雷达硬件及采样参数选取分析
- 格式:ppt
- 大小:2.46 MB
- 文档页数:41
RIS-地质雷达RIS探地雷达一、概述博泰克RIS探地雷达在兼具了传统探地雷达各项优点的同时,增添了高灵敏度、高分辨率的天线阵,使浅层和深层探测一次完成,实现了三维立体探测,大大提高了工作效率,具有数据采集完整、快速、低误差等特点。
适用于公路路面、隧道衬砌质量的检测、桥梁结构检测、路基检测、管线探测、岩性分析和条件恶劣场地的应用。
使用博泰克RIS天线阵雷达进行公路和隧道检测如图8-1所示。
图8-1 RIS探地雷达二、RIS K2主机技术参数1、扫描速度: 850扫/秒2、脉冲重复频率:400KHz3、时窗: 9999 nsec4、采样点数: 128-81925、叠加数: 1-327686、分辨率: 5psec7、工作温度:-10~50℃8、A/D转换: 16bit9、工作环境标准: IP6510、动态范围: >160dB11、信噪比: >160dB12、可连接8对天线同时测量13、尺寸:22x17x5.5cm,重量:1.2kg现场测量开始前应该对雷达的采集参数进行设定,这一工作最好在进入现场前在室内完成,进入现场后可根据情况略加调整。
参数设定的内容包括时间窗口大小、扫描样点数、每秒扫描数、A/D转换位数、增益点数等内容。
参数设置的是否合理影响到记录数据的质量,至关重要。
★探测深度与时窗长度探测深度的选取是头等重要的,既不要选得太小丢掉重要数据,也不要选得太大降低垂向分辨率。
一般选取探测深度H为目标深度的1.5倍。
根据探测深度H和介电常数ε确定采样时窗长度(Range/ns):Range= 2H(ε)1/2/0.3(ns)= 6.6 H(ε)1/2(ns)例如对于地层岩性为含水砂层时,介电常数为25,探测深度为3m时,时窗长度应选为100ns,时窗选择略有富余,宁大勿小。
★A/D采样分辨率:雷达的A/D转换有8Bit、16Bit、24Bit可供选用。
选择24Bit动态大,强弱反射信号都能记录下来,探测深度大、时窗长时采用。
软件雷达射频采样ADC性能需求分析卢庆广;夏栋【摘要】The target of software radar is to digitalize the received signals so that more signal process and data process are completed by software. Due to the high frequency of RF, Nyquist low-pass sampling technique is invalid. This text explores how to accomplish the analog to digital conversion of radar signal with lower sampling frequency by band-pass sampling principle. The reference of ADC design is provided through the specific analyses of sampling rate, ADC and SNR.%软件雷达的目标是使ADC 尽可能早的将接收到的信号数字化,从而使更多的信号处理和数据处理通过软件来实现.由于雷达射频频率高,无法采用Nyquist低通采样技术对其进行采样.本文研究了利用带通采样定理使用较低的采样频率实现雷达模拟信号到数字信号的转化,并分别对雷达射频信号进行带通采样对模数转换器采样速率、转换位数、信噪比等性能参数进行了具体分析,为模数转换器的设计提供参考.