管道修复机器人可控点修复系统
- 格式:docx
- 大小:653.78 KB
- 文档页数:2
浅谈地下管道非开挖修复技术发布时间:2023-02-17T02:30:57.362Z 来源:《中国建设信息化》2022年10月19期作者:王永杰[导读] 旧城区市政排水管道随着时间的推移而不断老化,大部分地下排水管道采用深埋,采用传统的开挖修复工艺修复病害管道,势必造成其他地下管线、路面及其他市政道路相关配套设施的破坏,因此管道非开挖修复技术在排水管道修复领域的运用势在必行。
王永杰内江市市政设施建设管护中心四川省内江市东兴区 641000摘要:旧城区市政排水管道随着时间的推移而不断老化,大部分地下排水管道采用深埋,采用传统的开挖修复工艺修复病害管道,势必造成其他地下管线、路面及其他市政道路相关配套设施的破坏,因此管道非开挖修复技术在排水管道修复领域的运用势在必行。
关键词:管道病害,管道检测,非开挖修复技术;一、市政排水管道常见病害类型管道修复前需明确管道的病害类型,需由建设单位或管护单位委托管道检测单位对病害管道进行检测,检测单位针对管道不同的病害类型以及病害程度进行分级,方便后期管理养护单位或项目建设单位针对不同病害类型进行修复。
管道病害一般分为结构性缺陷和功能性缺陷。
(一)功能性缺陷沉积:杂质在管道底部沉淀淤积。
结垢:管道内壁上的附着物,常见于污水管道。
障碍物:管道内影响过流的阻挡物。
残墙、坝根:管道闭水试验时砌筑的临时砖墙封堵,试验后未拆除或拆除不彻底的遗留物。
树根:单根树根或是树根群自然生长进管道。
浮渣:管道内水面上的漂浮物。
(二)结构性缺陷破裂:管道的外部压力超过自身的承受力致使管道发生破裂。
其形式有纵向、环向和复合3种。
变形:管道受外力挤压造成形状变异。
腐蚀:管道内壁受侵蚀而流失或剥落,出现蜂窝麻面或露出钢筋,常见于污水管道或雨污合流管道。
错口:同一接口的两个管口产生横向偏差,未处于管道的正确位置。
起伏:管道未形成定向的排水方向,起伏不定,在低洼处形成洼水。
脱节:两根管道的端部未充分接合或接口脱离。
管道机器人控制及通讯系统和管道检测共3篇管道机器人控制及通讯系统和管道检测1管道机器人控制及通讯系统和管道检测管道机器人控制是指使用控制系统控制管道机器人的运动、操作等行为,使其能够在管道内完成各种任务。
管道机器人通讯系统则是指管道机器人与外部设备或中央控制系统之间的通讯方式,以便实现远程监控和数据传输等功能。
管道检测是指使用各种工具和设备,对管道进行检测、评估和监测,以找出管道内的问题和隐患,以及及时进行维修和保养。
管道机器人控制系统主要分为硬件和软件两部分。
硬件主要包括电机、传感器、阀门、液压系统、机器人外壳、控制面板等。
软件主要是控制系统的软件程序,它可以控制机器人的运动、操作、状态等。
电机是管道机器人完成各种动作的驱动力,传感器可以实现对环境的感知与控制,阀门用于控制管道内的流量和压力,液压系统可以驱动机器人的动作和操作,机器人外壳可以保护机器人的安全和稳定性,控制面板是人机交互的中心,可以实现对机器人的远程控制。
管道机器人的通讯系统主要包括,数据采集、数据存储、数据传输以及远程监控等方面。
数据采集可以通过传感器和控制系统来实现。
数据存储可以在机器人内部的存储设备中实现,也可以通过无线云端的方式进行存储。
数据传输可以通过有线或者无线等通讯方式实现,远程监控可以通过网络或者云端进行实现。
管道检测是指利用工具或设备,对管道进行检测和监测,以找出管道内的问题和隐患,及时进行维修和保养。
管道检测的主要方法包括:摄像头检测、超声波检测、磁探测等方法。
摄像头检测是指在机器人上搭载摄像头,利用其进行拍摄和检测。
超声波检测是利用超声波探头,对管道内部和外部进行探测和检测。
磁探测可以检测管道内或者表面上的磁性材料,判断管道内是否存在隐患或者故障。
以上内容是管道机器人控制及通讯系统和管道检测方面的简单介绍,管道机器人的相关技术还有很大的研究空间和发展潜力。
随着社会的不断发展和进步,管道机器人技术将得到进一步应用和推广,为人们的生产生活带来更多的便利和舒适。
管道CCTV检测机器人,不知道大家用过没有,对于管道CCTV检测机器人的管道CCTV检测的基本方法步骤了解多少?但是如果你真的想要了解管道CCTV检测机器人的话一定要看这篇文章哦。
小编会给大家详细的讲述一下管道机修复机器人的管道CCTV检测的基本方法步骤。
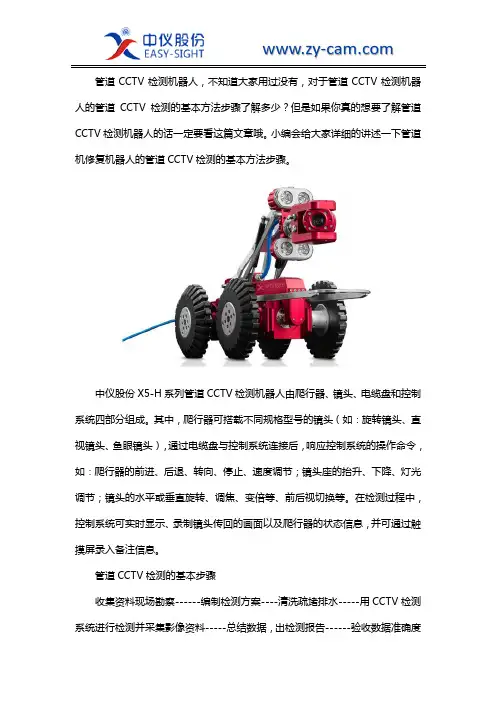
中仪股份X5-H系列管道CCTV检测机器人由爬行器、镜头、电缆盘和控制系统四部分组成。
其中,爬行器可搭载不同规格型号的镜头(如:旋转镜头、直视镜头、鱼眼镜头),通过电缆盘与控制系统连接后,响应控制系统的操作命令,如:爬行器的前进、后退、转向、停止、速度调节;镜头座的抬升、下降、灯光调节;镜头的水平或垂直旋转、调焦、变倍等、前后视切换等。
