- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
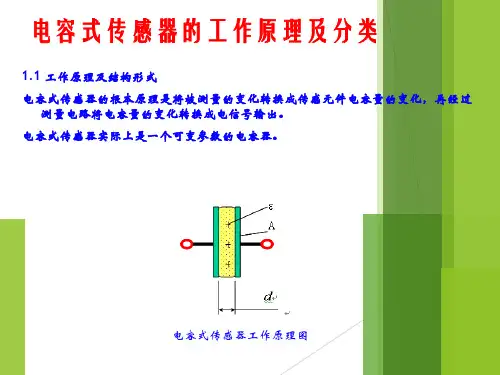
1.2.1 静态特性 静态特性 指当被测量的各个值处于稳定状态(静态测量)时,传感器的输 出值与输入值之间关系的数学表达式、曲线或数表。借助实验 的方法确定传感器静态特性的过程称为静态校准。校准得到的 静态特性称为校准特性。在校准使用了规范的程序和仪器后,工 程上常将获得的校准曲线看作该传感器的实际特性。 1.线性度 线性度 人们为了标定和数据处理的方便, 总是希望传感器的输出与输 入关系呈线性,并能准确无误地反映被测量的真值,但实际上这往 往是不可能的。 假设传感器没有迟滞和蠕变效应,其静态特性可用下列多项式 来描述:
第1章 传感器的特性 章 传感器的特性 表1.1 传感器输入被测量 传感器输入被测量
第1章 传感器的特性 章 传感器的特性 2. 按工作原理分类 按工作原理分类 这种分类方法以传感器的工作原理作为分类依据, 见表1.2。
第1章 传感器的特性 章 传感器的特性 传感器按工作原理的分类 表1.2 传感器按工作原理的分类
y = a0 + a1x + a2 x + ... + an x = a0 + ∑ai xi
2 n i =1 n
因为直线上任何点的斜率都相等,所以传感器的灵敏度为 y a1= =k=常数(1.3) x
第1章 传感器的特性 章 传感器的特性 2) 输出 输入特性曲线关于原点对称 输出-输入特性曲线关于原点对称 输入特性曲线关于原点对称 这种情况见图1.2(b)。此时,在原点附近相当范 围内曲线基本成线性,式(1.1)只存在奇次项: y=a1x+a3 x3 +a5x5+… (1.4)
第1章 传感器的特性 章 传感器的特性 需要注意的是,由于采用的拟合直线即理论直线不同,线 性度的结果就有差异。因此,即使在同一条件下对同一传感 器作校准实验时,得出的非线性误差ξL也就不一样,因而在给 出线性度时,必须说明其所依据的拟合直线 拟合直线。 拟合直线 一般而言,这些拟合直线包括理论直线、端点连线、最 小二乘拟合直线、最佳直线等。与之对应的有理论线性度、 端点连线线性度、最小二乘线性度、独立线性度等。(1) ( ) 理论直线。 理论直线。如图1.3(a)所示,理论直线以传感器的理论特性直 线(图示对角线)作为拟合直线,它与实际测试值无关。其 优点是简单、方便,但通常(∆yL)max很大。
第1章 传感器的特性 章 传感器的特性 3. 按输出信号形式分类 按输出信号形式分类 这种分类方法是根据传感器输出信号的不同来进 行分类,见表1.3。
第1章 传感器的特性 章 传感器的特性 表1.3 传感器按输出信号形式的分类
第1章 传感器的特性 章 传感器的特性
1.2 传感器的基本特性 传感器的基本特性
第1章 传感器的特性 章 传感器的特性 式中:
∑ x = x + x + ... + x ∑ y = y + y + ... + y ∑ x y = x y + x y + ... + x ∑ x = x + x + ... + x
i 1 2 n i 1 2 n i i 1 1 2 2 2 i 2 1 2 2 2 n
3) 输出 输入特性曲线不对称 输出-输入特性曲线不对称 输入特性曲线不对称 这时,式(1.1)中非线性项只是偶次项,即 y=a1x+a2x2 +a4x4 +… 对应曲线如图1.2(c)所示。 (1.5)
第1章 传感器的特性 章 传感器的特性 4) 普遍情况 ) 普遍情况 普遍情况下的表达式就是式(1.1),对应的曲线如 图1.2(d)所示。 当传感器特性出现如图1.2中(b)、(c)、(d)所 示的非线性情况时,就必须采取线性化补偿措施 线性化补偿措施。 线性化补偿措施 实际运用时,传感器数学模型的建立究竟应取几阶 多项式,是一个数据处理问题。建立数学模型的古典方 法是分析法。该法太复杂,有时甚至难以进行。利用校 分析法。 校 分析法 准数据来建立数学模型,是目前普遍采用的一种方法,它 准数据 很受人们重视,并得到了发展。
第1章 传感器的特性 章 传感器的特性 传感器的静态特性就是在静态标准条件下,利用校准数据确 立的。 静态标准条件是指没有加速度、振动和冲击(除非这些参数 本身就是被测物理量),环境温度一般为室温20±5℃, 相对温度不 大于85%,大气压力为0.1 MPa的情况。在这样的标准工作状态下, 利用一定等级的校准设备 一定等级的校准设备,对传感器进行往复循环测试,得到的输 一定等级的校准设备 出-输入数据一般用表格列出或画成曲线。 通常,测出的输出-输入校准曲线与某一选定拟合直线不吻合 的程度,称之为传感器的“非线性误差 非线性误差”,或称为“线性度 线性度”.用相 非线性误差 线性度 对误差表示其大小,即传感器的正、反行程平均校准曲线与拟合直 线之间的最大偏差绝对值对满量程(F.S.)输出之比(%): |(∆yL)max∣ ξL = ×100% yF.S
