现代传感技术
- 格式:doc
- 大小:627.00 KB
- 文档页数:9
传感手段用到的技术传感技术是指利用物理、化学、生物等原理和方法,采集和测量环境中的各种参数,并将其转换为电信号或其他可识别的形式,用于监测、控制和判断的技术。
在现代科技发展中,传感技术已经广泛应用于各个领域,包括环境监测、医疗诊断、智能家居、工业自动化等。
下面将介绍几种常见的传感技术及其应用。
1. 光学传感技术光学传感技术利用光的特性对环境进行测量和监测。
其中,光纤传感技术是一种基于光的传感技术,它利用光纤的折射、反射等特性来实现对物理量的测量。
光纤传感技术在环境监测中可以用于测量温度、压力、湿度等参数,还可以应用于医疗诊断、石油化工等领域。
2. 电化学传感技术电化学传感技术是利用电化学方法来测量和监测环境中的化学物质。
电化学传感器通过测量电流、电势等参数来获得化学物质的浓度或活性。
电化学传感技术在环境监测中可以用于检测水质、大气污染物等,也广泛应用于医疗、食品安全等领域。
3. 生物传感技术生物传感技术利用生物体或其组成部分对环境中的生物参数进行检测和测量。
例如,生物传感器可以利用酶、抗体等生物分子对特定物质进行识别和测量,用于医疗诊断、食品安全等领域。
生物传感技术还可以应用于生物医学工程、生态监测等领域。
4. 磁学传感技术磁学传感技术利用磁场的特性来测量和监测环境中的物理量。
例如,磁传感器可以通过测量磁场的强度和方向来获取位置、速度等参数。
磁学传感技术在导航、机器人、车辆控制等领域有着重要的应用。
5. 声学传感技术声学传感技术利用声波的传播和反射特性来测量和监测环境中的物理量。
例如,超声波传感器可以利用声波的传播时间来测量距离,应用于测距、无损检测等领域。
声学传感技术还可以应用于声学定位、声学通信等领域。
总结起来,传感技术是一种利用物理、化学、生物等原理和方法,将环境中的各种参数转换为可识别的形式的技术。
光学传感技术、电化学传感技术、生物传感技术、磁学传感技术和声学传感技术是其中常见的几种技术。
传感手段用到的技术传感技术是通过各种传感器设备来实现对环境信息的感知和采集,进而进行数据处理和应用的一种技术手段。
本文将从不同的角度介绍几种常见的传感技术,包括声音传感技术、光学传感技术、温度传感技术和压力传感技术。
一、声音传感技术声音传感技术是通过声音传感器对声音信号进行感知和采集的技术。
声音传感技术有广泛的应用领域,如语音识别、声纹识别、环境噪声监测等。
在语音识别方面,声音传感技术可以通过采集人的语音信号来进行语音识别,实现人机交互。
而在声纹识别方面,声音传感技术可以通过采集人的声纹信息来进行身份识别,实现个人认证。
此外,声音传感技术还可以用于环境噪声监测,通过采集环境中的声音信号来评估环境噪声水平,为环境保护和城市规划提供参考依据。
二、光学传感技术光学传感技术是通过光学传感器对光信号进行感知和采集的技术。
光学传感技术在很多领域都有应用,如图像识别、光学测量、光学通信等。
在图像识别方面,光学传感技术可以通过采集图像信息来进行图像识别,实现物体识别和图像处理。
在光学测量方面,光学传感技术可以通过采集光信号来进行距离测量、位移测量等,实现精密测量。
此外,光学传感技术还可以应用于光学通信领域,通过采集光信号来进行信息传输,实现高速通信。
三、温度传感技术温度传感技术是通过温度传感器对温度信号进行感知和采集的技术。
温度传感技术在很多领域都有应用,如气象预测、工业自动化、医疗监护等。
在气象预测方面,温度传感技术可以通过采集大气中的温度信息来进行天气预测,为气象预报提供数据支持。
在工业自动化方面,温度传感技术可以通过采集设备和环境的温度信息,实现对工业过程的控制和监测。
此外,温度传感技术还可以应用于医疗监护领域,通过采集人体的温度信息来进行健康监测,实现疾病预防和治疗。
四、压力传感技术压力传感技术是通过压力传感器对压力信号进行感知和采集的技术。
压力传感技术在很多领域都有应用,如工业制造、汽车制造、医疗设备等。
思考题1.传感器一般包括哪些部分,各部分的作用是什么?答:1、敏感元件:直接感受被测量,以确定的关系输出某一物理量(包括电学量)。
2、转换元件:将敏感元件输出的非电量物理量转换为电学量(包括电路参数量)。
3、转换电路:将电路参数(如电阻、电容、电感)量转换成便于测量的电学量(如电压、电流、频率等)。
2.从传感器的结构形式来划分,可将传感器按其构成方法分为哪几类?各类型的特点是什么?并画出各类型的结构简图。
答:1.通用型、2.参比型、3.差动型、4.反馈型。
1.通用型根据组成可分为:能量变换基本型、能量控制基本型、能量变换特殊型(辅助能源型)、电路参数型和多级变换型。