在检测过程中,控制系统可实时显示、录制镜头传回的画面以及爬行器的状态信息,并可通过触摸屏录入备注信息。
管道CCTV检测的基本步骤收集资料现场勘察------编制检测方案----清洗疏堵排水-----用CCTV检测系统进行检测并采集影像资料-----总结数据,出检测报告------验收数据准确度---提交评估报告。
1、管道检测前搜集的资料如下:该管线平面图。
该管道竣工图等技术资料。
已有该管道的检测资料。
2、现场勘察资料如下:a) 、察看该管道周围地理、地貌、交通和管道分布情况。
b) 、开井目视水位、积泥深度及水流。
c) 、核对资料中的管位、管径、管材。
3、确定检测技术方案:a)、明确检测的目的、范围、期限。
b) 、针对已有资料认真分析确定检测技术方案包括:管道如何封堵、管道清洗的方法、对已存在的问题如何解决、制定安全措施等。
4、管道竣工验收检测前技术要求:a) 、应将管道进行严密性试验,并向检测人员出示该管道的闭气或闭水的试验记录。
b) 、检测前应确保管道内积水不超过管径的5%。
c) 、检测开始前必须进行疏通、清洗、通风及有毒有害气体检测。
那么,管道CCTV检测机器人应该在哪购买呢?大家知道么?现在小编给大家推荐一家专业做管道CCTV检测机器人的公司:武汉中仪物联技术股份有限公司。


已建污水管网修复工程5.3.10.1概述对县城区、荻港镇、新港镇、孙村已建污水管网进行CCTV检测修复、管道清淤及管道修复工作。
其中管道CCTV检测长度为78445.21m,管道清淤量为10138.1m3,管道修复 26673.6m。
5.3.10.2综合排查技术手段目前,管道排查技术主要有:管道机器人、管道潜望镜以及声呐等方法。
下面就三种方法作简要介绍。
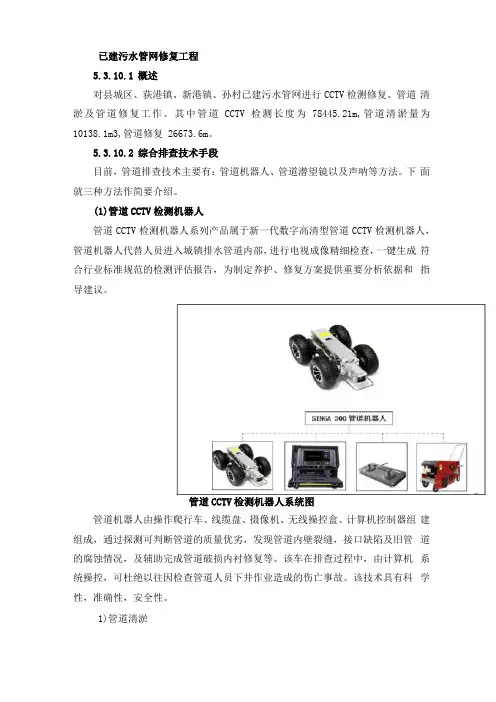
(1)管道CCTV检测机器人管道CCTV检测机器人系列产品属于新一代数字高清型管道CCTV检测机器人,管道机器人代替人员进入城镇排水管道内部,进行电视成像精细检查,一键生成符合行业标准规范的检测评估报告,为制定养护、修复方案提供重要分析依据和指导建议。
管道CCTV检测机器人系统图管道机器人由操作爬行车、线缆盘、摄像机、无线操控盒、计算机控制器组建组成,通过探测可判断管道的质量优劣,发现管道内壁裂缝,接口缺陷及旧管道的腐蚀情况,及辅助完成管道破损内衬修复等。
该车在排查过程中,由计算机系统操控,可杜绝以往因检查管道人员下井作业造成的伤亡事故。
该技术具有科学性,准确性,安全性。
1)管道清淤为了能清楚地了解管道内部的实际情况,对于需要排查的管道内部的水位在管道直径的20%以下才能进行。
所以在实施检查之前,需要先对管道进行封堵、疏通、清淤和排水,然后实施管道机器人检测。
2)管道机器人检查功能特点通过管道机器人在现场发现问题,立即暂停录像。
抓拍缺陷图片,系统自动弹出缺陷描述对话框,进行缺陷选择并描述。
抓拍完成后结束暂停,恢复正常检测录像。
后期制作报告时不用再次进行缺陷判读。
检查过程记录缺陷和缺陷描述爬行车体内置倾角传感器,在管道内部行走时同时采集管道内部的坡度,最后根据采集的数据,软件自动绘制纵向起伏图,以此来判断管道的排水流畅性。
同日的并M <E 又居9.?1的泮S^G.TBDDD^Gh)7, Dftl 6.13也纪一.加排水管道翻向起伏剖面图管民编号 H "比 检渊贴. 可丽背嗣-田寮日检涡I 方向二 管道宜.役山XEjjU m 管道材料陶菽士营-1.23 7.2T 民期直必 IM - UR IM 9. T2 Lk 密T5E - 距蕾ST -1 Li排水管道纵向起伏剖面图缺陷界面例图(2)管道潜望镜管道潜望镜主要用于管道内部情况的快速检测诊断。
紫外光固化法CIPP内衬修复工艺来源于德国,目前已在世界各地得到广泛应用。
作为CIPP修复工艺中的一种,它将碾压好的玻璃纤维软管拉入待修的管道中,用紫外光固化后完成修复,省去了搭架、翻转、用水等环节,实现环保、经济、100%非开挖修复的优越性。
1、紫外光固化法的灵活性和创新性所有的排水管道都是独立的,其管径以及形状都各不相同,对于侵蚀性水流和机械承载能力有特殊要求,另外局部的条件也有较大的差异。
紫外光固化法CIPP非开挖修复一次性可以生产长达500M的软管,即使一段管道内的尺寸有变化,或管道有30°以内的弧度,都可以进行无皱褶修复。
软管适合各种管道:圆形,椭圆形,蛋形,方形等特殊形状,内衬修复范围:从DN150mm至DN1800mm,内衬壁厚从3mm至15mm。
灵活多样、快速、高度的创新能力以及较短的反应时间和独特的解决问题方法,使紫外光固化法CIPP内衬修复工艺在城市管网修复的计划和施工阶段节约大量资源。
2、修复时间短,可立即投入使用从到达现场至完成内衬修复任务:先将管道内的积水排出,接着将碾压好的树脂玻璃纤维软管从深井处拉进要修补的管道内。
由于配置有纵向增强物吸收扭力,增大了抗拉强度,避免了玻璃纤维软管划伤或过度膨胀。
