光电吊舱陀螺稳定系统遗传算法控制
- 格式:doc
- 大小:21.50 KB
- 文档页数:2
光电跟踪稳定平台控制系统关键技术浅析【摘要】当前无人机的研究工作和设计水平越来越高,光电跟踪稳定平台作为无人机的重要组成部分,应用也更加广泛。
光电稳定平台的跟踪和稳定程度将会直接影响到整个系统的成像质量。
本文就主要对当前光电跟踪稳定平台控制系统关键技术进行了分析,从视轴稳定控制和自抗扰控制等方面进行了研究,以期能够给日后的光电跟踪稳定平台控制系统中的关键技术有一定的帮助。
【关键词】光电跟踪稳定平台;控制系统;关键技术1 当前光电跟踪稳定平台的研究现状1.1 光电跟踪稳定平台的研究背景光电跟踪稳定平台对无人机、战车以及舰船等载体有着扰动的作用,并且能够更快的对跟踪机动目标进行快速的捕捉,当前已经在侦查、测量以及搜索和营救等多方面都有着广泛的应用。
在军事方面,随着当前科学技术的快速发展,现代化的战争形势也已经出现了。
光电跟踪稳定平台对军事武器的打击力的提升也有着很重要的作用,以往的海、陆、空三维方式的战场已经转变成当前的海、陆、空、信息、天为一体的五维战场。
对比近年来的战争来看,情报信息的实时性已经成为了决定战争胜利与否的重要因素。
而近些年来,侦查用的无人机在战争中的优势和作用也逐渐显现出来了,世界各国也都对无人机的性能进行了大力的研究和开发,我国的侦查用无人机的研发工作也成为了当前国家重点的研究项目。
1.2 光电跟踪稳定平台的研究现状光电跟踪稳定平台,在无人机中有着眼睛的作用,想要对机动目标进行跟踪和测量,与定基座的光电稳定平台伺服系统在性能上有很大的出入,主要是因为机载光电跟踪稳定平台利用了视轴稳定控制的方式。
视轴稳定技术主要是应用了陀螺仪等作为传感器,使其具有更好的稳定性,能够组成一个相对稳定的控制闭环,能够实时的测量出光电跟踪稳定平台在惯性中出现的角速率,并对其工作状态进行伺服系统的调整。
稳定视轴的主要作用就是能够保证摄像机以及红外热像仪等测量功能能够得到更高质量的图片或者视频,而更高质量的图像或者是视频能够提高对跟踪目标的准确度和精准度,进而保证光电稳定平台对目标的跟踪性能。
天眼4M型四传感器陀螺稳定机载吊舱系统
彼岸
【期刊名称】《《军民两用技术与产品》》
【年(卷),期】2006(000)012
【摘要】香港彼岸科仪有限公司生产的天眼4M陀螺稳定光电观测系统内含4个
不同功能的图像传感器,是新一代机载多功能观察记录设备。
4个图像画面的视频信号可单独输出,也可同时显示在1个LCD屏幕上。
操作者可随时了解每个图像传感器的状态和吊舱的空中姿态,轻松实现对地面目标的追踪、记录和拍照。
该设备适用于直升机电力高压线路巡察、警务空中执法、空中指挥抢险救灾及人员搜救、城市规划等。
【总页数】1页(P28)
【作者】彼岸
【作者单位】
【正文语种】中文
【中图分类】V243
【相关文献】
1.基于陀螺稳定平台的吊舱控制系统设计 [J], 汪丹丹;贾临生
2.机载光电系统中四轴陀螺稳定平台设计 [J], 武斌
3.基于Elmo数字伺服控制器的机载吊舱陀螺稳定平台设计 [J], 黄会生;樊利民
4.光电吊舱陀螺稳定系统遗传算法控制 [J], 潘玲
5.天眼2M型陀螺稳定红外/可见光机载吊舱系统 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。

