循迹小车传感器选择
- 格式:doc
- 大小:3.90 MB
- 文档页数:10

基于STM32的循迹小车设计-毕业论文摘要本文介绍了基于STM32的循迹小车设计。
首先,对循迹小车的背景和意义进行了阐述,并分析了目前市场上常见的循迹小车的设计方案和存在的问题。
接着,详细介绍了本文的设计思路和具体实现方法,包括硬件设计和软件编程。
最后,对设计进行了测试和验证,并对测试结果进行了分析和总结。
实验结果表明,本文设计的循迹小车具有良好的循迹性能和稳定性,可以广泛应用于工业生产、物流配送等领域。
引言随着科技的不断进步和社会的发展,智能机器人被广泛应用于各个领域。
循迹小车作为智能机器人的一种,具有自主移动、感知环境等功能,受到了越来越多的关注。
循迹小车是一种可以根据指定的路径进行移动的智能机器人。
它能够利用传感器和控制算法,实现沿着特定轨迹行驶的功能。
循迹小车在工业生产、物流配送、仓储管理等领域具有广阔的应用前景。
目前市场上常见的循迹小车设计方案存在一些问题,如循迹精度不高、稳定性差、成本较高等。
因此,设计一种基于STM32的循迹小车成为了当今研究的热点之一。
本文旨在设计一种基于STM32的循迹小车,以提高循迹精度、增强稳定性、降低成本。
通过对循迹小车相关技术的研究和实验验证,可以为循迹小车的进一步发展和应用提供参考。
设计思路本文设计的基于STM32的循迹小车主要包括硬件设计和软件编程两个部分。
硬件设计硬件设计部分主要包括传感器选型、电路设计和机械结构设计。
首先,为了实现循迹功能,选择了红外线传感器作为循迹小车的感知模块。
红外线传感器具有反射率高、响应快的特点,适合用于循迹小车的设计。
其次,根据传感器的特性和需求,设计了传感器与电路之间的连接方式。
通过合理布置电路板和传感器,可以有效提高循迹小车的循迹精度和稳定性。
最后,设计了循迹小车的机械结构。
机械结构应具有稳固性、灵活性和可拓展性,以适应不同场景的应用需求。
软件编程软件编程部分主要包括传感器数据处理、控制算法设计和系统化编程。
首先,通过学习和理解红外线传感器的工作原理,编写了传感器数据采集和处理的程序。
智能循迹避障小车设计智能循迹避障小车的核心功能在于能够沿着特定的轨迹行驶,同时能够避开行驶过程中遇到的障碍物。
要实现这两个功能,需要在硬件和软件两个方面进行精心设计。
在硬件方面,首先是小车的车体结构。
通常选用坚固且轻便的材料,以保证小车的稳定性和灵活性。
车轮的选择也很重要,需要具备良好的抓地力和转动性能。
传感器是实现智能循迹避障功能的关键部件。
对于循迹功能,常用的是光电传感器或摄像头。
光电传感器通过检测地面上的反射光来判断轨迹,而摄像头则可以通过图像识别技术获取更精确的轨迹信息。
在避障方面,超声波传感器或红外传感器是常见的选择。
超声波传感器通过发射超声波并接收反射波来测量与障碍物的距离,红外传感器则通过检测障碍物反射的红外线来实现避障功能。
控制模块是小车的大脑,负责处理传感器采集到的数据,并控制电机的运转。
常用的控制芯片有单片机,如 Arduino 或 STM32 等。
电机驱动模块则用于将控制模块输出的信号转换为电机所需的驱动电流,以实现小车的前进、后退、转弯等动作。
电源模块为整个小车系统提供稳定的电力供应。
一般选择可充电的锂电池,其具有较高的能量密度和较长的续航能力。
在软件方面,编写高效可靠的程序是实现智能循迹避障功能的关键。
首先是传感器数据的采集和处理程序。
对于光电传感器或摄像头采集到的轨迹信息,需要进行滤波、放大等处理,以提高数据的准确性和可靠性。
对于超声波传感器或红外传感器采集到的避障数据,需要进行距离计算和障碍物判断。
