中低速磁悬浮
- 格式:ppt
- 大小:1.05 MB
- 文档页数:19
中低速磁悬浮列车悬浮与牵引工作原理摘要:概述了中低速磁浮列车的技术特点,着重介绍了我国中低速磁浮列车悬挂牵引系统的工作原理。
与传统的轮式车辆相比,磁悬浮车辆的悬挂特性有助于克服车轮粘滞和运转噪音问题,有效延长磁悬浮车辆的使用寿命,减少日常保养和维修。
磁悬浮列车可以成为未来理想的地面交通工具。
关键词:中低速磁悬浮列车;悬浮系统;牵引系统前言中低速磁浮列车是城市轻轨运输系统,最高时速约100 ~ 150公里,具有效率、高性能、大容量、低噪音、低污染、低能耗等诸多特点,发展前景广阔。
适用于低流量和中等流量中心的低流量快速扩展线路,例如连接机场、城市郊区、工业区、主要娱乐场所的专用快速扩展线路,以及建筑密度高的大中型城市的灵活下行线路作为高技术轨道交通项目的前期工作,低速轨道交通需要严格的安全、可靠性和冗馀性要求,这要求列车维修管理具有科学规划、状态监测、过程控制、历史可追溯性和共享性。
1中低速磁悬浮列车悬浮原理磁悬浮列车的悬挂力基本上是由电子产生的电磁重力产生的排斥力,用于磁悬浮列车的悬挂和定向,然后可以分别安装一次和两次直线电机,用于列车的驱动。
目前,中低速磁浮列车的内侧轨道主要采用f型轨道,f型轨道的下行部分相当于轨道末端的振荡器,在轨道上产生相应的电磁重力目前,中国的中低速列车没有配备专用导电仪。
列车转弯时,f轨道电极与悬挂式电磁铁位置不正确,形成横向转向力,电磁铁转向力与列车上的强制转向机构协调,实现悬挂式支承的曲线调整。
列车悬架系统依靠间隙传感器采集控制数据并将其传递给悬架控制器。
悬架调节器运行后,向着色器发出指令,调节输出到电极的电流-磁铁,实时动态调整悬架间隙,使其保持在允许的波动范围内。
间隙传感器通常固定在电极上-磁铁,用于测量极板顶部表面与轨道底部表面之间的间隙,形状为“f”,并测量车辆的垂直加速度。
分离传感器的探测表面应尽可能平行于轨道表面。
间隔传感器具有超收功能,单个间隔传感器可以产生多个间隔和加速度信号,每个信号通过各自的串行通信接口传递给悬挂控制器。
中低速磁悬浮双线简支轨道梁的冲击效应研究中低速磁浮交通因其转弯半径小、爬坡能力大、运营噪声低、环境污染小且适应地形强等优点,特别适合城市中短距离的运输,在未来城市交通中具有良好的前景[1]。
中低速磁浮列车通过主动调节带有控制的电磁力使列车悬浮在额定间隙附近,从而实现车辆的平稳运行,而该悬浮力的大小与悬浮间隙密切相关,因此磁浮车辆对轨道的不平顺性要求较高[2]。
磁浮列车在预应力混凝土简支轨道梁上运行时,轨道梁产生的变形会改变磁浮间隙,进而改变轨道的平顺性,需要不断改变电磁力的大小来保持运行平稳性,因此该过程与轮轨交通一样,涉及车辆与轨道梁的动力相互作用问题[3-8]。
相比传统轮轨交通的桥梁,磁浮轨道梁刚度小、质量轻,因此在磁浮车辆动载作用下的冲击效应对轨道梁系统的平稳性尤为重要,这也是磁浮车辆-轨道梁动力相互作用问题研究的重要内容之一。
目前国内对中低速磁浮研究中,主要侧重于磁浮车辆系统的动力学性能和悬浮控制系统[3-5],而对于磁浮轨道梁的动力响应的相关研究较少,李小珍等[3]研究了中低速磁浮列车-桥梁系统竖向耦合振动,但并未分析F轨对轨道梁动力系数影响。
耿杰等[6]以长沙中低速磁浮快线简支梁为例,实测并分析了磁浮车辆通过轨道梁时的耦合振动特性,通过实测拟合得到了动力系数关于速度的函数关系式,并未讨论与轨枕间距、扣件刚度的变化关系。
刘德军等[9]构建了磁浮车辆-控制器-桥梁系统耦合动力模型,讨论和分析了典型车速、车辆荷载下桥梁、车辆和悬浮系统的动力响应,并未对冲击系数问题进行讨论分析。