基于陀螺稳定的机载光电转塔系统建模与仿真余驰【摘要】机载光电转塔系统是一种多自由度高精度随动控制系统.能够快速随动、大范围跟踪、高精度对被探测区域目标进行搜索、捕获、跟踪和瞄准,为载机提供高精度和高分辨率的外部环境信息,用于态势感知和指挥决策.建立两轴两框机载光电转塔系统在方位和俯仰的陀螺稳定数学模型,及两者之间的耦合关系.搭建了机载光电转塔系统在方位和俯仰两个自由度的联合仿真模型,根据实际应用需求,在MATLAB仿真环境下对不同外部输入和模拟载机姿态变化扰动的环境进行了全系统联合仿真.对系统的仿真特性进行了分析,仿真结果表明,建立的全系统联合仿真模型合理,系统能够快速响应与稳定控制调节,具有较高的陀螺稳定随动控制精度.%Airborne optical-electronic turret system is a multi-degree of freedom and high precision servo control system.Scouting area object was searched,captured,tracked and aimed with fast servo,big scope track and high precision,which could provide exterior environment information with high precision and resolution for aircraft.Yawing and pitching gyro stabilization mathematics models of double axes and double frame airborne optical-electronic turret system was set up,and their coupling relationship was analyzed.Joint simulation model of airborne optical-electronic turret system in yawing and pitching double degrees of freedom was built,and based on practical application requirement,complete system joint simulation was carried out under MATLAB simulation in different exterior input and simulate environment of aircraft attitude change disturbance.Simulation characteristics of the system wereanalyzed.Simulation results show that complete system joint simulation model is reasonable,and the system can fast respond and steadily control,has upper precision in gyro stabilization servo control.【期刊名称】《激光与红外》【年(卷),期】2017(047)011【总页数】7页(P1392-1398)【关键词】机载光电转塔系统;陀螺稳定;数学模型;随动控制;建模与仿真【作者】余驰【作者单位】庆安集团有限公司航空设备研究所,陕西西安710077【正文语种】中文【中图分类】TP275;V248.1机载光电转塔系统是一种多自由度高精度的随动控制系统,其多数以两自由度随动运行实现对外部被探测区域的搜索、捕获、跟踪、瞄准,可通过光电传感器为载机提供高精度和高分辨率的外部环境信息感知。
