机器人学 微分变换
- 格式:pptx
- 大小:921.40 KB
- 文档页数:30
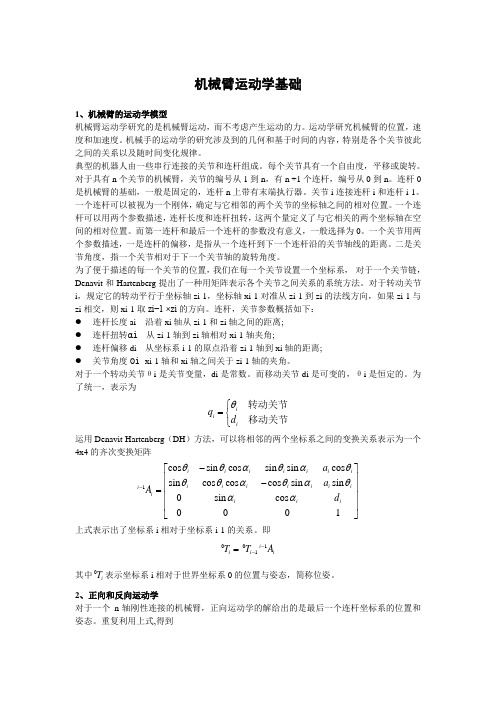
机械臂运动学基础1、机械臂的运动学模型机械臂运动学研究的是机械臂运动,而不考虑产生运动的力。
运动学研究机械臂的位置,速度和加速度。
机械手的运动学的研究涉及到的几何和基于时间的内容,特别是各个关节彼此之间的关系以及随时间变化规律。
典型的机器人由一些串行连接的关节和连杆组成。
每个关节具有一个自由度,平移或旋转。
对于具有n 个关节的机械臂,关节的编号从1到n ,有n +1个连杆,编号从0到n 。
连杆0是机械臂的基础,一般是固定的,连杆n 上带有末端执行器。
关节i 连接连杆i 和连杆i-1。
一个连杆可以被视为一个刚体,确定与它相邻的两个关节的坐标轴之间的相对位置。
一个连杆可以用两个参数描述,连杆长度和连杆扭转,这两个量定义了与它相关的两个坐标轴在空间的相对位置。
而第一连杆和最后一个连杆的参数没有意义,一般选择为0。
一个关节用两个参数描述,一是连杆的偏移,是指从一个连杆到下一个连杆沿的关节轴线的距离。
二是关节角度,指一个关节相对于下一个关节轴的旋转角度。
为了便于描述的每一个关节的位置,我们在每一个关节设置一个坐标系, 对于一个关节链,Denavit 和Hartenberg 提出了一种用矩阵表示各个关节之间关系的系统方法。
对于转动关节i ,规定它的转动平行于坐标轴zi-1,坐标轴xi-1对准从zi-1到zi 的法线方向,如果zi-1与zi 相交,则xi-1取zi−1 ×zi 的方向。
连杆,关节参数概括如下: ● 连杆长度ai 沿着xi 轴从zi-1和zi 轴之间的距离; ● 连杆扭转αi 从zi-1轴到zi 轴相对xi-1轴夹角;● 连杆偏移di 从坐标系i-1的原点沿着zi-1轴到xi 轴的距离; ● 关节角度θi xi-1轴和xi 轴之间关于zi-1轴的夹角。
对于一个转动关节θi 是关节变量,di 是常数。
而移动关节di 是可变的,θi 是恒定的。
为了统一,表示为i i iq d θ⎧=⎨⎩转动关节移动关节运用Denavit-Hartenberg (DH )方法,可以将相邻的两个坐标系之间的变换关系表示为一个4x4的齐次变换矩阵1cos sin cos sin sin cos sin cos cos cos sin sin 0sin cos 01i i i i i i i i i ii ii i i i iii a a A d θθαθαθθθαθαθαα--⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦上式表示出了坐标系i 相对于坐标系i-1的关系。


微分几何在机器人中的应用微分几何是运用微积分的理论研究空间的几何性质的数学分支学科。
古典微分几何研究三维空间中的曲线和曲面,而现代微分几何开始研究更一般的空间----流形。
微分几何学以光滑曲线(曲面)作为研究对象,整个微分几何学是由曲线的弧线长、曲线上一点的切线等概念展开的。
微分几何是研究一般曲线和一般曲面的有关性质,平面曲线在一点的曲率和空间的曲线在一点的曲率就是微分几何中重要的讨论内容,计算曲线或曲面上每一点的曲率要用到微分的方法。
微分几何在力学和一些工程技术问题方面有广泛的应用,如机械齿轮啮合理论应用方面,充分应用了微分几何学的理论。
机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物,一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。
目前机器人的任务是协助或取代人类工作的工作,其中最主要的是代替人类完成上肢动作。
因此,机械手是机器人完成操作指令的机构,其最基本的组成部分是手臂和手,一般采用空间开链连杆机构,其中的运动副(转动副或移动副)常称为关节,关节的个数通常反映机器人的自由度数。
根据关节配置型式和运动坐标形式的不同,机器人执行机构手臂的动作形态以微分几何来划分,可分为直角坐标式,圆柱坐标式,极坐标式和关节坐标式。
描述手指动作的曲线用到微分几何的frenet公式,即用曲线的切向量、方向量、和这两个向量都垂直的向量来研究、描述。
机器人根据功能需求不同可分为家务型,操作型,程控型,数控型和搜救型等,其中,家务型和搜救型要求机器人具有一定程度的移动行走能力。
对此,机器人移动功能的实现同样需要微分几何理论的应用。
因此,微分几何理论实现机器人方面的研究应用具有重大作用。
微分几何在机器人中的应用主要体现在民用,现代和工业三方面,其中礼仪机器人则是民用方面的典型代表,该机器人以仿人为目的,实现行走,作业和识别外界环境。
工业机器人方面的应用不胜枚举,如排爆机器人,搜救机器人等。
以下列举描述微分几何在机器人中的应用。