【期刊名称】《舰船科学技术》【年(卷),期】2012(034)001【总页数】3页(P128-130)【关键词】软件雷达;射频采样;ADC【作者】卢庆广;夏栋【作者单位】海军工程大学海洋电磁环境研究所,湖北武汉430033;海军工程大学海洋电磁环境研究所,湖北武汉430033【正文语种】中文【中图分类】TN950 引言软件雷达设计的理念是AD和DA转换器尽量靠近天线,使得模拟信号尽可能早地数字化,从而将其变换为适合于数字信号处理器或计算机处理的数据流,然后通过软件(算法)来完成各种功能[1-3]。
仪器性能1.博泰克RIS雷达的优势:1. 航天技术,品质极高:制造商意大利IDS公司是一家包括导航雷达部,探地雷达部等相关产品的著名厂家,其设计宗旨就是潜心研究出优于普通雷达设备的实用型探测系统,产品技术更新快;2. 模块式设计配置灵活,硬件升级自如;·博泰克RIS主机可与本公司所有天线兼容,用户可按需选配,极大地节约了成本·已购买单通道主机用户,如需使用多通道主机,可由单通道升级为四通道,避免了重复投资·天线可根据需要由单天线升级为精度更高和速度更快的天线阵3. 雷达天线屏蔽效果好(军工级屏蔽),精度和分辨率很高,带绘图系统的测量轮可精确定位目标,多极数据使得目标形状识别及环境识别更加精确;4. 雷达主机、天线和电池的体积小、重量轻、稳定性高,单人操作,遥控操作,自动设置;防水、防尘和抗震性能好,能适应各种恶劣的工作环境(隧道、井下等);具有极高的发射速率和扫描速度,完全满足公路快速检测的要求;5. 独有的天线阵设计使雷达探测技术登上了一个新台阶:有专门的公路及隧道检测天线阵(600+1600MHz) ,最大探测速度可达80Km/h,探测深度为1.5-2米,一次就可以完成面层、基层等的精确分层检测和空洞、裂隙、软弱带等路基检测的要求;根据需要,还可以在该天线阵的基础上增加100MHz等更低频率的天线,以满足更深的探测要求;6. 雷达主机独有的远程调控功能,通过此功能,国外雷达专家可以随时对雷达系统进行调试和维护;7. 后期处理软件实用方便,功能强大:其公路与隧道分析软件LAYERING可以自动处理雷达数据、自动(手动)追踪层面、自动绘制厚度图、自动在雷达图上标明取芯结果、自动生成厚度报表、直接在雷达图上标注缺陷并打印等;自动物性分类软件SUBREM可以由检测雷达的雷达图,自动对路基、隧道等做分类分析,指出路基的软弱带、高含水区、衬砌后的围岩情况等等,是目前世界上唯一有此功能的雷达处理软件;8.RIS雷达系统采集到的数据可以直接和地理信息系统相连接,实现信息化管理,方便的实现查询、修改、输入、输出等功能,是目前唯一具有此功能的雷达系统;9. 在世界雷达比武上,博泰克RIS雷达以探测速度最快(唯一在规定时间内完成全部探测任务),分辨率和精度最高(探测目标数量多),唯一现场绘制出被探测物的三维立体结构图而荣获第一;10. 博泰克公司技术力量雄厚,对产品进行全方位跟踪服务,除正常的售后培训之外,我们还对需要我方工程师支持的用户,我们都在第一时间到达用户现场,我们已完成的部分协助检测工作:①协助中铁十二局完成了为期两天的秦岭隧道检测;②中铁十四局完成了为期三天的烟黄高速公路的检测;③中铁十八局完成了为期四天的宝天线隧道探测;④中国建筑科学研究院完成了为期四天的空心砖结构建筑工程的检测⑤国家测绘局武汉管网普查复检项目。
测速雷达主要设备功能及技术参数测速雷达型号:KTR-C3(品牌:KITOZER/开拓者)采用高速DSP信号处理芯片、0.1秒快速捕捉。
1)设计小巧轻便、制作精良。
2)纯铸铁结构,坚固耐用。
3)232串口输出。
4)精确度高,捕捉目标速度快。
5)动态时具有同向功能。
6)静态时可分别检测来车、去车。
