人工智能:图形识别之猜拳机器人
- 格式:doc
- 大小:1.32 MB
- 文档页数:8
史陶比尔机器人资料简介史陶比尔机器人(Stauber Robot)是一种先进的人工智能机器人,以其卓越的智能能力和多功能性而在全球范围内受到广泛关注。
史陶比尔机器人由一家名为史陶比尔科技有限公司(Stauber Technologies Ltd.)的公司开发和制造。
这些机器人设计用于解决各种日常任务,旨在提高人们的生活质量。
功能史陶比尔机器人具有多种功能,可应对各种日常任务和需求。
以下是史陶比尔机器人的主要功能:1.人脸识别技术:史陶比尔机器人搭载了先进的人脸识别技术,能够准确识别和辨认人类面孔。
这项功能可以应用于家庭安防系统和身份验证等领域。
2.智能语音控制:史陶比尔机器人可以通过语音识别和自然语言处理技术与用户进行交互。
用户可以用语音指令控制机器人完成各种任务,如播放音乐、查询信息、控制家电等。
3.家庭助理功能:史陶比尔机器人可以成为您的家庭助理,帮助管理家庭日常事务。
它可以设置提醒事项、记录购物清单、管理日程安排,并提供有用的家庭生活建议。
4.娱乐和休闲功能:史陶比尔机器人内置了丰富的娱乐和休闲功能,如音乐播放器、电影推荐、游戏和智力问答等。
机器人还可以与多个用户进行互动,并提供个性化的娱乐建议。
5.智能家居控制:史陶比尔机器人可以与智能家居设备进行无缝集成,实现家庭自动化。
用户可以通过机器人控制家庭照明、温度、安全系统等,提供更便捷、智能的家居体验。
6.教育和学习功能:史陶比尔机器人拥有丰富的教育和学习资源,可以与用户一起学习和辅助教育。
它可以提供知识问答、在线课程、语言学习和科学实验等功能,为用户提供个性化的学习体验。
技术特点史陶比尔机器人采用了一些先进的技术,使其能够达到卓越的表现。
以下是史陶比尔机器人的主要技术特点:1.人工智能技术:史陶比尔机器人搭载了先进的人工智能算法和深度学习模型,能够自主学习和提升智能水平。
它可以根据用户的喜好和习惯,提供个性化的服务和建议。
2.计算机视觉技术:史陶比尔机器人具备出色的计算机视觉能力,能够实时分析环境并作出相应反应。
2024 超人机器视觉与鸟叔机器视觉
2024年,超人机器视觉和鸟叔机器视觉在技术领域迅速崭露
头角。
随着人工智能的不断发展,机器视觉成为了一个备受关注的领域。
超人机器视觉和鸟叔机器视觉作为两家领先的公司,都在开展关于机器视觉的研究工作。
超人机器视觉专注于开发能够感知和理解图像的技术。
他们致力于研究如何让机器能够像人类一样识别、分析和解释图片中的内容。
通过深度学习和神经网络等技术手段,超人机器视觉的产品在图像识别、图像处理和图像生成等方面取得了重大突破。
他们的技术已经被广泛应用于人脸识别、自动驾驶、智能摄像头等领域。
鸟叔机器视觉则专注于机器视觉在无人机和航空领域的应用。
他们开发了一系列视觉系统,用于无人机的导航、避障和目标检测等任务。
这些系统通过搭载高分辨率摄像头和实时图像处理算法,可以让无人机能够准确地感知周围环境,并根据目标进行精确操作。
鸟叔机器视觉的技术被广泛应用于航拍、农业、物流等领域,极大地提升了工作效率和精度。
除了各自领域的应用外,超人机器视觉和鸟叔机器视觉也在合作研究中取得了一些突破。
他们共同研发了一款智能巡检机器人,该机器人能够在工厂、仓库等场所进行巡检和监控工作,实现了自主导航、物体识别和异常检测等功能。
综上所述,2024年的超人机器视觉和鸟叔机器视觉都展现出
了令人瞩目的技术实力。
无论是超人机器视觉通过图像识别改
善人们的生活质量,还是鸟叔机器视觉在无人机领域的创新应用,这些技术都为我们带来了更加便捷和高效的体验。
随着技术的不断进步,相信机器视觉将在未来继续发挥重要作用,为人类创造更美好的未来。

目录一、摘要 (3)二、作品介绍 (3)三、工作原理 (4)四、作品功能、特色 (5)五、作品结构 (5)(一)硬件部分………………………………………(二)软件部分.............................................六、参考资料 (6)一﹑作品摘要:本设计以HT32系列的微控制器为控制核心,以并联机械臂为基础的下棋机器人。