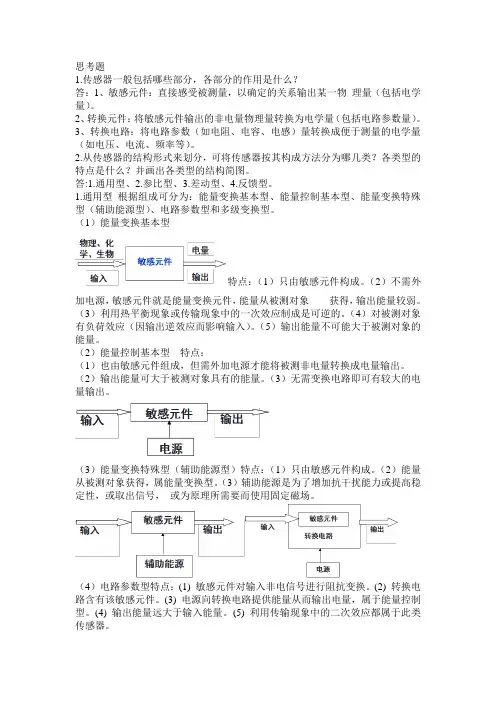
(1)能量变换基本型特点:(1)只由敏感元件构成。
(2)不需外加电源,敏感元件就是能量变换元件,能量从被测对象获得,输出能量较弱。
(3)利用热平衡现象或传输现象中的一次效应制成是可逆的。
(4)对被测对象有负荷效应(因输出逆效应而影响输入)。
(5)输出能量不可能大于被测对象的能量。
(2)能量控制基本型特点:(1)也由敏感元件组成,但需外加电源才能将被测非电量转换成电量输出。
(2)输出能量可大于被测对象具有的能量。
(3)无需变换电路即可有较大的电量输出。
(3)能量变换特殊型(辅助能源型)特点:(1)只由敏感元件构成。
(2)能量从被测对象获得,属能量变换型。
(3)辅助能源是为了增加抗干扰能力或提高稳定性,或取出信号,或为原理所需要而使用固定磁场。
(4)电路参数型特点:(1) 敏感元件对输入非电信号进行阻抗变换。
(2) 转换电路含有该敏感元件。
(3) 电源向转换电路提供能量从而输出电量,属于能量控制型。
(4) 输出能量远大于输入能量。
(5) 利用传输现象中的二次效应都属于此类传感器。
5)多级变换型2.参比补偿型特点:(1) 采用两个(或两个以上)性能完全相同的敏感元件。
其中一个感受被测量和环境量,另一个只感受环境量作补偿用。
(2) 两个敏感元件同时接到电桥的相邻两臂或反串。
传感器技术发展动态与展望现代信息技术的三大支柱是传感器技术、通信技术和计算机技术, 它们分别完成对被测量的信息提取、信息传输及信息处理。
目前, 信息传输与处理技术已取得突破性进展, 然而传感器的发展相对滞后。
在今天信息时代, 各种控制系统自动化程度、复杂性以及环境适应性(如高温、高速、野外、地下、高空等)要求越来越高, 需要获取的信息量越来越多,它不仅对传感器测量精度、响应速度、可靠性提出了很高的要求, 而且需求信号远距离传输。
显然,传统的传感器已很难满足要求,发展集成化、微型化、智能化、网络化传感器将成为传感器技术的主流和方向。
传感器的集成化传感器的集成化是利用集成电路制作技术和微机械加工技术将多个功能相同、功能相近或功能不同的传感器件集成为一维线型传感器或二维面型(阵列)传感器;或利用微电子电路制作技术和微型计算机接口技术将传感器与信号调理、补偿等电路集成在同一芯片上。
前一种集成具体可分为三种类型:(1)将多个功能相同的敏感元件集成在同一芯片上,检测被测量的线状、面状、甚至体状的分布信息,例如固态图像传感器(CCD阵列光敏器件,它不仅在自动化生产线上发挥“视觉”作用(例如纺织品质量检查及大规模集成电路图形检查等),而且在天文罗盘、星体跟踪、卫星遥感装置上也开始应用。
(2)将多个结构相似、功能相近的敏感元件集成在同一芯片上,在保证测量精度的扩大传感器的测量范围。
例如将不同气敏元件集成在一起组成,利用各种气敏元件对不同气体的敏感效应,采用神经网络及模式识别等先进的数据处理技术,对混合气体的各组分同时监测,得到混合气体的有关信息,同时提高气敏传感器的测量精度。
这种方式还可将不同量程的传感元件进行集成, 根据被测量的大小在各传感元件之间进行切换。
(3)将多个不同功能的敏感元件集成在同一芯片上,使传感器能测量不同性质的参数,实现综合检测。
例如集成压力、温度、湿度、流量、加速度、化学等不同功能敏感元件的传感器,能同时检测外界环境的物理特性或化学特性,从而实现多环境的多参数综合监测。
现代传感技术与应用课程设计一、课程设计概述传感器技术是当今科技发展水平的重要标志,它的应用范围非常广泛,涉及到生活、军事、医疗、环保等众多领域。
本课程旨在介绍现代传感技术的基本原理、应用场景及相关技术设计,通过实践操作,使学生能够掌握传感器的设计原理、调试方法、数据处理技巧,培养学生的自主学习和解决实际问题的能力。
二、课程设计内容1.传感器的基本原理与分类本部分将介绍传感器的基本原理、分类以及选型原则等相关知识,重点说明各种类型传感器的工作原理和电路结构,包括:温度传感器、压力传感器、光电传感器、磁电传感器等。
2.传感器电路设计学生将会学习到传感器电路的设计方法,理解各种电路要素的作用,以及如何根据实际需求设计电路。
此外,还将介绍如何使用开发板进行简单的电路搭建与测试,并通过实际的案例进行操作演示。
3.传感器数据处理与分析本部分将介绍如何使用C语言进行传感器数据采集、处理与分析,并通过实际案例进行讲解和演示。
学生将会了解到如何设计程序对采集到的传感器数据进行分析,并对数据进行可视化展示。
4.课程实践项目本部分将根据学生的不同意愿和兴趣,提供不同类型的实践项目选择,如模拟太阳能光伏电池的温度、压力、光强等数据,设计并实现智能管理系统等。
学生将组成小组进行独立的实践操作,并最终汇报项目成果与演示。
