【CN109814581A】ROV水下机器人自动定深运动控制方法【专利】
- 格式:pdf
- 大小:1.17 MB
- 文档页数:19
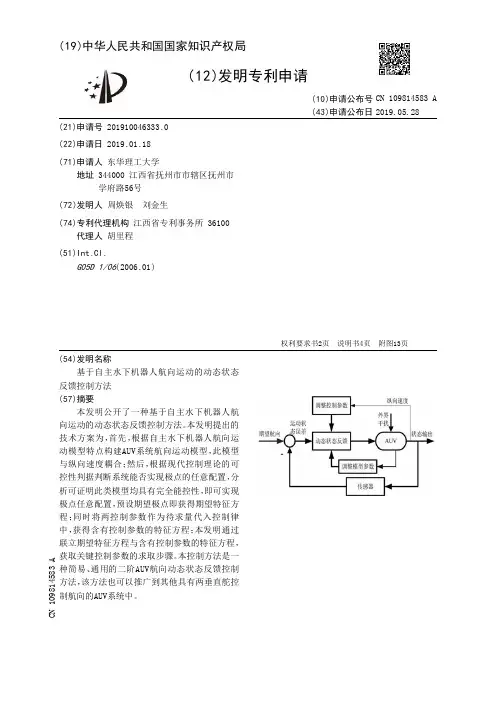
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910300120.6(22)申请日 2019.04.15(71)申请人 深圳鳍源科技有限公司地址 518000 广东省深圳市龙岗区坂田街道雅南路1号星河领创天下二期一楼(72)发明人 张翀 张美昭 (74)专利代理机构 北京品源专利代理有限公司11332代理人 孟金喆(51)Int.Cl.B63C 11/52(2006.01)B63H 5/08(2006.01)(54)发明名称一种水下机器人、水下机器人的控制方法及装置(57)摘要本发明实施例公开了一种水下机器人、水下机器人的控制方法以及水下机器人的控制装置,该水下机器人包括:机器人本体以及设置在所述机器人本体侧面的至少三组推进器阵列,每组推进器阵列包括:每组推进器阵列中的两个推进器组件沿所述机器人本体的中轴线对称设置于所述机器人本体的两侧;位于所述中轴线同侧的至少三个推进器组件与所述中轴线呈至少三个夹角值,以使推进机构在至少三个推进方向上,向所述水下机器人提供推动力。
本发明实施例的技术方案,通过设置在机器人本体侧面的至少六个推进器组件实现了对水下机器人位置和姿态的控制,尤其实现了全角度的悬停控制和移动控制,极大地提高了水下机器人的运动灵活性,提高了控制精度。
权利要求书2页 说明书5页 附图2页CN 109911157 A 2019.06.21C N 109911157A权 利 要 求 书1/2页CN 109911157 A1.一种水下机器人,其特征在于,包括:机器人本体以及设置在所述机器人本体侧面的至少三组推进器阵列,每组推进器阵列包括:两个推进器组件;所述推进器组件包括:壳体以及推进机构,所述壳体用于承载所述推进机构;每组推进器阵列中的两个推进器组件沿所述机器人本体的中轴线对称设置于所述机器人本体的两侧;位于所述中轴线同侧的至少三个推进器组件与所述中轴线呈至少三个夹角值,以使推进机构在至少三个推进方向上,向所述水下机器人提供推动力。
![一种机器人水下定位方法及机器人水下定位系统[发明专利]](https://uimg.taocdn.com/2e6a36e077eeaeaad1f34693daef5ef7ba0d129a.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201911327782.9(22)申请日 2019.12.20(71)申请人 清华四川能源互联网研究院地址 610000 四川省成都市天府大道南段2039号天府创客街区(72)发明人 王皓冉 李永龙 陈永灿 张华 (74)专利代理机构 北京超凡宏宇专利代理事务所(特殊普通合伙) 11463代理人 周永强(51)Int.Cl.G01C 21/16(2006.01)G01S 17/02(2020.01)G01S 17/06(2006.01)(54)发明名称一种机器人水下定位方法及机器人水下定位系统(57)摘要本发明涉及水下定位技术领域,具体而言,涉及一种机器人水下定位方法及机器人水下定位系统。