该机器人,利用视觉识别及人工智能技术实现下棋。
在下棋过程利用视觉采集信息,运用四步最优算法,对控制电机实现位置闭环控制,提高下棋精度。
并联机械臂的快捷性保证了下棋过程的感官享受,该作品致力于将五子棋机器人小型化\智能化,以嵌入式HT平台为支撑,灵活控制机械手臂,实现真正意义上的人机对弈,综合成本较低将使其适用于大众消费。
关键词:并联机器人HT单片机人工智能视觉识别小型化二、作品介绍:智能下棋机器人以HT32系列的微控制器为控制核心,由棋盘及棋子、机械手臂(硬件)、机械臂控制系统(HT单片机控制系统)等部分组成。
机器人通过摄像头实时捕捉棋子的位置变动,得到对手的出招,然后输入到五子棋算法中得到应招,之后HT单片机通过控制Delta并联机械臂来完成棋子的定位和控制气缸完成吸放动作,从而实现了真正意义上的人机对弈。
三、工作原理:3.1控制系统机械臂控制系统由一片HT32系列的微控制器作为主控,其中定时器用于读取电机编码器,并用于生成电机控制信号、控制步进电机、控制舵机,另有若干IO用于读取开关量、控制气泵通断。
控制程序分为8个模块,均采用状态机形式,分别为systick任务分配模块、系统作业模块,USART串口中断服务模块,串口命令解析模块,机械臂坐标解算与插补模块,电机驱动模块,步进电机驱动模块,,舵机驱动模块。
各个模块之间互相独立,数据通过各模块的状态结构体进行数据交换。
3.2并联机械臂结构本设计采用三臂构成的Delta并联机械臂,每条臂中两条短杆分别与两条长杆采用球铰连接,材料为斜纹碳纤杆,驱动电机平台和动平台均采用亚克力板材料,在满足强度要求的情况下,减轻机构重量。
先建立个Game包然后我做的是分了5个类来做的TestStartGuess 类package class TestStartGuess {/*** 人机互动版猜拳游戏* 程序入口*/public static void main(String[] args) {Game game=new Game();();();}}类package * 用户类*阶段1完成* @param <Scanner>*/public class Person {String name ="匿名";刀 2.石头 3.布*/public int showFist(){刀 2.石头 3.布 (输入相应数字):");int show=();刀 2.石头 3.布*/public int showFist(){刀,2.石头,3.布");Scanner input=new Scanner;String exit="n"; //退出系统do{initial();//初始化/*选择对方角色*/"请选择对方角色:(1:刘备,2:孙权,3:曹操):"); int role=();if(role==1){="刘备";}else if(role==2){="孙权";}else if(role==3){="曹操";//扩展功能1:输入用户姓名/*输入用户姓名*/"请输入你的姓名:");=();"VS"++"对战\n");//扩展功能1结束"要开始吗(y/n)");String start=();//开始每一局游戏int perFist; //用户出的拳int compFist; //计算机出的拳while("y")){/*出拳*/perFist=();compFist=();/*裁决*/if((perFist==1&&compFist==1)||(perFist==2&&compFist==2)||(perFist==3&&compFist= =3)){"结果:和局,真衰!嘿嘿,等着瞧吧!\n"); //平局}elseif((perFist==1&&compFist==3)||(perFist==2&&compFist==1)||(perFist==3&&compFist= =2)){"结果:恭喜,你赢了!"); //用户赢++;}else{"结果说:^_^,你输了,真笨!