杨平等[10]研究了中低速磁悬浮车辆作用下车速、车重及桥梁阻尼比对20 m简支轨道梁冲击系数的影响规律,并未讨论不同轨枕间距及扣件刚度的影响。
目前各国规范对动力系数的规定也不统一,在实际桥梁设计时,一般通过动力系数的经验公式,近似考虑车辆荷载的动力效应,但动力系数不仅与桥梁结构基频有关,还与行车速度、车重、扣件刚度及轨枕间距等因素有关。
中低速磁浮交通轨排通用技术条件中低速磁浮交通轨排是一种新兴的交通技术,它具有高速铁路和传统地铁的优点,成为城市交通发展的新选择。
下面将介绍中低速磁浮交通轨排的通用技术条件。
中低速磁浮交通轨排的速度一般控制在200公里/小时以下,这样可以确保乘客的安全和舒适。
同时,磁浮列车的加速度和减速度也需要适中,避免对乘客产生不适感。
中低速磁浮交通轨排的线路设计要充分考虑城市的地形和道路状况。
线路应该尽量避免大规模的地质工程,减少对城市环境的影响。
同时,线路的走向要经过合理的规划和设计,尽量减少弯曲和坡度,确保列车的平稳运行。
中低速磁浮交通轨排的车辆设计也是关键之一。
车辆的空间布局要合理,能够满足乘客的需求。
此外,车辆的外观设计要美观大方,体现现代科技感。
车辆的制动系统、动力系统和安全系统等也需要精心设计和优化,确保列车的安全运行。
对于中低速磁浮交通轨排的轨道系统,需要确保轨道的平整度和水平度。
轨道的安装要牢固可靠,能够承受列车的重量和运行时的动力。
此外,轨道的维护和保养也是必不可少的,以确保列车的安全运行和乘客的舒适体验。
中低速磁浮交通轨排的供电系统也需要满足一定的技术要求。
供电系统需要稳定可靠,能够为列车提供足够的电力。
同时,供电系统的能效也需要考虑,以减少能源的消耗和环境的影响。
中低速磁浮交通轨排的车站设计也是重要的一环。
车站的布局要合理,能够方便乘客进出。
车站的设施要完善,包括候车大厅、售票厅、安检通道等。
此外,车站的换乘和接驳也需要考虑,以便乘客能够方便地换乘其他交通工具。
中低速磁浮交通轨排的通用技术条件涵盖了车辆、线路、轨道、供电系统和车站等多个方面。
只有满足这些条件,中低速磁浮交通轨排才能够安全、高效地运行,为城市的交通发展做出贡献。
希望随着科技的不断进步,中低速磁浮交通轨排能够在更多城市得到应用,为人们的出行提供更加便捷、舒适的选择。

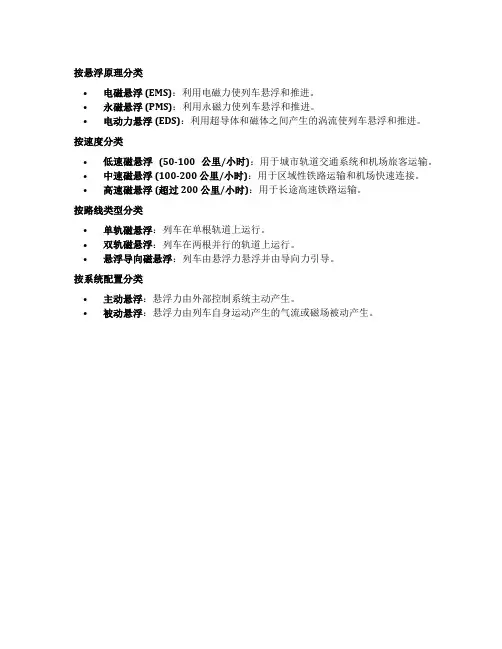
按悬浮原理分类
•电磁悬浮 (EMS):利用电磁力使列车悬浮和推进。
•永磁悬浮 (PMS):利用永磁力使列车悬浮和推进。
•电动力悬浮 (EDS):利用超导体和磁体之间产生的涡流使列车悬浮和推进。
按速度分类
•低速磁悬浮(50-100 公里/小时):用于城市轨道交通系统和机场旅客运输。
•中速磁悬浮 (100-200 公里/小时):用于区域性铁路运输和机场快速连接。
•高速磁悬浮 (超过 200 公里/小时):用于长途高速铁路运输。
按路线类型分类
•单轨磁悬浮:列车在单根轨道上运行。
•双轨磁悬浮:列车在两根并行的轨道上运行。
•悬浮导向磁悬浮:列车由悬浮力悬浮并由导向力引导。
按系统配置分类
•主动悬浮:悬浮力由外部控制系统主动产生。
•被动悬浮:悬浮力由列车自身运动产生的气流或磁场被动产生。
中低速磁浮车辆通用技术条件中低速磁浮技术是指磁浮车辆在低于每小时500公里的速度下运行。
而“中低速磁浮车辆通用技术条件”简称“中低速磁浮技术条件”,是制定中低速磁浮车辆技术规范的重要文献。
一、技术概述中低速磁浮车辆通用技术条件包含了磁浮车辆的车体、底盘、电机、电控等核心技术。
它主要针对中低速磁浮车辆的定义、结构与参数、系统性能等方面进行规范,以保证车辆的安全性、运行性、结构性等各方面的优良表现,提高市场竞争力。
