16
3.1.2 车身高度的控制
当乘员人数和载重量发生变化时,车身的离地 高度可保持在一个选定高度上,保证车轮全行程跳 动,消除在非设计行驶高度下引起的操控性变化现 象,同时解决了被动悬架针对载荷变化通常将刚度 设计偏高而造成舒适性损失的问题。在粗糙路面上 可增加离地间隙提高通过性,高速行驶时可适当减 少离地间隙以减少阻力,同时降低重心利于提高操 控性和舒适性。在上下乘客、装卸货物等不同情况 下,可实现车身高度的自由调节。
3.1.4 车轮接地性
通过调节悬架参数可降低车轮载荷波动,提
高附着效果,有利于操控性,同时也减轻了轮
胎磨损。延长轮胎和制动系统的使用寿命。
3.1.5能有效克服多轴车的轴荷转移问题
19
Байду номын сангаас
3.2 主要缺点
全主动悬架结构及控制策略复杂,
其硬件要求高、耗能大、成本高,并
且会增加整车重量,也给整车空间布
置带来了一定的困难。
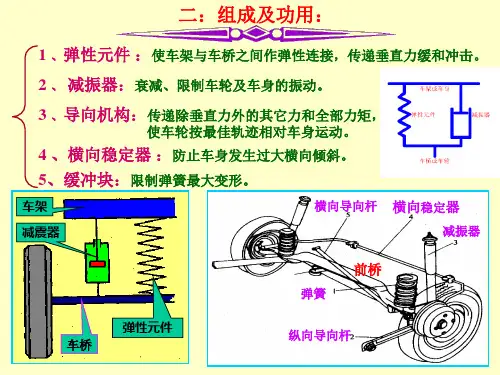
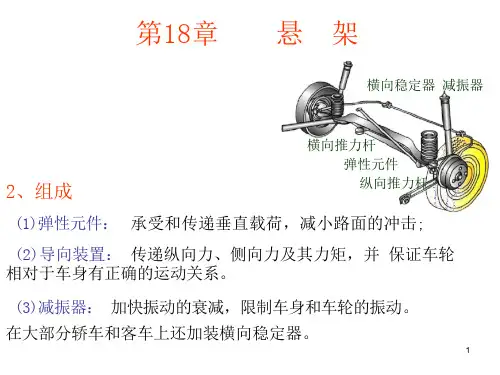
起导向作用。在汽车的行驶过程当中,能够控
制车轮的运动轨迹。
9
2 主动悬架分类
2..1 分类
汽车悬架可分为被动悬架和主动悬架。 主动悬架根据控制方式,可分为半主动悬架、慢主动
悬架、全主动悬架和馈能型主动悬架。
主动悬架系统按照受控介质分为空气主动悬架、油气
主动悬架、液力主动悬架和电磁主动悬架等
10
脉冲信号。根据此信号可判断转向盘的转角与
转速;通过两组信号的相位来判断转向的方向。
29
图 5.1 转向盘转角传感器结构示意图
30
5.2.2 加速度传感器 【作用】检测车身横向加速度和纵向加速度。横 向加速度传感器主要用于检测汽车转向时,汽车 因离心力的作用而产生的横向加速度,以判断悬