\n"); //计算机赢++;}count++;"\n是否开始下一轮(y/n):");start=();}/*显示结果*/showResult();//扩展功能3:循环游戏,知道退出系统"\n要开始下一局吗(y/n):");exit=();//扩展功能3结束}while(!("n"));"系统退出!");}/*** 显示比赛结果public void showResult(){/*显示对战次数*/"-------------------------------");"VS"+;"对战次数:"+count);//扩展功能2:显示最终的得分"\n姓名\t得分");"\t"+;"\t"++"\n");//扩展功能2结束/*显示对战结果*/int result=calcResult();if(result==1){"结果:打成平手,下次再和你一分高下!");}else if(result==2){"结果:恭喜恭喜!"); //用户获胜}else{"结果:呵呵,笨笨,下次加油啊!"); //计算机获胜 }"--------------------------------");}/*** 计算比赛结果* @return1:战平; 2:用户赢; 3:电脑赢*/public int calcResult(){if=={return 1;//战平}else if>{return 2;//用户赢}else{return 3;//电脑赢}}}类package class StartGuess {public static void main (String[] args){Game c = new Game();();}}然后编译执行就OK了希望能帮到你。
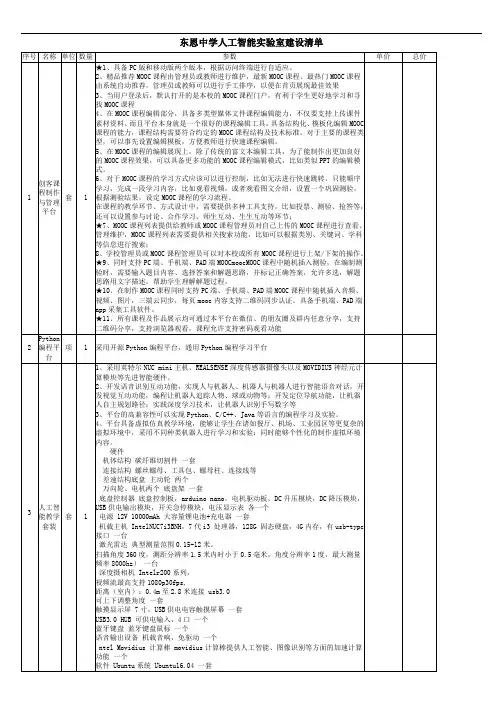
东恩中学人工智能实验室建设清单
注:以下为必需满足项
1、打★为必须满足项,不满足视为无效报价。
2、为考虑售后服务问题,报价人注册地址必须为宁波市海曙区、鄞州区、高新区、江北区企业,并提供营业执照复印件。
3、供应商须提供创客课程制作与管理平台软件著作权证书与原厂质保函,并出具平台终身免费升级服务承诺函
4、11月14日早上9点到学校二楼会议室,各投标单位要求对创客课程制作与管理平台进行现场演示(演示要求见附件1)
5、竣工验收后,按照区财政有关支付规定,先付中标金额的95%,一年后无息返还剩余的5%。
部编初中七年级语文课外阅读理解练习含答案一、部编语文七年级上册课外阅读理解练习1.阅读《邓稼先》选段,完成后面题目。
(A)“两弹”元勋邓稼先于1924年出生在安徽省怀宁县。
在北平上完小学和中学以后,于1945年自昆明西南联大毕业。
1948年到1950年赴美国普渡大学读理论物理,获得博土学位后立即乘船回国,1950年10到中国科学院工作。
1958年8月奉命带领几十个大学毕业生开始研究原子弹制造的理论。
这以后的28年间,邓稼先始终站在中国原子武器设计制造和研究的第一线,领导许多学者和技术人员,成功地设计了中国的原子弹和氢弹,把中华民族国防自卫武器引导到了世界先进水平。
1964年10月16日中国爆炸了第一颗原子弹。
1967年6月17日中国爆炸了第一顆氢弹。
这些日子是中华民族五千年历史上的重要日子,是中华民族完全摆脱任人宰割危机的新生日子!1967年以后邓稼先继续他的工作,至死不懈,对国防武器作出了许多新的巨大贡献。
1985年8月邓稼先做了切除直肠癌的手术。
次年3月又做了第二次手术。
在这期间他和于敏联合署名写了一份关于中华人民共和国核武器发展的建议书。
1986年5月邓稼先做了第三次手术,7月29日因全身大出血而逝世。
“鞠躬尽瘁,死而后已”正好准确地描述了他的一生。
邓稼先是中华民族核武器事业的奠基人和开拓者。
张爱萍将军称他为“两弹”元勋,他是当之无愧的。
(B)永恒的骄傲邓稼先逝世以后,在我写给他夫人许鹿希的电报与书信中有下面几段话——邓稼先为人忠诚纯正,是我最敬爱的挚友。
他的无私的精神与巨大的贡献是你的也是我的永恒的骄傲。
——邓稼先去世的消息使我想起了他和我半个世纪的友情,我知道我将永远珍惜这些记忆。
希望你在此沉痛的日子里多从长远的历史角度去看稼先和你的一生,只有真正永恒的才是有价值的。
