飞思卡尔智能车竞赛光电平衡组技术报告
- 格式:doc
- 大小:1.36 MB
- 文档页数:43
第八届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告目录摘要 (II)第一章引言 (1)第二章控制系统总体设计方案 (3)2.1 系统硬件结构 (3)2.2 系统软件设计 (3)2.3 车模整体布局 (5)第三章车模整体设计 (7)3.1车模具体参数 (7)3.2系统电路板安装 (7)3.3 传感器安装 (8)3.4 测速模块安装 (10)3.5人机界面调参模板安装 (12)第四章系统设计软件 (13)4.1核心控制模块 (13)4.2主板模块主板电路图 (14)4.3 各电源块的说明: (15)4.4电机驱动模块 (21)4.5测速模块 (23)4.6线阵CCD跑道传感器模块 (23)第五章软件设计 (27)5.1 车模角度和角速度计算 (27)5.2滤波控制算法 (29)5.3车模直立控制 (30)5.4车模速度控制 (31)5.5车模方向控制 (32)第六章车模调试 (33)6.1 车模电路初步调试 (33)6.2现场动态参数调试 (34)6.3开发工具 (35)参考文献 (38)附件1:智能车技术参数 (III)附件2:整体原理图 (IV)附件3:程序源代码 (V)摘要本文为第八届飞思卡尔智能车光电组直立车模的设计说明。
本智能车采用大赛组委会统一提供的D型车模,以32位单片机K60 作为系统控制处理器,以IAR Embedded Workbench为开发平台。
整个智能车系统的设计与实现包括车模的机械结构调整、传感器电路的设计及位置安装、控制算法和策略优化、系统调试等多个方面。
通过对比不同方案的优缺点,并结仿真平台进行了大量底层和上层测试,最终确定了现有的系统结构和各项控制参数。
系统硬件上包括核心控制模块,电源模块,传感器模块,电机驱动模块,软件设计方案为在深入分析研究大赛组委会给出的直立参考方案后,在一定程度上大胆创新,形成自己独特的方案,从而提高了车模的行驶速度和稳定性。
在智能车调试过程中,使用上位机利用蓝牙技术对智能车的状态进行实时监视,有效提高了调试的效率。
第八届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告基于线性CCD的寻线智能车设计学校:东北师范大学队伍名称:东师天狮队参赛队员:黄永霖杨舟杨明达带队教师:岳丽娟贾艳关于技术报告和研究论文使用授权的说明本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车竞赛关于保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:黄永霖杨舟杨明达带队教师签名:岳丽娟贾艳日期:2013.8.12摘要本文主要介绍了智能汽车控制系统的软硬件设计及开发过程。
整个系统涉及车模机械结构调整、硬件电路设计、赛道检测、控制算法等多个方面。
车模以飞思卡尔公司Kinetis系列K10单片机为控制核心,以线性CCD作为传感器检测赛道,以PID算法作为核心控制算法。
正文分别从机械调整、电路设计和软件调试三个部分对智能汽车的整个制作过程进行了详细的介绍,其中包括了对设计方案选择、参数选取与调整、理论原理分析、技术的改进与创新等方面的内容。
经实际场地测试,本车模可以很好的适应大小“S”弯、“十字”交叉、虚线、坡道与障碍等不同的赛道类型以及不同类型赛道的不同组合,平均速度可达到1.9m/s,最大速度可达2.2m/s。
本车模主要特点在于对速度控制,对于多障碍,路况复杂跑道更有优势。
关键字freescale智能车线性CCD循迹PID控制路径选择目录第一章引言-----------------------------------------------------------------------------------------------------11.1背景介绍-------------------------------------------------------------------------------------------------11.2整车设计思路------------------------------------------------------------------------------------------11.3文章结构-------------------------------------------------------------------------------------------------2第二章机械结构设计-----------------------------------------------------------------------------------------32.1总体思路-------------------------------------------------------------------------------------------------42.2固定车模底盘与后轮支架---------------------------------------------------------------------------42.3陀螺仪和加速度传感器的安装--------------------------------------------------------------------52.4CCD的安装----------------------------------------------------------------------------------------------62.5硬件电路板的安装------------------------------------------------------------------------------------72.6测速传感器的安装------------------------------------------------------------------------------------7第三章硬件电路设计-----------------------------------------------------------------------------------------83.1硬件设计总体方案------------------------------------------------------------------------------------83.2电源管理模块------------------------------------------------------------------------------------------93.3主控制器电