引线插头插入实验模板的插座中,实验板的连接线按图9-1进行。
1、3为电源5V,2、4为输出。
2、开启电源,调节测微头使霍XX大致在磁铁中间位置,再调节Rw1使数显表指示为零。
图9-1直流激励时霍尔传感器位移实验接线图3、测微头往轴向方向推进,每转动0.2mm记下一个读数,直到读数近似不变,将读数填入表9-1。
表9-1作出V-_曲线,计算不同线性范围时的灵敏度和非线性误差。
五、实验注意事项:1、对传感器要轻拿轻放,绝不可掉到地上。
2、不要将霍尔传感器的激励电压错接成15V,否则将可能烧毁霍尔元件。
六、思考题:本实验中霍尔元件位移的线性度实际上反映的时什么量的变化七、实验报告要求:1、整理实验数据,根据所得得实验数据做出传感器的特性曲线。
2、归纳总结霍尔元件的误差主要有哪几种,各自的产生原因是什么,应怎样进行补偿。
实验二集成温度传感器的特性一、实验目的:了解常用的集成温度传感器基本原理、性能与应用。
二、基本原理:集成温度传器将温敏晶体管与相应的辅助电路集成在同一芯片上,它能直接给出正比于绝对温度的理想线性输出,一般用于-50℃-+150℃之间测量,温敏晶体管是利用管子的集电极电流恒定时,晶体管的基极—发射极电压与温度成线性关系。
第1篇一、实验目的1. 理解传感器的基本原理和分类。
2. 掌握常见传感器的工作原理和特性。
3. 学会传感器信号的采集和处理方法。
4. 提高实验操作能力和数据分析能力。
二、实验设备与器材1. 传感器实验平台2. 数据采集卡3. 信号发生器4. 示波器5. 计算机及相应软件6. 传感器:热敏电阻、霍尔传感器、光电传感器、电容式传感器、差动变压器等三、实验内容及步骤1. 热敏电阻实验(1)目的:了解热敏电阻的工作原理和特性。
(2)步骤:1. 将热敏电阻连接到实验平台上,并设置信号发生器输出一定频率的正弦波信号。
2. 通过数据采集卡采集热敏电阻的输出信号。
3. 使用示波器观察热敏电阻输出信号的波形和幅度。
4. 分析热敏电阻输出信号与温度的关系。
2. 霍尔传感器实验(1)目的:了解霍尔传感器的工作原理和特性。
1. 将霍尔传感器连接到实验平台上,并设置信号发生器输出一定频率的正弦波信号。
2. 通过数据采集卡采集霍尔传感器的输出信号。
3. 使用示波器观察霍尔传感器输出信号的波形和幅度。
4. 分析霍尔传感器输出信号与磁场强度的关系。
3. 光电传感器实验(1)目的:了解光电传感器的工作原理和特性。
(2)步骤:1. 将光电传感器连接到实验平台上,并设置信号发生器输出一定频率的正弦波信号。
2. 通过数据采集卡采集光电传感器的输出信号。
3. 使用示波器观察光电传感器输出信号的波形和幅度。
4. 分析光电传感器输出信号与光照强度的关系。
4. 电容式传感器实验(1)目的:了解电容式传感器的工作原理和特性。
(2)步骤:1. 将电容式传感器连接到实验平台上,并设置信号发生器输出一定频率的正弦波信号。
2. 通过数据采集卡采集电容式传感器的输出信号。
3. 使用示波器观察电容式传感器输出信号的波形和幅度。
4. 分析电容式传感器输出信号与电容变化的关系。
5. 差动变压器实验(1)目的:了解差动变压器的工作原理和特性。
1. 将差动变压器连接到实验平台上,并设置信号发生器输出一定频率的正弦波信号。
实验一 金属箔式应变片——单臂电桥性能实验一、实验目的了解金属箔式应变片的应变效应,单臂电桥工作原理和性能。
二、实验仪器应变传感器实验模块、托盘、砝码、数显电压表、±15V 、±5V 电源、万用表(自备)。
