PLC课程设计报告
- 格式:doc
- 大小:14.51 MB
- 文档页数:17
plc 课程设计一、课程目标知识目标:1. 理解PLC(可编程逻辑控制器)的基本原理和结构,掌握其功能与应用领域;2. 学会使用PLC编程软件进行基本的程序编写、调试和故障排查;3. 了解PLC在工业自动化控制系统中的应用案例,理解其重要作用。
技能目标:1. 能够独立操作PLC编程软件,完成基础程序的设计与调试;2. 培养学生运用PLC技术解决实际问题的能力,提高创新意识和动手实践能力;3. 培养学生团队协作和沟通表达的能力,提高解决实际问题的效率。
情感态度价值观目标:1. 培养学生对PLC技术及其在工业自动化中应用的兴趣,激发学习热情;2. 增强学生对我国工业自动化发展的自豪感,培养爱国主义情怀;3. 培养学生严谨、细致、负责的学习态度,提高职业素养。
课程性质:本课程为专业技术课程,旨在培养学生掌握PLC技术的基本知识和应用能力。
学生特点:学生处于高年级阶段,具备一定的电气基础和编程能力,对实际操作和动手实践有较高兴趣。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,提高学生的实际操作能力和解决实际问题的能力。
通过课程学习,使学生达到上述具体的学习成果。
二、教学内容1. PLC基本原理与结构- PLC的定义、发展历程和分类- PLC的硬件组成与工作原理- PLC的软件系统及其功能2. PLC编程软件操作- PLC编程软件的安装与使用方法- 基本指令的学习与应用- 程序的编写、下载、调试与监控3. PLC应用案例与实践- PLC在工业自动化控制系统中的应用案例分析- PLC控制系统的设计步骤与方法- 实践操作:基础程序设计与调试4. PLC故障排查与维护- PLC常见故障及其原因- 故障排查方法与步骤- PLC的日常维护与保养教学大纲:第一周:PLC基本原理与结构学习,熟悉PLC的硬件组成与工作原理;第二周:PLC编程软件操作,学习基本指令,进行简单程序编写与调试;第三周:PLC应用案例分析与实践,设计并调试基础控制程序;第四周:PLC故障排查与维护,掌握常见故障排查方法,了解日常维护与保养知识。
课程设计(报告)设计(报告)题目:液体混合装置的PLC控制系统设计学生姓名:指导教师:高峰二级学院:专业:电气工程及其自动化班级:学号:目录摘要 01 绪论 (1)1.2.1可编程控制器多种液体自动混合控制系统的特点……………………‥11.2.2 本系统采用PLC是基于以下两个原因: (1)2 系统总体方案设计 (2)2.1 实验目的 (2)2.2 实验设备 (2)2.3 PLC的系统选型 (2)2.4 液体自动混合系统的控制要求 (3)3 液体混合装置的控制的软件设计 (4)3.1 液体混合程序流程图 (4)3.2 两种液体混合装置的输入/输出分配 (5)3.2.1控制系统的I/O点分配 (5)3.2.2 PLC的I/O接线图 (5)3.3液体混合装置的结构示意图 (5)3.4程序设计梯形图 (6)3.4.1程序图 (6)3.4.2过程叙述分析 (9)4系统调试及结果分析 (9)4.1系统调试 (9)4.2 结果分析........................................................................‥•10 5系统常见故障分析及维护 (10)5.1PLC的I\O端口系统故障分析及处理..........................................‥10 5.2PLC主机系统内部故障分析及处理 (10)6结论 (11)7参考文献 (11)液体混合装置的PLC控制系统设计摘要可编程控制器简称PLC,是近年来一种发展极为迅速。
应用极为广泛的工作控制装置。
它是一种专为工业环境应用而设计的数字运行的电子系统,它采用可编程的存储器,用来存储用户指令,通过数字或模拟的输入/输出完成确定的逻辑顺序、定时、记数、运算和一些确定的功能来控制各种类型的机械或生产过程。
由于PLC的性能优越,兼具计算机的功能完备,灵活性强,通用性好喝继电接触器控制简单易懂,维修方便等优点,形成以微电脑为核心的电子控制设备。
可编程控制器原理与实践课程设计实验报告姓名:杨益伟班级:自动化1202学号:120900321指导教师:张义红2014年11月东华大学信息科学与技术学院目录一、PLC课程设计目的及要求----------------------3二、PLC的技术特点及应用------------------------3三、课程设计内容--------------------------------53.1智能抢答器系统-----------------------------53.1.1控制要求3.1.2I/O编址,梯形图及运行过程分析3.1.3PLC硬件连接图3.1.4总结与体会3.2自动交通灯系统----------------------------93.2.1控制要求3.2.2I/O编址,梯形图及运行过程分析3.2.3PLC硬件连接图3.2.4总结与体会3.3小球分拣器系统----------------------------153.3.1控制要求3.3.2I/O编址,梯形图及运行过程分析3.3.3PLC硬件连接图3.3.4总结与体会3.4电梯模型----------------------------------193.4.1控制要求3.4.2I/O编址,梯形图及运行过程分析3.4.3PLC硬件连接图3.4.4总结与体会一、PLC课程设计目的及要求课程设计目的:(1)通过对实际的PLC控制系统的编程训练,提高分析问题、解决问题的能力;(2)熟悉工业生产中PLC的应用和系统构成,了解PLC控制的电路的设计方法。