7)静态测速范围:0~322 KPH。
8)移动测速范围:19~322KPH。
9)环境要求:温度:-30度 ~ +70度;湿度:0 % ~ 90% 。
10)Ka波段窄波雷达,微波频率:34.7GHz(Ka-band),可有效规避探测狗检测。
11)发射角:±4度。
12)规格:重:0.52kg、直径:6.7cm、长:11.8cm。
13)精确度:+/-1KPH。
高清摄像机(品牌:KITOZER/开拓者)高清摄像机功能:CCD成像,200万象素,主要端口有:闪光灯同步口,通过同步线与闪光灯连接;拍照触发口,当收到外部脉冲触发信号时,高清摄像机会抓取一张图片,脉冲信号由独立的拍照触发器发出;网口(100M),与控制主机连接,接收参数配置,上传图片,也可接收带由协议内容的抓拍命令。
产品详细参数表百万像素变焦镜头日本精工本次中煤平朔公司系统百万像素变焦镜头选型为日本精工SE5018MP产品,AVENIR ETOKU(日本精工)十几年来始终专心于监控镜头的市场发展,成为中国安防监控领域用得最多的专业镜头。
本次系统高清摄像机选型为广州莱安智能化系统开发有限公司出品的KTR200A型高清摄像机。
KTR200A是集成一体的高速彩色/单色智能工业相机,采用总像素200万像素的CCD图像传感器,具有处理速度快、分辨率高、图像质量好等特点。
广泛应用于智能交通、电子警察、卡口、高速公路、停车厂等领域的检测和识别。
百万像素网络拍照摄像一体机,将高清图像抓拍、标清视频摄像完美结合,超高清晰度,分辨率达130万~500万像素,专业用于如平安城市建设、机场、银行、道路卡口监控及牌照识别等安全防范领域,能够为客户提供专业的可定制产品及服务,支持后续增值开发。
物理实验技术中的雷达测量与分析方法雷达测量与分析方法在物理实验技术中扮演着重要的角色。
雷达(Radar)是一种利用电磁波进行物体探测和测距、测速的技术手段。
它具有跨越天地、穿云雾、昼夜对目标进行有效探测的能力,广泛应用于航空、军事、气象等领域。
本文将着重讨论雷达测量和分析方法的原理及应用。
首先,雷达测量的基本原理是利用目标散射回来的电磁波进行测量。
雷达发射器发射出高频电磁波,这些电磁波会与目标物体相互作用,一部分被目标物体吸收,一部分被目标物体散射回来,然后被雷达接收器接收。
通过测量接收到的电磁波的一些参数,如功率、频率、相位等,可以推导出目标物体的距离、速度、方位以及目标物体的特性等信息。
针对不同的应用领域和实验目的,雷达测量中有多种不同的技术和方法。
例如,对于大气中杂散回波的测量和分析,我们可以采用相位编码技术。
这种技术可以使雷达接收到的散射信号更加清晰,提高测量的精确度。
另外,如果我们需要对目标物体的形状和结构进行分析,可以采用成像雷达技术。
成像雷达通过接收目标物体散射回来的电磁波,并利用信号处理技术,可以生成目标物体的影像,提供更详细的信息。
除了测量技术,雷达分析方法也是非常重要的一环。
在雷达测量数据分析过程中,我们通常会用到一些统计学和信号处理方法。
例如,当我们需要对雷达中的噪声进行去除时,可以利用滤波器的方法进行信号去噪。
此外,在雷达目标探测中,我们可以采用CFAR(Constant False Alarm Rate)技术,用于判断是否有目标物体存在。
在实际应用中,雷达测量与分析方法被广泛运用于许多领域。
在航空领域,雷达可用于飞机导航、风切变探测等;在军事领域,雷达可用于目标探测与追踪、战场监测等;在气象领域,雷达可用于测量降雨强度、风速和方向等。
此外,雷达还有许多其他应用,如地质勘探、环境监测等。
然而,雷达测量与分析方法也存在一些挑战和限制。
首先,受到电磁波传播特性的限制,雷达在复杂环境或目标密集区域的性能会受到影响。

.