二、技术细节1.基本定义:中低速磁浮车辆是指磁悬浮式,整车靠永磁同步电机及其电器控制和驱动运动,以磁吸浮力保持离地高度及稳定运行,载运旅客或物品,行驶速度小于500km/h的城市轨道交通工具。
2.技术参数:车体长度、宽度、高度;净重、总重;底盘参数:轴向载荷、轮径、轴距、制动方式等;电机参数:功率、转速、变速比等;电控参数:控制系统满足的技术要求等。
3.系统性能:中低速磁浮车辆的性能要求也在技术条件中有所规定,如:牵引力、最大车速、加速度、制动距离、最大横向加速度、外部噪声等。
4.车体结构:中低速磁浮车辆通用技术条件还对车体结构提出了要求。
车体结构应具有一定的可靠性和刚度,以保证行驶安全,同时还要满足美观、舒适、节能、环保等要求。
三、技术进展中低速磁浮车辆通用技术条件的制定,充分推动了我国中低速磁浮车辆技术的发展与应用。
随着中国技术的不断创新,中低速磁浮技术也逐渐向智能化、节能化、环保化等方向发展,如光纤光栅测温、新型集电装置等技术应用的推广,使得中低速磁浮车辆在城市交通领域具有了更加广阔的应用前景。
四、结语随着大众生活水平的提高,城市交通问题也越来越凸显。
而中低速磁浮技术以其独特的环境友好、高效舒适、低碳节能的特点,正在成为解决城市交通矛盾的重要解决手段。
因此,加强对中低速磁浮技术的研究与实践,是未来的必然趋势。

中低速磁悬浮在城市轨道交通中的运用磁悬浮技术的研究源于德国,1922年德国工程师赫尔曼·肯佩尔提出了电磁悬浮原理,1934年他申请了磁悬浮列车的专利,1953年完成科学报告《电子悬浮导向的电力驱动铁路机车车辆》。
20世纪70年代以后,世界工业化国家经济实力不断加强,为提高交通运输能力以适应经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始对磁悬浮运输系统进行开发,并取得令人瞩目的进展。
磁悬浮列车与传统轮轨列车不同,它用电磁力将列车浮起,导向和驱动。
在运行时不与轨道发生摩擦,中低速磁悬浮列车(时速小于200km)在运行时发出的噪声非常低。
此外,磁悬浮列车还具有速度高,制动快,爬坡能力强,转弯半径小,振动小,舒适性好等优点。
在修建城市轨道交通线路的造价攀升的情况下,中低速磁悬浮线的性能价格比好的优势得以显示出来。
1 磁悬浮技术的种类目前,载人试验获得成功的磁浮列车系统有3种,它们的磁悬原理和系统技术完全不同,不能兼容。
(1)用常导磁吸式(EMS)进行悬浮导向,同步长定子直线电机驱动的高速磁浮列车系统。
以德国的TR(Trans rapid)磁浮列车系统为代表。
TR采用常规电导吸引的方式进行悬浮和导向,悬浮的气隙较小,一般为 10mm 左右;由地面一次控制的直线同步电机驱动。
我国上海机场磁悬浮线就是引进的德国 TR系统(2)采用超导磁斥式(EDS)进行悬浮和导向,同步长定子直线电机驱动的高速磁浮列车系统。
高速超导磁悬浮列车以日本的ML系统为代表。
车上的超导线圈在低温下进入超导状态,通电后产生很强的磁场,列车运动时,超导磁体使线路上的导体产生感应电流,该电流也将产生磁场,并与车上的超导磁体形成斥力,使车辆悬浮(悬浮高度较大,一般为100mm左右)。
列车由地面一次控制的线性同步电机进行驱动,同步电机定子三相绕组铺设在地面线路两侧,无需通过弓网受电方式供电。
(3)采用常导磁吸式(EMS)进行悬浮和导向,异步短定子直线电机驱动的中低速磁浮列车系统。
中低速磁悬浮TWC环线动态建模与仿真研究吴 进,孟天旭,党海笑,白英杰(北京全路通信信号研究设计院集团有限公司,北京 100070)摘要:中低速磁悬浮列车通过车地通信(Train-to-Wayside Communication, TWC)环线基于电磁感应原理实现车地信息交互,TWC 环线是保证列车运行安全与可靠的重要设备。