第1章 传感器的特性 章 传感器的特性
第1章 传感器的特性 章 传感器的特性
1.1 传感器的组成及分类 1.2 传感器的基本特性 思考题与习题
第1章 传感器的特性 章 传感器的特性
1.1 传感器的组成及分类
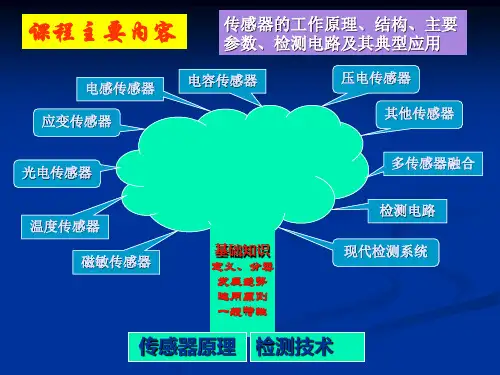
1.1.1 传感器的组成 传感器的组成 传感器的作用主要是感受 响应 感受和响应 被测量, 感受 响应规定的被测量 被测量 并按一定规律将其转换成有用输出 有用输出, 特别是完成非电 有用输出 量到电量的转换。传感器的组成, 并无严格的规定。 一般说来, 可以把传感器看作由敏感元件(有时又称 为预变换器)和变换元件(有时又称为变换器)两部 分组成, 见图1.1。
第1章 传感器的特性 章 传感器的特性
y
y
(∆ y L)max
(∆ y L)max
o (a)
x
o (b)
x
图1.3 几种不同的拟合直线 (a) 理论直线;(b) 端点连线;
第1章 传感器的特性 章 传感器的特性 ( 2) 端点连线 ) 端点连线。如图1.3(b)所示,它是以传感器校准曲线两 端点间的连线作为拟合直线。其方程式为 y=b+kx 式中b和k分别为截距和斜率。这种方法方便、直观,但 (∆yL)max也很大。 (3)最小二乘拟合直线。这种方法按最小二乘原理求取拟 )最小二乘拟合直线。 合直线,该直线能保证传感器校准数据的残差平方和最小。 如图1.3(c)所示,若用y=kx+b表示最小二乘拟合直线,式中的系 数b和k可根据下述分析求得。 设实际校准测试点有n个,则第i个校准数据yi与拟合直线 上相应值之间的残差为 ∆i=yi-(b+kxi)
第1章 传感器的特性 章 传感器的特性 在实际情况中,由于有一些敏感元件直接就可以输出变换 后的电信号,而一些传感器又不包括敏感元件在内,故常常无 法将敏感元件与变换器严格加以区别。 如果把传感器看作一个二端口网络,则其输入信号主要是 被测的物理量(如长度、力)等时,必然还会有一些难以避免 的干扰信号(如温度、电磁信号)等混入。严格地说,传感器 的输出信号可能为上述各种输入信号的复杂函数。就传感器 设计来说,希望尽可能做到输出信号仅仅是(或分别是)某一 被测信号的确定性单值函数,且最好呈线性关系。对使用者来 说,则要选择合适的传感器及相应的电路,保证整个测量设备 的输出信号能惟一、正确地反映某一被测量的大小,而对其它 干扰信号能加以抑制或对不良影响能设法加以修正。
第1章 传感器的特性 章 传感器的特性
y = a0 + a1 x + a 2 x + ... + a n x = a0 + ∑ ai x
2 n i =1
n
i
(1.1)
式中: x——输入量; y——输出量; a0——零位输出; a1——传感器的灵敏度,常用k表示; a2,a3,…,an——非线性项的待定常数。 式(1.1)即为传感器静态特性的数学模型。该多项式 可能有四种情况,如图1.2所示。
第1章 传感器的特性 章 传感器的特性
y
y
yi
y =kx +b (+∆ yL)max
(-∆ y L)max o xi (c) x o (d) x
图1.3 几种不同的拟合直线 (c) 最小二乘拟合直线;(d) “最佳直线”
第1章 传感器的特性 章 传感器的特性 按最小二乘法原理,应使 由
第1章 传感器的特性 章 传感器的特性 传感器可以做得很简单,也可以做得很复杂;可以是 无源的网络,也可以是有源的系统;可以是带反馈的闭环 系统,也可以是不带反馈的开环系统;一般情况下只具有 变换的功能,但也可能包含变换后信号的处理及传输电路 甚至包括微处理器CPU。因此,传感器的组成将随不同情 况而异。 1.1.2 传感器的分类 传感器的分类 传感器的分类方法很多,国内外尚无统一的分类方法。 一般按如下几种方法进行分类。 1. 按输入被测量分类 按输入被测量分类 这种方法是根据输入物理量的性质 输入物理量的性质进行分类。表1.1 输入物理量的性质 给出了传感器输入的基本被测量和由此派生的其它量。
n n
∑∆
i =1
n
2 i
最小。故
∑ ∆ = ∑[ y
i =1 2 i i =1
i
− ( kxi + b)] = min
2
,分别对k和b求一阶
偏导数并令其等于零,即可求得k和b:
k= b=
n ∑ xi yi − ∑ xi n ∑ x − ( ∑ xi )
2 i 2
n ∑ xi2 ⋅ ∑ yi − ∑ xi ⋅ ∑ xi yi n ∑ xi2 − ( ∑ xi ) 2
第1章 传感器的特性 章 传感器的特性
y y y
y
o
x
o
x
oxoຫໍສະໝຸດ x(a)(b)
(c)
(d)
图1.2 传感器静态特性曲线