(3)通过本次课程设计增进实际动手能力的培养。
(4)用PLC实现工件加工模型,四层电梯模型的运动控制和模拟系统的程序设计,掌握编程的一般方法和技巧。
课程设计要求:(1)理解实际系统的运动过程,分解动作过程使之容易编程。
(2)列写PLC控制系统的I/O配置。
(3)画出硬件电路图,实现PLC与控制装置的连线。
plc课程设计报告led灯一、课程目标知识目标:1. 学生能理解PLC(可编程逻辑控制器)的基本原理和结构,掌握LED灯的控制方法。
2. 学生能够运用所学知识,设计并实现一个简单的PLC控制LED灯的程序。
3. 学生能够解释并分析PLC控制LED灯的工作原理,理解I/O接口的功能和操作。
技能目标:1. 学生能够独立进行PLC编程,通过编写程序实现LED灯的点亮、熄灭和闪烁等基本控制功能。
2. 学生能够运用问题解决策略,调试和优化PLC控制程序,解决实际问题。
3. 学生能够运用团队合作和沟通技巧,共同完成PLC控制LED灯的设计和实现。
情感态度价值观目标:1. 学生培养对PLC技术及其应用的兴趣,激发创新意识和探索精神。
2. 学生培养工程思维,认识到技术对生活的影响,增强社会责任感和环保意识。
3. 学生在团队协作中培养合作精神,学会尊重他人,提高人际沟通和解决问题的能力。
课程性质:本课程为实践性较强的学科,结合理论知识与动手操作,培养学生实际应用能力。
学生特点:考虑到学生所在年级,已具备一定的电子基础和编程知识,具备初步的问题解决能力。
教学要求:教师应注重理论与实践相结合,引导学生主动探究,鼓励学生动手实践,培养其创新思维和解决问题的能力。
在教学过程中,关注学生的学习进度,及时调整教学策略,确保课程目标的实现。
通过分解课程目标为具体学习成果,为教学设计和评估提供依据。
二、教学内容本课程教学内容围绕PLC基础知识、LED灯控制原理及编程实践展开。
具体安排如下:1. PLC基础知识:- PLC的定义、功能及应用场景- PLC的基本结构及工作原理- I/O接口的类型及功能2. LED灯控制原理:- LED灯的电路原理及特性- PLC控制LED灯的方法及步骤- 常见LED灯控制电路的分析3. 编程实践:- PLC编程软件的使用方法- Ladder Diagram(梯形图)的编写规则- 设计并实现LED灯的点亮、熄灭和闪烁程序- 调试和优化程序,解决实际问题教学大纲:第一课时:PLC基础知识及LED灯电路原理第二课时:PLC控制LED灯的方法及步骤第三课时:编程软件的使用及Ladder Diagram编写规则第四课时:设计并实现LED灯控制程序第五课时:程序调试、优化及问题解决教学内容与教材关联性:本课程教学内容与教材中关于PLC控制技术、LED灯应用的相关章节紧密相连,确保学生所学知识的科学性和系统性。
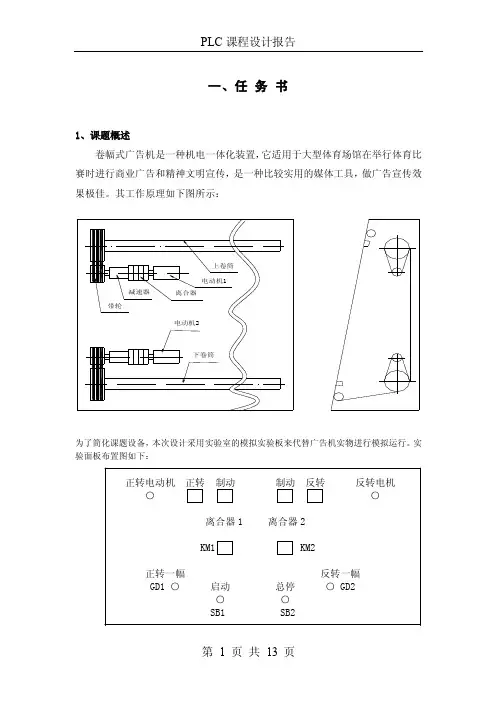
一、任务书1、课题概述卷幅式广告机是一种机电一体化装置,它适用于大型体育场馆在举行体育比赛时进行商业广告和精神文明宣传,是一种比较实用的媒体工具,做广告宣传效果极佳。
其工作原理如下图所示:为了简化课题设备,本次设计采用实验室的模拟实验板来代替广告机实物进行模拟运行。
实验面板布置图如下:2、控制要求⑴接通电源后,按下启动按钮SB1,正卷电动机开始运行,经30S延时电动机达额定转速,离合器1线圈由接触器KM1接通,使上卷筒作顺时针转动。
⑵当某一幅画面接近指定位置时,光电传感器GD1发出正转一幅到位信号,使反转接触器KMB1动作,制度时间约5S,画面准确停留指定位置。
⑶每幅画面在指定位置停留3分钟以展开广告内容,然后控制系统应能自动启动电动机仍按顺时针方向转动,继续上述过程,实现画面切换。
⑷直到画面切换8次后,第9幅画面停留在指定位置5分钟。
此时自动切断电动机电源,并自动驱动反卷电动机工作,反卷过程与正卷过程相同。
如此周而复始重复上述过程。
⑸如果按下总停按钮SB2或停电,系统应能记忆当时的运行状态,保证在重新按下电动按钮时,能接续原来的状态运行3、课题设计内容及要求⑴内容:① PLC空制器的选型,正确配置系统硬件。
②写出I/O地址,并生成符号地址表。
③用梯形图方式正确编程。
④正确连接PLC与模拟实验板,检查无误后运行并调试程序。
⑤写出完整的课题设计报告。
⑵要求:①梯形图程序正确无误。
②调试时无安全事故。
③设计报告采用A4格式打印。
二、主要内容1、课题调查⑴、卷幅式广告机控制面板简图如下⑵、控制要求①、按下启动按钮SB1后,正卷电动机开始转动,30秒后正卷离合器线圈得电,合上离合器,带动画面转动。
②、当光电传感器检测到第一幅画面已到达指定位置时,启动反接制动装置,5秒后使画面准确停在指定位置。
③、画面在指定位置停留3分钟,然后重复上述过程,实现画面切换。
④、当切换到第9幅画面时,画面到达指定位置后,停留5分钟,随后正卷电动机电源被切断,启动反卷电动机,反卷过程与正卷过程相同。
plc课程设计总结6篇plc课程设计总结plc课程设计总结(一):和学别的学科一样,在学完plc理论课程后我们做了课程设计,此次设计以分组的方式进行,每组有一个题目。
我们做的是机械手臂的plc控制系统。
由于平时大家都是学理论,没有过实际开发设计的经验,拿到的时候都不明白怎样做。
但透过各方面的查资料并学习。
我们基本学会了plc设计的步聚和基本方法。
分组工作的方式给了我与同学合作的机会,提高了与人合作的意识与潜力。
透过这次设计实践。
我学会了plc的基本编程方法,对plc的工作原理和使用方法也有了更深刻的理解。
在对理论的运用中,提高了我们的工程素质,在没有做实践设计以前,我们对明白的撑握都是思想上的,对一些细节不加重视,当我们把自己想出来的程序与到plc中的时候,问题出现了,不是不能运行,就是运行的结果和要求的结果不相贴合。