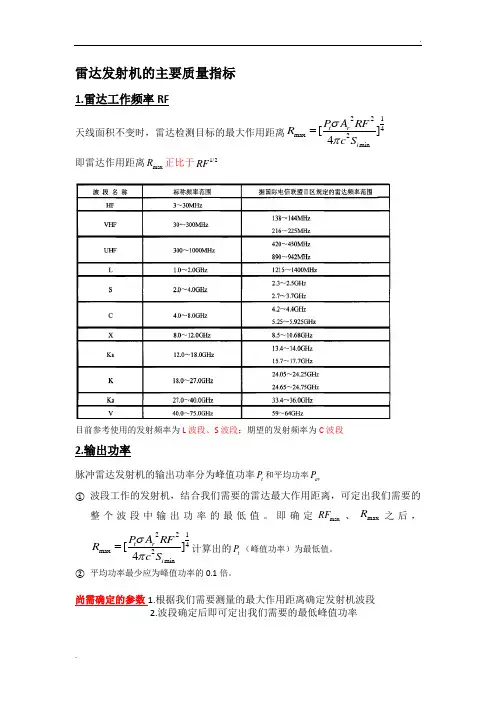
. 雷达发射机的主要质量指标
1.雷达工作频率RF 天线面积不变时,雷达检测目标的最大作用距离1224max
2min
[]4t r i P A RF R c S σπ= 即雷达作用距离max R 正比于1/2RF
目前参考使用的发射频率为L 波段、S 波段;期望的发射频率为C 波段
2.输出功率
脉冲雷达发射机的输出功率分为峰值功率t P 和平均功率av P
① 波段工作的发射机,结合我们需要的雷达最大作用距离,可定出我们需要的
整个波段中输出功率的最低值。
即确定max RF 、max R 之后,1224max 2min
[]4t r i P A RF R c S σπ=计算出的t P (峰值功率)为最低值。
② 平均功率最少应为峰值功率的0.1倍。
尚需确定的参数1.根据我们需要测量的最大作用距离确定发射机波段
2.波段确定后即可定出我们需要的最低峰值功率。
ULS36导波雷达物位计参数1. 介绍导波雷达物位计是一种常用于测量物料的液位或固体物位的仪器。
ULS36导波雷达物位计是一种先进的导波雷达技术应用于物位测量的设备。
本文将详细介绍ULS36导波雷达物位计的参数及其相关信息。
2. ULS36导波雷达物位计的工作原理ULS36导波雷达物位计利用导波雷达技术来测量物料的液位或固体物位。
它通过发射微波信号并接收反射信号来测量物料的高度。
具体工作原理如下:1.发射器发射微波信号:ULS36导波雷达物位计内置的发射器会发射一束微波信号,该信号沿着一根导波杆向物料表面传播。
2.微波信号被物料表面反射:当微波信号遇到物料表面时,一部分信号会被物料表面反射回来。
3.接收器接收反射信号:ULS36导波雷达物位计内置的接收器会接收到反射回来的微波信号。
4.计算物料高度:通过测量微波信号的往返时间,ULS36导波雷达物位计可以计算出物料的高度。
3. ULS36导波雷达物位计的参数ULS36导波雷达物位计具有多个参数,下面将详细介绍其中一些重要的参数:3.1 测量范围ULS36导波雷达物位计的测量范围是指它可以测量的物料高度范围。
通常,ULS36导波雷达物位计的测量范围可以从几米到几十米不等,具体的测量范围可以根据用户的需要进行配置。
3.2 精度ULS36导波雷达物位计的精度是指它测量物料高度的准确程度。
通常,ULS36导波雷达物位计的精度可以达到毫米级别,具体的精度取决于设备的配置和使用环境。
3.3 输出信号ULS36导波雷达物位计的输出信号通常有4-20mA模拟信号和数字信号两种形式。
4-20mA模拟信号可以直接连接到PLC或DCS系统进行实时监测和控制。
数字信号可以通过RS485或Modbus等通信协议传输,实现与上位机的数据交互。
3.4 供电方式ULS36导波雷达物位计可以通过直流供电或交流供电两种方式进行供电。
直流供电通常为24VDC,交流供电通常为220VAC或110VAC。
雷达视频高速数据采集方案雷达回波得到大量的雷达图像数据,大量的数据对于数据的高速传输和实时存储都造成了极大的困难。
在带宽一定的前提下,合理的采样率、采样精度、实时的板上FPGA处理及与计算机的数据传输带宽是进行雷达视频采集需要考虑的重要指标。
1. 模拟输入通道数:2通道;2、数字输入通道数:3通道;3、最高采样率: 400MSps;4、 A/D分辨率:14Bit以上;5、量程(输入范围):±5V自校准;6、输入信号带宽:0Hz~200MHz;7、触发方式:用户可以通过FPGA二次开发;8、触发电平:12VCOMS;9、每通道64Msamples10、USB或PXIe总线接口采集系统如下:板卡图形板卡原理框图触发信号可以通过如下图输入:FPGA可以用户开发,我们可根据需求描述的情况,重新对FPGA编程,满足以下情况:由触发信号Trig控制开始采集和存储,天线每旋转一圈,会产生一个0点信号(HD)和360个方位信号(BP),每次采集128-130圈,即采集到128-130个0点信号(采集的点数能够在软件上任意设置)。