第七章 机器人动力学的凯恩方法7.1 引言机器人动力学凯恩方程方法是建立在凯恩动力学方程基础上的,因而本章首先介绍凯恩动力学方程。
7.1.1 质点系的凯恩动力学方程设一质点系具有n 个质点,该质点系的动力学普遍方程为()[]01=⋅-∑=ni i i i ir a m fδ (7-1)式中 i f ——作用于第i 质点主动力矢量;i m ——质点i 的质量;i a ——质点i 的加速度矢量;i r ——质点i 在参考坐标系中的位置矢量;i r δ——质点i 的微分位移;“·”——数量积符号。
设质点系为完全系,即它具有l 个自由度和l 个广义坐标,则()t q q q r r li i (21)= (7-2)式中 i q ――广义坐标;t ——时间变量; 质点i 的线速度为j lj q i j l j j i i i q v q q r dt r v j ∑∑===⎪⎪⎭⎫ ⎝⎛∂∂=∂=1.1 式中j i j i q i qvq r v j ∂∂=∂∂=. (7-3)凯恩(kane )定义,j i q i j v v q =∂∂为质点I 相对于广义速度的偏速度。
微分i r δ可表示为j lj q i j lj j ii q v q q r r j δδδ∑∑===∂∂=1.1 (7-4)将(7-4)代入(7-1)式,得(), 110j ll i i i i q j i j f m a v q δ==⎡⎤-⋅=⎢⎥⎣⎦∑∑ 交换求和符号,得(), 110j ln i i i i q j i j f m a v q δ==⎡⎤-⋅=⎢⎥⎣⎦∑∑因为j q 是独立变量,故(), 10j nii i i q j fm a v =-⋅=∑ j=1,2,...,l (7-5) 或, , 110j j nnii q i i i q j i fv m a v ==⋅-⋅=∑∑这就是质点系的凯恩动力学方程(Kane Dynamics Equation ),可以改写为', 1', 101,2,,_______j j j j nj i i q i n j i i i q i F j l F f v F m a v F ==⎫⎪+==⋅⋅⋅⎪⎪=⎬⎪⎪=⎪⎭⋅⋅∑∑广义主动力广义惯性力 (7-6)7.1.2 刚体的凯恩动力学方程如图7-1所示将刚体看成是由n 个质点组成的。


关于机器人坐标系的微分变换对于机器人的坐标系的微分变换则是指微分平移和微分旋转运动的合成。
假设用T标示原始坐标系,并且假定由于微分变换所引起的坐标系T的变换用dT来表示,则:[T+dT]=[Trans(dx,dy,dz)Rot(k,dθ)][T]移项后可得到:[dT]=[Trans(dx,dy,dz)Rot(k,dθ)-I][T]其中,I是单位矩阵,[dT]表示微分变换后坐标系的变换。
则[dT]=[Δ][T][Δ]=[Trans(dx,dy,dz)Rot(k,dθ)-I]Δ称之为微分算子。
ps:对于微分平移,就是坐标系平移一个微分量,可以使用Trans(dx,dy,dz)来表示,其含义是坐标系沿着三个轴做了微小的运动。
对于微分旋转,就是坐标系的小量旋转,可以使用Rot(k,dθ)来描述,即坐标系绕k轴转动了dθ角度。
由于转动量非常的小,可以做近似处理。
假设绕x,y,z轴的微分转动分别定义为σx,σy,σz。
则sin(σx)=σx 其中σx为弧度。
cos(σx)=1在矩阵运算中,矩阵乘法对于顺序有严格的要求。
不同的顺序计算得到的结果通常也相同。
Rot(x,σx)=[1 0 0 0;0 1 -σx 0;0 σx 1 0;0 0 0 1];Rot(y,σy)=[1 0 σy 0;0 1 0 0;-σy 0 1 0;0 0 0 1];Rot(z,σz)=[1 -σz 0 0;σz 1 0 0;0 0 1 0;0 0 0 1 ];虽然上面三个式子与每个分量的单位长度为1的规定不相符。
由于微分的值非常的小,因此,可以忽略高次项。
对于Rot(x,σx)Rot(y,σy)与Rot(y,σy)Rot(x,σx)相乘的结果忽略高次项之后,即高次项为0。
则两式的结果相同。
因此,在微分运动中,可以认为相乘的顺序可以互换。
接上,由于Δ是相对于固定坐标系的微分算子。
假设相对于当前坐标系的微分算子为TΔ。
因为相对于固定坐标系为左乘,相对于动坐标系为右乘。