能过解决一个个在调试中出现的问题,我们对plc的理解得到加强,看到了实践与理论的差距。
透过合作,我们的合作意识得到加强。
合作潜力得到提高。
上大学后,很多同学都没有过深入的交流,在设计的过程中,我们用了分工与合作的方式,每个人互责必须的部分,同时在必须的阶段共同讨论,以解决分工中个人不能解决的问题,在交流中大家用心发言,和提出意见,同时我们还向别的同学请教。
在此过程中,每个人都想自己的方案得到实现,用心向同学说明自己的想法。
能过比较选出最好的方案。
在这过程也提高了我们的表过潜力。
透过此次课设,让我了解了plc梯形图、指令表、顺序功能图有了更好的了解,也让我了解了关于plc设计原理。
有很多设计理念于实际,从中找出最适合的设计方法。
虽然本次课程设计是要求自己独立完成,但是,彼此还是脱离不了群众的力量,遇到问题和同学互相讨论交流。
多和同学讨论。
我们在做课程设计的过程中要不停的讨论问题,这样,我们能够尽可能的统一思想,这样就不会使自己在做的过程中没有方向,并且这样也是为了方便最后设计和在一齐。
现成的plc课程设计一、课程目标知识目标:1. 让学生掌握PLC(可编程逻辑控制器)的基本原理与结构,理解其在工业自动化领域的应用。
2. 使学生了解PLC编程语言,学会使用PLC进行基本的逻辑控制程序编写。
3. 让学生掌握PLC的输入输出接口特性,了解常见的传感器与执行器的使用。
技能目标:1. 培养学生运用PLC进行实际控制系统设计的能力,能独立完成简单的控制程序编写。
2. 提高学生动手操作能力,学会使用PLC编程软件进行程序的输入、调试与修改。
3. 培养学生分析问题、解决问题的能力,使其在遇到实际控制问题时,能够运用所学知识进行有效解决。
情感态度价值观目标:1. 培养学生对自动化技术及PLC控制技术的兴趣,激发其探索精神与创新意识。
2. 增强学生的团队合作意识,使其在课程学习过程中学会与他人沟通、协作。
3. 通过课程学习,使学生认识到PLC在工业生产中的重要作用,增强其学以致用的意识,为未来从事相关工作打下基础。
课程性质:本课程为实践性较强的学科,注重理论联系实际,强调学生动手能力的培养。
学生特点:学生具备一定的电子、电气基础知识,对PLC有一定了解,但实际操作经验不足。
教学要求:结合学生特点,课程设计应注重理论与实践相结合,以实际操作为主,引导学生主动探究,提高其分析问题和解决问题的能力。
在教学过程中,注重培养学生的学习兴趣,使其在学习中形成良好的情感态度价值观。
通过课程目标的分解与实现,使学生在知识、技能和情感态度价值观方面取得具体的学习成果。
二、教学内容1. PLC基本原理与结构:介绍PLC的发展历程、组成结构、工作原理,使学生了解PLC的基础知识,为后续学习打下基础。
(对应教材第一章)2. PLC编程语言:讲解PLC的编程语言,包括指令表、梯形图、功能块图等,使学生掌握PLC编程的基本方法。
(对应教材第二章)3. PLC输入输出接口:介绍PLC的输入输出接口特性,讲解常见的传感器与执行器的工作原理及使用方法,提高学生在实际应用中选用合适设备的能力。
本科plc课程设计一、教学目标本课程的教学目标是使学生掌握PLC的基本原理、编程方法和应用技巧。
具体包括:1.知识目标:学生能够理解PLC的基本组成、工作原理和分类;掌握PLC编程语言和指令系统;了解PLC在工业自动化中的应用。
2.技能目标:学生能够使用PLC进行简单的逻辑控制和程序设计;能够对PLC进行硬件接线和调试;能够分析PLC控制系统的设计和优化。
3.情感态度价值观目标:培养学生对PLC技术的兴趣和好奇心,提高学生对自动化技术的认识和重视,培养学生团队合作和解决问题的能力。
二、教学内容根据课程目标,教学内容主要包括以下几个部分:1.PLC基本原理:介绍PLC的定义、发展历程、基本组成和工作原理。
2.PLC编程方法:讲解PLC编程语言、指令系统、程序结构和编程技巧。
3.PLC应用案例:分析PLC在工业自动化中的典型应用,如生产线控制、机床控制等。
4.PLC控制系统设计:讲解PLC控制系统的设计方法、步骤和注意事项。
5.PLC编程实践:安排实验室实践环节,让学生动手编写程序和调试PLC。
三、教学方法为了实现课程目标,我们将采用以下教学方法:1.讲授法:讲解PLC基本原理、编程方法和应用案例。
2.讨论法:学生分组讨论PLC控制系统设计问题和应用场景。
3.案例分析法:分析典型PLC应用案例,让学生了解PLC在实际工程中的应用。
4.实验法:安排实验室实践环节,让学生动手操作PLC,提高实际操作能力。
四、教学资源为了支持课程教学,我们将准备以下教学资源:1.教材:选用权威、实用的PLC教材,为学生提供系统、全面的知识体系。
2.参考书:推荐学生阅读相关参考书籍,拓展知识面。
3.多媒体资料:制作课件、教学视频等多媒体资料,提高课堂教学效果。
4.实验设备:配置PLC实验装置,让学生能够进行实际操作和调试。
五、教学评估本课程的评估方式包括平时表现、作业和考试三个方面,以保证评估的客观性和公正性。
1.平时表现:通过课堂参与、提问和小组讨论等方式,评估学生在课堂上的积极性和主动性。
PLC课程设计报告一、选题目的和意义:随着生产力和科学技术的不断发展,人们的日常生活和生产活动大量的使用自动化控制,不仅节约了人力资源,而且很大程度的提高了生产效率,又进一步的促进了生产力快速发展,并不断的丰富着人们的生活。
早期的自动控制系统是依靠继电-接触器来实现的,其特点是:结构简单、价格低廉、抗干扰能力强,可以实现集中控制和远距离控制,但是其采用固定接线,通用性和灵活性差;又采用触点的开关动作,工作频率低,触点易损坏,可靠性差。
