Recurdyn安装说明
- 格式:pdf
- 大小:938.85 KB
- 文档页数:15
RecurDyn常见问题及解答目录安装和帮助 (2)概念理解 (3)Recurdyn导入和导出 (4)基本操作 (6)技术问题 (8)约束和接触 (8)柔性体 (8)履带 (9)链 (9)带 (10)分析计算 (10)其他 (11)安装和帮助:Q:RecurdynV7R2正式版和试用版的安装讲解?A:参考我们的安装文件。
Q:我可以获得哪方面的技术支持?A:使用版和正式版得到的技术支持不同。
根据购买技术服务与否,分别可以获得简单问题咨询、复杂问题咨询、模型调试、客户化定制等不同等级的技术支持。
Q:帮助文档有中文版的吗?A:目前只有英文的帮助文档,中文帮助文档正在进行中,将来会有。
Q:练习模型在哪个文件夹?A:C:\Program Files\FunctionBay, Inc\RecurDyn V7R2\Help\Manual\Tutorials\Basic TutorialQ:Tut1_Crank Slider 3D文件夹怎么没有任何模型?A:模型都是自己按照Tut1_Crank Slider建立的,文件夹里没有CAD模型。
概念理解:Q:SYSFNC的第2,3个参数是什么意思?A:第2个参数指坐标信息,第3个参数指坐标数量。
比如DX,DX有I,J坐标系也可以是I,J,K坐标系。
Q:rotational spring force中spring coefficient 和damping coefficient两个参数各自对扭矩的影响是什么?A:前者是弹簧刚度,乘上变形角度得到扭矩;后者是阻尼,乘上旋转速度得到扭矩。
Q:ExtendedSurfaceToSurface参数在实际运用中的对分析结果的影响A:法向力可表示为-k*(abs(delt))^m1-c*((abs(delt))^m3)*(dot(delt))^m2其中m1对应刚度指数;m2对应阻尼指数;m3对应渗透指数。
各量取值的多少,要看你定义的是线性或非线性。

1.创建轮胎力注意点:(1)生成轮胎力时,重力方向必须要在Z轴方向(2)必须在XZ平面建立轮胎模型(3)轮胎力的Z轴是轮胎的旋转轴(4)轮胎模型和轮胎力的方向必须一致(5)轮胎中心点方向必须与轮胎力的运动marker点方向一致步骤:(1)将重力方向设为Z轴,将工作平面改为XZ平面(2)创建轮胎几何模型(3)将工作平面改为XY平面(为了创建轮胎力)(4)单击FORCE下的轮胎力图标(5)单击2点,轮胎力Z轴方向由这2点决定(6)打开轮胎力属性对话框,将connector选项卡中的欧拉角复制到剪贴板(7)打开轮胎几何模型属性对话框(8)将材料输入方式由library改为user input(9)单击CM,在弹出的对话框中选择origin&orientation选项卡,在欧拉角一栏中粘贴,将轮胎几何模型的质心marker点方向修改为轮胎力的action marker 的欧拉角方向一致。
可以通过设置轮胎属性参数来建立不同轮胎模型。
2.路面轮胎需要和路面接合起来进行仿真,提供了4中创建路面的方式:Outline road :轮廓线路面Spline road :样条曲线路面Face road :面路面Import road :导入路面文件步骤:(1)单击body下的ground按钮,进入ground编辑界面(2)通过curve and surface 创建2条样条曲线或2条轮廓线(3)单击spline road 或是outline road(4)选择样条曲线,右击在快捷菜单中选择fininsh operation 确认生成路面。
面路面,事先创建一个面,其他步骤和线路线相同。
recurdyn常用函数
recurdyn是一个用于模拟和分析递归动态系统的MATLAB 工具箱。
它提供了一组函数来帮助用户创建、分析和可视化递归动态系统的行为。
以下是一些常用的recurdyn函数:
1.rdyn: 这是创建递归动态系统的基本函数。
它允许用户定义系统的状态方程、初
始条件和参数。
2.step: 该函数用于模拟递归动态系统的瞬态响应。
它会在每个时间步长上更新系
统的状态,并返回模拟结果。
3.bode: 该函数用于计算并绘制递归动态系统的频率响应。
它返回系统的频率响应
数据,并生成相应的频谱图。
4.nyquist: 该函数用于计算并绘制递归动态系统的Nyquist图。
它基于系统的传
递函数或状态方程来计算系统的Nyquist曲线,并生成相应的图像。