三、课程设计目标通过本课程的学习,学生应该能够:1.理解传感器的基本原理、分类以及工作原理;2.掌握传感器电路设计的基本方法;3.掌握传感器数据采集、处理与分析方法;4.了解实时应用场景,思考实际应用方案;5.完成基于传感器的实践项目,提高团队协作和沟通能力;6.培养学生的自主学习和解决实际问题的能力。
四、课程评估方式本课程的成绩评估方式将主要由以下几个部分组成:•期中考试(40%):主要针对课堂理论知识进行考核;•课程作业(30%):主要针对实验报告、程序设计等进行评估;•课堂参与度(20%):主要针对学生课堂参与度进行评估;•实践项目(10%):主要针对项目成果进行评估。
现代传感技术教学设计引言随着科技的不断发展,传感技术已经渗透到了生活的方方面面,而现代传感技术已经成为了电子信息工程、自动化、通信等专业学科的必修课。
因此,现代传感技术的教学设计变得越来越重要。
在传感课程中,教师应当积极探索课程知识与实际应用之间的联系,将理论知识和实际应用相结合,使学生更好地理解传感技术的本质以及如何应用这些技术。
本文将分享一种现代传感技术教学的设计,可以帮助学生深度学习传感技术的理论基础,同时了解传感技术在不同工程行业中的应用。
教学内容线上课程教师应该提供在线课程,涵盖传感技术的基本概念、传感器分类和应用、信号处理和数据分析,以及传感技术在不同行业中的应用案例等。
在线课程应该由资深的学者或行业专家创建,为学生提供深度学习所需的实践和实例。
同时,为了使课程更加生动,教师可以将实验演示视频与课程一起发布。
实验课程教师应该提供基于真实场景的实验,以帮助学生理解课程中的理论知识。
实验课程应该包括以下几个方面:1.传感器测量和信号处理实验:学生可以根据自己的兴趣和专业选择相应的传感器,并使用Python、LabVIEW等编程语言进行数据采集和信号处理。
2.实践案例及综合设计实验:该实验可以帮助学生了解传感技术在工业、医疗、环保等领域中的应用,并充分发挥学生的创造力和动手能力,进行相应的综合设计项目。
课程评估教师应该为传感课程设置一个完整的评估体系,以了解学生的学习情况。
评估方法可以包括以下几种:1.课堂互动和问答:教师可以在课堂上与学生进行互动和问答,检查学生对课程内容的掌握程度。
2.每周作业:通过课后作业,教师可以了解学生的学习情况,及时发现和解决问题。
3.实验报告:学生应该撰写实验报告,从数据采集到处理和应用的全过程进行记录和总结,并证明他们的做法是否正确。
4.期末考试:教师可以在期末考试中结合课堂知识和相关实验进行考察,了解学生的实战能力。
教学资源为了保证教学效果,教师需要准备充足的资源,包括:1.传感器和实验装置:教室应该配备各种传感器和实验装置,以供学生使用。
现代rfid传感芯片技术参数一、简介RFID(Radio Frequency Identification)是一种新型的无线射频技术,也称为远程识别技术,该技术在探测、识别和追踪对象时,可以采用无线射频的方式,实现无连接的数据传输,是一种远距离、远程的无接触的信息识别技术,它通过读取射频信号来识别物体,并能够记录这些物体的数据,是依靠先进的射频技术来实现对物体的远距离识别的技术。
RFID 传感芯片是识别技术的关键部件,它由射频调制器和多种传感器组成,能够收集并存储大量的射频信号数据,比如位置信息、温度、湿度等。
RFID 传感芯片能够实现远距离的识别系统,这使得它们在监督和管理无线传感器节点时显得尤为重要。
二、RFID传感芯片技术参数1、工作频率:RFID传感芯片体系采用的工作频率可以分为高频(HF)、中频(MF)和低频(LF)三个频段,高频段为13.56MHz,中频段为125KHz~134KHz,低频段为10KHz~150KHz。
2、传输距离:RFID传感芯片无线传输距离一般以米为单位,具体取决于频段,信号发射功率等参数。
一般情况下,高频无线传输距离在3米以内,中频无线传输距离在50米以内,低频无线传输距离约为300米以内。
3、数据传输速率:RFID传感芯片数据传输速率一般以Kbps(千比特/秒)为单位,具体取决于频段、防干扰和信号增益的参数设置情况。
高频RFID传感芯片的数据传输速率一般为106Kbps,中频RFID 传感芯片的数据传输速率一般为9.6Kbps,低频RFID传感芯片的数据传输速率一般为1Kbps。
4、天线类型:RFID传感芯片的天线类型可以分为圆形、圆柱体和长方形三种类型,其中圆形天线结构简单易于操作,能够实现平面识别,圆柱体天线由多层结构组成,能够实现多维度的识别,而长方形天线则适用于对大范围内精确定位的需求。
5、功耗:RFID传感芯片的功耗是衡量该芯片性能的重要参数,一般以毫安(mA)为单位,具体取决于射频调制器和传感器等组成部件的设计。