在复杂电磁环境下,信息传输的稳定与否十分关键。
利用三维电磁仿真软件对TWC 环线进行动态建模及验证分析,研究仿真系统的传输性能,结合现场测试数据对本模型进行验证,为现场系统设备的维护和系统研发设计提供坚实理论基础。
关键词:磁悬浮;环线;电磁干扰;仿真中图分类号:U237 文献标志码:A 文章编号:1673-4440(2022)12-0064-05Research on Dynamic Modeling and Simulation ofMedium and Low Speed Magnetic Levitation TWC LoopWu Jin, Meng Tianxu, Dang Haixiao, Bai Yingjie(CRSC Research & Design Institute Group Co., Ltd., Beijing 100070, China)Abstract: The medium and low-speed maglev trains realize train-to-wayside information interaction through the TWC (Train-to-Wayside Communication) loop line based on the principle of electromagnetic induction. The TWC loop line is important equipment to ensure the safety and reliability of train operation. In a complex electromagnetic environment, the stability of information transmission is critical. This paper uses three-dimensional electromagnetic simulation software to conduct dynamic modeling and verification analysis of the TWC loop, studies the transmission performance of the simulation system, and verifies the model with field test data, providing a solid theoretical foundation for the maintenance of field system equipment and system R&D and design.Keywords: maglev; loop line; electromagnetic interference; simulationDOI: 10.3969/j.issn.1673-4440.2022.12.013收稿日期:2021-08-24;修回日期:2022-11-07基金项目:北京全路通信信号研究设计院集团有限公司科研项目(2300-K1120003.01)作者简介:吴进(1990—),男,工程师,硕士,主要研究方向:交通信息工程及控制,邮箱:***************.cn 。
磁悬浮技术技术介绍一、什么是中低速磁浮交通?以往的轮轨交通,顾名思义就是轮在轨上跑的交通系统,对人类社会发展作出了历史性的巨大贡献,但由于轮与轨的接触运动,振动和噪声相伴而生,因此在繁华的城镇中心地带和居民生活区,轮轨系统不能铺设在地面之上,环保方面要求只能建在地下。