5.margin: 该函数用于计算并绘制递归动态系统的稳定性边界。
它返回系统的稳定
性和鲁棒性边界,并生成相应的图像。
6.simulink: 该函数允许用户将recurdyn系统嵌入到MATLAB Simulink 模型
中,以便进行仿真和分析。
这些函数只是recurdyn工具箱中的一部分,还有许多其他功能和函数可用于模拟和分析不同类型的递归动态系统。
建议查阅MATLAB 的官方文档以获取更详细的信息和示例代码。
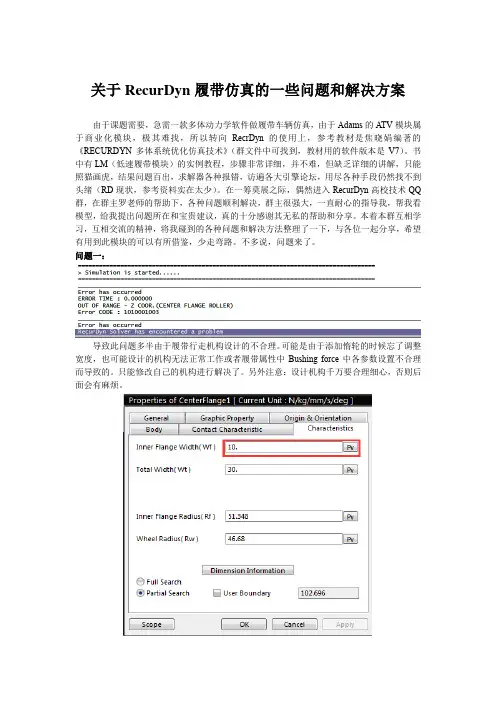
关于RecurDyn履带仿真的一些问题和解决方案由于课题需要,急需一款多体动力学软件做履带车辆仿真,由于Adams的A TV模块属于商业化模块,极其难找,所以转向RecrDyn的使用上,参考教材是焦晓娟编著的《RECURDYN多体系统优化仿真技术》(群文件中可找到,教材用的软件版本是V7)。
书中有LM(低速履带模块)的实例教程,步骤非常详细,并不难,但缺乏详细的讲解,只能照猫画虎,结果问题百出,求解器各种报错,访遍各大引擎论坛,用尽各种手段仍然找不到头绪(RD现状,参考资料实在太少)。
在一筹莫展之际,偶然进入RecurDyn高校技术QQ 群,在群主罗老师的帮助下,各种问题顺利解决,群主很强大,一直耐心的指导我,帮我看模型,给我提出问题所在和宝贵建议,真的十分感谢其无私的帮助和分享。
本着本群互相学习,互相交流的精神,将我碰到的各种问题和解决方法整理了一下,与各位一起分享,希望有用到此模块的可以有所借鉴,少走弯路。
不多说,问题来了。
问题一:导致此问题多半由于履带行走机构设计的不合理。
可能是由于添加惰轮的时候忘了调整宽度,也可能设计的机构无法正常工作或者履带属性中Bushing force中各参数设置不合理而导致的。
只能修改自己的机构进行解决了。
另外注意:设计机构千万要合理细心,否则后面会有麻烦。
问题二:如果要将链轮和履带板等部件改成自己的参数,十有八九都会碰到这个问题,无法有效啮合。
经过反复尝试,给出我的解决方案:如果在最简单的(只有链轮和带轮的结构下)出现报错,试着加个托带轮,并认真调整它的高度。
我建的几个模型都是通过这种办法解决的,如有更好的建议欢迎补充。
另外注意:有可能支重轮和托带轮的纵向位置稍微改变就会导致仿真失败,建议建模时一步一步增加部件,随时仿真验证。
问题三:可以仿真,但是履带穿透链轮或者惰轮。
这个可以通过调整履带属性中Bushing force中各参数试试,实在不行,可以改变机构。
我是通过,增加了链轮齿数,并且将与履带板啮合的齿数调整为2个解决的。

FFlex实例教程作者:叶献孟课程属性:高级教程学习目的:FFlex仿真模型目的:显示柔性体接触运动时的受力分布情况,本模型可以应用于汽车刹车盘的仿真。
操作:步骤一设定工作环境和导入模型1,设定工作环境在桌面上,双击RecurDyn,出现New Model工作窗口,在Name中输入FFlexClutch,点击Ok完成2,导入柔性体模型(1)在工具栏中,FFlex->Import,在Modeling Input toolbar 中输入0,0,0;选择clutchPlate.dat,点击Open,将Body Name改为FFlexClutchPlate,点击OK完成,按一下键盘上F键,并将icon 和marker点的尺寸变为10;(2)File->Import,将File of type设置为ParaSolidFile(*.x_t,*x_b…),在FFlex文件目录下,选择clutchDriver.x_t,点击Open,并将其名字改为clutchDriver;(3)和步骤(2)一样,导入clutchLoad.x_t文件,并将名字改为clutchLoad,在其Property选项中的Body标签栏中,选择Material Input Type为Density,并在Density中输入8.34e-5.;(4)Menu-Tools->Settings->Model Settings,在Options1的标签中,点击Graphical Quality,将Wire Frame Detail Level和Shading Detail Level的滑动条移到最右面,即High到位置。
点击OK,并保存模型。