For personal use only in study and research; not for commercial use其余的比较简单,大家可以自己考虑。
3. 坐标系}B {的位置变化如下:初始时,坐标系}A {与}B {重合,让坐标系}B {绕B Z 轴旋转θ角;然后再绕B X 旋转φ角。
给出把对矢量P B 的描述变为对P A描述的旋转矩阵。
解: 坐标系}B {相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
∴对P A 描述有 P T P BA B A = ;其中 ),(),(φθx Rot z Rot T A B = 。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系}{1111z y x o 、}{2222z y x o ,与2个楔块相固联。
图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:)90,()90,(1z Rot y Rot T = ; 对楔块2进行的变换矩阵为:)180,()90,()90,()4,0,3(oo 02o 2z Rot x TRot z Rot Trans T --= ;其中 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=100001005010000102T ;所以 :⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=10000010000101001T ;⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡--=10004010000121002T 对楔块2的变换步骤:① 绕自身坐标系X 轴旋转︒90; ② 绕新形成的坐标系的Z 轴旋转︒180; ③ 绕定系的Z 轴旋转︒-90; ④ 沿定系的各轴平移)4,0,3(-。
方法2:如图建立两个坐标系}{1111z y x o 、}{2222z y x o 与参考坐标系重合,两坐标系与2个楔块相固联。







其余的比较简单,大家可以自己考虑。
3. 坐标系{B}的位置变化如下:初始时,坐标系{A}与{B}重合,让坐标系{B}绕描述AB的描述变为对PZ轴旋转角;然后再绕X B旋转角。
给出把对矢量PB的旋转矩阵。
解:坐标系{B}相对自身坐标系(动系)的当前坐标系旋转两次,为相对变换,齐次变换顺序为依次右乘。
A;对P A A B描述有P T PBA其中T Rot(z,)Rot(x,)B。
9. 图2-10a 示出摆放在坐标系中的两个相同的楔形物体。
要求把它们重新摆放在图2-10b 所示位置。
(1)用数字值给出两个描述重新摆置的变换序列,每个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每个从右至左的变换序列。
(3)作图说明每个从左至右的变换序列。
解:(1)方法1:如图建立两个坐标系{1x y z}o2x y z,与2个楔块相固联。
o、{}111222图1:楔块坐标系建立(方法1)对楔块1进行的变换矩阵为:T1Rot(y,90)Rot(z,90);对楔块2进行的变换矩阵为:o0o o T2Trans(3,0,4)Rot(z,90)TRot(x,90)Rot(z,180);21000其中01052T;0010000100100012所以:1000T;10100T2114 00010001对楔块2的变换步骤:①绕自身坐标系X轴旋转90;②绕新形成的坐标系的Z轴旋转180;③绕定系的Z轴旋转90;④沿定系的各轴平移(3,0,4)。
方法2:如图建立两个坐标系{o1x y z}、{o2x2y2z2}与参考坐标系重合,两坐标系111与2个楔块相固联。
图1:楔块坐标系建立(方法2)对楔块1进行的变换矩阵为:T1Rot(y,90)Rot(z,90);对楔块2进行的变换矩阵为:o o oT2Trans(2,0,9)Trans(4,0,0)Rot(y,90)Rot(x,180)Rot(z,90);00100012所以:1000T;101001000T。
中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
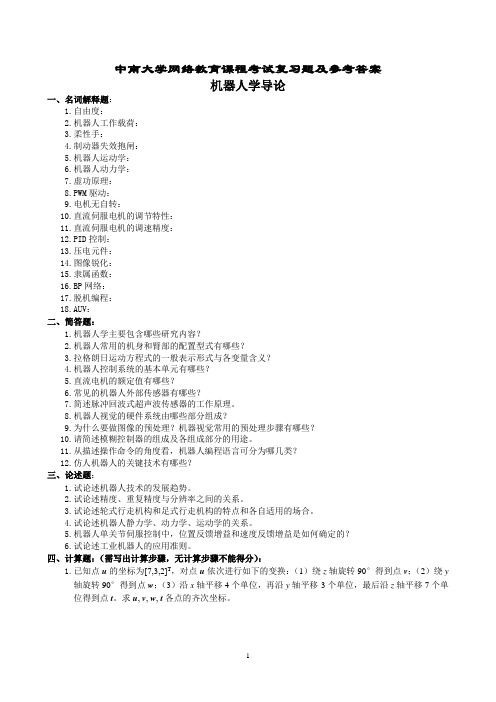
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