路-----------------------------------------------------------------------------------------103.4传感器电路--------------------------------------------------------------------------------------------103.4.1陀螺仪模块----------------------------------------------------------------------------------103.4.2加速度计模块-------------------------------------------------------------------------------113.4.3线性CCD模块-------------------------------------------------------------------------------113.5电机驱动电路-----------------------------------------------------------------------------------------133.6人机交互电路-----------------------------------------------------------------------------------------14第四章软件设计---------------------------------------------------------------------------------------------154.1总体设计-----------------------------------------------------------------------------------------------154.1.1层次设计--------------------------------------------------------------------------------------154.1.2总体流程--------------------------------------------------------------------------------------154.2位置确定-----------------------------------------------------------------------------------------------164.3电机控制-----------------------------------------------------------------------------------------------174.4直立控制-----------------------------------------------------------------------------------------------174.5速度控制-----------------------------------------------------------------------------------------------184.6转向控制-----------------------------------------------------------------------------------------------184.7特殊情况处理-----------------------------------------------------------------------------------------194.7.1十字弯-----------------------------------------------------------------------------------------194.7.2坡道--------------------------------------------------------------------------------------------194.7.3起跑线-----------------------------------------------------------------------------------------204.7.4障碍--------------------------------------------------------------------------------------------214.7.5虚线--------------------------------------------------------------------------------------------21第五章赛车调试---------------------------------------------------------------------------------------------225.1系统硬件调试-----------------------------------------------------------------------------------------225.2传感器调试--------------------------------------------------------------------------------------------225.3软件系统调试-----------------------------------------------------------------------------------------23第六章赛车具体参数---------------------------------------------------------------------------------------24第七章总结与展望------------------------------------------------------------------------------------------257.1总结-----------------------------------------------------------------------------------------------------257.2展望-----------------------------------------------------------------------------------------------------25参考文献--------------------------------------------------------------------------------------------------------27致谢-----------------------------------------------------------------------------------------------------------27附录:程序代码 (Ⅰ)论文 (VII)研究论文研究第一章引言1.1背景介绍全国大学生智能汽车竞赛是以智能汽车为竞赛平台的多学科专业交叉的创意性科技竞赛,是面向全国大学生的一种具有探索性的工程实践活动,该竞赛是在规定的模型汽车平台上,使用飞思卡尔半导体公司的8位、16位和32位微控制器作为核心控制模块,通过增加道路传感器、电机驱动电路以及编写相应软件,制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
飞思卡尔智能车光电组技术报告一、智能车光电组概述智能车光电组是指智能车中的关键性能元件——光电传感器集合体。
它能对车辆运动状态、线路、红绿灯等信息进行感知,实现智能驾驶的基础。
智能车光电组主要包括红外线传感器、光耦传感器、光电限位传感器等。
这些传感器通过感知周围环境中的光电信息,将其转化为电信号,再与控制电路进行通信,完成车辆的控制和判断。
二、红外线传感器红外线传感器是智能车光电组中最常用的传感器之一,其主要作用是对赛道上各种异物或者障碍进行探测,从而实现自主避障。
红外线传感器有两种,一种是红外线避障传感器,主要检测前方是否有障碍物。
另一种是寻迹传感器,主要检测车辆行进轨迹及车轮边界。
这两种传感器都通过发射一束红外线,然后检测红外线反射信号的强弱,来判断当前道路状态。
智能车中多数采用两种红外线传感器的组合,一个用于永久性突出物体的检测和避障功能,一个用于寻迹,检测当前赛道行驶的状态。
这种组合方案在实际使用中既能够减小了智能车的体积,同时也能够同时满足避障和寻迹两种功能的需求。
三、光耦传感器光耦传感器主要是测量霍尔电压,电容电压,电阻电压等物理量,全局范围内掌握智能车行驶的状态,构成智能车控制系统的重要部分。
通过对各种物理量的感应,对智能车进行动态实时控制。
如针对车速问题,可以采用霍尔电压测量方法,对车辆运动状态进行简单的判断。
智能车中采用光电传感器和电路配合的方法,还可以实现车辆行驶过程中的速度随时控制和加速度调整。
四、光电限位传感器光电限位传感器是一种可以控制智能车极限运动状态的传感器。
传感器通过实时控制智能车运动状态,避免车辆因超出极限而出现事故。
光电限位传感器一般分为三种,分别是机械限位传感器、磁性限位传感器和光电限位传感器。
传感器固定在车架上,在车辆行驶过程中限定车辆的行驶限度,从而确保车辆的安全性。
五、结论智能车光电传感器组是智能车控制系统中的重要组成部分。
它通过对周围环境的感知和探测来确保车辆的安全和自主导航。
第六届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:华北科技学院队伍名称:华科电信光电1队参赛队员:梁学军孙峰吴龙鑫带队老师:王江华苗志全关于技术报告和研究论文使用授权的说明本人完全了解第一届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:摘要本智能车系统以MC9S12XS128微控制器为核心,通过摄像头检测模型车的运动位置和运动方向,用光电传感器检测模型车的速度。
使用PID 控制算法调节驱动电机的转速和舵机的角度,完成对模型车运动速度和运动方向的闭环控制。
为了调试智能车的行驶速度和稳定性,我们使用SD卡、液晶等调试手段,进行了大量的数据分析。
实验结果表明,该系统设计方案可行。
关键字:MC9S12XS128、PID、SD卡、驱动、角速度目录摘要........................................................ I II 第一章引言 (1)第二章总体方案的设计 (2)2.1设计制作思路 (2)2.2系统的组成 (2)第三章硬件电路设计 (5)3.1主控板模块和电源模块 (5)3.1.1 主控板模块 (5)3.1.2 电源电路模块 (6)3.1.3 放电模块 (6)3.2 电机驱动电路 (7)3.3 测速传感器模块 (9)3.4激光传感器的设计 (11)3.5.坡道处理 (12)第四章智能车整体机械改造 (15)4.1 舵机的安装 (15)4.2 车轮倾角的更改 (16)4.3 智能车底盘的降低 (16)4.4 整体车的重心的调整 (17)4.5 传感器位置的安装与固定 (17)4.6 其他部分的调整 (17)第五章软件编程 (18)5.1 速度控制 (18)5.2 打角转向 (19)5.3 起跑线识别 (19)5.4 对传感器返回值的处理 (19)第六章开发工具、调试过程、智能车整体参数说明 (21)6.1 开发工具 (21)6.2 调试过程 (21)6.3 主要技术参数 (22)第七章总结 (23)致谢 (24)参考文献 (25)附录 (26)第六届全国大学生“飞思卡尔”杯智能汽车竞赛技术报告第一章引言智能车一般主要由路径识别、速度采集、角度控制及车速控制等模块组成。
第九届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:西南交通大学队伍名称:Flamingo参赛队员:王文婕安盼盼杨润耀带队教师:蒋朝根吴宗玲关于技术报告和研究论文使用授权的说明本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:王文婕安盼盼杨润耀带队教师签名:蒋朝根吴宗玲日期:2014年8月10日目录第一章引言 (1)1.1飞思卡尔智能汽车比赛介绍 (1)1.1.1飞思卡尔智能汽车竞赛简介 (1)1.2.2比赛规则介绍 (2)1.2.3器材限制规定 (2)第二章整体设计方案 (6)2.1整体系统概述 (6)第三章车模机械设计 (7)3.1 车模规格 (7)3.2 舵机的安装 (8)3.3 底盘设计 (9)3.4 CCD的安装 (9)3.5 编码器的安装 (10)3.6 前轮的调整 (10)3.7 后轮的调整 (12)第四章车模电路设计 (13)4.1主控芯片 (13)4.2主控板 (14)4.2.1电源部分 (14)4.2.2 MCU部分 (15)4.3驱动方案 (16)4.4 CCD模块 (17)4.4.1 CCD的大体参数 (17)4.5液晶和键盘模块 (18)4.6无线蓝牙 (18)第五章软件设计 (19)5.1程序整体设计 (19)5.2各模块控制分析 (20)5.2.1 CCD传感器控制 (21)5.2.2 SD-5舵机控制 (26)5.2.3 B车模电机控制 (28)5.3 速度控制相关原理 (30)第六章调试系统说明 (31)6.1蓝牙无线串口 (31)6.2 Labview上位机软件及速度的调试 (32)6.3 上位机软件及信号和巡线的调试 (33)第七章K60的简介 (34)7.1 Kinetis 系列及K60 (34)7.2 K60 开发环境和流程 (35)第八章鸣谢与总结 (37)参考文献 (38)附录 (39)第一章引言第一章引言1.1飞思卡尔智能汽车比赛介绍1.1.1飞思卡尔智能汽车竞赛简介教育部为了加强大学生实践、创新能力和团队精神的培养,在已举办全国大学生数学建模、电子设计、机械设计、结构设计等四大竞赛的基础上,委托教育部高等学校自动化专业教学指导分委员会主办每年一度的全国大学生智能汽车竞赛。