工作时并不是360°方位角全部采集,应能在软件上设置任意角度采集,在采集扇角外的区域内,只数字计数,AD不采集。
关于坤驰科技:坤驰科技专注于高速信号采集与数据采集产品与解决方案方案的高科技公司,公司成立于2006年,位于中关村科技园区。
坤驰科技立足虚拟仪器及测量领域,专注于高速数据采集产品提供与系统开发,成熟产品有:高速数据采集卡/数字化仪、高速AD卡、DA卡、数字IO卡、FPGA开发板、DSP处理板、中频信号采集、高频信号采集与处理的研发与系统解决方案。
公司地址:北京海淀区上地信息路1号国际科技创业园2号楼6层西公司网址:全国咨询电话:400-000-4026。
雷达性能参数(文档4篇)以下是网友分享的关于雷达性能参数的资料4篇,希望对您有所帮助,就爱阅读感谢您的支持。
无人驾驶汽车激光雷达性能参数第一篇无人驾驶汽车的激光雷达性能参数激光雷达最早的定义是LIDAR,英文为Light Deteation and Ranging,中文意思是「光的探测和测距」。
其实更准确的一个定义是LADAR:LAser Detection and Ranging,即「激光的探测和测距」。
这是在2004 年提出的定义,更符合激光雷达的概念。
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率;抗干扰能力强:激光波长短,可发射发散角非常小(μrad 量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标;获取的信息量丰富:可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像;可全天时工作:激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。
它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。
激光雷达在无人驾驶中的功能:◆路沿检测,也包括车道线检测;◆障碍物识别,对静态物体和动态物体的识别;◆定位以及地图的创建。
一款好的激光雷达设备都有哪些评判标准呢?“单位时间出点数、点云测量精度、测距范围三方面的具体性能直接决定了激光雷达设备品质的好坏”。
激光雷达详细的参数如下:线束:16线波长:905nm激光等级:class 1精度:±2cm(典型值)测距:20cm~150m(目标反射率40%)出点数:320,000pts/s垂直测角:30°垂直角分辨率:2.0º水平测角:360º水平角分辨率:0.1º至0.4º转速:300-1200rpm (5-20Hz)输入电压:9-32VDC产品功率:9w(典型值)防护安全级别:IP67操作温度:-10~60°C规格:H:82.7mm*φ:109mm重量:0.84kg(不包含数据线)采集数据:三维空间坐标/反射率购买汽车教学设备哪家好?广东中才教学仪器有限公司是一家专业生产汽车教学仪器的厂家,所售产品既有大企业的质量优势又有小企业的价格优势,欢迎广大新老客户来厂考察,来电咨询。
激光雷达行业非常广阔,每个细分方向都可以大有所为。
就单线激光雷达而言,致力于解决好机器人的自主定位导航能力,能突破的道路只有一条:以实用性和可靠性作为第一考虑,而非一味的去追求参数。
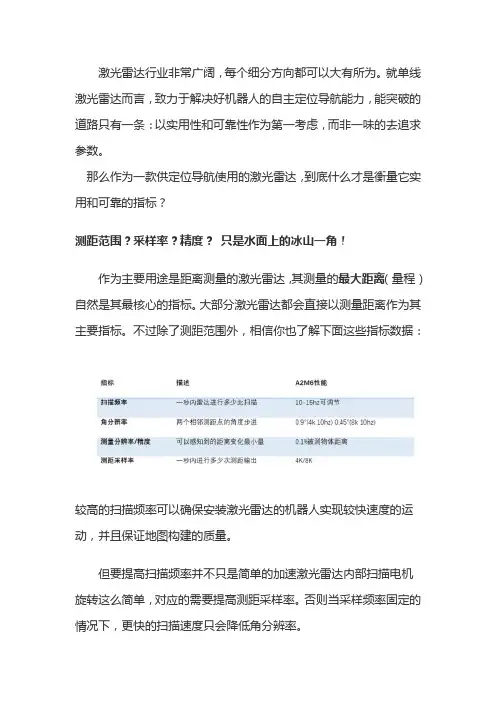
那么作为一款供定位导航使用的激光雷达,到底什么才是衡量它实用和可靠的指标?测距范围?采样率?精度?只是水面上的冰山一角!作为主要用途是距离测量的激光雷达,其测量的最大距离(量程)自然是其最核心的指标。
大部分激光雷达都会直接以测量距离作为其主要指标。