控制算法是软件的核心部分。
对于循迹功能,常用的算法有 PID 控制算法。
通过不断调整电机的转速和转向,使小车能够准确地沿着轨迹行驶。
对于避障功能,通常采用基于距离的控制策略。
当检测到障碍物距离较近时,及时控制小车转向或停止,以避免碰撞。
电机控制程序负责根据控制算法的输出结果,精确控制电机的运转。
这需要对电机的特性有深入的了解,以实现平稳、快速的运动控制。
为了提高小车的性能和稳定性,还需要进行系统的调试和优化。
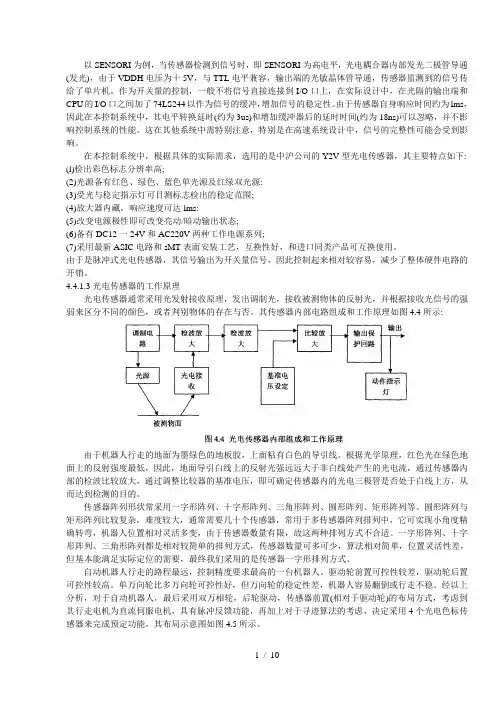
循迹小车原理循迹小车(LineTrackingCar)是一种由电机驱动的机器人的智能小车,用来完成自动驾驶任务。
它的基本原理是通过传感器检测光线反射强度,再通过算法来控制电机运转,从而实现无人自动导航。
因此,其主要技术要素为,传感器、光强度检测框架、运动控制算法和运动系统组件等。
循迹小车的传感器循迹小车使用的传感器主要有光敏电阻、红外传感器、超声波传感器、电眼传感器等,其中光敏电阻是最常用的一种传感器。
它能够感知反射光强度的变化,从而实现循迹小车的运动。
它的信号线由电路芯片组成,并且能够将电压转换为电信号,并由电路板传递到主控单元,最终由控制系统进行处理。
循迹小车的光强度检测框架光强度检测框架是循迹小车机器人运动控制中很重要的一个环节,它将传感器探测到的光强度变化转换为特定的数值,用于控制小车的行走方向和方式。
在做光强度检测框架时,可以根据小车设计的参数,确定路径中的若干个固定点,可以将这些点进行编号,再按照特定的顺序进行检测,如:采用从底部到顶部的方式,进行依次检测,可以有效地完成小车的路径规划。
循迹小车的运动控制算法运动控制算法是循迹小车中重要组成部分,它是控制小车机器人运动的核心算法,用于确定小车运动的方向和动作,从而实现跟随路径的行走。
常见的循迹小车控制算法有老鼠算法,动态规划算法,RANSAC算法,模糊控制算法,改进的蚁群算法等。
老鼠算法,是一种使用机器人的最简单的算法,基本思想是通过不断的前行,然后再根据所遇到的环境做出右转或左转的决策。
动态规划算法,是一种贪心算法,它计算每一步直接决策,以实现最优解。
RANSAC算法,是一种基于概率的算法,它基于模型快速迭代采样,以找出有效数据并通过迭代重新估计参数。
模糊控制算法,是一种数学分析技术,它将概率和关联度结合起来,以实现模糊决策。
改进的蚁群算法,是一种基于智能的算法,它基于人类的行为,以实现小车路径的优化。
循迹小车的运动系统组件运动系统组件是循迹小车机器人的控制系统的重要组成部分,它包括:电机控制器、电机驱动器、轮胎组件和电源组件等。
4路循迹传感器模块使用说明 一模块描述此模块是为智能小车 、 机器人等自动化机械装置提供一种多用途的红外线探测系统的解决方案 。
该传感器模块对环境光线适应能力强 , 其具有一对红外线发射与接收管 , 发射管发射出一定频率的红外线 , 当检测方向遇到障碍物 ( 反射面)时 , 红外线反射回来被接收管接收 , 经过比较器电路处理之后 , 同时信号输出接口输出数字信号(一个低电平信号) ,可通过电位器旋钮调节检测距离,有效距离范围2 ~ 6 0cm ,工作电压为3.3V-5V 。
该传感器的探测距离可以通过电位器调节、具有干扰小、便于装配、使用方便等特点,可以广泛应用于机器人避障 、 避障小车、流水线计数及黑白线循迹等众多场合。
二模块参数说明1当模块检测到前方障碍物信号时,电路板上红色指示灯点亮,同时OUT端口持续输出低电平信号 , 该模块检测距离2~60cm, 检测角度35 °, 检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器 , 检测距离减少。