![一种陀螺自稳定控制方法[发明专利]](https://uimg.taocdn.com/d657122089eb172dec63b760.webp)
专利名称:一种陀螺自稳定控制方法
专利类型:发明专利
发明人:赵舒芸,宋方,刘继锋,李方昊,丁海妮申请号:CN202010598437.5
申请日:20200628
公开号:CN111796509A
公开日:
20201020
专利内容由知识产权出版社提供
摘要:本发明公开一种陀螺自稳定控制方法,该方法包括:明确并分析稳定平台的结构和工作原理;构建MEMS微机械陀螺模型,并计算其传递函数;构建直流力矩电机模型,并计算其传递函数;构建PWM功放环节模型,并计算其传递函数;综合整理各环节的传递函数,并计算得出整个稳定回路的开环传递函数、闭环传递函数;分析原始系统稳定回路时域性能;搭建双轴稳定平台稳定回路的仿真模型、调节PID参数,最终通过比例、积分、微分设定对被控对象进行校正控制。
本发明的陀螺自稳定控制方法,提高了稳定平台的动静态性能和抗干扰能力。
申请人:西安方元明科技股份有限公司
地址:710075 陕西省西安市高新区科技一路59号嬴园雅筑四号楼10401室
国籍:CN
更多信息请下载全文后查看。
摘要:本文通过研究航空光电吊舱陀螺稳定系统,对其遗传算法进行控制。
航空光电吊舱作为一个系统具有大时延、非线性的特点,同时要求高跟踪以及精度稳定,因此对控制器提出更高的要求。
基于遗传算法(GA)的PID控制技术抗干扰能力较强,能够提高控制系统对高速动态目标的跟踪能力。
关键词:陀螺稳定系统双闭环控制遗传算法Matlab航空光电吊舱陀螺稳定系统,即吊舱结构形式的机载光电跟踪系统。
它将光电载荷安装在稳定平台上,借助陀螺稳定平台隔离载机的振动,进而获得平台空间,通过控制指令的驱动,完成光电载荷对目标的搜索、捕获、跟踪、定位等一系列的任务。
针对机载光电测量仪器放的稳定性,我们设计了一个两维的支撑平台稳像系统,借助该系统吊舱可以完成搜索与跟踪两项基本任务[1]。
1系统的组成稳像系统由主体仪器、控制放大器和脱靶量计算单元三大部分组成,如图1所示[2]:主体仪器:对于稳像系统而言,两轴支撑的常平架结构构成主体仪器。
外环(方位环)垂直装设于基座上,光电测量仪则装设在内环(水平环)上。
正交处理内、外环的转动轴,外环呈360°全周转动。
将二自由度挠性陀螺仪分别装设在内、外环上,借助锁定回路形成速率陀螺,用以量测两轴转动的角速度。
控制放大器:控制放大器对两环上驱动电机转动的控制是根据操作指令和跟踪目标的脱靶量实现的,确保隔离基座摇摆或测量仪的光轴始终锁定施测目标。
脱靶量计算单元:参照由光电跟踪仪测得的图像信息,脱靶量计算单元用以计算目标的脱靶量,处理结果输入控制器作为系统位置环的输入量。
2系统的技术指标框架运动范围:360°全周转动,上仰60°,下俯90°。
指令状态运动角速度和角加速度的最小值分别为30°/s、50°/s2;当载体正弦摇摆频率为0~3Hz,幅值为2°时,稳像精度均在200(RMS)以上。
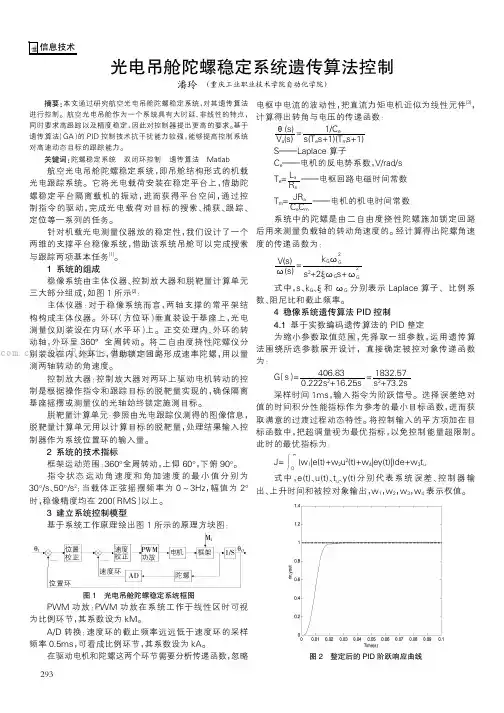
3建立系统控制模型基于系统工作原理绘出图1所示的原理方块图:θl位置校正速度校正PWM功放电机框架M f1/SθO陀螺AD速度环位置环图1光电吊舱陀螺稳定系统框图PWM功放:PWM功放在系统工作于线性区时可视为比例环节,其系数设为kM。