现代传感技术与系统在当今科技飞速发展的时代,现代传感技术与系统正以惊人的速度改变着我们的生活和工作方式。
从智能手机中的各种传感器,到工业生产中的自动化检测设备,再到医疗领域的精准诊断工具,传感技术无处不在,为我们提供了丰富的数据和信息,使得我们能够更加智能、高效地应对各种挑战。
那么,什么是现代传感技术呢?简单来说,它是一种能够感知和检测物理世界中各种参数的技术手段。
这些参数可以包括温度、湿度、压力、光线强度、声音、位置、速度、加速度等等。
通过使用各种类型的传感器,将这些物理量转换为电信号或其他可测量的信号,然后经过处理和分析,我们就能够获得有关周围环境和对象的有用信息。
现代传感技术的核心在于传感器的设计和制造。
传感器的种类繁多,常见的有电阻式传感器、电容式传感器、电感式传感器、光电传感器、压电传感器、磁电传感器等等。
每种传感器都有其独特的工作原理和适用范围。
例如,电阻式传感器通常用于测量温度和压力,电容式传感器常用于检测位移和湿度,光电传感器则在检测光线和物体位置方面表现出色。
为了提高传感器的性能和精度,现代传感技术不断创新和发展。
一方面,材料科学的进步为传感器的制造提供了更好的选择。
新型的敏感材料,如纳米材料、高分子材料等,具有更高的灵敏度和稳定性,能够显著提升传感器的检测能力。
另一方面,微纳加工技术的应用使得传感器的尺寸越来越小,集成度越来越高。
微机电系统(MEMS)技术就是一个典型的例子,它可以将机械结构和电子元件集成在一个微小的芯片上,实现了传感器的微型化和智能化。
除了传感器本身,传感系统也是现代传感技术的重要组成部分。
一个完整的传感系统通常包括传感器、信号调理电路、数据采集与处理单元以及通信接口等部分。
信号调理电路的作用是对传感器输出的微弱信号进行放大、滤波和转换,使其能够被后续的处理单元所识别和处理。
数据采集与处理单元则负责对调理后的信号进行采集、分析和计算,提取出有用的信息。
通信接口则用于将处理后的信息传输到其他设备或系统,实现数据的共享和交互。
现代传感技术学后感近年来,随着科技的飞速发展,传感技术在各个领域得到了广泛应用。
作为一门研究感知与信息处理的学科,现代传感技术给我们带来了许多便利和改变。
通过学习现代传感技术,我深刻体会到了传感技术的重要性和广泛应用的前景。
现代传感技术在环境监测方面发挥了重要作用。
通过各种传感器的安装和数据采集,我们可以实时地监测到环境中的各种参数,如温度、湿度、气体浓度等。
这不仅有助于我们了解环境的变化,还可以及时发现并解决潜在的问题。
例如,在工业生产中,通过温度传感器监测设备运行时的温度变化,可以及时预警并防止设备过热导致的故障。
在城市管理中,通过空气质量传感器监测空气中的有害物质浓度,可以及时采取措施保护居民的健康。
现代传感技术在智能家居领域发挥了重要作用。
通过智能传感器的应用,我们可以实现家居设备的自动化控制和智能化管理。
例如,通过人体红外传感器可以实现室内灯光的自动开关,当有人进入房间时灯光自动打开,人离开后自动关闭,既方便了居民的生活,又节省了能源。
通过温湿度传感器可以实现智能空调的控制,根据室内温湿度的变化自动调节空调的工作模式和风速,提高了居住舒适度。
智能家居的发展将极大地改善我们的生活品质,提高家居的安全性和舒适度。
现代传感技术在医疗健康方面也发挥了重要作用。
通过生物传感器的应用,我们可以实时监测人体的生理参数,如心率、血压、血氧饱和度等。
这对于疾病的早期诊断和治疗具有重要意义。
例如,心率传感器可以实时监测心脏的跳动情况,及时发现心律失常等心脏疾病。
血压传感器可以实时监测血压的变化,帮助高血压患者控制血压。
通过生物传感技术,我们可以更好地了解自身的健康状况,及时采取相应的措施保护自己的身体健康。
现代传感技术还在工业生产、交通运输、农业等领域发挥了重要作用。
例如,在工业自动化领域,通过各种传感器的应用,可以实现设备的远程监控和故障预警,提高生产效率和安全性。
在交通运输领域,通过车载传感器的应用,可以实时监测车辆的状态和路况,提供实时导航和交通信息,提高交通流畅度和安全性。
现代传感技术与系统课后答案第1章绪论1.传感器的基本概念是什么?一般情况下由哪几部分组成?国家标准(GB7665-87)传感器的定义:能够感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置,通常由敏感元件和转换元件组成。
2.传感器有几种分类形式,各种分类之间有什么不同?共有10种分类形式。