2 、传感器 属于 红外线反射探测 , 因此目标的反射率和形状是探测距离的关键 。
其中黑色探测距离最小 , 白色最大 ; 小面积物体距离小 , 大面积距离大。
3 、 传感器模块输出端口OUT可直接与单片机IO口连接即可, 也可以直接驱动一个5V继电器模块或者蜂鸣器模块;连接方式: VCC-VCC;GND-GND;OUT-IO4 、比较器 采用LM3 39 ,工作稳定;5 、可采用3 .3V -5V直流电源对模块进行供电。
当电源接通时,绿色电源指示灯点亮;6 、具有3mm的螺丝孔,便于固定、安装;7 、尺寸大小:中控板42mm × 38mm×12mm (长 ×宽×高)小板25mm ×12mm×12mm(长×宽 ×高)8 、 每个模块在发货已经将阈值比较电压通过电位器调节好,买家也可以根据实际情况进行调节(提示:模块反射距离越大,越容易误触发)三模块接口说明( 16线制)红外探头VCCGNDOUT对应接入中控板VCCGNDINx中控板供电 : 模块6p排针接口处V CC外接3.3V-5V电压 (可以直接与5v单片机和3.3v单片机相连 ) ; GND外接GND;OUT1-OUT4接单片机IO口四模块测试说明测试探头:移开探头前面所有物体,且探头不要指向有阳光的地方(光线对探头有较大干扰) ,将探头板接上电源后用万用表测量OUT和GND之间的电压,正常范围应该在0.6v-2.5v之间,用白纸挡在探头前,用万用表测量OUT和GND 之间的电压,正常范围应该接近0V.简单的说,就是用白纸挡住探头后,OUT和GND之间的电压会有一个明显的降低,这样就算正常。
怎么实现循迹方案简介循迹技术是指让机器人或车辆能够根据特定的线路进行移动或导航的技术。
循迹方案是机器人或车辆能够实现自动驾驶、路径规划和避障等功能的关键。
本文将介绍如何实现一个基于循迹的方案。
1. 传感器选择实现循迹方案的第一步是选择适合的传感器。
常用的传感器包括红外线传感器、光电传感器和摄像头等。
下面分别介绍这些传感器的特点和适用场景。
1.1 红外线传感器红外线传感器是一种经济实用的循迹传感器。
它可以通过测量地面上反射的红外线信号来检测机器人或车辆的位置。
它的工作原理是利用红外线发射器发射红外线,然后由红外线传感器接收并检测反射回来的红外线信号。
红外线传感器适用于室内或室外的光线较暗的环境。
1.2 光电传感器光电传感器是一种常用的循迹传感器。
它可以通过测量地面上的光线强度来检测机器人或车辆的位置。
光电传感器适用于室内或室外的光线较亮的环境。
与红外线传感器相比,光电传感器的精度更高,但成本较高。
1.3 摄像头摄像头是一种高级的循迹传感器。
它可以通过拍摄地面图像并进行图像处理来检测机器人或车辆的位置。
摄像头适用于复杂的环境和要求较高精度的应用场景。
但是,由于摄像头需要大量的计算资源,因此在资源受限的设备上使用时需要考虑计算性能。
2. 循迹算法选择合适的传感器后,下一步是实现循迹算法。
循迹算法的目标是根据传感器获取的数据确定机器人或车辆应该沿着的路径。
2.1 简单阈值算法简单阈值算法是一种基本的循迹算法。
它通过设定一个阈值来判断传感器数据是否超过或低于该阈值,从而确定机器人或车辆应该沿着哪个方向移动。
例如,可以通过红外线传感器检测到的红外线信号强度来判断机器人应该往左转、往右转还是直行。
2.2 PID控制算法PID控制算法是一种常用的循迹算法。
它通过比较期望的路径和当前位置的偏差来调整机器人或车辆的控制信号,从而实现精确的循迹。