基于陀螺稳定平台的吊舱控制系统设计汪丹丹;贾临生【摘要】将介绍一套基于陀螺稳定平台的吊舱控制系统,分析了吊舱系统的总体结构,着重研究了基于DSP-TMS320F28335的控制系统的硬件设计与软件实现.本系统能够准确的搜索和追踪目标,保持追踪目标的过程中视轴稳定,对隔离扰动有显著地效果.【期刊名称】《装备制造技术》【年(卷),期】2016(000)005【总页数】4页(P95-98)【关键词】陀螺;稳定平台;吊舱系统【作者】汪丹丹;贾临生【作者单位】海军航空兵学院辽宁葫芦岛海军航空兵学院,辽宁葫芦岛 125001;海军航空兵学院辽宁葫芦岛海军航空兵学院,辽宁葫芦岛 125001【正文语种】中文【中图分类】TP273陀螺稳定平台是利用陀螺仪特性来保持平台体的方位处于稳定状态的装置,它集成了惯性导航、数据采集及信号处理、微惯性传感器、精密机械动力学建模仿真和设计、图像处理、电机运动控制和光学仪器应用等多种技术。
将陀螺稳定平台应用于吊舱系统能够有效地提高搜索目标和跟踪目标的准确度,在跟踪目标的过程中,如果系统受到外界的干扰,借助系统中的陀螺稳定平台可以快速地消除扰动,可靠地来保持追踪地过程中视轴处于稳定状态。
本文将介绍一套基于陀螺稳定平台的吊舱控制系统,该系统可以设置在两种模式下工作:一种模式是目标没有被锁定时,陀螺稳定平台工作在搜索模式下,根据控制台给定的搜索指令信号来控制电机工作,以此来进行目标的搜索;另一种模式是系统锁定目标后,系统会进入自动跟踪的状态,此时,系统只接收与被跟踪目标位置的误差信号并进行不断修正该误差,使视轴能够始终跟踪目标。
本文的基于陀螺稳定平台的吊舱控制系统主要是由三个部分组成,它们分别是:本体模块、电气控制器以及人机交互模块,整个系统总体结构框图见下图1.本体模块采用两轴四框架的机械结构,整个体系从外到内可分为基座、外方位框架、外俯仰框架、内方位框架、内俯仰框架以及负载等几个部分。
遗传算法在飞行器智能控制中的实际应用在现代科技的快速发展下,飞行器智能控制成为了航空领域的一个重要研究方向。
而在飞行器智能控制中,遗传算法被广泛应用于优化问题的求解。
遗传算法是一种模拟自然进化过程的优化算法,通过模拟遗传、变异和选择等过程,寻找问题的最优解。
下面我们将探讨遗传算法在飞行器智能控制中的实际应用。
首先,遗传算法在飞行器路径规划中的应用非常广泛。
在飞行器的任务中,路径规划是一个关键问题,它决定了飞行器的飞行轨迹和避障策略。
而遗传算法通过优化路径规划问题,可以得到最优的飞行路径。
例如,当飞行器需要在复杂的环境中进行飞行时,遗传算法可以通过不断迭代和优化,找到最佳的路径,避开障碍物,保证飞行器的安全和高效。
其次,遗传算法在飞行器自主导航中也发挥着重要作用。
在无人机等飞行器的自主导航中,遗传算法可以通过优化导航参数,实现飞行器的自主定位和导航。
例如,当飞行器需要根据目标位置和环境条件进行导航时,遗传算法可以通过优化导航参数,使飞行器能够准确地到达目标位置,并根据环境条件做出相应的调整,实现自主导航。
此外,遗传算法还可以应用于飞行器的姿态控制。
在飞行器的姿态控制中,遗传算法可以通过优化控制参数,实现飞行器的稳定和精确控制。
例如,当飞行器需要进行复杂的姿态调整时,遗传算法可以通过不断迭代和优化,找到最佳的控制参数,使飞行器能够稳定地保持所需的姿态。
此外,遗传算法还可以应用于飞行器的能量优化。
在飞行器的能量优化中,遗传算法可以通过优化能量分配策略,实现飞行器的能量高效利用。
例如,当飞行器需要在有限的能量资源下完成任务时,遗传算法可以通过优化能量分配策略,使飞行器在保证任务完成的前提下,尽可能地减少能量消耗,延长飞行器的续航时间。
综上所述,遗传算法在飞行器智能控制中的实际应用非常广泛。
无论是在路径规划、自主导航、姿态控制还是能量优化等方面,遗传算法都可以通过优化问题的求解,实现飞行器的智能控制。
随着科技的不断发展,相信遗传算法在飞行器智能控制中的应用将会越来越广泛,为航空领域的发展带来更多的创新和突破。