一种机器人水下定位方法,其包括以下步骤:接收安装在水面平台上的短基线基阵输出的表征机器人相对于所述水面平台位置的信号,并输出表征机器人相对于所述水面平台位置的第一位置信息;判断所述水面平台是否位于第一区域或第二区域;若所述水面平台位于第一区域,根据所述第一位置信息及所述第二位置信息,确定所述机器人的位置;若所述水面平台位于第二区域,根据所述第一位置信息、所述第三位置信息及第四位置信息,确定所述机器人的位置。
该机器人水下定位方法能够提高机器人在水下的定位精度。
权利要求书2页 说明书5页 附图1页CN 111024069 A 2020.04.17C N 111024069A1.一种机器人水下定位方法,其特征在于,所述机器人水下定位方法包括以下步骤:接收安装在水面平台上的短基线基阵输出的表征机器人相对于所述水面平台位置的信号,并输出表征机器人相对于所述水面平台位置的第一位置信息;判断所述水面平台是否位于第一区域或第二区域;若所述水面平台位于第一区域,接收安装在岸上的RTK基站输出的表征所述水面平台位置的信号,并输出表征所述水面平台位置的第二位置信息;根据所述第一位置信息及所述第二位置信息,确定所述机器人的位置;若所述水面平台位于第二区域,接收安装在所述水面平台上的惯性测量单位IMU输出的表征所述水面平台位置的信号,并输出表征所述水面平台位置的第三位置信息;接收安装在所述水面平台上的激光雷达输出的表征所述水面平台位置的信号,并输出表征所述水面平台位置的第四位置信息;根据所述第一位置信息、所述第三位置信息及所述第四位置信息,确定所述机器人的位置。
![遥控水下机器人ROV的供电系统及其控制方法[发明专利]](https://uimg.taocdn.com/ddb50c36cd1755270722192e453610661ed95a2f.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011197551.3(22)申请日 2020.10.30(71)申请人 株洲中车时代电气股份有限公司地址 412001 湖南省株洲市石峰区时代路169号(72)发明人 张定华 彭勃 刘可安 尚敬 刘浩平 张向阳 杨鸣远 徐绍龙 陈智豪 肖伟 刘畅 吴旋 廖津余 周要 汤树芳 李仁雄 (74)专利代理机构 上海专利商标事务所有限公司 31100代理人 徐伟(51)Int.Cl.H02M 7/12(2006.01)H02M 5/12(2006.01)H02M 1/14(2006.01)(54)发明名称遥控水下机器人ROV的供电系统及其控制方法(57)摘要本发明提供了一种用于遥控水下机器人ROV的供电系统,包括:升压变压器,用于对船舶电压执行升压变换操作;整流器,用于对该升压变压器的输出进行整流操作;直流滤波器,用于对该整流器的整流输出执行直流滤波操作以输出高压直流电压,该直流滤波器通过电缆为水下的ROV供电;以及电压补偿模块,用于基于该直流滤波器的输出电流确定该电缆上的压降,并基于该压降和ROV端的目标设定值对该整流器执行压降补偿控制以输出稳定的该高压直流电压。
权利要求书2页 说明书12页 附图6页CN 112366961 A 2021.02.12C N 112366961A1.一种遥控水下机器人ROV的供电系统,包括:升压变压器,用于对船舶电压执行升压变换操作;整流器,用于对所述升压变压器的输出进行整流操作;直流滤波器,用于对所述整流器的整流输出执行直流滤波操作以输出高压直流电压,所述直流滤波器通过电缆为水下的ROV供电;以及电压补偿模块,用于基于所述直流滤波器的输出电流确定所述电缆上的压降,并基于所述压降和ROV端的目标设定值对所述整流器执行压降补偿控制以输出稳定的所述高压直流电压。