PID控制算法由比例控制、积分控制和微分控制三部分组成。
通过调节这三部分的权重和参数,可以获得较好的循迹效果。

引言:智能小车红外循迹技术是一种基于红外传感器的自动导航技术,它可以使小车能够根据外界环境发出的红外信号进行导航,实现自动巡航。
本文将从红外循迹技术的原理、应用场景、具体实现方法、优缺点以及未来发展等方面详细讨论。
概述:红外循迹技术是智能小车领域中的重要技术之一,通过红外传感器感知地面上的红外信号,从而确定小车的行驶路径。
该技术常用于自动导航和避障等场景中,具有较高的可靠性和稳定性。
下面将详细探讨智能小车红外循迹技术的相关内容。
正文内容:一、红外循迹技术的原理1.红外传感器的工作原理2.红外信号与地面的交互3.红外循迹算法的实现二、红外循迹技术的应用场景1.工业自动化领域中的应用2.家庭服务中的应用3.自动驾驶车辆中的应用三、智能小车红外循迹技术的具体实现方法1.硬件方案1.1红外传感器选择与安装1.2控制模块设计与搭建1.3电源管理与供电设计2.软件方案2.1红外信号的数据处理2.2循迹算法的设计与实现2.3控制系统的编程与调试四、智能小车红外循迹技术的优缺点1.优点1.1精确度高1.2反应速度快1.3成本较低2.缺点2.1受环境因素影响较大2.2对于不同地面的适应性较差2.3容易受到干扰五、智能小车红外循迹技术的未来发展1.红外循迹技术在自动驾驶领域的应用前景2.其他导航技术与红外循迹技术的结合3.红外传感器的性能改进与创新总结:智能小车红外循迹技术是一种基于红外传感器的自动导航技术,其原理是通过感知地面上的红外信号来确定小车的行驶路径。
红外循迹技术广泛应用于工业自动化、家庭服务和自动驾驶车辆等领域。
该技术具有精度高、反应速度快以及成本低的优点,但也存在受环境因素影响较大、对不同地面适应性差以及易受干扰等缺点。
未来,红外循迹技术在自动驾驶领域的应用前景广阔,并且可以通过与其他导航技术的结合以及红外传感器的性能改进与创新来进一步提升其应用效果和可靠性。
循迹小车设计概述总结报告一. 引言循迹小车是指通过光电传感器感知地面上的黑线,并根据黑线的位置来调整车身方向,从而实现沿着黑线自动行驶的一种智能小车。
本篇报告旨在总结循迹小车设计的整体思路、实施过程以及遇到的问题与解决方案。
二. 设计思路循迹小车的设计主要包含以下几个关键要点:1. 感应模块选择选择合适的光电传感器作为感应模块,用于检测地面上的黑线。
常见的光电传感器有红外线传感器、RGB传感器等,可以根据实际需求选择适合的传感器。
2. 控制模块选择选择合适的控制模块,负责接收感应模块的数据,并控制小车的电机进行相应的运动。
常见的控制模块有单片机、树莓派等,可以根据需求和个人技术储备来选择。
3. 算法设计设计循迹算法,根据光电传感器的反馈数据,判断车身当前位置与黑线的位置关系,并根据判断结果来调整小车的行驶方向。
常见的算法有PID控制算法、模糊控制算法等,可以根据实际需求选择适合的算法。
4. 机械结构设计设计小车的机械结构,包括底盘、电机、车轮等。
确保机械结构的稳定性和可靠性,同时要考虑小车的大小、重量和外观等因素。
三. 实施过程在设计循迹小车的过程中,我们按照以下步骤逐步实施:1. 硬件搭建首先,搭建循迹小车的硬件系统,包括连接光电传感器、控制模块和电机等。
确保各个模块之间的连接正确无误,以及硬件系统的稳定性和可靠性。
2. 程序编写根据设计思路和需求,编写程序实现循迹小车的控制逻辑。
涉及到光电传感器数据的读取、算法的实现和电机控制等方面的内容。
在编写过程中,需要进行调试和测试,确保程序的准确性和稳定性。