根据传感器的工作机理:基于物理效应、基于化学效应、基于生物效应;传感器的构成原理:结构型与物性型;能量转换情况:能量转换型和能量控制型;根据传感器的工作原理分类:可分为电容式、电感式、电磁式、压电式、热电式、气电式、应变式等;根据传感器使用的敏感材料分类:可分为半导体传感器、光纤传感器、陶瓷传感器、高分子材料传感器、复合材料传感器等;根据传感器输出信号为模拟信号或数字信号:可分为模拟量传感器和数字量(开关量)传感器;根据传感器使用电源与否:可分为有源传感器和无源传感器;根据传感器与被测对象的空间关系:可分为接触式传感器和非接触式传感器;根据与某种高新技术结合而得名的传感器:如集成传感器、智能传感器、机器人传感器、仿生传感器等;根据输入信息分类:可分为位移、速度、加速度、流速、力、压力、振动、温度、湿度、粘度、浓度等。
3.举例说明结构型传感器与物性型传感器的区别。
结构型:利用物理学中场的定律构成的,特点是其工作原理是以传感器中元件相对位置变化引起场的变化为基础,而不是以材料特性变化为基础。
其基本特征是以其结构的部分变化或变化后引起场的变化来反映被测量(力、位移等)的变化。
如电容传感器利用静电场定律研制的结构型传感器。
物性型:利用物质定律构成的,如虎克定律、欧姆定律等。
物质定律是表示物质某种客观性质的法则。
这种法则,大多数是以物质本身的常数形式给出。
这些常数的大小,决定了传感器的主要性能。
因此,物性型传感器的性能随材料的不同而异。
如,光电管利用了外光电效应,压敏传感器是利用半导体的压阻效应。
4.传感器与传感技术概念有什么不同?答:传感器是获取信息的工具。
传感技术的应用
传感技术是现代科技的重要组成部分,它在许多领域都有广泛的应用。
以下是一些传感技术的应用领域:
1. 工业自动化:在工业自动化领域,传感技术被广泛应用于生产线上,如机器人的动作、温度、压力和物位测量等。
这些传感器可以监测生产过程中的各种参数,如温度、压力、流量和物位等,从而帮助实现精确控制,提高生产效率和产品质量。
2. 智能家居:在智能家居领域,传感技术也发挥了重要作用。
例如,烟雾探测器、温度传感器、门窗传感器等可以监测家庭环境中的各种变化,及时发出警报并采取相应措施,提高家庭生活的安全性和舒适性。
3. 医疗健康:在医疗健康领域,传感技术也发挥了重要作用。
例如,心电图传感器、血糖传感器等可以监测人体的生理参数,为医生提供准确的数据,帮助医生更好地诊断和治疗疾病。
4. 环境保护:在环境保护领域,传感技术可以监测空气质量、水质、噪声等环境参数,为环境保护提供科学依据。
例如,空气质量传感器可以监测空气中的污染物浓度,为治理污染提供数据支持。
5. 智能交通:在智能交通领域,传感技术可以帮助实现交通的智能化和自动化。
例如,雷达传感器、激光雷达等可以监测车辆的行驶情况,为自动驾驶和智能交通控制系统提供准确的数据支持。
总之,传感技术的应用领域非常广泛,它已经成为现代社会不可或缺的一部分。
随着科技的不断发展,传感技术的应用前景也将更加广阔。
现代传感技术课程设计一、教学目标通过本章的学习,学生将掌握现代传感技术的基本概念、原理和应用,包括各种传感器的特点、工作原理和测量方法。
学生能够理解传感器的信号处理和数据分析,掌握传感器的选型、安装和调试方法。
此外,学生还将培养动手实践能力和团队合作精神,能够运用传感器解决实际问题。
二、教学内容本章的教学内容主要包括传感器的分类、工作原理、特性及应用。
首先介绍传感器的定义和作用,然后讲解各种传感器的原理和特点,如温度传感器、压力传感器、光传感器等。
接着分析传感器的信号处理和数据分析方法,包括信号调理、滤波、线性化和校准等。
最后,结合实际案例,介绍传感器的应用领域和解决方案。
三、教学方法为了提高学生的学习兴趣和主动性,本章将采用多种教学方法。
首先,通过讲授法,为学生提供传感器的基本概念和理论知识。
其次,利用讨论法,引导学生探讨传感器的实际应用和解决方案。
再次,通过案例分析法,分析具体的传感器应用案例,让学生深入了解传感器的原理和应用。
最后,运用实验法,学生进行传感器实验,锻炼学生的动手实践能力。
四、教学资源为了支持教学内容和教学方法的实施,本章将选择和准备以下教学资源:教材《现代传感技术》、参考书《传感器原理与应用》、多媒体资料(包括PPT、视频等)、实验设备(如各种传感器、信号调理器、数据采集器等)。
这些教学资源将丰富学生的学习体验,帮助学生更好地理解和掌握传感器技术。
五、教学评估本章的教学评估将采用多元化的评估方式,以全面、客观地评价学生的学习成果。
评估主要包括以下几个方面:1.平时表现:通过观察学生在课堂上的参与程度、提问回答和小组讨论的表现,评估学生的学习态度和理解能力。
2.作业:布置相关的传感器实验报告和课后习题,评估学生对知识点的掌握和应用能力。
3.考试:安排一次章节测试,涵盖本章的核心知识点和技能,以评估学生的综合运用能力。
评估方式将保持公正、客观,及时给予学生反馈,帮助他们了解自己的学习进展,激发学生的学习动力。