1969年,出现了可编程逻辑控制器PLC(Programmable Logic Controller),其特点是:具备逻辑控制、定时、计数等功能,编程语言采用直观的梯形图语言,软件更改方便,通用性和灵活性好。
目前,可编程控制器PLC主要是朝着小型化、廉价化、标准化、高速化、智能化、大容量化、网络化的方向发展,与计算机技术相结合,形成工业控制机系统、分布式控制系统DCS(Distributed Control System)、现场总线控制系统FCS(Field bus Control System),这将使PLC的功能更强,可靠性更高,使用更方便,适用范围更广。
随着汽车特别是私有汽车的普及使用,公共场所和社区汽车流转数量激增,这对车辆的安全停放和管理提出了更高的要求,引进先进的控制技术和管理方式,实现对大型停车场系统的集中化和智能化的安全性管理控制已经成为大规模停车服务管理的必然趋势。
针对现有的停车系统管理中存在的缺陷及PLC技术和传感器技术的迅猛发展所带来的新控制方式和管理方式的变革,采用先进的、科学的、合理的设计方法,建立一套基于PLC的车辆出入库管理系统最大限度地提高了停车场的使用率,实现车辆出入库控制、数量统计、信息查询过程的自动化,就显得十分必要。
本次课程设计就是设计这样一种计数车辆出入库的产品,来实现车辆出入的智能显示和管理。
学生姓名任务分工学生姓名任务分工学生姓名任务分工编程编程调试、查阅资料调试、填写报告调试、查阅资料1二、主要研究内容:一、研究内容:编制一个用PLC控制的车辆出入库管理梯形图控制程序,控制要求如下:1.入库车辆前进时,经过1# → 2#传感器后计数器加1,后退时经过2# → 1#传感器后计数器减1,单经过一个传感器则计数器不动作。

长江大学工程技术学院柔性加工系统综合实训(2016-2017学年第1学期)学院机械工程学院专业班级机械61303班学生姓名***序号**指导教师肖雪/讲师,***/讲师完成时间2016年**月**日目录1实训目的与任务 ..................................... - 0 -2 实训要求........................................... - 0 -3 实训内容........................................... - 0 -交通灯的时间控制................................. - 0 -不同尺寸的部分分检............................... - 4 -钻孔............................................. - 15 -部件供给........................................ - 18 -输送带控制....................................... - 21 -自动门操作....................................... - 27 -舞台装置......................................... - 30 -部件分配......................................... - 37 -4 实验室实训内容.................................... - 45 -实训要求......................................... - 45 -系统结构组成..................................... - 46 -控制原理......................................... - 47 - I/O分配表 ...................................... - 48 -控制流程......................................... - 50 -控制程序......................................... - 51 -5心得体会 .......................................... - 60 -1实训目的与任务(1)学习仿真软件三菱PLC+FX-TRN-BEG-C完成仿真的一系列案例(2)通过MPS各单元的控制要求,实现各单元的动作。
plc课程设计总结17篇(经典版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的经典范文,如工作总结、工作计划、报告大全、心得体会、条据书信、合同协议、演讲稿、自我鉴定、其他范文等等,想了解不同范文格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor.I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, this shop provides you with various types of classic sample essays, such as work summary, work plan, report book, experience and experience, letter of agreement, contract agreement, speech draft, self-assessment, other sample essays, etc. I would like to know the different format And how to write, stay tuned!plc课程设计总结17篇下面是本店铺收集的plc课程设计总结17篇(PLC课程设计总结),供大家品鉴。