在玻璃纤维软管的一端安置好特殊的固定装置后,使用压缩空气将管子撑开,采用紫外光灯架进行固化。
树脂变硬以后,玻璃纤维内衬管便内覆在下水管道上,它不仅具有密封的功能,还具有加强作用。
管子变硬后,取下固定装置,抽出管子内膜,打开侧面进水口,已损坏的旧管道便修好了。
通常仅需要3—5小时,就可以完成一段旧管道的内衬修复任务,这对于管网改造工作效率的提高是非常有利的。
一旦损坏的管道在进行内衬修复作业后,马上就可以投入运行,这一工艺特点深受业主部门认可。
3、与翻转法CIPP修复工艺的对比与传统的聚酯针刺毡软管用热水固化工艺相比:紫外光固化工艺现场无需水源,设备操作简单,固化时间短。
管道机器人的概况引言管道机器人是指能够在管道内进行巡检、维修和清理等作业的机器人。
随着工业化进程的加快和管道设施的不断增加,传统的人工操作方式已经无法满足管道作业的需求。
因此,管道机器人应运而生,成为管道工程领域中一种重要的技术手段。
管道机器人的分类管道机器人根据其功能和特点,可以分为以下几类:1.巡检机器人:巡检机器人主要用于检测管道内部的故障和异常情况。
它配备有多种传感器,可以实时监测管道的温度、压力、流速等参数,并将这些数据传输给操作人员进行分析和处理。
2.维修机器人:维修机器人主要用于修复管道故障。
它拥有强大的机械臂和工具,可以进行管道的焊接、切割、补漏等维修作业。
同时,维修机器人还具备精确定位和遥控操作功能,可以在狭小的管道内完成复杂的维修任务。
3.清洁机器人:清洁机器人主要用于清理管道内的杂物和积垢。
它配备有高压喷水装置和刷盘装置,可以将管道内的污物冲刷清洁,提高管道的流量和通畅度。
4.安检机器人:安检机器人主要用于检测管道内是否存在危险品或其他安全隐患。
它配备有气体传感器和摄像头等设备,可以实时监测管道内的气体浓度和图像情况,确保管道的安全运行。
管道机器人的工作原理管道机器人通常由机械结构、传感器、控制系统和电源等组成。
其工作原理可以分为以下几个步骤:1.导航定位:管道机器人会通过激光传感器或者摄像头等设备,获取管道内部的地形和障碍物信息,并根据此信息进行导航和定位。
同时,它还可以利用惯性导航、全球定位系统等技术手段进行精确定位。
2.数据采集:管道机器人会通过传感器获取管道内部的各种数据信息,包括温度、压力、流速、气体浓度等参数。
这些数据会被实时传输到控制系统中进行处理和分析,以便操作人员进行决策。
3.作业执行:根据任务需求,管道机器人会配备不同的工具和装置,进行巡检、维修或清洁等作业。
它可以利用机械臂、刷盘装置、喷水装置等工具,完成各种复杂的作业任务。
4.远程监控:管道机器人通常可以与远程监控中心进行联网,将作业情况实时传输给操作人员。
非开挖管道修复更新技术探讨发布时间:2021-09-07T10:14:03.697Z 来源:《城市建设》2021年9月上17期作者:陈西林[导读] 本文围绕管道的非开挖修复,非对开挖管道修复更新技术进行探讨,详细介绍了几种非开挖管道修复技术,并按照修复范围将其进行了分类:辅助修复、局部修复和整体修复。
以深圳市龙岗区某排水管道缺陷项目为依托,阐述了深圳河流域排水管道的非开挖修复技术及修复后的检测与评估,为类似工程项目提供参考。
深圳市市政工程总公司陈西林深圳 60010359[摘要] 本文围绕管道的非开挖修复,非对开挖管道修复更新技术进行探讨,详细介绍了几种非开挖管道修复技术,并按照修复范围将其进行了分类:辅助修复、局部修复和整体修复。
以深圳市龙岗区某排水管道缺陷项目为依托,阐述了深圳河流域排水管道的非开挖修复技术及修复后的检测与评估,为类似工程项目提供参考。
[关键词] 非开挖修复;排水管道;局部修复0 引言“非开挖技术”国际定义为“利用微开挖或不开挖技术对地下管线、管道和地下电缆进行铺设、修复或更换的一门科学”。
自2008年马保松教授首次在国内全面、准确、详细地阐述了非开挖技术的学科性质及研究范畴以来,国内对非开挖工程技术产生了巨大的需求,同时我国市政管网“十二五”发展规划也为非开挖修复技术提供了广阔的应用市场。
目前,城市排水管道缺陷的修复主要有新铺管道和对既有管道进行修复两种方式。
修复既有管道主要是采用非开挖修复技术进行辅助修复、局部修复或整体修复,而新铺管道就是把原管道废弃或更换,采用开挖或非开挖技术(顶管或牵引)新铺一条管道。
排水管道采用何种修复方式,应根据污水管的性质、管材、管位、埋深、需要修复管道损坏情况、地质情况、交通因素以及所属环境来具体确定。
1非开挖管道更新技术分类城市排水管道非开挖修复技术按照其技术和修复范围可分为辅助修复、局部修复和整体修复三大类。
1.1辅助修复辅助修复通过管内向外或地面向下对排水管道周围土体和接口部位及四周井壁注浆,形成隔水帷幕。
国内外管道修复机器人系统组成管道修复机器人简介管道修复机器人由修复部、从动部、电池腔部、控制腔部、驱动部组成。