3. 测试和优化在完成程序编写后,对循迹小车进行测试和优化。
通过实际测试,了解小车在各种情况下的表现,并根据实际情况对程序进行优化和调整,以提高小车的稳定性和自动化程度。
四. 遇到问题与解决方案在循迹小车设计的过程中,我们遇到了一些问题,但通过不断努力和寻找解决方案,最终都得到了解决。
以下是我们遇到的一些问题及解决方案的总结:1. 光照干扰在室外测试时,光照强度的变化会对光电传感器的检测结果产生影响。
循迹小车方案设计一、引言在计算机视觉和机器人技术领域,循迹小车是一个常见的项目。
循迹小车可以通过使用光电传感器或摄像头等传感器来感知黑色或白色的轨迹,并根据轨迹的方向进行自动导航。
本文将介绍一个循迹小车的方案设计,包括硬件和软件的部分。
二、硬件设计1. 选择电机和轮子循迹小车需要一个电机驱动系统来控制它的运动。
我们可以选择直流电机和合适的轮子来实现小车的移动。
电机的选择应该根据小车的负载和速度要求来做出决策。
2. 选择传感器循迹小车需要传感器来感知轨迹上的黑色或白色区域。
常用的传感器是光电传感器和摄像头。
光电传感器通过发射红外线并接收反射的红外线来感知颜色,摄像头则可以通过图像处理算法来感知颜色。
3. 选择控制器循迹小车需要一个控制器来控制电机和传感器之间的通信。
可以选择单片机、嵌入式开发板或者微控制器来实现控制器功能。
4. 连接电路在硬件设计中,需要将电机、传感器和控制器相互连接。
根据选择的电机和传感器,可以设计相应的电路板来实现连接功能。
三、软件设计1. 数据采集在软件设计中,需要编写代码来采集传感器的数据。
对于光电传感器,可以通过数模转换将模拟信号转换为数字信号;对于摄像头,可以使用图像处理算法来提取轨迹的信息。
2. 数据处理采集到的数据需要进行处理,以确定小车需要前进、后退、左转还是右转。
可以编写算法来对数据进行分析,并根据分析结果给出相应的控制信号。
3. 运动控制根据数据处理的结果,需要编写代码来控制电机的转动。
对于直流电机,可以通过调整电机的电压或占空比来控制转动方向和速度。
四、系统测试和优化完成软件设计后,需要对整个系统进行测试。
可以将循迹小车放置在黑白轨迹上,观察它是否能正确地跟随轨迹运动。
如果有异常,需要对系统进行调试和优化,直到达到预期的效果。
五、总结循迹小车方案设计涉及到硬件和软件两个方面。
正确选择电机、传感器和控制器,并进行合理的连接和编程,是实现循迹小车功能的关键。
通过系统测试和优化,可以不断提高循迹小车的性能和稳定性。
循迹传感器范围默认单位
循迹传感器是一种常用于机器人、自动驾驶汽车等智能设备中的工具,能够检测并跟踪物体的位置、形状等信息。
在使用循迹传感器时,需要设置其范围默认单位,以确保传感器能够正常工作。
循迹传感器的范围默认单位通常是厘米或者毫米。
这个设置决定了循迹传感器的探测范围,即在什么情况下会检测到物体。
例如,如果设置范围为 10 厘米,那么当机器人或者汽车靠近物体 10 厘米时,循迹传感器就会检测到物体。
这个设置对于机器人或者汽车的正常操作非常重要,能够避免机器人或者汽车与物体发生碰撞。
循迹传感器的范围默认单位还可以用于机器人或者汽车的自适
应控制。
例如,如果机器人或者汽车设置了 10 厘米的范围默认单位,那么当机器人或者汽车靠近物体 10 厘米时,它就会判断物体为障碍物,并采取相应的措施,如减速、停车等。
这样可以确保机器人或者汽车能够正常操作,并避免与物体发生碰撞。
总结起来,循迹传感器的范围默认单位对于机器人或者汽车的正常操作非常重要。
正确设置循迹传感器的范围默认单位,可以让机器人或者汽车更加智能、高效地执行任务。