步骤二添加约束1,设定工作平面点击Working Plane工具,选择XY Plane作为工作平面2,添加转动副(1)创建驱动转动副Joint->Revolute,选择Body,Body,Point,先选择Ground,在点击clutchDriver,在Modeling Input window中,输入0,0,0;并将RevJoint1的名字改为driverRevJoint,(2)创建负载转动副Joint->Revolute,选择Body,Body,Point。


新一代的系统级多体动力学分析软件—虚拟产品设计开发工具RecurDyn (Recursive Dynamic)是由韩国FunctionBay公司基于其划时代算法——递归算法开发出的新一代多体系统动力学仿真软件。
它采用相对坐标系运动方程理论和完全递归算法,非常适合于求解大规模及复杂接触的多体系统动力学问题。
传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决得远远不够完善,这其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。
基于此,韩国FunctionBay 公司充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn软件。
该软件具有令人震撼的求解速度与稳定性,成功地解决了机构接触碰撞中上述问题,极大地拓展了多体动力学软件的应用范围。
RecurDyn不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。
RecurDyn 借助于其特有的MFBD(Multi Flexible Body Dynamics)多柔体动力学分析技术,可以更加真实地分析出机构运动中的部件的变形,应力,应变。
RecurDyn 中的MFBD技术用于分析柔性体的大变形非线性问题,以及柔性体之间的接触,柔性体和刚性体相互之间的接触问题。
传统的多体动力学分析软件只可以考虑柔性体的线型变形,对于大变形,非线性,以及柔性体之间的相互接触就无能为力了。
RecurDyn 中为用户提供了完整的解决方案,包含控制,电子,液压以及CFD,为用户的产品开发提供了完整的产品虚拟仿真、开发平台。
RecurDyn 的专业模块还包括,送纸机构模块,齿轮元件模块,链条分析模块,皮带分析模块,高速运动履带分析模块,低速运动履带分析模块,轮胎模块,发动机开发设计模块。
鉴于RecurDyn的强大功能,软件广泛应用航空、航天、军事车辆、军事装备、工程机械、电器设备、娱乐设备、汽车卡车、铁道、船舶机械及其它通用机械等行业。


RecurDyn概述RecurDyn (Recursive Dynamic)是由韩国FunctionBay公司基于其划时代算法——递归算法开发出的新一代多体系统动力学仿真软件。
它采用相对坐标系运动方程理论和完全递归算法,非常适合于求解大规模及复杂接触的多体系统动力学问题。
传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决得远远不够完善,这其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。
基于此,韩国FunctionBay 公司充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn软件。
该软件具有令人震撼的求解速度与稳定性,成功地解决了机构接触碰撞中上述问题,极大地拓展了多体动力学软件的应用范围。
RecurDyn不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。
RecurDyn 借助于其特有的MFBD(Multi Flexible Body Dynamics)多柔体动力学分析技术,可以更加真实地分析出机构运动中的部件的变形,应力,应变。
RecurDyn 中的MFBD 技术用于分析柔性体的大变形非线性问题,以及柔性体之间的接触,柔性体和刚性体相互之间的接触问题。
传统的多体动力学分析软件只可以考虑柔性体的线型变形,对于大变形,非线性,以及柔性体之间的相互接触就无能为力了。
RecurDyn 给用户提供了一套完整的虚拟产品解决方案,可以和控制,流体,液压等集合在一起进行分析。
形成机、电、液一体化分析,为用户的产品开发提供了完整的产品虚拟仿真、开发平台。
RecurDyn 的专业模块还包括,送纸机构模块,齿轮元件模块,链条分析模块,皮带分析模块,高速运动履带分析模块,低速运动履带分析模块,轮胎模块,发动机开发设计模块。