修复部包括:前端盖、接线腔、传感器、照明灯、摄像机、麦克风。
从动部包括:导向轮组、线嘴组件,导向轮组内圆周均匀分布有导向轮,数量至少为4个。
电池腔部包括:电池腔壳体、电池组、穿墙端子,电池组供电线路通过穿墙端子与控制板腔内的主控制板相连。
控制腔部装有主控制板,集成有电源控制模块、单片机、音、视频隔离器。
摄像机、扬声器、麦克风分别与音、视频隔离器相连,通过光端机将数据传输到地面显示器上;温度传感器与温度变送器相连,温度变送器再通过线缆与电源模块相连;气体传感器通过串口1 与单片机相连,倾角仪通过串口2 与单片机相连,单片机将处理后的数据通过光纤将修复数据传输到地面显示器上;电机驱动板对电机进行正反转控制,电池组为整个系统提供电源。
驱动部内置无刷电机、隔爆腔、驱动外壳、主动锥齿轮、旋转轴、从动锥齿轮、橡胶车轮、主动轴。
无刷电机安装在隔爆腔内部,橡胶车轮上安装有从动锥齿轮,从动锥齿轮与安装在主动轴上的主动锥齿轮相配合,传递扭矩。
管道修复机器人系统的工作过程:尼龙轮安装在转动臂上,通过扭转弹簧提供支撑力,使得橡胶车轮、尼龙轮同时与管道(或救援孔)内壁相接触,由此橡胶车轮、尼龙轮分别与管道(或救援孔)内壁产生摩擦力,无刷电机通电,带动橡胶车轮旋转,通过控制器控制管道机器人的前进、后退、停止。
宁波广强机器人科技有限公司自主研发的DG300普及型管道机器人DG300普及型管道机器人是一套综合运用CCTV、声纳和激光的检测设备,适用于管径300mm-2000mm管道的检测。
对管道的水下部分进行声纳检测,水上部分进行CCTV和激光检测。
可以全面的反应监测管道内部情况,结合数据处理软件可以生成管道的剖面图,分析管道的形变、淤积状况,生成标准检测报告。
已经达到国内一流水平,拥有发明专利的多种埋钉机填补同行业空白。
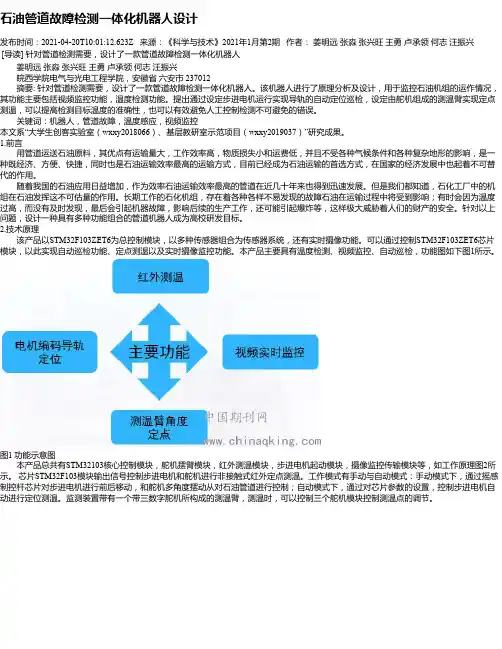
石油管道故障检测一体化机器人设计发布时间:2021-04-20T10:01:12.623Z 来源:《科学与技术》2021年1月第2期作者:姜明远张淼张兴旺王勇卢承领何志汪振兴[导读] 针对管道检测需要,设计了一款管道故障检测一体化机器人姜明远张淼张兴旺王勇卢承领何志汪振兴皖西学院电气与光电工程学院,安徽省六安市 237012摘要: 针对管道检测需要,设计了一款管道故障检测一体化机器人。
该机器人进行了原理分析及设计,用于监控石油机组的运作情况,其功能主要包括视频监控功能,温度检测功能。
提出通过设定步进电机运行实现导轨的自动定位巡检,设定由舵机组成的测温臂实现定点测温,可以提高检测目标温度的准确性,也可以有效避免人工控制检测不可避免的错误。
关键词:机器人,管道故障,温度感应,视频监控本文系“大学生创客实验室(wxxy2018066)、基层教研室示范项目(wxxy2019037)”研究成果。
1.前言用管道运送石油原料,其优点有运输量大,工作效率高,物质损失小和运费低,并且不受各种气候条件和各种复杂地形的影响,是一种既经济、方便、快捷,同时也是石油运输效率最高的运输方式,目前已经成为石油运输的首选方式,在国家的经济发展中也起着不可替代的作用。
随着我国的石油应用日益增加,作为效率石油运输效率最高的管道在近几十年来也得到迅速发展。
但是我们都知道,石化工厂中的机组在石油发挥这不可估量的作用。
长期工作的石化机组,存在着各种各样不易发现的故障石油在运输过程中将受到影响;有时会因为温度过高,而没有及时发现,最后会引起机器故障,影响后续的生产工作,还可能引起爆炸等,这样极大威胁着人们的财产的安全。
针对以上问题,设计一种具有多种功能组合的管道机器人成为高校研发目标。
2.技术原理该产品以STM32F103ZET6为总控制模块,以多种传感器组合为传感器系统,还有实时摄像功能。
可以通过控制STM32F103ZET6芯片模块,以此实现自动巡检功能、定点测温以及实时摄像监控功能。
智能堵漏机器人在管道维修中的应用一、智能堵漏机器人技术概述智能堵漏机器人是一种先进的管道维修技术,它利用现代科技手段,如、机器视觉、传感器技术等,实现对管道泄漏问题的自动检测、定位和修复。
这种机器人的应用,不仅大大提高了管道维修的效率和安全性,还减少了人工成本和维修时间。
1.1 智能堵漏机器人的核心特性智能堵漏机器人的核心特性主要体现在以下几个方面:- 自动化:机器人能够自动完成管道的检测、定位和堵漏工作,减少了人工干预。
- 精确性:通过高精度传感器和先进的算法,机器人能够准确识别泄漏点。
- 适应性:机器人设计有多种适应不同管道环境的功能,如爬行、旋转等。
- 安全性:机器人可以在人类难以到达或危险的环境中工作,保障了维修人员的安全。
1.2 智能堵漏机器人的应用场景智能堵漏机器人的应用场景非常广泛,包括但不限于以下几个方面:- 城市供水管道:用于检测和修复城市供水系统中的泄漏问题。
- 工业管道系统:在化工厂、石油炼制厂等工业领域,用于检测和修复管道泄漏,防止化学物质泄漏造成环境污染。