第八届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告关于技术报告和研究论文使用授权地说明本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文地规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品地设计方案、技术报告以及参赛模型车地视频、图像资料,并将相关内容编纂收录在组委会出版论文集中.参赛队员签名:带队老师签名:日期:摘要本文介绍了常熟理工学院物电电磁一队电磁车地成果.智能车地硬件平台采用带MC9S12XS128 处理器,软件平台为CodeWarrior IDE 开发环境,车模采用大赛组委会统一提供地A型车模.文中介绍了智能车机械结构调整,传感器电路设计,舵机、电机控制算法以及起跑线地检测等.车模以MC9S12XS128单片机为控制核心,以安装在车体前地工字电感作为循迹传感器,采用干簧管检测起跑线,以欧姆龙编码器检测速度信息.车模系统地简单工作原理是MC9S12XS128单片机通过AD口采集电感检测地拟量,并通过算法处理,然后返回值用于舵机控制,根据编码器返回值进行电机地闭环控制.通过串口,借用蓝牙等工具进行舵机PD参数,电机PID地调节,以及整定传感器参数地整合处理.关键字:智能车、电机PID控制、舵机PD控制、电磁寻线目录第一章总体方案设计----------------------------------------------------------------- 6第二章智能车机械结构调整与优化---------------------------------------------- 82.1 主销内倾 -------------------------------------------------------------- 92.2 主销后倾 -------------------------------------------------------------- 92.3 外倾角---------------------------------------------------------------- 102.4 车轮安装示意图如下:------------------------------------------- 122.5 舵机地安装--------------------------------------------------------- 122.6 舵机安装示意图如下:------------------------------------------- 132.7 小结-------------------------------------------------------------------------- 13第三章电路设计说明--------------------------------------------------------------- 133.1 电源模块 ------------------------------------------------------------------- 143.2 传感器模块 ---------------------------------------------------------------- 143.3 电机模块 -------------------------------------------------------------------- 153.4 舵机模块 -------------------------------------------------------------------- 153.5最小系统板设计 ----------------------------------------------------------- 163.6系统主板设计 -------------------------------------------------------------- 173.7小结--------------------------------------------------------------------------- 17第四章智能车控制软件设计说明 ------------------------------------------------ 194.1 软件设计总体框架------------------------------------------------------- 194.2 电机PID控制 ------------------------------------------------------------ 194.3 舵机地控制 ---------------------------------------------------------- 234.4 传感器数据地处理------------------------------------------------------- 244.5 小结-------------------------------------------------------------------------- 24第5章开发工具、制作、安装、调试过程说明 ----------------------------- 245.1 软件编译环境 ------------------------------------------------------ 245.2 显示模块 ------------------------------------------------------------- 255.3 蓝牙调试模块 ------------------------------------------------------ 255.4 上位机调试 --------------------------------------------------------- 265.5 本章小结 ------------------------------------------------------------ 27模型车地主要技术参数说明 ------------------------------------------------------- 28结论 -------------------------------------------------------------------------------------- 29参考文献 -------------------------------------------------------------------------------- 30附录A:程序源代码 ---------------------------------------------------------------- 31引言智能车辆是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体地综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型地高新技术综合体.目前对智能车辆地研究主要致力于提高汽车地安全性、舒适性,以及提供优良地人车交互界面.近年来,智能车辆己经成为世界车辆工程领域研究地热点和汽车工业增长地新动力,很多发达国家都将其纳入到各自重点发展地智能交通系统当中.熒绐譏钲鏌觶鷹緇機库。
第三届全国大学生“飞思卡尔”杯智能汽车竞赛光电对管智能车技术报告学 校:湖北汽车工业学院队伍名称:湖北汽车工业学院光电二号参赛队员:葛焕九赵玉林张贤勇指导教师:柴旺兴雷钧关于技术报告和研究论文使用授权的说明本人完全了解第三届全国大学生“飞思卡尔”杯智能汽车竞赛有关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:II目录第1章引言 (1)1.1 路径信息的采集 (2)1.2 对采集到的数据进行分析 (2)1.2.1 引导线的识别 (2)1.2.2 获取赛道信息 (3)1.3 智能车控制决策 (3)1.4 智能车执行单元 (3)第2章智能车硬件设计方案 (5)2.1 硬件方案设计概述 (5)2.1.1 中央控制电路 (6)2.1.2 红外光电传感器 (6)2.1.3 主电机及舵机驱动 (6)2.1.4 速度传感器 (7)2.1.5 人机界面 (7)2.1.6 电源模块 (7)2.2 中央控制电路 (7)2.3 红外光电传感器 (9)2.4 主电机的驱动 (10)2.4.1 基于H桥芯片MC33886的主电机驱动方案 (10)2.4.2 电机驱动电路 (11)2.5 速度传感器 (12)2.6 人机界面 (13)2.7 电源系统 (14)2.8 总装配方案 (15)第3章软件设计方案 (18)3.1 开发调试平台 (18)3.2 信息采集与数据分析 (19)I3.3 舵机控制算法 (20)3.3.1舵机转向角度分配 (21)3.3.2 方向控制策略 (21)3.3.3舵机PID整定 (21)3.4 驱动电机控制算法 (21)3.4.1 速度控制策略 (21)3.4.2 bang_bang 控制 (22)第4章赛车机械结构调整 (23)4.1底盘的调整 (23)4.2 前轮的调整 (23)4.3 后轮距及后轮差速的调整 (24)4.4 齿轮传动机构的调整 (25)4.5 舵机的改装 (25)第5章调试说明 (26)5.1 硬件电路的调试 (26)5.2 控制策略的调试 (26)5.3 机械结构的调试 (27)第6章小车模型改造后的主要技术参数 (28)第7章结束语 (29)7.1 问题与思考 (29)7.2 不足与改进 (29)参考文献 (30)附件A 源程序 (31)II第1章引言全国大学生智能汽车比赛是经全国高等教育司研究,委托高等学校自动化专业教学指导分委会主办的,旨在培养创新精神、协作精神,提高工程实践能力的科技活动。
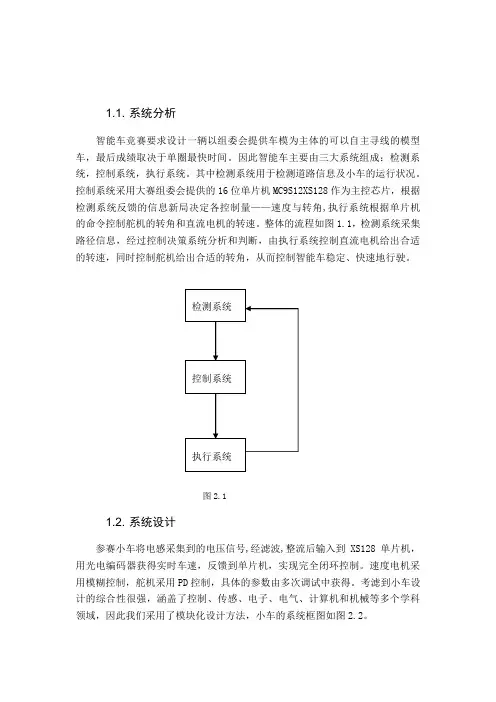
1.1. 系统分析智能车竞赛要求设计一辆以组委会提供车模为主体的可以自主寻线的模型车,最后成绩取决于单圈最快时间。
因此智能车主要由三大系统组成:检测系统,控制系统,执行系统。
其中检测系统用于检测道路信息及小车的运行状况。
控制系统采用大赛组委会提供的16位单片机MC9S12XS128作为主控芯片,根据检测系统反馈的信息新局决定各控制量——速度与转角,执行系统根据单片机的命令控制舵机的转角和直流电机的转速。
整体的流程如图1.1,检测系统采集路径信息,经过控制决策系统分析和判断,由执行系统控制直流电机给出合适的转速,同时控制舵机给出合适的转角,从而控制智能车稳定、快速地行驶。
图2.11.2. 系统设计参赛小车将电感采集到的电压信号,经滤波,整流后输入到XS128单片机,用光电编码器获得实时车速,反馈到单片机,实现完全闭环控制。
速度电机采用模糊控制,舵机采用PD控制,具体的参数由多次调试中获得。
考滤到小车设计的综合性很强,涵盖了控制、传感、电子、电气、计算机和机械等多个学科领域,因此我们采用了模块化设计方法,小车的系统框图如图2.2。
第五届全国大学生智能汽车竞赛技术报告图2.21.3. 整车外观图2.31.4. 赛车的基本参数智能车竞赛所使用的车模是东莞市博思公司生产的G768型车模,由大赛组委会统一提供,是一款带有摩擦式差速器后轮驱动的电动模型车。
车模外观如图3.1。
车模基本参数如表3.1。
图3.1表3.1车模基本参数1.5. 赛车前轮定位参数的选定第五届全国大学生智能汽车竞赛技术报告现代汽车在正常行驶过程中,为了使汽车直线行驶稳定,转向轻便,转向后能自动回正,减少轮胎和转向系零件的磨损等,在转向轮、转向节和前轴之间须形成一定的相对安装位置,叫车轮定位,其主要的参数有:主销后倾、主销内倾、车轮外倾和前束。
模型车的前轮定位参数都允许作适当调整,故此我们将自身专业课所学的理论知识与实际调车中的赛车状况相结合,最终得出赛车匹配后的前轮参数[6]。
第十届"飞思卡尔"杯全国大学生智能汽车竞赛技术报告第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:电子科技大学摘要本文设计的智能车系统以MK60DN512ZVLQ10微控制器为核心控制单元,通过CMOS摄像头检测赛道信息,使用模拟比较器对图像进行硬件二值化,提取黑色引导线,用于赛道识别;通过编码器检测模型车的实时速度,使用PID控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