智能小车循迹设计方案智能小车循迹设计方案智能小车循迹是指通过对循迹线路的感知和判断,自动调整车辆行驶的轨迹,实现自动化导航的功能。
下面是一个智能小车循迹设计方案的简要介绍。
硬件设计方案:1. 传感器选择:将红外传感器作为循迹小车的传感器,红外传感器具有较高的探测精度和稳定性,在光线变化时也能稳定工作。
2. 微控制器选择:选择一款性能出色、功能强大的微控制器,如Arduino、Raspberry Pi等,作为智能小车的控制中心,负责循迹算法的实现和控制指令的下发。
3. 电机控制:选用直流电机作为小车的驱动源,通过PWM方式控制电机的转速和方向,使小车能够实现前进、后退和转弯等动作。
4. 电源选择:选择适宜的电源供电,保证小车能够长时间稳定工作,同时考虑到重量和体积的限制。
软件设计方案:1. 循迹算法:编写适用于红外传感器的循迹算法,通过传感器感知循迹线路的变化,根据相应的判断逻辑,控制车轮的转动方向,使小车保持在循迹线上行驶。
2. 硬件控制:驱动电机实现小车的移动,通过控制电机的转速和方向,使小车顺利前进、后退和转弯。
3. 用户交互:通过编写用户交互界面,实现对小车循迹功能的设置和控制,方便用户进行配置和操作。
4. 循迹环境优化:通过对循迹环境进行优化,如对循迹线进行加密处理、使用特殊材料制作循迹线等,提高循迹的准确性和稳定性。
5. 故障处理:对于传感器故障、电机故障等情况,做好相应的异常处理,提高小车的稳定性和可靠性。
总结:智能小车循迹设计方案包括硬件部分和软件部分,硬件部分主要包括传感器、微控制器、电机控制和电源选择等;软件部分主要包括循迹算法、硬件控制、用户交互、循迹环境优化和故障处理等。
通过精心设计和实施,可以实现小车循迹的自动导航功能。
自动寻迹小车的传感器模块设计王 晶,翁显耀,梁业宗(武汉理工大学自动化学院 湖北武汉 430070)摘 要:介绍利用反射式红外光电传感器实现小车自动寻迹导航的设计与实现以及小车的一种寻迹算法。
自动寻迹是智能小车(Smart Car )机器人系统的重要组成部分,其用实现小车自动识别路径。
在实验中采用与白色地面色相差很大的黑色线条引导小车按照既定路线前进,系统控制核心采用飞思卡尔的MC9S12D G128B 单片机,系统驱动采用控制方式为PWM 的直流电机。
实验证明此方案可行并且可靠。
该技术可以应用于无人驾驶机动车、无人生产线、仓库、服务机器人等领域。
关键词:自动寻迹;红外传感器;PWM 方式;数据处理中图分类号:TP212 文献标识码:B 文章编号:10042373X (2008)222192203Design of the Sensor Module in Automatic T rack Finding Model C arWAN G Jing ,WEN G Xianyao ,L IAN G Yezong(College of Automation ,Wuhan University of Technology ,Wuhan ,430070,China )Abstract :This article introduces the design and execution of automatic track finding navigation car realized by reflective in 2frared photoeletric sensor and its algorithm.The automatic trak fiding is an important f unction of smart 2car robot system ,to realize car