plc 课程设计总结一、教学目标本章节的教学目标分为三个维度:知识目标、技能目标和情感态度价值观目标。
1.知识目标:通过本章节的学习,学生需要掌握PLC(可编程逻辑控制器)的基本概念、工作原理和应用领域。
具体包括:了解PLC的历史发展、主要组成部分、工作原理和编程语言;掌握PLC的基本指令、功能指令及其应用;了解PLC在不同领域的应用案例。
2.技能目标:培养学生具备使用PLC进行简单控制系统设计的能力。
具体包括:学会使用PLC编程软件进行程序设计;能够分析PLC控制系统的要求,并设计出相应的控制程序;具备对PLC控制系统进行调试和维护的基本技能。
3.情感态度价值观目标:培养学生对PLC技术的兴趣和热情,提高他们对自动化技术的认识,培养创新精神和团队合作意识。
二、教学内容本章节的教学内容主要包括四个部分:PLC基本概念、PLC工作原理、PLC编程技术和PLC应用案例。
1.PLC基本概念:介绍PLC的定义、历史发展、主要组成部分和应用领域。
2.PLC工作原理:讲解PLC的工作原理,包括输入输出处理、程序执行过程、状态编程等。
3.PLC编程技术:详细介绍PLC的基本指令、功能指令及其应用,包括逻辑运算、定时器、计数器、数据传送等。
4.PLC应用案例:分析PLC在不同领域的应用案例,如工业自动化、楼宇自动化、交通控制等。
三、教学方法本章节的教学方法采用讲授法、讨论法、案例分析法和实验法相结合的方式进行。
1.讲授法:通过教师的讲解,让学生掌握PLC的基本概念、工作原理和编程技术。
2.讨论法:学生进行小组讨论,分享对PLC应用案例的理解和看法,培养团队合作意识。
3.案例分析法:分析具体的PLC应用案例,让学生学会将理论知识应用于实际问题中。
4.实验法:安排实验室实践环节,让学生动手操作PLC设备,加深对PLC编程和应用的理解。
四、教学资源本章节的教学资源包括教材、参考书、多媒体资料和实验设备。
1.教材:选用权威、实用的PLC教材,为学生提供系统的理论知识。
目录一、摘要 (3)二、概述 (4)2.1、PLC发展历史2.2、PLC的前景及未来三、课程设计的主要内容和要求 (5)3.1、课程设计的目的3.2、课程设计课题任务的内容和要求3.3、课程设计工作任务及工作量的要求四、PLC的选用及相关知识 (6)4.1、三菱PLC与西门子PLC的对比4.1、FX2N系列PLC的结构特点4.2、FX2N系列PLC工作原理4.3、FX2N系列PLC的功能与应用五、PLC礼花灯控制系统的设计 (10)5.1、PLC礼花灯控制系统设计思路和硬元件的选择5.2、PLC礼花灯控制系统IO分配表5.3、PLC礼花灯控制系统外部接线5.4、PLC礼花灯控制系统程序流程框图5.5、PLC礼花灯控制系统梯形图5.6、PLC礼花灯控制系统软件指令表5.7、PLC礼花灯控制系统仿真结果六、课程设计心得 (16)本课题是基于FX2N系列PLC为控制核心,通过对PLC控制系统的设计和编程,并与少量的外部开关电路相结合而实现的一种礼花灯控制系统,是一种较为新颖的基于PLC的礼花灯控制系统设计方案。
在本次课程设计中,我们利用了定时器(T)实现对礼花灯上各个LED灯的通断控制,让LED灯能够以特定的规律循环点亮。
该控制系统具有硬件使用率少,外部操作电路简单及易操作等特点。
关键词:FX2N可编程控制器,LED灯控制器,操作简单方便,循环控制2.1、PLC发展历史起源:1968年美国通用汽车公司提出取代继电器控制装置的要求。
1969 年,美国数字设备公司研制出了第一台可编程控制器 PDP—14 ,在美国通用汽车公司的生产线上试用成功,首次采用程序化的手段应用于电气控制,这是第一代可编程序控制器,称Programmable,是世界上公认的第一台PLC。
发展:20世纪70年代初出现了微处理器。
人们很快将其引入可编程控制器,使PLC增加了运算、数据传送及处理等功能,完成了真正具有计算机特征的工业控制装置。
plc快递分拣课程设计报告一、课程目标知识目标:1. 让学生掌握PLC(可编程逻辑控制器)的基础知识,理解其在快递分拣系统中的应用原理。
2. 学习并掌握快递分拣系统的基本构成、工作流程及其与PLC的交互关系。
3. 了解并掌握快递分拣过程中涉及的传感器类型及其功能。
技能目标:1. 培养学生运用PLC进行快递分拣程序编写的能力,能够实现基本的分拣控制逻辑。
2. 提高学生分析并解决快递分拣过程中实际问题的能力。
3. 培养学生团队协作能力,通过分组讨论、实践操作等形式,共同完成快递分拣系统的设计与调试。
情感态度价值观目标:1. 培养学生对自动化技术的兴趣和热情,提高其学习主动性和积极性。
2. 培养学生关注快递物流行业的发展,认识到自动化技术在其中的重要作用。
3. 培养学生具有良好的职业道德,尊重他人成果,诚实守信,勇于承担责任。
课程性质:本课程为实践性较强的课程,结合理论知识与实践操作,培养学生运用PLC进行快递分拣系统的设计与调试能力。
学生特点:学生具备一定的PLC基础知识,对实践操作感兴趣,喜欢探索新知识。
教学要求:教师需结合课程特点,以学生为主体,注重启发式教学,引导学生主动探究,培养其解决问题的能力。
同时,关注学生的个体差异,提供个性化的指导与帮助。
通过课程学习,使学生达到预定的学习成果,为后续教学设计和评估提供依据。
二、教学内容本课程教学内容主要包括以下几部分:1. PLC基础知识回顾:包括PLC的定义、分类、工作原理等,涉及教材第一章内容。