关键字:MK60DN512ZVLQ10,CMOS,PIDAbstractIn this paper we will design a smart car system based on MK60DN512ZVLQ10as the micro-controller unit. We use a CMOS image sensor to obtain lane image information. Then convert the original image into the binary image by the analog comparator circuit in order to extract black guide line for track identification. An inferred sensor is used to measure the car`s moving speed. We use PID control method to adjust the rotate speed of driving electromotor and direction of steering electromotor, to achieve the closed-loop control for the speed and direction.Keywords: MK60DN512ZVLQ10,CMOS,PID目录摘要 (II)Abstract (III)目录............................................................................................................................ I V 引言.. (1)第一章系统总体设计 (2)1.1系统概述 (2)1.2整车布局 (3)第二章机械系统设计及实现 (4)2.1智能车机械参数调节 (4)2.1.1 前轮调整 (4)2.1.2其他部分调整 (6)2.2底盘高度的调整 (7)2.3编码器的安装 (7)2.4舵机转向结构的调整 (8)2.5摄像头的安装 (9)第三章硬件系统设计及实现 (11)3.1 MK60DN512ZVLL10主控模块 (12)3.2电源管理模块 (12)3.3 摄像头模块 (14)3.4电机驱动模块 (15)3.5测速模块 (16)3.6陀螺仪模块 (16)3.7灯塔检测模块 (16)3.8辅助调试模块 (17)第四章软件系统设计及实现 (19)4.1赛道中心线提取及优化处理 (19)4.1.1原始图像的特点 (19)4.1.2赛道边沿提取 (20)4.1.3推算中心 (21)4.1.4路径选择 (23)4.2 PID 控制算法介绍 (23)4.2.1位置式PID (24)4.2.2增量式PID (25)4.2.3 PID参数整定 (25)4.3转向舵机的PID控制算法 (25)4.4驱动电机的PID控制算法 (26)第五章系统开发及调试工具 (27)5.1开发工具 (27)5.2上位机图像调试 (27)5.3SD卡模块 (27)5.3.1SD卡介绍 (27)5.3.2 SPI总线介绍 (28)5.3.3软件实现 (28)第六章模型车的主要技术参数 (30)结论 (31)参考文献 (I)附录A:电原理图 (II)附录B:程序源代码................................................................................................... I V引言随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。
第八届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学 校:山东理工大学队伍名称:Finger队参赛队员: 曹亚飞谢云飞于在水带队教师:刘国柱 刘连鑫关于技术报告和研究论文使用授权的说明本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:摘要智能车也称轮式机器人,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一身的综合系统。
智能车竞赛以当前迅猛发展的汽车电子为背景,是涵盖了自动控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科交叉的科技创意性比赛。
参赛队员在统一的实物平台基础上,制作一个能够自主识别路线的智能车,在专门设计的跑道上高速自动行驶,小车的成绩取决于单圈行驶所用的时间。
本课题是设计并实现一种基于飞思卡尔MC9S12XS128单片机的线性CCD循迹自平衡智能车。
本课题中,采用组委会统一指定的D型车模作为智能小车基本载体,采用了飞思卡尔半导体公司生产的高可靠性的16 位单片机 MC9S12XS128 作为控制核心,采用Texas Advanced Optoelectronic Solution 公司的TSL1401系列的线性CCD传感器来检测道路状况作为小车自动运行的依据。
设计目标是使智能小车在保持平衡的基础上,能在弯曲不平的道路上自主循迹运行,不偏离道路,并且速度越快越好。
课题中采用线性CCD传感器对赛道进行检测,并通过控制策略使小车平稳快速的跑完赛道全程。
论文介绍了Finger队光电平衡组智能车的总体设计方案、直立及和循迹原理、以及各个模块的硬件组成和软件设计。
关键词:智能车 线性CCD 自平衡 单片机 自动寻迹目录第一章引言 (1)1.1概述 (1)1.2系统总体设计方案 (1)第二章整体方案设计 (3)2.1 设计构思 (3)2.2 整车设计 (3)2.2.1 底盘加固 (3)2.2.2 改装电池位置 (4)2.2.3 传感器的选择 (5)第三章硬件电路设计 (7)3.1 单片机最小系统 (7)3.2 电源模块设计 (7)3.3传感器电路设计 (8)3.3.1 线性CCD传感器 (9)3.3.2姿态传感器 (10)3.3.3速度传感器 (11)3.3.4 起跑线检测传感器 (11)3.4 电机驱动电路设计 (12)3.5辅助调试电路 (13)3.5.1 LCD液晶显示模块 (13)3.5.2 键盘检测电路 (14)目录3.5.3 串口调试电路 (14)第四章智能车系统软件设计 (15)4.1智能车控制系统总体方案 (15)4.1.1 PID 算法工作原理 (16)4.2车模平衡控制 (16)4.3车模速度控制 (18)4.4车模方向控制 (19)第五章系统调试 (25)5.1上位机调试 (25)5.2参数整定 (26)第六章智能车主要技术参数说明 (28)6.1 智能车外形参数 (28)6.2 电路部分参数 (28)6.3 传感器个数以及种类 (28)6.4赛道信息检测频率 (28)第七章结论 (29)参考文献 (30)附录主程序源代码 (I)第一章引言1.1概述飞思卡尔杯全国大学生智能车竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,涵盖了机械、模式识别、电子、电气、传感技术、计算机、自动化控制、汽车理论等多方面知识,从一定程度上反映了当代大学生综合运用所学知识和探索创新的精神。