2010年春季学期研究生课程考试试题Q1 填空题(共10分,每空1分)a)现代信息技术的三大支柱是传感技术、通讯技术和计算机技术,它们分别构成信息系统的“( ①感觉器官)”、“神经”和“(大脑②)”。
b)往往一种量值在传感或检测技术上的突破,会带来对另外一种量值的突破。
例如,约瑟夫森效应器件的出现,不仅解决了对于10-13T超弱(磁场③)的检测,同时还解决了对微弱(电压④)量的检测。
c)汽车气囊安全系统的启动,应该依据汽车安装的(压力⑤)和(加速度⑥)等传感器输出的信号值。
d)传感技术的发展主要体现在以下几个方面,如集成化智能化、无线化(网络⑦)化、微机械微(电子⑧)化。
e)传感器结构设计采用反馈形式,可以使传感器的延迟时间常数(变小⑨);采用双敏感元件差动方式,不仅可以改善传感器的非线性问题,还可以抑制例如(温度⑩)等变量参数的干扰。
Q2 简答题(共10分,每小题2分)a)如果使用霍尔传感器测量小电流,请简述原理或给出测量示意图。
是霍尔元件在聚集磁路中检测到与原边电流成比例关系的磁通量后输出霍尔电压信号,经放大电路放大后输送到仪表显示或计算机采集来直观反映电流的大小。
b)比较说明热电阻和热敏电阻的测温特点。
热电阻是金属材料,热敏电阻是半导体材料。
热电阻比热敏电阻测温范围大(如铂热电阻-200~960℃,热敏电阻只有-50~300℃左右)。
热电阻线性好,热敏电阻非线性严重,且热敏电阻互换性较差。
热电阻比热敏电阻灵敏度低。
(因热电阻温度系数较小,<1%/℃;热敏电阻-2%/℃至-6%/℃)。
热电阻都是正温度系数(即阻值随温度的上升而上升),而热敏电阻分为负温度系数和正温度系数两种。
c) 无线传感器网络的核心技术问题有哪些?答:关键技术:拓扑控制、网络协议、网络安全、时间同步、定位技术、数据融合、数据管理、无线通信技术、嵌入式系统、应用层技术。
核心问题:能源、传感器、封装、部署、资源受限下的网络机制、大规模下的网络机制d) 功能型光纤传感器可以测量哪些物理量?(举3例即可)答:陀螺、声、磁、压力、温度、液面、e) 在传感器静态特性数据分析中,插值和回归的目的分别是什么?答:插值的目的在于减少或增大信息量。
回归的目的在于获得线性度Q3(10分)当前,有一种被称为压缩传感(compress sensing )的技术成为研究热点,它主要针对数字图像和视频等信号获取时、根据Shannon 采样定理而出现的海量测量采样数据问题。
其核心思想是采样前将被测信号X 通过映射到不同域ψ 而得到新数据S ,且X =ψ S 。
由于S 是相对稀疏的(sparse ,指向量S 中只有有限元素的数值较大,其余可忽略为0),因而可以降低采样频率来观测。
实用中,还要设计测量矩阵Φ(其元素可选择为相互独立的高斯随机变量),最终可以由Y 重构X 。
其中的数据变换可由以下公式描述:a) 若被测信号X ∈R N ,Y ∈R M ,请分别指出公式中各矩阵算子或向量可能的维数;答:X=N*1,Y=M*1,Φ=M*N ,S=M*1,ψ=N*M ,Θ=M*Mb) M 和N 的关系是:M <<N 还是M>>N ?答:M<<Nc) 如图为该技术在图像获取方面的一个应用实例,其中,DMD 为Digital Mirror Device ,含有数量为N 的Micro-mirror ,用来反射(通过透镜)被测图像的像素于photodiode 上。
RNG 为Random Number Generator ,随机选择DMD 的N 个微反射镜面中某一个与检测器photodiode 接通。
请简要分析该实例应用压缩传感技术的工作原理。
(限150字内)ΘS ΦΨS ΦXY ===Q4(10分)一个一阶系统的系统函数,可由下式描述: sK s H τ+=1)( 式中,K 为增益,τ为时间延迟常数。
该系统对单位阶跃u (t )的零状态响应y (t )为()τ/1)()(t e t Ku t y --= 该系统对斜坡函数⎩⎨⎧≥<=0 ,0 ,0)(t mt t t slope (m 为常实数)的状态响应y (t )为 ()τττ-+=-t e Km t y t /)(a) 试给出一个一阶零状态测量系统当被测量分别为单位阶跃u (t )和斜坡函数slope (t )时的测量误差(包含暂态和稳态误差)答:(1)当被测量为单位阶跃u (t )时,测量暂态误差e d =K u (t )-K u (t )(1-e-t/τ)=K u (t ) e -t/τ 测量稳态误差e s =对e d 取极限值=0,t 取 ∞。
(2)当被测量为斜坡函数slope (t )时测量暂态误差e d =K mt-K m u(τe-t/τ+t-τ)=Km τ-K m τe -t/τ 测量暂态误差e s =对e d 取极限值= Km τ,t 取∞。