2. 快递分拣系统概述:介绍快递分拣系统的基本构成、工作流程及其在物流行业中的应用,涉及教材第二章内容。
3. PLC在快递分拣系统中的应用:学习PLC在快递分拣系统中的具体应用,如控制逻辑、程序编写等,涉及教材第三章内容。
4. 传感器及其在快递分拣系统中的应用:介绍快递分拣过程中涉及的传感器类型、原理及其功能,涉及教材第四章内容。
5. 实践操作:分组进行快递分拣系统的设计与调试,让学生将所学知识应用于实际操作中,提高其动手能力。
plc课程设计总结6篇plc课程设计总结plc课程设计总结(一):和学别的学科一样,在学完plc理论课程后我们做了课程设计,此次设计以分组的方式进行,每组有一个题目。
我们做的是机械手臂的plc控制系统。
由于平时大家都是学理论,没有过实际开发设计的经验,拿到的时候都不明白怎样做。
但透过各方面的查资料并学习。
我们基本学会了plc设计的步聚和基本方法。
分组工作的方式给了我与同学合作的机会,提高了与人合作的意识与潜力。
透过这次设计实践。
我学会了plc的基本编程方法,对plc的工作原理和使用方法也有了更深刻的理解。
在对理论的运用中,提高了我们的工程素质,在没有做实践设计以前,我们对明白的撑握都是思想上的,对一些细节不加重视,当我们把自己想出来的程序与到plc中的时候,问题出现了,不是不能运行,就是运行的结果和要求的结果不相贴合。
能过解决一个个在调试中出现的问题,我们对plc的理解得到加强,看到了实践与理论的差距。
透过合作,我们的合作意识得到加强。
合作潜力得到提高。
上大学后,很多同学都没有过深入的交流,在设计的过程中,我们用了分工与合作的方式,每个人互责必须的部分,同时在必须的阶段共同讨论,以解决分工中个人不能解决的问题,在交流中大家用心发言,和提出意见,同时我们还向别的同学请教。
在此过程中,每个人都想自己的方案得到实现,用心向同学说明自己的想法。
能过比较选出最好的方案。
在这过程也提高了我们的表过潜力。
透过此次课设,让我了解了plc梯形图、指令表、顺序功能图有了更好的了解,也让我了解了关于plc设计原理。
有很多设计理念于实际,从中找出最适合的设计方法。
虽然本次课程设计是要求自己独立完成,但是,彼此还是脱离不了群众的力量,遇到问题和同学互相讨论交流。
多和同学讨论。
我们在做课程设计的过程中要不停的讨论问题,这样,我们能够尽可能的统一思想,这样就不会使自己在做的过程中没有方向,并且这样也是为了方便最后设计和在一齐。
《可编程控制器技术》课程设计题目:交通信号灯控制设计学院:信息工程与自动化系:通信专业:通信工程年级:姓名:学号:分数:一、需求分析1.1需求分析交通灯通常指由红、黄、绿三种颜色灯组成用来指挥交通的信号灯。
绿灯亮时,准许车辆通行,黄灯亮时,已越过停止线的车辆可以继续通行;红灯亮时,禁止车辆通行。
在如今的社会里,交通灯必不可少,没有交通灯就没有交通秩序,因此此次课程设计设计一个传统的交通灯。
1.2 实现目标红灯亮时,禁止车辆通行,绿灯亮时,准许车辆通行,黄灯亮时,已越过停止线的车辆可以继续通行,没有越过停止线的的需要停车,禁止通行。
红灯亮30秒,绿灯28秒,黄灯2秒。
二、系统设计2.1 流程图及分析2秒后后分析:启动电源后,东西红灯亮(r1),南北绿灯亮(g2);28秒后,东西红灯亮(r1),南北黄灯亮(y2);2秒后,南北红灯亮(r2),东西绿灯亮(g1);28秒后,南北黄灯亮(r2),东西黄灯亮(y1);循环。
2.2 时序图及分析东西向红灯黄灯绿灯南北向 红灯黄灯绿灯0 6 12 18 24 2830 36 42 4854 58 60分析:高电平为灯亮,低电平为灯灭。
前30秒内:东西方向红灯为高电平,南北方向绿灯为高电平,28秒后,南北方向黄灯由低电平转为高电平保持2秒,绿灯由高电平转为低电平;后30秒, 南北方向红灯为高电平,东西方向绿灯为高电平,28秒后, 东西方向黄灯由低电平转为高电平保持2秒,绿灯由高电平转为低电平。
此过程为一个周期。
2.3 接线图及分析分析:在接线时,程控端的公共端接5V 电源的负极,红绿灯的公共端接电源的正极,而红绿灯灯的另一端接程控器的输出端。
2.4 梯形图及分析分析:启动电源后,东西红灯亮(r1),南北绿灯亮(g2);28秒后,东西红灯继续亮(r1),南北绿灯灭(g2),南北黄灯亮(y2);2秒后,东西红灯灭(r1) ,南北红灯亮(r2),东西绿灯亮(g1);28秒后,南北红灯继续亮(r2),东西绿灯灭(g2),东西黄灯亮(y1);东西、南北方向一直保持循环状态。
第1章背景·可编程控制器〔Programmable Controller〕是计算机家族中的一员,是为工业控制应用而设计制造的。
早期的可编程控制器称作可编程逻辑控制器〔Programmable Logic Controller〕,简称PLC,它主要用来代替继电器实现逻辑控制。
随着技术的开展,这种装置的功能已经大大超过了逻辑控制的X围,因此,今天这种装置称作可编程控制器,简称PC。
但是为了防止与个人计算机〔Personal puter〕的简称混淆,所以将可编程控制器简称PLC。
目前,PLC在国内外已广泛应用于钢铁、石油、化工、电力、建材、机械制造、汽车、轻纺、交通运输、环保及文化娱乐等各个行业,使用情况大致可归纳为如下几类。
1.1 开关控制这是PLC最根本、最广泛的应用领域,它取代传统的继电器电路,实现逻辑控制、顺序控制,既可用于单台设备的控制,也可用于多机群控及自动化流水线。
如注塑机、印刷机、订书机械、组合机床、磨床、包装生产线、电镀流水线等。
1.2 模拟量控制在工业生产过程当中,有许多连续变化的量,如温度、压力、流量、液位和速度等都是模拟量。
为了使可编程控制器处理模拟量,必须实现模拟量〔Analog〕和数字量〔Digital〕之间的A/D转换及D/A 转换。