第八届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:西南交通大学队伍名称:Simple参赛队员:陈佳兴齐辉付鑫带队教师:蒋朝根龙文杰关于技术报告和研究论文使用授权的说明本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:陈佳兴齐辉付鑫带队教师签名:蒋朝根龙文杰日期:2013年8月14日目录第一章引言 (1)1.1飞思卡尔智能汽车比赛介绍 (1)1.1.1飞思卡尔智能汽车竞赛简介 (1)1.2.2比赛规则介绍 (2)1.2.3器材限制规定 (3)第二章整体设计方案 (6)2.1整个系统概述 (6)第三章车模机械设计 (7)3.1车模轮胎的处理 (8)3.2车模编码器的安装 (8)3.3车模电池的放置位置与配重 (9)4陀螺仪的安放位置 (11)第四章车模电路设计 (12)4.1主控芯片 (12)4.1驱动方案 (13)4.2液晶和键盘模块 (13)4.3无线蓝牙 (14)4.4主控板 (14)4.5 CCD模块 (17)4.5.1 CCD的大体参数 (17)4.5.2控制信号 (18)4.6关于电容传感器个数和车的一些参数 (19)第五章直立原理 (19)5.1车模平衡控制 (19)5.2测量车模的角度的传感器 (20)5.3互补滤波 (21)第六章程序控制说明 (22)6.1 直立控制 (22)6.2 速度控制 (24)6.3 转向控制 (26)第七章开发工具、调试系统说明 (27)7.1蓝牙无线串口 (27)7.2 Labveiw上位机软件 (28)7.3 ccd软件 (32)7.3 matlab做的数据分析 (33)第八章鸣谢与总结 (34)参考文献 (34)附录代码 (36)CCD (36)OLED (38)卡尔曼 (52)互补 (53)速度控制 (54)第一章引言1.1飞思卡尔智能汽车比赛介绍1.1.1飞思卡尔智能汽车竞赛简介飞思卡尔公司开发嵌入式解决方案的历史可追溯到50多年前,现在,已发展成为在20多个国家设有业务机构,拥有 20,000多名员工的实力强大的独立企业。
第九届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:烟台大学队伍名称:super car带队教师:刘殿通参赛队员:柳胜凯、张亚超、许高关于技术报告和研究论文使用授权的说明本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:关于技术报告和研究论文使用授权的说明 (2)引言 (3)第一章方案设计 (1)1.1系统总体方案的选定 (1)1.2系统总体方案的设计 (2)1.3 小结 (1)第二章智能汽车机械结构调整与优化 (2)2.1智能汽车车体机械建模 (2)2.2智能汽车传感器的安装 (2)第三章硬件系统设计及实现 (6)3.1硬件设计方案 (6)3.2线性CCD传感器 (9)3.3 小结 (10)第四章传感器 (10)4.1传感器路径识别状态分析 (10)第五章开发工具、制作、安装、调试过程 (15)5.1 开发工具 (15)5.2 调试过程 (16)结论 (16)引言全国大学生智能汽车竞赛是以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。
本竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。
在本次比赛中,本组使用大赛组委会统一提供的竞赛车模,采用飞思卡尔32 位微控制器MK60DN512ZVLQ10作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、舵机控制等,最终实现一套能够自主识别路线,并且可以实时输出车体状态的智能车控制系统。
第八届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告关于技术报告和研究论文使用授权的说明本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队老师签名:日期:摘要本文介绍了常熟理工学院物电电磁一队电磁车的成果。
智能车的硬件平台采用带MC9S12XS128 处理器,软件平台为CodeWarrior IDE 开发环境,车模采用大赛组委会统一提供的A型车模。
文中介绍了智能车机械结构调整,传感器电路设计,舵机、电机控制算法以及起跑线的检测等。
车模以MC9S12XS128单片机为控制核心,以安装在车体前的工字电感作为循迹传感器,采用干簧管检测起跑线,以欧姆龙编码器检测速度信息。
车模系统的简单工作原理是MC9S12XS128单片机通过AD口采集电感检测的拟量,并通过算法处理,然后返回值用于舵机控制,根据编码器返回值进行电机的闭环控制。
通过串口,借用蓝牙等工具进行舵机PD参数,电机PID的调节,以及整定传感器参数的整合处理。
关键字:智能车、电机PID控制、舵机PD控制、电磁寻线目录第一章总体方案设计------------------------------------------------------------------------------------------- 6 第二章智能车机械结构调整与优化 ------------------------------------------------------------------------ 92.1 主销内倾 ----------------------------------------------------------------------------------------- 92.2 主销后倾 --------------------------------------------------------------------------------------- 102.3 外倾角------------------------------------------------------------------------------------------ 112.4 车轮安装示意图如下:--------------------------------------------------------------------- 122.5 舵机的安装 --------------------------------------------------------------------------------- 122.6 舵机安装示意图如下:--------------------------------------------------------------------- 132.7 小结 --------------------------------------------------------------------------------------------------- 13 