b) 一个一阶压力传感器必须满足下列动态响应的要求:1) 在阶跃输入后,在0.05s 时刻至少保持95%的精度;2) 对于200.0psi/s 的斜坡输入稳态误差不超过2psi 。
求出这种传感器的最大允许时间常数τ答:(1) t=0.05s,e|d|= K u(t) e-0.05/τ/ K u(t)= e-0.05/τ≤5%τ=0.017s(2) e s=2psiKmτ=2psi,Km=200.0psi/sτ=0.01sc)一个无外壳的温度传感器(一阶动态响应)用于测量起伏达100Hz的湍流。
若动态误差要维持小于5%,试问传感器的时间常数应多大?答:t=0.005se|d|= K u(t) e-0.005/τ/ K u(t)= e-0.005/τ≤5%τ=0.0017sQ5(10分)利用薄膜Pt100传感器(Minco公司S245PD),以0.1︒C的分辨率测量20 ︒C ~100 ︒C范围的水流温度。
薄膜Pt100在0︒C时电阻为100Ω,α=0.00385/K,在流速为0.4m/s的水流中热损耗系数δ=40mW/K。
a)若V r=5V,试计算R r取值范围;b)若进一步要求传感器测温系统的灵敏度为1mV/ C, 则R r=?其他计算题:(一)其他计算题(二)其他计算题(三)Q6 (10分)以下为某杂志发布的信息,阅读后请回答:a)描述“传感器”一词,英文文献中主要有哪些词汇?(列举2-3个);Sensor 、Transducer 、Inductorb)MEMS的中文含义是什么?它主要需要哪些学科的技术交叉?MEMS是微机电系统(Micro-Electro-Mechanical Systems)的英文缩写。
MEMS是美国的叫法,在日本被称为微机械,在欧洲被称为微系统,它是指可批量制作的,集微型机构、微型传感器、微型执行器以及信号处理和控制电路、直至接口、通信和电源等于一体的微型器件或系统。
与自然与工程学科的微米/纳米技术、电子集成技术、刻蚀工艺、封装技术、新材料技术等技术交叉c)RFID的中文含义是什么?请介绍其一种应用场合;答:RFID(Radio Frequency Identification)译为无线射频技术或者射频识别技术。
是一种非接触式的自动识别技术,它通过射频信号自动识别目标对象并获取相关的数据信息。
它利用射频方式进行非接触双向通信,来达到识别目的并交换数据。
RFID的识别工作不需要人工的干预,可工作于各种恶劣环境。
RFID技术可识别高速运动物体并可同时识别多个标签,操作快捷方便。
在制造业,RFID能帮助企业1)开始逐步打通企业的物流链,实现生产制造和物流运输的全程跟踪;2)逐步从技术验证的阶段过渡到实施企业级的RFID应用;3)国际知名大企业如福特、丰田、宝马等纷纷在汽车生产线上使用RFID系统实现在制品跟踪和生产状态监控。
d)研发一种新型传感器,除了“Design”,还有哪些主要过程?请用英文描述。
Fabrication and Characterization制作和特性表述e)围绕测量、仪器和传感器,你还知道有哪些权威国际期刊?(列举2个即可)Sensors and Transducers Journal、SCI、IEEE、IEEJNew issue of Sensors and Transducers Journal (ISSN 1726-5479), Vol. 115, Issue 4, April 2010 is online (/HTML/DIGEST/New_Digest.htm):1) Role of MEMS in Biomedical Application: A Review, by Himani Sharma, P. A. Alvi, S. Dalela and J. Akhtar, pp.1-10:2) Novel Pressure Sensor for Aerospace Purposes, by T. Beutel, M. Leester-Schadel, P. Wierach, M. Sinapius and S. Buttgenbach, pp.11-193) Design and Implementation of an Embedded Digital Throwing System Based on MEMS Multiaxial Accelerometer, by Zhen Gao and Dan Zhang, pp.20-28:4) On the Modeling of a MEMS Based Capacitive Accelerometer for Measurement of Tractor Seat