光电吊舱稳定控制方法研究发布时间:2023-02-28T09:05:38.840Z 来源:《科技新时代》2022年第19期作者:张明、冉承平[导读] 吊舱涉及精密机械、光学设计、传感器技术、信号处理、图像处理、自动控制等多个专业领域工作。
坦克胶张明、冉承平中国航空工业集团公司洛阳电光设备研究所河南洛阳 471000摘要:吊舱涉及精密机械、光学设计、传感器技术、信号处理、图像处理、自动控制等多个专业领域工作。
坦克胶囊在军事领域发挥着重要作用,在民用领域也有相当大的发展,能够在许多应用领域迅速有效地应对突发情况,执行侦察、搜索等任务对研究至关重要。
关键词:光电吊舱;稳定控制;方法研究引言光电吊舱一般安装陀螺仪,该算法允许惯性空间通过伺服驱动算法进行角度偏移。
当梁的角度偏移时,可通过伺服驱动算法控制光通量的分量,以确保惯性空间的稳定性,并实时将光体的光波对准目标。
但是当承运人在空中进行直线高速运动时,光电阴极视线无法补偿由载波线性运动引起的视线偏移,光电阴极的光轴方向和成像视场可能随着线性运动而迅速变化这对目标图像识别、目标跟踪、目标激光照射制导等功能的实现有不好的影响。
一、光电吊舱简介光电吊舱是一种机载光电探测系统,集成了可见光、红外、激光等多传感器,可以在白天和晚上对目标进行遥感成像、跟踪、激光照射、损伤效果评估等,是战斗机定位、监控、识别等重要设备总体而言,光电舱是模块化设计的,分为头部、线圈段、环形段和电子摄像机4的大部分,这样可以通过飞机和MIL-STD-1553B数据总线传输数字信息,如图1所示。
视景、红外视频图像通过复合视频传输到驾驶舱中的显示器,用于驾驶员夜间和恶劣天气条件下的飞行和攻击。
二、研究背景及意义光电吊舱用作通常安装在飞机外部(即机身下方)的光路的底盘。
为了减少吊舱在航空母舰上暴露在空气中的阻力,外壳通常采用流线型结构。
衰减使用户可以根据灯光照明设备中包含的灯光照明设备对目标进行检测、定位、跟踪和动态监视。
光电吊舱陀螺稳定系统遗传算法控制
航空光电吊舱陀螺稳定系统,即吊舱结构形式的机载光电跟踪系统。
它将光电载荷安装在稳定平台上,借助陀螺稳定平台隔离载机的振动,进而获得平台空间,通过控制指令的驱动,完成光电载荷对目标的搜索、捕获、跟踪、定位等一系列的任务。
针对机载光电测量仪器放的稳定性,我们设计了一个两维的支撑平台稳像系统,借助该系统吊舱可以完成搜索与跟踪两项基本任务[1]。
1 系统的组成
稳像系统由主体仪器、控制放大器和脱靶量计算单元三大部分组成,如图1所示[2]:
主体仪器:对于稳像系统而言,两轴支撑的常平架结构构成主体仪器。
外环(方位环)垂直装设于基座上,光电测量仪则装设在内环(水平环)上。
正交处理内、外环的转动轴,外环呈360°全周转动。
将二自由度挠性陀螺仪分别装设在内、外环上,借助锁定回路形成速率陀螺,用以量测两轴转动的角速度。
控制放大器:控制放大器对两环上驱动电机转动的控制是根据操作指令和跟踪目标的脱靶量实现的,确保隔离基座摇摆或测量仪的光轴始终锁定施测目标。
脱靶量计算单元:参照由光电跟踪仪测得的图像信息,脱靶量计算单元用以计算目标的脱靶量,处理结果输入控制器作为系
统位置环的输入量。
2 系统的技术指标
3 建立系统控制模型
5 结论
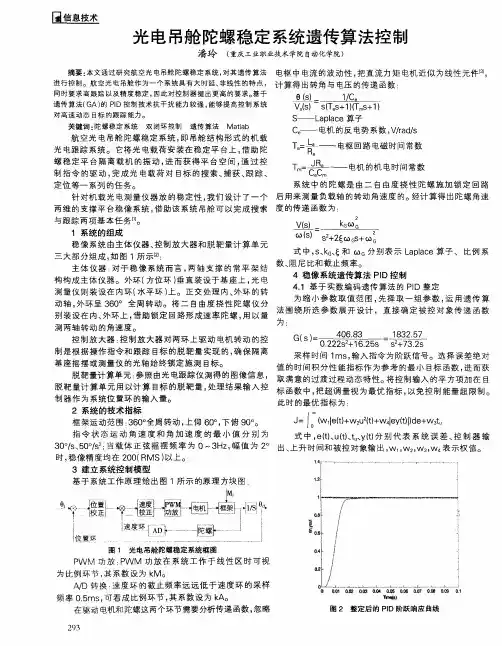
本文对光电吊舱稳像系统进行了遗传算法PID研究,通过仿真实验对优化后的控制器进行检验,其阶跃响应曲线平稳,无超调量,对系统的负载扰动具有良好的适应能力。
机载光电吊舱陀螺稳定系统智能控制研究的开题报告一、研究背景机载光电吊舱陀螺稳定系统是现代军事航空光电侦察、火控等领域中不可或缺的重要设备。