——邓稼先的一生是有方向、有意识地前进的。
没有彷徨,没有矛盾。
——是的,如果稼先再次选择他的人生的话,他仍会走他已走过的道路。
玩个游戏:猜猜你内心?师:现在我们一起进入20Q网,这个网站可以通过20个是或否的问题,猜出你心中所想的答案。
比如我们以老虎为例,看看AI是否能猜到我们内心所想呢?2. 体验图像识别建筑、植物和动物思考2:如何更全面地了解旅游景点?师:我们利用社会实践课的机会,来到了位于承德的“青少年生态环境教育基地”——塞罕坝。
在极端困难的条件下,通过塞罕坝两代人近50年的艰苦奋斗,使荒原变为林海,沙漠成绿洲,我们一起走进塞罕坝,感受绿色奇迹。
Q1:这个建筑是什么?利用百度识图,了解建筑信息。
Q2: 塞罕坝常见的两种松树分别是什么品种?利用华为智能识物,识别出松树品种为樟子松、落叶松。
Q3:护林员的狗是什么品种?利用IOS识之软件,识别出分别是阿拉斯加和哈士奇。
为什么软件拍照能分辨出建筑、植物和动物的品种呢?是因为运用了人工智能的图像识别。
什么是图像识别?图像识别是利用计算机对图像进行处理、分析和了解,以识别各种不同模式的目标和对象的技术。
图像识别技术是以图像的主要特征为基础的。
每个图像都有其特征,集中在图像轮廓曲度最大或轮廓方向突然改变的地方的信息量最大。
图像识别出狗品种的原理:通过狗的图像特征信息,如阿拉斯加的耳朵比较圆润,尾巴上翘,毛较硬等与数据库中的所有狗特征做比对,即可识别出狗的品种。
什么是自然语言处理?它主要研究实现人与计算机之间用自然语言进行有效通信、交流的各种理论和方法。
自然语言处理涉及语义理解、机器翻译和问答系统等领域。
自然语言处理的翻译过程及原理:“讯飞听见”先通过语义理解,将人口述的中文信息转化为中文文字,注重对信息的理解和精准程度的把控;其次通过机器翻译,将中文信息进行输入、识别与分析,翻译成英文进行输出。
小学信息技术《AI猜拳游戏》教学设计一、教学目标通过本教学设计,学生能够了解到:1.人工智能的基本概念和应用场景;2.简单的编程思想和流程控制;3.利用 Scratch 编写简单的小游戏。
二、教学内容和方法1. 人工智能的基本概念和应用场景(1)人工智能的定义人工智能(Artificial Intelligence,简称AI)是一种仿生技术,是指让计算机程序具有某些形式的智能能力,能够像人一样具有感知、判断、理解和思考等智能活动。
(2)人工智能的应用场景人工智能已经被应用于各个领域,例如语音识别、图像识别、自然语言处理、机器翻译、智能推荐、智能医疗、智能家居等等。
2. 简单的编程思想和流程控制(1)编程思想编程是计算机科学的核心内容之一,是指通过一定的语言,将人类思想和计算机指令进行对接,使计算机按照人类的需求进行工作。
编程思想是指在编程过程中需要运用的一些方法、技巧和逻辑思维。
(2)流程控制流程控制是编程思想中的一部分,是指控制程序运行的顺序和方式。
通常使用的流程控制语句包括条件语句和循环语句。
3. 利用 Scratch 编写简单的小游戏Scratch 是一种视觉化编程语言,适合初学者学习编程和开发小游戏。
本教学设计将以 Scratch 为工具,让学生学习如何编写简单的小游戏,并深入了解代码背后的逻辑和流程控制。
三、教学步骤和时间分配1. 人工智能的基本概念和应用场景(15分钟)在此环节,教师将通过图文并茂的教学材料将人工智能的基本概念和应用场景进行简单的介绍。
2. 简单的编程思想和流程控制(30分钟)在此环节,教师将通过案例进行讲解,向学生介绍编程思想和流程控制的概念、定义和使用方法。
3. 利用 Scratch 编写简单的小游戏(75分钟)在此环节,学生将动手操作 Scratch,编写一个简单的 AI 猜拳小游戏。
(1)设置场景首先,学生需要设置一个游戏场景,并添加一些角色。
在角色中,需要设置 AI 和用户两个角色。
小学信息技术《AI猜拳游戏》教学设计一、教学目标通过本节课的学习,学生应该可以掌握以下几点:1.了解人工智能的基本概念;2.掌握Python基础知识;3.可以编写简单的Python程序实现猜拳游戏;4.初步认识人工智能在猜拳游戏中的应用。