第三章电路设计说明 --------------------------------------------------------------------------------------- 143.1 电源模块--------------------------------------------------------------------------------------------- 143.2 传感器模块------------------------------------------------------------------------------------------ 153.3 电机模块 ---------------------------------------------------------------------------------------------- 153.4 舵机模块 ---------------------------------------------------------------------------------------------- 163.5最小系统板设计-------------------------------------------------------------------------------------- 163.6系统主板设计----------------------------------------------------------------------------------------- 173.7小结 ----------------------------------------------------------------------------------------------------- 18 第四章智能车控制软件设计说明 ------------------------------------------------------------------------- 194.1 软件设计总体框架 -------------------------------------------------------------------------------- 194.2 电机PID控制------------------------------------------------------------------------------------- 204.3 舵机的控制 ------------------------------------------------------------------------------------ 234.4 传感器数据的处理 -------------------------------------------------------------------------------- 244.5 小结 --------------------------------------------------------------------------------------------------- 24 第5章开发工具、制作、安装、调试过程说明 ------------------------------------------------------ 255.1 软件编译环境 ------------------------------------------------------------------------------- 255.2 显示模块 --------------------------------------------------------------------------------------- 255.3 蓝牙调试模块 ------------------------------------------------------------------------------- 265.4 上位机调试----------------------------------------------------------------------------------- 265.5 本章小结-------------------------------------------------------------------------------------- 27 模型车的主要技术参数说明 --------------------------------------------------------------------------------- 28 结论 ---------------------------------------------------------------------------------------------------------------- 29 参考文献 ---------------------------------------------------------------------------------------------------------- 31 附录A:程序源代码 ------------------------------------------------------------------------------------------ 32引言智能车辆是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。
目前对智能车辆的研究主要致力于提高汽车的安全性、舒适性,以及提供优良的人车交互界面。
近年来,智能车辆己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。
在本文中,我们详细介绍了基于电磁传感器智能车系统。
详细介绍车体机械结构的调整,传感器电路的设计,舵机控制算法,电机控制算法。
在做车的整个过程中,培养了我们团队合作能力,动手的能力,创新的能力,对我们今后的学习积极的影响。
第一章总体方案设计1.1 车体结构的总体设计:(1)为了降低重心,主控板,电池尽量靠后就低放置。
(2)考虑到放远前瞻(约40 CM)可能带来车头过重,我们尽量选用尺寸小的10 mh的电感。
选用重量轻的航模碳素杆作为支架。
(3)舵机直立安装,连杆加长,提高响应速度。
( 4 ) 传感器电路放置在车体的尾部。
1.2 整体车模如下图:图1.2.1 整体车模左视图图1.2.2 整体车模俯视图1.3 本章小结智能车能够即稳定又快速的行驶,可以说车体的结构占很大一部分比重。
由于我们组作为二年级学生第一次参赛,经验尚缺,前期没有对车体结构作太多调整,所以后来发现再怎么调软件,也不能很好行驶。