三、实验原理电阻丝在外力作用下发生机械变形时,其电阻值发生变化,这就是电阻应变效应,描述电阻应变效应的关系式为ε⋅=∆k RR(1-1)式中RR∆为电阻丝电阻相对变化; k 为应变灵敏系数; ll∆=ε为电阻丝长度相对变化。
金属箔式应变片就是通过光刻、腐蚀等工艺制成的应变敏感组件。
如图1-1所示,将四个金属箔应变片分别贴在双孔悬臂梁式弹性体的上下两侧,弹性体受到压力发生形变,应变片随弹性体形变被拉伸,或被压缩。
图1-1 双孔悬臂梁式称重传感器结构图通过这些应变片转换弹性体被测部位受力状态变化,电桥的作用完成电阻到电压的比例变化,如图1-2所示R5=R6=R7=R 为固定电阻,与应变片一起构成一个单臂电桥,其输出电压RRR E U ⋅+∆⋅=21/40 (1-2)E 为电桥电源电压;式1-2表明单臂电桥输出为非线性,非线性误差为L=%10021⋅∆⋅-RR 。
图1-2 单臂电桥面板接线图四、实验内容与步骤1.应变传感器上的各应变片已分别接到应变传感器模块左上方的R1、R2、R3、R4上,可用万用表测量判别,R1=R2=R3=R4=350Ω。
2.差动放大器调零。
从主控台接入±15V、±5V电源,检查无误后,合上主控台电源开关,将差动放大器的输入端Ui短接,输出端Uo2接数显电压表(选择2V档)。
调节电位器Rw3使电压表显示为0V。
关闭主控台电源。
3.按图1-2连线,将应变式传感器的其中一个应变电阻(如R1)接入电桥与R5、R6、R7构成一个单臂直流电桥。
4.加托盘后电桥调零。
电桥输出接到差动放大器的输入端Ui,检查接线无误后,合上主控台电源开关,预热五分钟,先调节Rw1使电压表显示近似为零,再调节Rw4约中间位置。
《机械工程测试技术》实验指导书
实验一、霍尔传感器的直流激励特性
一、实验目的
加深对霍尔传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制霍尔传感器静态特性特性曲线,掌握数据处理方法。
二、实验原理
当保持元件的控制电流恒定时,元件的输出正比于磁感应强度。
本实验仪为霍尔位移传感器。
在极性相反、磁场强度相同的两个钢的气隙中放置一块霍尔片,当霍尔元件控制电流I不变时,Vh与B成正比。
若磁场在一定范围内沿X方向的变化梯度dB/dX为一常数,则当霍尔元件沿X方向移动时dV/dX=RhXIXdB/dX=K,K为位移传感器输出灵敏度。
霍尔电动势与位移量X成线性关系,霍尔电动势的极性,反映了霍尔元件位移的方向。
三、实验步骤
1.有关旋钮初始位置:差动放大器增益打到最小,电压表置2V档,直流稳压电源置±2V档。
2..RD、r为电桥单元中的直流平衡网络。
3.差动放大器调零,按图6-1接好线,装好测微头。
4.使霍尔片处于梯度磁场中间位置,调整RD使电压表指示为零。
5.上、下旋动测微头,以电压表指示为零的位置向上、向下能够移动5mm,从离开电压表指示为零向上5mm的位
置开始向下移动,建议每0.5mm读一数,记下电压表指示并填入下表
X(mm)
V(v)
X(mm)
6.用以上的位移和输出电压数据,绘出霍尔传感器静态特性的位移和输出电压特性V-X曲线, 指出线性范围。
7.将位移和输出电压数据分成两组,用“点系中心法”对数据进行处理,并计算两点联线的斜率,即得到灵敏度
值。
实验可见:本实验测出的实际是磁场的分布情况,它的线性越好,位移测量的线性度也越好,它们的变化越陡,位移测量的灵敏度也就越大。
四、思考题
1.为什么霍尔元件位于磁钢中间位置时,霍尔电动势为0。
2.在直流激励中当位移量较大时,差动放大器的输出波形如何?