二、教学内容2.1 人工智能的基本概念首先,教师可以通过讲解人工智能(AI)的基本概念,让学生了解到AI在日常生活中的应用以及其重要性。
AI是一种利用计算机模拟人类智能的技术,它可以从大量的数据中学习、识别图像、文字、声音等信息,进行推理和决策,让计算机做出“智能”的行为。
教师可以通过举一些具体的例子,如:•人脸识别技术;•语音识别技术;•自动驾驶技术等。
让学生初步认识到AI的应用场景和优势。
2.2 Python基础知识接下来,教师可以通过讲解Python语言的基本语法和语句结构,让学生初步认识到Python的使用。
教师可以从以下几方面对Python进行介绍:•Python的数据类型和变量;•Python的条件语句和循环语句;•Python的函数和模块。
通过这些基础知识的讲解,让学生可以起步编写简单的Python程序。
2.3 编写猜拳游戏程序在学生掌握了Python的基础知识后,教师可以引入游戏的题材,教学编写猜拳游戏程序。
程序的要求如下:•玩家和电脑进行猜拳,能实现出石头、剪刀、布三种手势的随机出拳;•程序根据玩家和电脑的出拳,判断胜负,并输出胜负结果;•程序完成后,可以进行多次游戏,并退出游戏。
编写程序的思路:1.引入random模块,使用randint函数生成电脑的出拳;2.让用户输入石头、剪刀或布,保存为变量player_fist;3.根据player_fist的值和电脑的出拳,判断胜负并输出;4.循环多次进行游戏,直到用户选择退出。
2.4 人工智能在猜拳游戏中的应用最后,教师可以通过讲解人工智能在猜拳游戏中的应用,让学生更深入地认识到AI的实际应用价值。
学校人工智能课程三年教学规划一、指导思想根据2017年国务院发布的《新一代人工智能发展规划》,学校以智慧教育思想和理论为指导,切实推动人工智能教育课程建设,提高师生信息素养。
密切结合我校教育教学实际,提高人工智能教学活动过程中的应用水平,促进我校人工智能教育教学发展。
二、教学目标传播科技理念,普及科技知识;培养创新精神,发展创新能力;提升操作技能,锻炼团队协作;实施素质教育,培养未来人才。
使学生初步树立正确的科学价值观,建立科学必胜的信念,培养创新意识,大胆设想,大胆动手动脑的习惯。
培养学生探究性学习和不断钻研的学习习惯,培养学生克服困难的意志和毅力,具有顽强拼搏精神。
三、教学实施根据学校学情,人工智能课程分为三个学习阶段,以学校课程安排情况,分学校常规周末培训课程和寒暑假7天训练课程。
具体课程安排如下:周末常规培训课每学期每周日下午3:00-5:00,开展人工智能常规培训课,学习课时2课时,根据学生自愿申报,学校挑选一批兴趣浓、基础好、动手能力强的学生开展针对性的钻研、训练,发展一只人工智能精英团队。
开设开源硬件编程课,主要mic:bit主板、arduino主板、开源人工智能主板为梯度学习为主,人工智能图形化编程为辅,进一步培养学生的编程思维,帮助学生将虚拟世界迁移到现实世界,理解人工智能基础逻辑。
学习Scratch有助于孩子们发挥自己的想象力, 培养孩子的逻辑思维能力、激发孩子的创造力,让孩子越来越聪明。
在动手创作过程中,学习积极性、想象力和创造力会得到极大的锻炼。
每学期结课依托期末测试操作题目开展学业质量测评。
寒暑假集训课寒暑假期间7天集训课,每天上午8:30-11:30,开展人工智能集训课,学习课时2课时,根据学生自愿申报,有意向的挑选一批兴趣浓、基础好、动手能力强的学生开展针对性的比赛训练或者编程等级技能考级训练。
主要针对性全国教育部白名单赛事进行赛事培训,或者针对人工智能技能考级和人工智能编程等级考级做培训,让孩子在人工智能的课程中找到竞赛出口和特长生发展方向,通过积极的集训,参与考级和比赛得到很好的锻炼。
人工智能 palm 详解
人工智能(AI)是一种模拟人类智能的技术,它使计算机系统
能够执行需要人类智力的任务。
Palm是一种基于人工智能的手掌识
别技术,它通过对手掌形状、纹理和其他特征的识别和分析,实现
了对手掌的识别和辨识。
下面我将从多个角度来详细解释人工智能Palm技术。
首先,从技术角度来看,Palm技术利用计算机视觉和模式识别