- 建筑管道:在建筑内部的管道系统中,用于检测和修复泄漏,保障建筑安全。
- 地下管道:在地铁、隧道等地下工程中,用于检测和修复泄漏,确保工程安全。
二、智能堵漏机器人技术的发展历程智能堵漏机器人技术的发展历程是一个不断进步和完善的过程,它涉及到多个领域的技术融合与创新。
2.1 技术起源与早期发展智能堵漏机器人技术的起源可以追溯到早期的自动化设备和遥控技术。
随着计算机技术、传感器技术和的发展,这些设备逐渐具备了智能化的特点。
2.2 关键技术的发展智能堵漏机器人的关键技术包括:- 机器视觉:机器人通过摄像头等视觉传感器获取管道内部图像,进行图像处理和分析。
- 传感器技术:利用压力、温度、声音等多种传感器检测管道的异常情况。
- 算法:应用机器学习和深度学习算法,使机器人能够自主学习和优化堵漏策略。
- 机械臂技术:机器人配备的机械臂可以进行精确的操作,实现堵漏材料的准确放置。
机器人在管道工程中的应用随着科技的不断发展,机器人技术在各个领域都得到了广泛的应用,其中之一就是在管道工程中。
机器人在管道工程中的应用,不仅提高了工作效率,还保证了施工质量和工人的安全。
本文将从机器人在管道巡检、清洁和维修等方面的应用进行详细介绍。
机器人在管道工程中扮演着重要的巡检角色。
传统的管道巡检需要工人进入狭小的空间,存在着一定的危险性。
而机器人巡检可以避免这一风险,提高工作效率。
机器人巡检可以通过携带高清晰度摄像头和传感器等设备,实时监测管道的状况。
通过机器人的视觉系统,工程人员可以远程查看管道内部的情况,及时发现管道破损、堵塞等问题。
机器人巡检还可以进行全方位的数据采集,记录下管道的尺寸、倾斜度等信息,为后续的管道维护提供依据。
除了巡检,机器人在管道工程中还可以进行清洁工作。
传统的管道清洁需要大量的人力和物力投入,工作效率低下且容易受到环境限制。
而机器人清洁可以通过携带高压水枪、刷子等设备,自主完成清洁任务。
机器人清洁可以根据管道的尺寸和材质,调整清洁方式和水压等参数,确保清洁效果和工作安全。
机器人清洁还可以通过激光扫描等技术,检测管道内壁的污垢和结垢程度,提供清洁方案和建议。
机器人清洁不受时间和空间限制,可以在夜间或狭小空间中进行作业,极大地提高了清洁效率。
机器人在管道工程中还可以进行维修和修复工作。
传统的管道维修需要拆除管道和重新安装,工程量大且时间成本高。
而机器人维修可以通过携带焊接机器人、切割机器人等设备,自主完成维修任务。
机器人维修可以根据管道的材质和破损程度,进行精确的焊接、切割和修复工作。
机器人维修还可以通过红外线和超声波等技术,检测管道的渗漏和破损情况,及时采取修复措施。
机器人维修不仅减少了工程时间和人力成本,还提高了维修的准确性和可靠性。
总结起来,机器人在管道工程中的应用,不仅提高了工作效率,还保证了施工质量和工人的安全。
机器人巡检可以实时监测管道的状况,发现问题并提供数据支持;机器人清洁可以高效完成清洁任务,提高清洁效果;机器人维修可以精确修复管道,减少工程成本。
光固化修复系统修复管道操作流程1、插入底膜:在管道机器人检查之后,通过管道机器人或冲洗设备或穿绳器将一个绳子引入管道内,然后使用卷扬机将这个绳子把底膜和拉绳(用于拉软管或牵引机钢丝绳)拉入管道内。
2、软管拉入:在拉入软管之前宜在所有改变牵引方向的井口、管口等处设置滚筒或定滑轮,滚筒或定滑轮宜采用丝杠定位并固定。
软管拉入过程中可能与其它物体直接接触处宜衬垫保护垫膜。
3、绑扎头:软管两端应各安装一个扎头。
4、一次充气:(1)充气前请确保井下无作业人员;(2)充气过程应按0.02至0.03Bar/min的速度缓慢充气,当压力达到0.2至0.3bar 时,持续保压20至40min,保证软管充分涨开;(3)在保压阶段应将软管中的预置绳拉出,置换为耐高温的细绳,用于拉灯架;(4)在保压阶段应完成灯架的功能测试及灯架高度的调节,并套上对应管径的内膜。
5、放修复灯架:(1)关闭充气后打开结束井扎头盖板,将灯架上的内膜套到扎头上,同时将高温绳系到灯架上;(2)由井上人员用手扎紧灯架尾端内膜,同时开始充气;(3)当软管被撑开后,在靠近扎头端的内膜上开一个气孔,方便下手调整灯架放入时的位置,同时通知开始井端的操作人员用高温绳缓慢拉灯架进入软管;(4)当灯架尾部进入扎头后,停止拉绳,同时关闭充气,将电缆线从扎头盖板中间穿过,并将电缆线尾部与灯架连接,盖上扎头盖板打紧;(5)开始井和结束井两端操作人员,对扎头上的绑带再次进行打紧加固操作;6、二次充气:(1)软管二次充气的最终压力应能是软管充分膨胀并紧贴旧管道内壁,最终压操作压力值大小根据管径不同而有所不同,详细请见修复参数表;(2)打开摄像头,收紧电缆线,标记电缆线的起始位置,并将软件上的距离值清零;(3)当二次充气达到操作压力值时,应牵引灯架行走,通过摄像头观察软管涨开情况;(4)有未完全涨开区域时,紫外灯架不宜强行通过,可适当提高充气压力;(5)确认软管完全涨开后,紫外灯架应在开始井的软管一端就位;(6)二次充气上升到操作压力值时,应进行保压控制,直到软管固化完成。