其具备较高的稳定性、精确性、灵敏性等特点,能够实现夜视、远距离目视、高精度打击等多种功能,可以满足军事任务的需要。
目前,光电吊舱陀螺稳定系统在机载光电设备中占据着重要地位,其控制系统的性能对于该设备的作用、输出精度和稳定性均有直接影响。
随着科技的不断进步和国家对于军事技术的追求和强化,陀螺稳定系统智能控制技术的研究变得更加重要和必要。
智能控制技术可以使光电吊舱具备更快、更准、更稳定的输出响应能力,并且可以实现自主运转,更好地适应复杂的环境和任务需求。
二、研究内容和目的本课题的研究内容是机载光电吊舱陀螺稳定系统智能控制技术。
主要研究内容包括:1. 光电吊舱陀螺稳定系统的控制原理和运作方式的分析研究,掌握光电吊舱的控制方式和逻辑。
2. 研究光电吊舱控制的电气、电子和信息处理技术的有关要素,包括控制算法、通信协议、传感器选择、控制器类型、执行器设计等。
3. 设计基于陀螺测量数据的智能控制算法,实现对光电吊舱的在线控制和优化,提高控制精度和系统的稳定性。
4. 建立机载光电吊舱智能控制系统的仿真模型,并进行仿真实验验证其控制效果和性能。
本课题的研究目的是:通过研究和分析机载光电吊舱陀螺稳定系统控制技术,研发出更加先进、精确、稳定的智能控制系统,为提高光电吊舱的性能、精度和工作效率提供支持和保障。
三、研究方法和技术路线本课题的研究方法和技术路线如下:1. 研究光电吊舱陀螺稳定系统的控制原理和运作方式,掌握其基本的控制模型和特点。
2. 分析控制要素,确定系统的核心控制算法和具体实现方案,选取合适的控制器、传感器等硬件设备。
3. 建立基于陀螺测量数据的控制算法,深入研究其数学原理和计算逻辑,实现智能控制功能。
4. 设计并实现光电吊舱智能控制系统的仿真模型,进行仿真验证和性能测试研究。
陀螺稳定光电吊舱的技术现状陀螺稳定光电吊舱是一种集成了光电探测与成像、惯性导航与稳定控制等技术的先进设备。
其主要特点是利用高精度陀螺仪等传感器,通过实时测量飞行器的姿态和运动状态,使光电系统保持相对稳定的方向,从而实现精准的成像和监视任务。
在技术层面,陀螺稳定光电吊舱的主要组成部分包括:1. **光电探测与成像系统:** 集成了高分辨率的光电传感器、红外热像仪、激光测距仪等,用于实现各种环境下的目标探测、识别和跟踪。
2. **惯性导航系统:** 高精度陀螺仪、加速度计等传感器,用于实时测量飞行器的姿态、角速度和线加速度,提供准确的导航信息。
3. **稳定控制系统:** 通过精密的控制算法,基于传感器提供的数据对光电吊舱进行实时的姿态调整,使其保持相对稳定的状态。
4. **通信与数据链路:** 与飞行器或地面控制站建立可靠的通信链路,传输图像数据和导航信息,实现实时监视和指挥。
技术上的不断创新和发展,使得陀螺稳定光电吊舱在以下几个方面取得了显著进展:- **高分辨率成像技术:** 利用先进的光电传感器和图像处理技术,实现对目标的高分辨率成像,提高监视、侦查和情报收集的能力。
- **多波段感知技术:** 具备红外、可见光、激光等多种波段的感知能力,适应不同环境下的任务需求,提高适应性和灵活性。
- **自动目标跟踪技术:** 引入机器学习和人工智能算法,实现对目标的自动识别和跟踪,减轻操作员的负担,提高任务执行效率。
- **抗干扰性能:** 针对电磁干扰、强光闪烁等复杂环境,加强吊舱系统的抗干扰性能,确保在恶劣条件下仍能有效执行任务。
**陀螺稳定光电吊舱在军民融合战略下的应用与发展**在军民融合战略下,陀螺稳定光电吊舱的应用得到了广泛推广,并在军事、民用领域取得了显著成果。
1. **军事应用:**- **侦察监视任务:** 陀螺稳定光电吊舱可搭载于军用飞机、直升机、侦察无人机等平台,用于执行侦察、监视和目标跟踪任务。