等人工智能技术,通过对手掌的图像进行分析和处理,识别手掌的
形状、纹理、皮肤特征等信息,从而实现对手掌的识别和辨识。
这
种技术可以应用于身份识别、生物特征识别等领域,具有较高的准
确性和安全性。
其次,从应用角度来看,Palm技术可以广泛应用于各种场景。
比如在安防领域,可以用于门禁系统、考勤系统等;在金融领域,
可以用于支付认证、身份验证等;在智能手机领域,可以用于解锁
手机、支付等功能。
此外,Palm技术还可以应用于医疗、交通、教
育等领域,为人们的生活和工作带来便利。
再者,从发展趋势来看,随着人工智能技术的不断进步和普及,
Palm技术也将得到更广泛的应用和发展。
未来,随着硬件设备的改进和成本的降低,Palm技术将更加普及,成为人们生活中不可或缺的一部分。
总的来说,人工智能Palm技术是一种基于人工智能的手掌识别技术,它利用计算机视觉和模式识别等技术,实现对手掌的识别和辨识,具有广泛的应用前景和发展空间。
希望以上解释能够全面地回答你的问题。
“剪刀石头布”手势识别——基于卷积神经网络一、实验目的与要求1.上网查询人工智能卷积神经网络相关知识,掌握卷积神经网路CNN的基本原理2.利用CNN实现“剪刀石头布”的手势识别二、实验环境本次实验用的是python+TensorFlow的方式实现的CNN识别器。
实验环境包括:TensorFlow1.5.0、CUDAv11.3、Cudnn-11.2,python3.6版本三、实验代码源程序:CallFrame.py# 单独给CloseButton添加标签self.CloseButton.setProperty('color', 'gray') # 自定义标签self.GetGestureButton.setProperty('color', 'same')self.JudgeButton.setProperty('color', 'same')self.HelpButton.setProperty('color', 'same')# 定义槽函数def GetGesture(self):self.LitResultlabel.setText("")self.ImaResultlabel.setPixmap(QPixmap('./ges_ico/white.ico'))self.LitResultlabel.setAutoFillBackground(False)saveGesture()self.LitResultlabel.setText("已经将该图像保存在电脑本地")self.LitResultlabel.setAlignment(Qt.AlignCenter)def JudgeGesture(self):global gesture_action # 要修改全局变量需要先在函数里面声明一下self.LitResultlabel.setText("正在调用卷积神经网络识别图像")self.LitResultlabel.setAlignment(Qt.AlignCenter)QApplication.processEvents() # 这里需要刷新一下,否则上面的文字不显示gesture_num = evaluate_one_image()if gesture_num == 1:gesture_action = "1"self.result_show_1()elif gesture_num == 2:gesture_action = "2"self.result_show_2()elif gesture_num == 3:gesture_action = "3"self.result_show_3()elif gesture_num == 4:gesture_action = "4"self.result_show_4()elif gesture_num == 5:gesture_action = "5"self.result_show_5()def ExcuteGesture(self):self.serial_communicate()def Help(self):rmation(self, "操作提示框", "获取手势:通过OpenCV和摄像头获取一张即时照片。