不过除了测距范围外,相信你也了解下面这些指标数据:较高的扫描频率可以确保安装激光雷达的机器人实现较快速度的运动,并且保证地图构建的质量。
但要提高扫描频率并不只是简单的加速激光雷达内部扫描电机旋转这么简单,对应的需要提高测距采样率。
否则当采样频率固定的情况下,更快的扫描速度只会降低角分辨率。
除了测距距离、扫描频率之外,测量分辨率和精度对于激光雷达性能来说同样重要,并且对于三角测距激光雷达而言,也更具有挑战。
由于测量原理的关系,虽然一般在10米以内都可以实现很高的测距分辨率,但其分辨率亦会随着探测物体距离增加而剧烈下降。
因此,为了实现更远距离的探测,就不只是增加激光器功率这么简单了,需要对于测距核心有本质的改良。
同时为了可靠量产,也需要做很多的配套工作。
上面列举的这些性能指标都是大家所知道的,自然也是激光雷达厂家长久以来一直在不断追求和突破的。
不过,这个并不是说要盲目的追求这些指标的提高,而是要像前面所说,要更加看重整体产品的实用和可靠性,更好的参数不一定能带来更好的产品,可能还会带来其他方面的缺失。
所以现在,我们来聊聊你可能不熟悉的激光雷达的一面,也是在选择激光雷达产品时所需要注重考虑的因素。
水下的冰山-日光抗击能力和深色物体检出率除了上述测距距离、采样率、精度等大家都熟知的性能指标外,在雷达实际使用中还有两个非常重要但往往不太被大家了解的性能指标:深色物体检出率环境光抗干扰能力在实际工作中,很多应用环境中的物体大多不是白色墙面,而是深色的,如家具,暗色的墙纸。
雷达设备测试要求及方法第七部分:雷达设备测试要求及方法目次1范围 (1)2规范性引用文件 (1)3通用要求 (1)3.1工作频率范围 (1)3.2信道间隔 (1)3.3天线端口,设备监测端口 (1)3.4发射功率 (1)3.5频率容限 (1)3.6占用带宽 (1)3.7杂散发射 (2)4试验条件 (2)4.1大气实验条件 (2)4.2检测工作条件 (2)4.3测试频率 (2)4.4测试设备 (2)5参考技术要求及测试方法 (3)5.1脉冲雷达(气象雷达、船用雷达、航路监视一次雷达、二次监视雷达) (3)5.2非调制单频雷达,非调制多频雷达 (4)5.3调频雷达(线性调频雷达,调频连续波雷达) (5)参考文献 (7)在用无线电台(站)设备测试要求及方法第七部分:雷达设备1范围本文件规定了在用雷达发射设备的测试要求及方法等内容。
本文件适用于在用雷达发射设备,包括:-气象雷达(C波段/S波段/X波段天气雷达/多普勒天气雷达,测风雷达,风廓线雷达);-船用雷达;-航路监视一次雷达;-二次监视雷达;-连续波雷达(非调制单频/多频连续波雷达/调频连续波雷达);-调频雷达(线性调频雷达)。
2规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅所注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 12572-2008 无线电发射设备参数通用要求和测量方法3通用要求3.1工作频率范围在用雷达发射设备的工作频率范围应严格按照无线电管理机构相关规定执行。
在用雷达发射设备的用户应按照无线电管理机构的相关规定申请台站执照,并按照执照中指配的工作信道使用,不可随意更改工作信道。
3.2信道间隔在用雷达发射设备的工作信道间隔应严格按照无线电管理机构最新的相关规定执行。
3.3天线端口,设备监测端口在用雷达发射设备天线端口及设备监测端口阻抗为50 。
3.4发射功率在用雷达发射设备的发射功率应符合无线电管理机构核定的参数和技术资料的要求。
机载激光雷达(Lidar)数据采集及数据处理摘要:Lidar是指安装在飞机上的测距与机载激光探测系统,量测地面物体的三维坐标,从而生产Lidar数据影像。
Lidar数据通过相关软件数据处理之后,就能够生成精度较高的数字地面模型DEM、正射影像图和等高线图。