两轴光电平台陀螺配置及控制系统设计研究【摘要】两轴陀螺稳定是动载体作战平台保持瞄准线稳定常采用的一种方式。
陀螺安装的方式不同,则载体姿态的角速度补偿量表达式和伺服控制系统的构建也不同。
从稳定和测姿原理上建立了系统的数学模型,归纳出陀螺安装三种不同方法及其相应的控制系统设计。
通过比较得出动载体两轴光电平台陀螺最佳配置方案。
【关键词】光电侦察;两轴系统;瞄准线稳定;陀螺稳定;陀螺安装;速度耦合引言以电视、红外和激光等为代表的光电技术是现代军事装备技术变革的方向之一,各类探测器广泛应用于飞机、舰船和车辆等载体上,完成战场侦察和目标跟踪等任务。
在探测器成像周期内的载体振动和机动等将使图像产生抖动,严重影响图像清晰度和分辨率等性能,因此人们引入了惯性稳定技术,用以隔离载体扰动,使得图像或光轴在惯性空间保持稳定。
目前,在舰载、车载和机载光电跟瞄系统中,普遍采用了两轴制陀螺稳定方式,即采用速率陀螺测量载体姿态,将测量信息通过一定的计算再引入到伺服回路作为扰动补偿量进行控制,用以消除载体运动对瞄准线的扰动。
本文就速率陀螺安装与补偿量之间关系进行分析和探讨。
一、几个坐标系的规定在进行推导前,必须首先规定各个坐标系和船摇姿态角的符号及正方向。
为了推导公式方便,我们假定,除特别指明的以外,所有坐标系的原点都是重合的,均在各自的转轴处。
下面是几个常用坐标系。
1.载体直角坐标系:又称动坐标系,如图1所示。
轴与载体前进方向垂直,并与其在同一平面上,载体前进方向右侧为正;轴载体纵轴重合,载体前进方向为正:轴与载体平面垂直,向上为正。
坐标系符合右手定则。
图1 载体直角坐标系示意图2.方位直角坐标系:初始位置与载体直角坐标系重合,未摇摆时光电平台传感器瞄准线对准载体前进方向水平物体。
如果载体有摇摆时,为实现瞄准线稳定,在载体直角坐标系内绕-轴传感器旋转角,得方位直角坐标系,再在方位直角坐标系内绕轴传感器旋转角,得俯仰直角坐标系。
载光电跟踪系统基于遗传算法的模糊控制器优化设计研究载光电跟踪系统是一种基于光学原理的自动跟踪系统,其主要应用于太阳能电池板、卫星通信、天文观测等领域。
然而,由于环境因素的干扰和系统本身的复杂性,该系统的跟踪精度和稳定性往往受到限制。
因此,优化设计载光电跟踪系统的控制器是非常必要的。
本文提出了一种基于遗传算法的模糊控制器优化设计方法,以提高载光电跟踪系统的性能。
该方法首先采用模糊控制器进行系统控制,然后使用遗传算法对模糊控制器进行优化,以获得最优的控制参数。
具体来说,该方法的步骤如下:第一步,设计模糊控制器。
模糊控制器是一种基于模糊逻辑的控制器,其输入和输出都是模糊集合。
本文采用三角隶属函数对输入和输出进行模糊化处理,以获得更精确的控制效果。
第二步,构建适应度函数。
适应度函数用于评估控制器的性能,本文采用系统误差和控制器响应时间作为适应度函数的评价指标。
系统误差是指系统输出与参考信号之间的差异,控制器响应时间是指控制器从输入信号到输出信号的时间间隔。
第三步,使用遗传算法进行优化。
遗传算法是一种模拟自然选择和遗传机制的优化算法,其基本思想是通过不断迭代,从种群中选取适应度较高的个体,并进行交叉和变异操作,以产生新的个体。
本文采用遗传算法对模糊控制器的参数进行优化,以获得最优的控制效果。
第四步,仿真验证。
本文采用Matlab软件对优化后的控制器进行仿真验证,以评估其性能。
仿真结果表明,优化后的控制器能够显著提高载光电跟踪系统的跟踪精度和稳定性。
综上所述,本文提出了一种基于遗传算法的模糊控制器优化设计方法,以提高载光电跟踪系统的性能。