排水管道紫外光原位固化法修复技术应用程文哲发布时间:2023-07-28T10:39:47.349Z 来源:《工程建设标准化》2023年8期作者:程文哲[导读] 我国城市化进程不断加快,地下管线系统也越来越复杂。
针对排水管道的损坏问题,采用紫外光原位固化法对其进行修复,不仅速度快、效率高,还不会影响人们的正常生活,不会对周围环境造成破坏。
基于此,本文针对紫外光原位固化法在排水管道中的应用展开探讨。
上海誉帆环境科技股份有限公司 200335摘要:我国城市化进程不断加快,地下管线系统也越来越复杂。
针对排水管道的损坏问题,采用紫外光原位固化法对其进行修复,不仅速度快、效率高,还不会影响人们的正常生活,不会对周围环境造成破坏。
基于此,本文针对紫外光原位固化法在排水管道中的应用展开探讨。
关键词:紫外光原位固化法;排水管理;修复因为年久失修等系列原因,排水管道可能会发生不同程度的功能性或结构性损坏。
而城市建设中,排水系统、燃气系统、电信系统等各种管线敷设错综复杂,这就给排水管道的修复工作造成了一定难度。
采用紫外光原位固化法,通过牵拉的方式将浸渍光敏树脂的软管置入排水管道内,应用紫外光照射固化,形成新的管道内衬,该方法不仅适用于各种结构性缺陷的修复,还能将对环境、居民生活的影响降到最低[1]。
1 紫外光原位固化法的原理及特点1.1 紫外光原位固化法的原理该方法属于一种非开挖技术,尤其适用于管道整体的腐蚀、渗漏等问题。
具体的操作过程是在玻璃纤维管涂上树脂,而后借助卷扬机拖入管道内,通风和紫外光照射固化,如此玻璃纤维慢慢硬化,形成新的管道内衬。
在采用该方法时,加热的紫外光波必须在320mm-390nm的范围,如此才能促使引发剂分解,进而产生树脂化学反应,使得其快速形成固化膜,从而达到修复的目的。
该方法不需要开挖,但是对作业人员的操作水平要求较高。
1.2 适用范围及特点该方法适用于各种形状的管道,如圆形、马蹄形等,且不受管道材质的影响,需要管道的管径在15cm-160cm的范围内。
摘要在石油管道中存在管道环焊缝不能处理的情况,严重影响了管道的寿命。
单节管道的腐蚀直接影响整个管道的运输。
因此,管道机器人在管道焊缝处理方面有很好的前景。
在轮式机器人的基础上,设计开发了一种新的管内移动机器人行走机构.机器人的3组驱动轮沿圆周方向成120°均匀分布,3个驱动电动机通过齿轮副直接驱动3组驱动轮,调节电动机通过新型的丝杠螺母副和压力传感器使3组驱动轮始终以稳定的正压力紧贴在管道内壁,使机器人具有充裕并且稳定的牵引力.对各个零件都做了详细的分析设计。
使该机器人机构紧凑,工作可靠,适用于管径为 400~600 mm 的管道。
使管道机器人的牵引力达到1470N。
移动速度达到83.33m/min。
满足了管道机器人的牵引力及速度的要求。
关键词:石油管道;行走设计;适应管径;驱动原理AbstractExisting in the pipeline oil pipeline of possible girth weld can't handle, and this seriously influences the pipe life single quarter pipe directly affected the whole pipeline Transportation, therefore, the transportation in pipe welds processing pipeline robot has a good prospect.This paper introduces the design of a carry pipe welds processing device for oil pipeline adapt to the diameter of in-pipe robot400~600mm walk to a new design of the device the diameter of screw nut pair way to make adjustment to the pipeline robot to 1470N traction movement speed 83.33 m/min satisfy the pipe robots traction and speed requirements.This paper introduces the oil pipeline robot structure and working principle. Puts forward new screw nut pair diameter of institutions, to use is to screw rotation nut