近年来,网络通讯技术、计算机技术、激光测距技术及GPS技术等技术的不断发展成熟,机载激光雷达技术正蓬勃发展,欧美等一些发达国家逐步研制出很多种机载激光雷达测量系统,主要包括 LeicaALS50,Optech等等,它的应用已超国遥感所覆盖的范围和传统测量,成为一种特有的数据获取方式。
一、机载激光雷达机载激光雷达是导航系统、全球定位系统以及激光惯性3种技术集于一身的空间测量系统(如图1)。
此系统是将惯性导航系统、激光扫描仪、GPS接受机、数码相机以及控制元件等搭载在载体的飞机之上。
它主动朝地面发射激光脉冲,接受反射脉冲并对所使用的时间及时记录,计算出激光扫描仪距离地面的距离,POS系统所测得的姿态信息和位置能够计算出地面点的三维坐标。
图1 机载激光雷达系统比较传统的摄影测量,激光雷达可以进行直接获取目标的三维信息,数据到有用信息的过程得以缩短。
激光雷达的明显特征是激光能够穿透植被的叶面抵达地表,同时获取植被和地面的信息,探测细小目标也可以被探测到,从而获取的数据信息丰富,目前来说是其他技术所不及的。
二、数据的采集1、数据采集前准备工作在数据采集之前需要进行多方面详细周密的准备工作,其中主要包括选择检校场、设计航线、申请空域和布设地面基准站。
2、申请空域在任何一个航摄任务执行前要按照规定向有关部门提出空域取得航飞权的申请。
在航飞权期间挑选最好的天气飞行,这样可以使拍摄影像的质量得到保证。
3、航线设计在对航飞路线设计时,要遵循经济、周密、安全和高效的原则,选则专门的航飞设计软件来对飞行路线进行设计。
通常在航线设计时,要参考小比例尺的二维平面地形图,综合的进行测区的地貌、地形、机载激光雷达设备的参数(扫描角、相机镜头焦距、扫描频率等)天气条件(雾、云、烟尘、降雨等等)航带重叠度、航带宽度和用户要求的点云密度考虑,设计出符合项目精度要求的航线。
第1篇一、实验目的本次实验旨在了解地质雷达的工作原理,掌握地质雷达仪器的操作方法,并通过实际操作,验证地质雷达在探测地下结构、岩土工程等领域中的应用效果。
二、实验原理地质雷达(Ground Penetrating Radar,GPR)是一种利用高频电磁波探测地下结构、岩土工程等的非接触式探测技术。
其工作原理是:主机通过天线向地下发射高频电磁波,当电磁波遇到不同电性差异的目标体或不同介质的界面时,会发生反射与透射。
反射波返回地面后,被接收天线所接收。
主机记录下电磁波从发射到接收的双程时间t和幅度与波形资料,通过对图像进行解释和分析,确定不同界面及深度、空洞等。
三、实验仪器1. 地质雷达主机:美国SIR-20型地质雷达。
2. 天线:270MHz和100MHz高频天线。
3. 数据采集系统:与主机相连的笔记本电脑。
四、实验步骤1. 确定探测区域:选择合适的探测区域,并对区域进行清理,确保无障碍物。
2. 测线布置:根据探测深度要求,选择合适的天线。
本次实验采用270MHz和100MHz高频天线。
针对地下通道,测线垂直通道延伸的方向布设;针对城墙,测线沿城墙走向及垂直城墙走向进行探测。
3. 测量参数设置:根据《岩土工程勘察规范》(GB50021-2001),设置测量参数,包括时窗范围、采样率、扫描率等。
4. 数据采集:启动地质雷达主机,进行连续测量,记录下电磁波从发射到接收的双程时间t和幅度与波形资料。
5. 数据处理与分析:将采集到的数据导入数据处理软件,对数据进行滤波、去噪等处理,分析地下结构、岩土工程等信息。
五、实验结果与分析1. 地下通道探测:通过对地下通道的探测,发现地下通道的走向、深度、宽度等信息。
结果显示,地下通道的走向与测线布置方向一致,深度约为5.0m,宽度约为2.0m。
2. 城墙探测:通过对城墙的探测,发现城墙的厚度、结构等信息。
结果显示,城墙的厚度约为1.5m,结构较为完整。
3. 数据处理与分析:通过对数据的滤波、去噪等处理,提高了探测结果的准确性。