鉴于RecurDyn的强大功能,软件广泛应用航空、航天、军事车辆、军事装备、工程机械、电器设备、娱乐设备、汽车卡车、铁道、船舶机械及其它通用机械等行业。
Ansys多体动力学仿真软件:RecurDYN介绍Ansys 多体动力学仿真软件:RecurDYN 介绍传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决的远远不够完善,其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。
基于此,FunctionBay Inc.充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn 软件,具有令人震撼的求解速度与稳定性,成功地解决机构接触碰撞中的上述问题,极大地拓展了多体动力学软件的应用范围。
RecurDyn 不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。
特色功能强健的隐式积分器和混合积分器 ?相对坐标和递归算法,求解快速稳定 ?多种接触方式,柔性体的接触碰撞 ?柔性体分析,包括大变形、非线性 ?多级子系统 ?图层管理 ? 完全windows 风格客户价值相对坐标系的运动方程,完全递归算法及强健的求解器,使RecurDYN 具有飞驰般的求解速度 ?完全的基于WINDOWS 开发的软件,操作界面友好,易学易用 ?装配自动化,大大减少人工工作量,提高了效率 ?求解稳定可靠,结果令人信服 ?可在最短的时间内修正设计方案,极大的缩短产品的设计周期 ?专用工具包,针对特定应用,为用户量身定制? Solid,前后处理模块广州有道科技培训中心 h t t p ://w w w .020f e a .c o m2D、3D 模型建立;可读取各种CAD 格式的模型文件;可调式的彩色显示功能显示系统/子系统结构,具有子系统模块化功能;提供图层结构管理;模型参数化;灵敏度分析,实验设计分析(DOE);客户化界面;图表;动画;曲线编辑器;数据过滤器;傅立叶变换,多视窗分割显示;可输入外部数据文件。
Solver,求解器完全递归式方程结构;数值运算器DDASSL/IMGALPHA;数值阻尼可适应性自动化,去除数值上的杂讯;可进行批处理运算;可调整CPU 的优先使用权,加速分析执行;内建轮胎/路面力(TIRE)模块;非线性梁、板单元;提供完整的2D/3D(曲面与曲面)接触分析。
【转】RecurDyn经验帮助RecurDyn, 经验1.force 就是力,也就是 F. 在RecurDyn 中力可以用公式或者方程来表示。
force 中有各种各样的力,例如spring ,bushing等Joint 就是约束,限制物体的自由度。
contact 是力的一种。
物体接触时候产生的力。
例如小球掉到地面上。
force 和 Joint 在一些极端的条件下可以等价的。
例如,绞结,你就可以用bushing 来代替,把绞结相应的钢都定义的非常大就可以了。
例如球绞结,他限制了物体连接处的x,y,z 三个方向不能运动。
如果用bushing 来代替,你可以把bushing 的X,Y,Z 的刚度都定义到很大(10E9),这样,物体在x,y,z 方向的位移非常小了-〉0 。
相当于把x,y,z都给限制住了。
这些方法可以解决一些过约束问题。
详细的你可以看一看各种力的刚度矩阵。
以及contact的力的方程。
2.怎么为FFLEX添加转动副?答:可以的,在柔性体上施加一个mpc or fdr, mpc 的master node 上施加铰接就可以了。
施加铰接的时候,选择点的时候就选择这个节点就可以。
不对NODE自由度进行拘束时,也可以用一般拘束方式(JOINTS/ Bushing)#但是要注意一点,记得把FFLEX BODY的connecting parameters内的user force connectore关闭,否则会有求解问题。
原文说明如下:Use Force Connector : It determines the connector type. If you check option, it means that you want to use a force connector. On the other hand, un-checking means that you want to use a fixed joint as a connector.3.关于柔性体,建议用R-Flex. 采用模态综合法建立柔性体。