mobile way. Design the abrasion resistance calculation, screw strength calculation and screw stability calculation. And designed a gear parts design related. Analyses the stress of the stem. Designed with gear drive way directly, first according to gear surface contact fatigue strength design and calculation, and then checked for fatigue broken teeth tooth root bending fatigue strength. In this process also involves gear axle design and axle, gears connect the design of the key and motor choice.KeyWords:Oil pipeline; Walk design; Adapt diameter; Driving principle目录摘要 ............................................................................................................................ I Abstract ......................................................................................................................... II 1 绪论 (1)1.1管道机器人概述 (1)1.2 管道机器人的发展现状 (1)1.2.1管道机器人的国外发展现状 (1)1.2.2管道机器人的国内发展现状 (2)1.3研究的主要内容 (2)1.4设计要达到的要求 (2)2 现有工作装置的行走原理 (3)2.1 实现管内行走的基本条件 (3)2.2不同移动方案的分析与比较 (3)2.2.1履带驱动 (3)2.2.2直进轮式微型管道机器人的移动机构 (4)2.2.3蠕动驱动管道机器人 (5)2.2.4螺旋推进管道机器人 (6)2.2.5足式管道机器人 (6)2.3移动方案的确定 (7)3 管道机器人适应管径的原理 (8)3.1适应管径变化的三种调节机构 (8)3.1.1蜗轮蜗杆调节方式 (8)3.1.2升降机调节方式 (9)3.1.3滚珠丝杠螺母副调节方式 (9)3.2新型的丝杠螺母调节机构 (10)4 丝杠螺母调节机构的总体设计 (12)4.1丝杠上螺母与驱动轮压力的关系 (12)4.2 BK杆上的力的计算 (13)4.3机器人弯道通过性分析 (14)4.4机器人调节机构的杆长分析 (15)4.5调节机构的杆长及参数的计算 (16)4.6正压力N的计算 (18)4.6.1机器人重量 (18)4.6.2机器人速度与加速度 (18)4.6.3机器人的驱动轮与管道内壁正压力的计算 (18)4.7计算丝杠上的力 (18)5 丝杠设计 (19)5.1 螺旋传动 (19)5.2螺旋传动的特点 (19)5.3螺杆的设计 (19)5.3.1 螺距p的确定 (20)5.3.2 螺杆公称直径d的确定 (20)5.3.3 螺杆长度的确定 (20)5.3.4螺杆的传动效率的确定 (20)5.4 螺杆的各项参数的确定 (20)5.4.1 耐磨性计算 (20)5.4.2螺纹的强度校核 (22)5.4.3螺杆的强度校核 (23)5.4.4螺杆稳定性的校核 (23)5.5丝杠上扭矩的确定 (24)6 螺旋传动的电机的选择 (25)6.1步进电机的特点 (25)6.2步进电机规格的选择 (25)6.3选择具体使用的电机 (26)7弹簧的设计 (27)7.1弹簧的设计 (27)7.1.1选择弹簧材料 (27)7.1.2计算曲度系数K (27)7.1.3计算弹簧中径D (27)27.1.4求所需弹簧的圈数n (27)7.2验算稳定性 (28)7.2.1取弹簧节距t (28)7.2.2计算弹簧的自由高度H (28)7.2.3判断弹簧稳定性 (28)7.3计算单根丝杠的长度 (28)8 驱动的原理 (29)8.1驱动电机的选择 (29)8.2移动载体方式有 (29)8.2.1单驱动管内移动载体 (29)8.2.2双驱动管内移动载体 (30)8.2.3三驱动管内移动载体 (30)8.3传动比的确定 (31)8.4小齿轮的设计及校核 (31)8.4.1选择齿轮材料及其热处理并确定初步参数 (31)8.4.2按齿面接触疲劳强度设计齿轮的主要参数 (32)8.4.3校核齿根弯曲疲劳强度 (33)9具体驱动电机的选择 (35)10 其他零件的选择 (36)10.1电机与齿轮之间的键的设计 (36)10.2电池的选择 (36)10.3丝杠与步进电机连接的联轴器的选择 (36)10.4驱动轮的选择 (37)10.5丝杠上轴承设计 (37)10.6 支撑滑动杆的导轨设计 (38)总结 (40)参考文献 (41)致谢 (43)附录A装配图 (44)1 绪论1.1管道机器人概述管道机器人是一种可沿管道内部或外部移动,携带一种或多种传感器及操作器(如CCD摄像机、位置和姿态传感器、超声传感器、涡流传感器、管道清理装置、管道裂纹及管道接口焊接装置、防腐喷涂装置、简单的操作机械手等),在操作人员的遥控操作或计算机的自动控制下,能够进行一系列管道作业的机电一体化系统。
在民用给排水方面,20世纪90年代以前埋设的金属管道,大部分未做内防腐,导致管道内壁结垢,个别腐烂穿孔,严重影响供水水质。
如何简单又经济地维修地下管线成了摆在人们面前的问题。
在此背景下,施罗德工业集团采用CIPP紫外光固化非开挖修复技术赢得了广大管道从业者的青睐。
施罗德工业集团的非开挖管道修复设备源自德国最新技术进步成果,开创式的配电设计,可以上UV灯链支持拓展延长,固化效率提升1/3以上。
同时设备可采用电脑程序控制或独立的PLC系统控制。
在突发事故中,平板电脑发生故障,操作人员可采用手动控制UV固化施工,保证工程进度和质量以及施工人员安全。
紫外光固化设备在排水管道修复上主要应用在市政排水重力管道上,可以解决管道坍塌、变形、脱节、渗漏、腐蚀等难题。
另外还可以用于市政供水、工业冷却用水、燃油燃气管道修复(压力管道)上,能解决管道腐蚀、渗漏、开裂等修复难题。
采用的材料无毒无害且抗腐蚀,应用环境局限性小。
功能优势1.采用650W UVA特种紫外光固化灯替代传统400W/650W 的LCR低配UV固化灯,固化修复效率增加1/3以上。
2.UV灯架上携带3种不同规格传感器,分别探测内衬管壁和空气温度,给UV固化速度的精确设置提供参考数据。
3.用于DN1200以下管径的UV修复系统对卡车要求低,占用尺寸小(1200 x 740 x 1260 mm)。
4.防震式设计,无需采用集装箱即可安全可靠的搭载在修复车上。
5.灯链采用单节可拆分的铝合金轻质灯架设计,PNP即插即用式快速接头,方便操作人员在检查井种拼接灯链,降低操作体力劳动强度。
6.简单易用的控制系统,新手经过2-3小时培训后即可独立操作设备。
设备源自CIPP非开挖修复发明者INSITUFORM的48年技术积累,在通过 ISO 9001:2008 标准认证的海外工厂制造。
垂直整合型企业,施罗德工业集团负责从研发、制造、安装到服务的整个过程,能够根据项目需求量身订制软管的形状、尺寸和强度,覆盖全国的销售与技术支持服务网络。
城市管道机器人是一种可沿细小管道内部或外部自动行走、携带一种或多种传感器及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统。
管道修复机器人分为管道检测系列,管道养护系列,管道修复系列三大类。
下面就管道修复系列的管道机器人系统为您做详细讲解。
管道修复机器人,便携式光固化管道修复系统由移动式控制系统、传输电缆、紫外光灯架、高清镜头及辅助工具等组成。
主要适用于市政管网非开挖修复工程,修复管径DN200-DN1600。
X120-D可控点位修复系统,可控点位修复系统主要由主控系统和气囊两部分组成,其主要的特点是高效、稳定、精准、可控,8分钟可修复一个破损点。
这款管道修复机器使用于市政(工业)排水管道。
主要用于排水管道点位缺陷点的修复,根据不同的管径选择规格对应的气囊,对破损点进行精准的修复。
X120-UV便携式光固化修复系统,由移动式控制系统、传输电缆、紫外光灯架、高清镜头及辅助工具等组成。
主要适用于市政管网非开挖修复工程,修复管径DN200-DN1600。
体积小、重量轻、外接发电机即可工作;同时又可与车辆分离,在狭小街道作业。
管道机器人之便携式光固化修复系统产品特点如下:
1. UV灯架
2.发光效率高,是传统灯管3倍以上,冷光源,无热辐射。
3.无红外辐射,无有害气体产生符合ROHS标准,无炸裂飞溅,更安全环保;
4.采用LED点阵光源、模块化集成固定、免拆装、寿命长、低功耗、快捷安全;操作系统
5.智能式操作系统,修复过程可视,前后视双高清视频,自动恒压,操作简单,易学易用;
6.控制主机,采用可移动式控制柜,高度集成,内置风机,体积小巧,轻便易携,整机体积和重量约为传统设备的1/2至1/3;
以上是关于管道机器人可控点修复系列产品的相关介绍。
武汉中仪物联技术股份有限公司是一家以排水管网检测、评估、养护、修复相关技术、设备及材料研发制造为核心产业的高新技术企业,专注于为城市提供智慧排水管网运维信息化整体解决方案。
更多关于管道机器人的问题欢迎来电咨询交流。