Vibration, by M. Alidoost, G. Rezazadeh, M. Hadad-Derafshi, pp.29-42:5) Optimization of Contact Force and Pull-in V oltage for Series based MEMS Switch, by Abhijeet Kshirsagar, S. P. Duttagupta, S. A. Gangal, pp.43-47:6) Fully on-chip High Q Inductors based on Microtechnologies, by Kriyang Shah, Nazuhusna Khalid,Jugdutt Singh, Hai P. Le, John Devlin and Zaliman Sauli, pp.48-60:7) A Combined Thermo-Electrostatic MEMS-Based Switch with Low Actuation Voltage, by Parisa Mahmoudi, Habib Badri Ghavifekr, Esmail Najafiaghdam, pp.61-70:8) Output Force Enhancement of Scratch Drive Actuator in Low-Voltage Region by Using Flexible Joint, by Shawn Chen, Chiawei Chang and Wensyang Hsu, pp.71-82:9) Electroplated Nickel Micromirror Array, by Mahmoud Almasri and Albert B. Frazier, pp. 83-91:10)Pull-In Phenomenon Investigation in Nonlinear Electromechanical Coupled System by Distributed Model Frequency Analysis Method, by Ahmadali Tahmasebi-Moradi, Fatemeh Abdolkarimzadeh and Ghader Rezazadeh, pp. 92-10711)Generic Compact Model of Double-Gate MOSFETs Applicable to Different Operation Modes and Channels, by Xingye Zhou, Jian Zhang, Lining Zhang, Chenyue Ma, Xing Zhang, Jin He and Mansun Chan, pp. 108-11512)The Design, Fabrication and Characterization of Nematic Liquid Crystals based Chemical and Biological Sensors with Electroplated Microstructures, by Jun Namkung and Robert G. Lindquist, pp.116-12313)Analytic Calculation of Forces and Torques on a Silicon Die under Fluidic Self-alignment, by R. C. Woods, pp.124-13414)Silicon Die Self-alignment on a Wafer: Stable and Unstable Modes, by Jean Berthier, Kenneth Brakke, Francois Grossi, Loic Sanchez, Lea DI Cioccio, pp.135-15015)A Method to Improve the SGADER Process and Fabricate Ultra-thick Proof Mass Inertial Sensors under the Same DRIE Technique, by Haifeng Dong, Jianli Li, pp.151-15916)Design of Novel Paper-based Inkjet Printed Rounded Corner Bowtie Antenna for RFID Applications, by Yasar Amin, Julius Hallstedt, Hannu Tenhunen, Li-Rong Zheng, pp.160-167。