实验二、电容传感器的直流特性
实验内容:加深对电容传感器静态特性的理解。
掌握灵敏度、非线性度的测试方法,绘制电容传感器静态特性曲线,掌握数据处理方法。
实验步骤
1.按图7-1差动放大器“+”、“-”输入端对地短接,旋动放大器调零电位器,使低通滤波器输出为零。
电
容变换器增益,处于最大位置(顺时针到头)。
2.差动放大器增益旋钮开到中间,V/F表打到2V档,调节测微头,使输出为零。
3.旋动测微头,改变振动台位置,每次0.5mm,记下此时测微器的读数及电压表的读数,直至电容动片与上(或
下)静片复盖面积最大为止。
X(mm)
V(v)
4.退回测微器至初始位置。
并开始以相反方向旋动。
同上法记下X(mm)及V(v)值:
X(mm)
V(v)
5.用以上的位移和输出电压数据,绘出电容传感器静态特性的位移和输出电压V-X特性曲线。
6.将位移和输出电压数据分成两组,用“点系中心法”对数据进行处理,并计算两点联线的斜率,即得到灵敏
度值。
思考题
1. 为什么要采用差动电容结构?
2. 观察差动电容传感器,试推导覆盖面积而变化的表达式。
(设差动电容分别为C1、C2)
实验三、金属箔式应变片--单臂单桥的特性
一. 实验原理
金属箔式应变片是利用栅状金属片代替栅状金属丝。
金属箔栅上丝系用光刻技术制造,线条均匀,尺寸准确,限值一致性好。
箔片厚约1~10µm,散热性好。
把应变片用特制胶水粘固再弹性元件或需要测量变形的物体表面上。
在外力的作用下,电阻丝随该物体一起变形,其电阻值发生相应变化。
由此被测量转换为电阻变。
.单臂单桥这里是直流电桥,四个桥臂电阻分别为R1、R2、R3、R4,其中R4为电阻应变片。
电桥调对称平衡后R1=R2,R3=R4。
这是通常所说的第一种对称电桥,电桥工作在第一种对称形式下可获得最大的灵敏度。
二. 实验步骤
1.将差动放大其调零(方法见前面介绍差动放大器).调好后调零电位器不动,差动放大器增益电位器适当减少。
2.观察梁上的应变片。
3.根据图3-1的电路结构,利用电桥单元的接线柱和调零网络,用导线连接好测量线路(差动放大器接成同相反
均可)
4.上测微投,旋紧固定螺钉,转动测微头使双平行梁处于水平位置(目测)。
5.将直流稳压电源开关打开±4V档,预热数分钟,调整直流电桥平衡电位器RD,使电压表指示为零。
6.旋动测微头,记下梁端位移与表头显示电压的数值,每1mm记下位移指示值和电压表显示数值.填入下表: 位移mm
电压V
7.根据所得结果计算系统的灵敏S,并作出V-X关系曲线。
S=△V/△X
8.若紧接着做下一个实验则不用拆接线.
实验四、金属箔式应变片三种桥路性能比较
一、实验原理:
说明实际使用的应变电桥的性能和原理。
已知单臂、半桥和全桥电路的∑R分别为△R/R、2△R/R、4△R/R。
根据戴维南定理可以得出测试电桥的输出电压近似等于1/4·E·∑R,电桥灵敏度Ku=V/△R/R,于是对应于单臂、半桥和全桥的电压灵敏度度分别为1/4E、1/2E和E.。
由此可知,当E和电阻相对变化一定时,电桥及电压灵敏度与各桥臂阻值的大小无关。
三、实验步骤:
1.在完成实验一的基础上,不变动差动放大器增益和调零电位器,依次将图(1)中电桥固定电阻R1、R2、R3换成箔式应变片,分别接成半桥和全桥测试系统。
2.重复上实验的步骤,测出半桥和全桥输出电压并列表,计算灵敏度。
3.在同一坐标上描出V-X曲线,比较三种桥路的灵敏度,并做出定性的结论。
单臂桥数据
位移mm
电压V
位移mm
电压V
位移mm
电压V
位移mm
电压V
半桥数据
全桥数据
位移mm
电压V
位移mm
电压V
位移mm
电压V
四、注意事项:
1.应变片接入电桥时注意其受力方向,一定要接成差动形式。
2.直流激励电压不能过大,以免造成应变片自热损坏。
3.由于进行位移测量时测微头要从零-→正的最大值,又回复到零,再-→负的最大值,因此容易造成零点偏移,因此计算灵敏度时可将正△X的灵敏度与负的△X的灵敏度分开计算。
再求平均值,以后实验中凡需过零的实验均可采用此种方法。
1.
2.
3。