automatic identification path.In the experiment ,taking use of the black guiding wire whose color distinguishes f rom the white background to guide the car to move along the given line automatically.The MC9S12D G 128B from f reescale single chip microcomputer is used for the control core in this system ,and the PWM direct current electromotor for the motive force or power system.The experiment proves that this project is feasible and credible.This technology could serve to driverless mo 2bile ,unmanned producing lines ,warehouse ,service robot and etc.K eywords :automatic track finding ;inf rared sensor ;PWM ;data processing收稿日期:20082032181 引 言随着科学技术的发展,机器人的应用已经遍及机械、电子、冶金、交通、宇航、国防等领域。
电赛小车循迹方法我折腾了好久电赛小车循迹这事儿,总算找到点门道。
说实话,一开始我真是瞎摸索。
最开始我就觉得这循迹嘛,不就是让小车沿着线走嘛,能有多难。
我就想着用那种最简单的光电传感器来做。
我把光电传感器放在小车前面,然后就开始测试。
结果呢,各种失败。
有时候小车根本就不跟着线走,直接跑偏。
我才发现这个传感器的安装位置和角度其实特别重要。
就好比人的眼睛要看路得长在合适的地方对吧。
我调整了半天角度,让它刚好能稳稳地‘看’到黑线,这才稍微好了点。
后来我又尝试了摄像头循迹的方法。
我想摄像头拍下来整个路线,然后让小车根据图像分析来走。
这可难倒我了。
摄像头采集图像倒是不难,可怎么从这个图像里准确地识别出黑线呢。
我又一头扎进算法里。
试着用各种阈值分割的方法,但好多时候都不准确。
就像在一个混乱的人群里找一个穿黑衣服的人,很容易认错。
后来我就去研究那些成功的案例。
看到人家对采集到的图像做了很多预处理,像是灰度处理,降噪这些。
这就相当于把混乱的人群先整理下,那些奇怪的光线干扰啊,就像是人群里的捣乱分子都被赶走了,这样就能更清楚地看到穿黑衣服的人了。
我按照人家的经验,做了这些操作,一下子识别率就提高了不少。
还有一个很关键的问题,就是小车的转向控制。
这个也是我犯过错误的地方。
最初我简单地设置了一个只要偏离黑线就转向的逻辑,但是转向力度太大了,小车就像喝醉了的人一样,摇摇晃晃的。
我后来才明白要根据偏离的程度来调整转向的幅度。
比如说稍微偏一点,就缓慢调整方向,就像开车的时候微调方向盘一样。
如果偏得很多,再加大调整的幅度。
哦对,用光电传感器的时候,光线也很重要。
如果光线太强或者太弱,这个光电传感器就不好使了。
在室外强光下,我就碰到过传感器失灵的情况。
所以如果比赛在不稳定的光照环境下,还得考虑加个遮光罩这些东西。
再讲下路径记忆这个事儿吧。
有时候小车初次循迹的时候可以把路径记下来,这样万一中间出了点问题,像是被障碍物挡了一下偏离了路线,还能根据记忆回到正轨。