《人工智能初体验》教学设计作者:许佳洁来源:《中国信息技术教育》2020年第16期● 教材分析本课借助生活中的应用引导学生了解人工智能,通过完善“猜拳游戏”和编写脚本识别口罩佩戴情况,让学生体验人工智能模块,感知机器学习的完整过程。
● 學情分析本节课的教学对象是四年级学生,刚开始学习慧编程软件,学生编程能力有差距,所以在编写“识别口罩佩戴”的脚本时,放宽要求,使用基本积木块即可。
● 教学目标知识与技能目标:①初步了解人工智能的概念,知道人工智能在生活中的常见应用;②初步了解机器学习的特点,能完善“机器学习”的“训练模型”;③初步体验慧编程软件中的人工智能模块,能实现基本的人机交互。
过程与方法目标:①通过观看视频、操作实践,了解人工智能的概念;②通过完善“猜拳游戏”人机对战,体会机器学习的检验;③通过编写程序实现“识别口罩佩戴”,感知机器学习的应用;④通过自主探究与团队合作,提升发现问题、分析问题和解决问题的能力。
情感态度与价值观目标:①培养信息意识,提升计算思维能力;②感受科技对生活带来的改变,激发爱科学、学科学、用科学的热情。
行为与创新目标:鼓励学生多思考多表达,激发其学习和探究的兴趣,引导其创想未来世界,尝试用智慧改变生活。
● 教学重难点重点:了解人工智能的概念,感受生活中的人工智能,体验机器学习的过程。
难点:在慧编程中创建较准确的机器学习训练模型,实现人机交互的应用。
● 教学过程1.了解人工智能(1)智能语音助手“小爱同学”师:同学们,你们了解人工智能吗?看看这个词——人工智能,是不是很容易联想到科幻电影里的机器人?它有人的外表,能交流思考,而且很强大,能做很多人类无法轻松实现的事。
这节课我们就要来体验人工智能。
大家看这些是什么?(出示课件)生:闹钟、计算器、开关、导航、音箱。
师:你们看到的这些生活物品,都可以进化成人工智能产品,甚至把这些功能都集合到一个产品上(播放《小爱同学宣传片》),看完这个视频,你的感受是什么?生:“小爱同学”很能干……师:这么厉害的“小爱同学”就是一款人工智能软件。
猜拳器课程设计一、教学目标本课程旨在让学生了解和掌握猜拳器的基本原理和制作方法,培养学生的动手能力和创新能力。
具体目标如下:知识目标:使学生了解猜拳器的工作原理,掌握基本的电子元件知识和电路图阅读能力。
技能目标:培养学生使用电子工具和仪器的能力,学会简单的焊接技术,并能独立完成猜拳器的制作。
情感态度价值观目标:培养学生对科学的热爱和探究精神,增强团队合作意识,提高解决实际问题的能力。
二、教学内容本课程的教学内容主要包括以下几个部分:1.猜拳器的工作原理:介绍猜拳器的工作原理,让学生了解其内部电路和功能。
2.电子元件知识:讲解电子元件的基本知识,包括电阻、电容、二极管等。
3.电路图阅读与分析:教授如何阅读和分析电路图,使学生能够独立理解猜拳器的电路结构。
4.猜拳器的制作:指导学生动手制作猜拳器,培养学生的实际操作能力。
5.猜拳器的调试与优化:教授如何对猜拳器进行调试和优化,提高其性能。
三、教学方法本课程采用讲授法、实践操作法和小组讨论法相结合的教学方法。
1.讲授法:用于讲解猜拳器的工作原理、电子元件知识和电路图阅读方法。
2.实践操作法:让学生亲自动手制作猜拳器,增强实践能力。
3.小组讨论法:在制作和调试过程中,鼓励学生相互交流、讨论,培养团队合作精神。
四、教学资源1.教材:选用与猜拳器制作相关的教材,为学生提供理论知识的学习。
2.参考书:提供电子元件、电路图等相关参考书籍,丰富学生的知识储备。
3.多媒体资料:制作课件和视频,生动形象地展示猜拳器的工作原理和制作过程。
4.实验设备:提供必要的实验设备和工具,如焊接台、电子元件等,确保学生能够顺利进行实践操作。
五、教学评估为了全面、客观地评估学生在课程中的学习成果,本课程采用多种评估方式:1.平时表现:评估学生在课堂上的参与度、提问和回答问题的积极性等。
2.作业:布置与课程内容相关的作业,评估学生的理解和应用能力。
3.考试成绩:设置期中、期末考试,评估学生对课程知识的掌握程度。