PLC厂家都生产配套的A/D和D/A转换模块,使可编程控制器用于模拟量控制。
1.3运动控制PLC可以用于圆周运动或直线运动的控制。
从控制机构配置来说,早期直接用于开关量I/O模块连接位置传感器和执行机构,现在一般使用专用的运动控制模块。
如可驱动步进电机或伺服电机的单轴或多轴位置控制模块。
世界上各主要PLC厂家的产品几乎都有运动控制功能,广泛用于各种机械、机床、机器人、电梯等场合。
1.4 过程控制过程控制是指对温度、压力、流量等模拟量的闭环控制。
作为工业控制计算机,PLC能编制各种各样的控制算法程序,完成闭环控制。
PID调节是一般闭环控制系统中用得较多的调节方法。
实验一天塔之光一、实验目的用PLC构成闪光灯控制系统。
二、控制要求合上启动按钮后,按以下规律显示:L1、L2、L9→L1、L5、L8→L1、L4、L7→L1、L3、L6→L1→L2、L3、L4、L5→L6、L7、L8、L9→L1、L2、L6→L1、L3、L7→L1、L4、L8→L1、L5、L9→L1→L2、L3、L4、L5→L6、L7、L8、L9→L1、L2、L9……如此三、实验设备1、THSMS-A型、THSMS-B型实验装置或THSMS-1型、THSMS-2型实验箱一台2、安装了STEP7-Micro/WIN32编程软件的计算机一台3、PC/PPI编程电缆一根4、锁紧导线若干四、天塔之光的实验面板图:图6-7-1天塔之光控制面板上图中,下框中的L1、L2、L3、L4、L5、L6、L7、L8、L9分别接主机的输出点Q0.0、Q0.1、Q0.2、Q0.3、Q0.4、Q0.5、Q0.6、Q0.7、1.0。
启动按钮接主机的输入点I0.0,停止按钮接主机的输入点I0.1。
M端与主机的M端相连。
四、编制梯形图并写出实验程序步序指令步序指令48 = Q0.4 L5显示61 O M10.749 LD M10.4 62 O M11.250 O M10.7 63 O M11.651 O M11.0 64 = Q0.7 L8显示52 O M11.6 65 LD M10.153 = Q0.5 L6显示66 O M10.754 LD M10.3 67 O M11.356 O M10.7 68 O M11.657 O M11.1 69 = Q1.0 L9显示58 O M11.6 70 LD I0.1 停止59 = Q0.6 L7显示71 R M10.1, 1 复位60 LD M10.2 72 R M11.6, 1 复位梯形图如下所示实验二机械手一、实验目的用数据移位指令来实现机械手动作的模拟。
二、机械结构和控制要求图中为一个将工件由A处传送到B处的机械手,上升/下降和左移/右移的执行用双线圈二位电磁阀推动气缸完成。
当某个电磁阀线圈通电,就一直保持现有的机械动作,例如一旦下降的电磁阀线圈通电,机械手下降,即使线圈再断电,仍保持现有的下降动作状态,直到相反方向的线圈通电为止。
另外,夹紧/放松由单线圈二位电磁阀推动气缸完成,线圈通电执行夹紧动作,线圈断电时执行放松动作。
设备装有上、下限位和左、右限位开关,它的工作过程如图所示,有八个动作,即为:原位下降夹紧上升右移左移上升放松下降三、机械手动作的模拟实验面板图:图6-11-1所示机械手动作的模拟控制面板上图下框中的YV1、YV2、YV3、YV4、YV5、HL分别接主机的输出点Q0.0、Q0.1、Q0.2、Q0.3、Q0.4、Q0.5;SB1、SB2分别接主机的输入点I0.0、I0.5;SQ1、SQ2、SQ3、SQ4分别接主机的输入点I0.1、I0.2、I0.3、I0.4。
上图中的启动、停止用动断按钮来实现,限位开关用钮子开关来模拟,电磁阀和原位指示灯用发光二极管来模拟。
四、工作过程分析:当机械手处于原位时,上升限位开关I0.2、左限位开关I0.04均处于接通(“1”状态),移位寄存器数据输入端接通,使M10.0置“1”,Q0.5线圈接通,原位指示灯亮。
按下启动按钮,I0.0置“1”,产生移位信号,M10.0的“1”态移至M10.1,下降阀输出继电器Q0.0接通,执行下降动作,由于上升限位开关I0.2断开,M10.0置“0”,原位指示灯灭。
当下降到位时,下限位开关I0.1接通,产生移位信号,M10.0的“0”态移位到M10.1,下降阀Q0.0断开,机械手停止下降,M10.1的“1”态移到M10.2,M20.0线圈接通,M20.0动合触点闭合,夹紧电磁阀Q0.1接通,执行夹紧动作,同时启动定时器T37,延时1.7秒。
机械手夹紧工件后,T37动合触点接通,产生移位信号,使M10.3置“1”,“0”态移位至M10.2,上升电磁阀Q0.2接通,I0.1断开,执行上升动作。
由于使用S指令,M20.0线圈具有自保持功能,Q0.1保持接通,机械手继续夹紧工件。
当上升到位时,上限位开关I0.2接通,产生移位信号,“0”态移位至M10.3,Q0.2线圈断开,不再上升,同时移位信号使M10.4置“1”,I0.4断开,右移阀继电器Q0.3接通,执行右移动作。
待移至右限位开关动作位置,I0.3动合触点接通,产生移位信号,使M10.3的“0”态移位到M10.4,Q0.3线圈断开,停止右移,同时M10.4的“1”态已移到M10.5,Q0.0线圈再次接通,执行下降动作。
当下降到使I0.1动合触点接通位置,产生移位信号,“0”态移至M10.5,“1”态移至M10.6,Q0.0线圈断开,停止下降,R指令使M20.0复位,Q0.1线圈断开,机械手松开工件;同时T38启动延时1.5秒,T38动合触点接通,产生移位信号,使M10.6变为“0”态,M10.7为“1”态,Q0.2线圈再度接通,I0.1断开,机械手又上升,行至上限位置,I0.2触点接通,M10.7变为“0”态,M11.0为“1”态,Q0.2开,停止上升,Q0.4线圈接通,I0.3断开,左移。