而中低速磁浮交通与轮轨交通最大的区别就在于没有车轮,用电磁力悬浮支撑代替了车轮支撑,这就避免了轮轨接触带来的一系列问题,而又不产生新的问题。
所以,中低速磁浮交通在交通领域成为一项创新性的开拓,是人类发展历史上,继蒸汽机车发明后交通领域的又一次技术革命,它将会给人类的生活带来不可估量的潜在价值。
从2006年开始,市地铁集团就获得了市政府部门的批准,首创性地对城市轨道交通采用中低速磁浮技术的可行性进行前期研究。
时至今日,深圳在中低速磁浮技术的研究已经历了近7年的时间,在国内相关领域中属数一数二的前沿城市。
二、磁浮技术的发展历程德国是世界上最早研究磁浮的国家。
早在20世纪20年代,德国科学家工程师赫尔曼·肯培尔首次考虑电磁浮铁路(电磁对车道的吸引原则),并于1934年申请了悬浮列车的专利,被誉为“磁浮之父”。
进入上世纪70年代以后,随着电力电子和控制技术的发展,德国、日本、美国、加拿大、法国、英国等发达国家相继开始筹划磁浮运输系统的开发。
但后来都中途放弃,只有德国和日本仍继续进行,但各有侧重。
德国侧重高速磁浮铁路系统的研究,日本则侧重中低速磁浮铁路系统的研究。
世界上第一条磁浮商业线路——全长30公里、从龙阳路到浦东机场的“上海磁浮示范运营线”,其引进的正是德国人研发的高速磁浮铁路系统。
目前日本已于2005年3月成功投入运营,韩国也将于今年投入运营。
中国从20世纪80年代开始了常导磁浮列车的研究。
作为高端的轨道交通技术,国家将磁浮列车关键技术研究列入“八五”攻关计划,并在“十一五”、“十二五”中将磁浮交通系统作为国家科技支撑计划之一。
中低速磁浮交通轨排通用技术条件1. 什么是中低速磁浮交通中低速磁浮交通是一种以磁悬浮为主要运行方式,运行速度在每小时100公里以下的城市轨道交通。
它是一种新型城市快速交通工具,目前在国内外已经有多个城市投入使用。
2. 中低速磁浮交通的优势中低速磁浮交通相比于传统的铁轨交通有许多优势:(1)速度快:中低速磁浮交通的最高运行速度可达每小时100公里,大大缩短了城市间的行驶时间。
(2)安静:由于磁悬浮技术,中低速磁浮交通不会像传统铁轨交通一样发生摩擦,所以噪音相对较小。
(3)环保:中低速磁浮交通没有尾气排放,可以利用可再生能源作为能源,相对较为环保。
(4)稳定:由于磁悬浮技术的使用,中低速磁浮交通不受地形、地势等条件的限制,可以在复杂的环境中运行。
3. 中低速磁浮交通的技术条件与传统的铁轨交通相比,中低速磁浮交通需要具备独特的技术条件:(1)磁浮技术:中低速磁浮交通主要运用磁悬浮技术,通过磁悬浮系统让列车“漂浮”在轨道上,并进行运动。
(2)供电系统:中低速磁浮交通需要通过供电系统对列车进行供电,以维持车辆的运行。
(3)控制系统:中低速磁浮交通需要一套完整的控制系统来负责车辆的行驶和各种系统的协调。
(4)车辆设计:中低速磁浮交通需要经过严格的设计和测试,以保证车辆的安全和可靠性。
4. 中低速磁浮交通轨排通用技术条件中低速磁浮交通的轨排通用技术条件主要包括以下几个方面:(1)轨道设计:中低速磁浮交通轨道是由长条形的钢轨组成的,在设计时要考虑适当的弯曲半径、坡度以及运行速度等因素,保证列车的安全和舒适性。
(2)地基工程:中低速磁浮交通需要一定规模的地基工程,以确保轨道的稳定和坚固,同时还需要考虑地质环境和结构的合理设计。
(3)供电系统:中低速磁浮交通的供电系统需要高效可靠,能够正常运作并满足磁悬浮列车的供电需求。
(4)控制系统:中低速磁浮交通的控制系统需要能够协调车辆的行驶和传感器的运作,保证系统稳定运行。