该方法具有简单、高效、精确的特点,能够为载光电跟踪系统的优化设计提供参考。
专利名称:一种用于微小型光电吊舱的陀螺漂移自动补偿方法专利类型:发明专利
发明人:王亮,高业灿,赵胜斌,王嘉仪
申请号:CN201911363578.2
申请日:20191226
公开号:CN110954139A
公开日:
20200403
专利内容由知识产权出版社提供
摘要:本发明涉及一种用于微小型光电吊舱的陀螺漂移自动补偿方法,包括失能吊舱方位、俯仰电机,使吊舱静止;采集N组方位陀螺角速度Y、Y…..Y、俯仰陀螺角速度P、P…..P;输入到卡尔曼滤波器中得数据后平均;将均值负数值输入吊舱控制系统的速度控制器中,计算出方位、俯仰两个轴系的漂移补偿参数ω和ω;(5)、将方位、俯仰陀螺漂移补偿参数ω和ω输入到稳定控制系统,抵消温度带给陀螺的漂移,存储补偿参数,改变控制系统进动值,使吊舱进入正常工作状态。
本发明解决了陀螺数据因温度变化产生的图像漂移,使吊舱光轴在惯性空间稳定;补偿精度高,小视场下图像稳定性好;实用性强,可靠性好。
申请人:洛阳伟信电子科技有限公司
地址:471009 河南省洛阳市中国(河南)自由贸易试验区洛阳片区高新技术开发区凌波路2号国籍:CN
代理机构:河南广文律师事务所
代理人:王自刚
更多信息请下载全文后查看。
光电吊舱陀螺稳定系统遗传算法控制
本文通过研究航空光电吊舱陀螺稳定系统,对其遗传算法进行控制。
航空光电吊舱作为一个系统具有大时延、非线性的特点,同时要求高跟踪以及精度稳定,因此对控制器提出更高的要求。
基于遗传算法(GA)的PID控制技术抗干扰能力较强,能够提高控制系统对高速动态目标的跟踪能力。
标签:陀螺稳定系统双闭环控制遗传算法Matlab
航空光电吊舱陀螺稳定系统,即吊舱结构形式的机载光电跟踪系统。
它将光电载荷安装在稳定平台上,借助陀螺稳定平台隔离载机的振动,进而获得平台空间,通过控制指令的驱动,完成光电载荷对目标的搜索、捕获、跟踪、定位等一系列的任务。
针对机载光电测量仪器放的稳定性,我们设计了一个两维的支撑平台稳像系统,借助该系统吊舱可以完成搜索与跟踪两项基本任务[1]。
1 系统的组成
稳像系统由主体仪器、控制放大器和脱靶量计算单元三大部分组成,如图1所示[2]:
主体仪器:对于稳像系统而言,两轴支撑的常平架结构构成主体仪器。
外环(方位环)垂直装设于基座上,光电测量仪则装设在内环(水平环)上。
正交处理内、外环的转动轴,外环呈360°全周转动。
将二自由度挠性陀螺仪分别装设在内、外环上,借助锁定回路形成速率陀螺,用以量测两轴转动的角速度。
控制放大器:控制放大器对两环上驱动电机转动的控制是根据操作指令和跟踪目标的脱靶量实现的,确保隔离基座摇摆或测量仪的光轴始终锁定施测目标。
脱靶量计算单元:参照由光电跟踪仪测得的图像信息,脱靶量计算单元用以计算目标的脱靶量,处理结果输入控制器作为系统位置环的输入量。
2 系统的技术指标
3 建立系统控制模型
5 结论
本文对光电吊舱稳像系统进行了遗传算法PID研究,通过仿真实验对优化后的控制器进行检验,其阶跃响应曲线平稳,无超调量,对系统的负载扰动具有良好的适应能力。
参考文献:
[1]李文魁,王俊璞,金志华,田蔚风.直升机机载光电吊舱的发展现状及对策[J].中国惯性技术学报,2004,12(5):75-80.
[2]谈振藩,李庆.航空光电吊舱陀螺稳定系统研究[D].哈尔滨:哈尔滨工程大学,2007.
[3]胡寿松.自动控制原理[M].第四版.北京:科学出版社,2000.
[4]施阳.MATLAB语言精要及动态仿真工具SIMULINK[M].西安:西北工業大学出版社,1999.。