到达左限位开关位置,I0.4触点接通,M11.0为“0”态,M11.1为1”态,移位寄存器全部复位,Q0.4线圈断开,机械手回到原位,由于I0.2、I0.4均接通,M10.0被置“1”,完成一个工作周期。
再次按下启动按钮,将重复上述动作。
五、实验设备1、THSMS-A型、THSMS-B型实验装置或THSMS-1型、THSMS-2型实验箱一台2、安装了STEP7-Micro/WIN32编程软件的计算机一台3、PC/PPI编程电缆一根4、锁紧导线若干六、实验程序44 LD M10.0 55 O M10.745 = Q0.5 56 = Q0.2 上移46 LD M10.1 57 LD M10.447 O M10.5 58 = Q0.3 右移48 = Q0.0 59 LD M11.049 LD M10.2 60 = Q0.4 左移50 S M20.0, 1 61 LD M10.651 TON T37, +17 62 R M20.0, 152 LD M20.0 63 TON T38, +15梯形图实验三四节传送带的模拟一、实验目的通过使用各基本指令,进一步熟练掌握PLC的编程和程序调试。
二、控制要求有一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下:启动时先起动最末一条皮带机,经过5秒延时,再依次起动其它皮带机。
停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。
当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完后才停止。
例如M2故障,M1、M2立即停,经过5秒延时后,M3停,再过5秒,M4停。
当某条皮带机上有重物时,该皮带机前面的皮带机停止,该皮带机运行5秒后停,而该皮带机以后的皮带机待料运完后才停止。
例如,M3上有重物,M1、M2立即停,再过5秒,M4停。
三、实验设备1、THSMS-A型、THSMS-B型实验装置或THSMS-1型、THSMS-2型实验箱一台2、安装了STEP7-Micro/WIN32编程软件的计算机一台3、PC/PPI编程电缆一根4、锁紧导线若干四、四节传送带的模拟实验面板图:图6-12-1所示四节传送带的模拟控制面板上图下框中的KM1、KM2、KM3、KM4分别接主机的输出点Q0.1、Q0.2 、Q0.3、Q0.4:SB1、SB2、分别为主机的输入点.I0.0、I0.5;表示负载或故障设定的A、B、C、D分别接主机输入点I0.1、I0.2、I0.3、I0.4。
上框中启动、停止用动合按钮来实现,负载或故障设置用钮子开关来模拟,电机的停转或运行用发光二极管来模拟。
五48 LD T44 65 R Q0.4, 1 D电机停转49 R Q0.3, 1 C电机停转66 LD I0.3 故障C50 = M9.0 67 R Q0.1, 1 A电机停转51 LD M9.0 68 R Q0.2, 1 B电机停转52 R Q0.4, 1 D电机停转69 R Q0.3, 1 C电机停转53 LD I0.2 故障B 70 = M12.054 R Q0.1, 1 A电机停转71 LD M12.055 R Q0.2, 1 B电机停转72 TON T47, +5056 = M10.0 73 LD T4757 LD M10.0 74 R Q0.4, 1 D电机停转58 TON T45, +50 75 LD I0.4 故障D59 LD T45 76 R Q0.1, 1 A电机停转60 R Q0.3, 1 C电机停转77 R Q0.2, 1 B电机停转61 = M11.0 78 R Q0.3, 1 C电机停转62 LD M11.0 79 R Q0.4, 1 D电机停转梯形图实验四液体混合装置控制的模拟一、实验目的熟练使用置位和复位等各条基本指令,通过对工程实例的模拟,熟练地掌握PLC的编程和程序调试。
二、液体混合装置控制的模拟实验面板图:图6-9-1所示液体混合装置控制面板上图下框中的V1、V2、V3、M分别接主机的输出点Q0.0、Q0.1、Q0.2、Q0.3;起、停按钮SB1、SB2分别接主机的输入点I0.0、I0.1;液面传感器SL1、SL2、SL3分别接主机的输入点I0.2、I0.3、I0.4。
上图中,液面传感器利用钮子开关来模拟,启动、停止用动合按钮来实现,液体A阀门、液体B阀门、混合液阀门的打开与关闭以及搅动电机的运行与停转用发光二极管的点亮与熄灭来模拟。
三、控制要求由实验面板图可知:本装置为两种液体混合装置,SL1、SL2、SL3为液面传感器,液体A、B阀门与混合液阀门由电磁阀YV1、YV2、YV3控制,M为搅动电机,控制要求如下:初始状态:装置投入运行时,液体A、B阀门关闭,混合液阀门打开20秒将容器放空后关闭。
启动操作:按下启动按钮SB1,装置就开始按下列约定的规律操作:液体A阀门打开,液体A流入容器。
当液面到达SL2时,SL2接通,关闭液体A阀门,打开液体B阀门。
液面到达SL1时,关闭液体B阀门,搅动电机开始搅动。
搅动电机工作6秒后停止搅动,混合液体阀门打开,开始放出混合液体。
当液面下降到SL3时,SL3由接通变为断开,再过2秒后,容器放空,混合液阀门关闭,开始下一周期。
停止操作:按下停止按钮SB2后,在当前的混合液操作处理完毕后,才停止操作(停在初始状态上)。
四、编制梯形图并写出程序五、程序设计及工作过程分析启动操作:按下启动按钮SB1,I0.0的动合触点闭合,M10.0产生启动脉冲,M10.0的动合触点闭合,使Q0.0保持接通,液体A电磁阀YV1打开,液体A流入容器。