多旋翼无人机系统组成3
- 格式:doc
- 大小:80.50 KB
- 文档页数:1
多旋翼无人机的组成
多旋翼无人机是一种通过多个旋翼提供升力和稳定性的飞行器。
它由多个旋翼、机身、电池、控制器和传感器等部件组成。
下面将介绍多旋翼无人机的组成结构及各部件的功能。
1. 旋翼:多旋翼无人机通常由四个以上的旋翼组成,常见的有四旋翼、六旋翼、八旋翼等。
旋翼通过快速旋转产生升力,控制旋翼的转速可以实现飞行高度和方向的调节。
2. 机身:机身是连接各个部件的主体,通常由轻质材料如碳纤维或铝合金制成,具有足够的强度和稳定性以支撑整个无人机的飞行。
3. 电池:电池是提供动力的重要部件,多旋翼无人机通常使用锂电池作为能源,电池的容量和电压会直接影响无人机的续航时间和飞行性能。
4. 控制器:控制器是多旋翼无人机的大脑,负责接收和处理传感器反馈的数据,控制旋翼的转速和姿态,以确保无人机的稳定飞行和精准操控。
5. 传感器:传感器包括陀螺仪、加速度计、罗盘等,通过感知飞行器的姿态、速度和方向等信息,传输给控制器进行实时调节,以保持飞行器的平衡和稳定。
6. 遥控器:遥控器是操作无人机的设备,通过遥控器上的摇杆、按
钮等控制无人机的起飞、降落、飞行方向和高度等动作。
多旋翼无人机的组成包括旋翼、机身、电池、控制器、传感器和遥控器等部件,每个部件都发挥着重要的作用,协同工作才能实现无人机的稳定飞行和精准操控。
随着技术的不断发展,多旋翼无人机在农业、航拍、物流等领域有着广泛的应用前景,相信未来会有更多创新的无人机设计和应用出现。
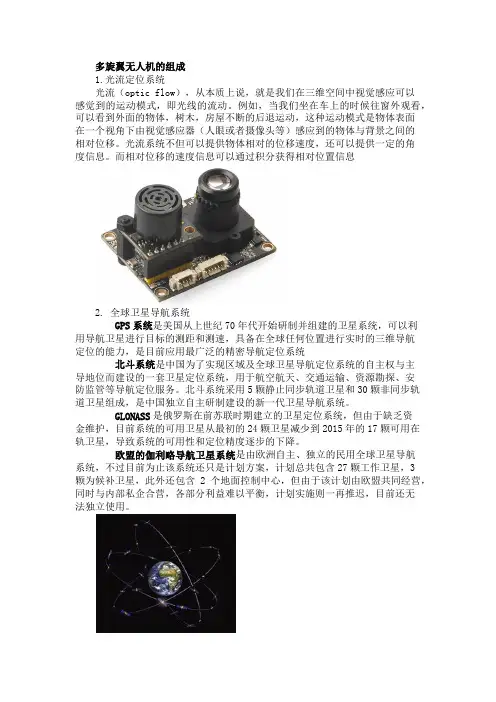
多旋翼无人机的组成1.光流定位系统光流(optic flow),从本质上说,就是我们在三维空间中视觉感应可以感觉到的运动模式,即光线的流动。
例如,当我们坐在车上的时候往窗外观看,可以看到外面的物体,树木,房屋不断的后退运动,这种运动模式是物体表面在一个视角下由视觉感应器(人眼或者摄像头等)感应到的物体与背景之间的相对位移。
光流系统不但可以提供物体相对的位移速度,还可以提供一定的角度信息。
而相对位移的速度信息可以通过积分获得相对位置信息2. 全球卫星导航系统GPS系统是美国从上世纪70年代开始研制并组建的卫星系统,可以利用导航卫星进行目标的测距和测速,具备在全球任何位置进行实时的三维导航定位的能力,是目前应用最广泛的精密导航定位系统北斗系统是中国为了实现区域及全球卫星导航定位系统的自主权与主导地位而建设的一套卫星定位系统,用于航空航天、交通运输、资源勘探、安防监管等导航定位服务。
北斗系统采用5颗静止同步轨道卫星和30颗非同步轨道卫星组成,是中国独立自主研制建设的新一代卫星导航系统。
GLONASS是俄罗斯在前苏联时期建立的卫星定位系统,但由于缺乏资金维护,目前系统的可用卫星从最初的24颗卫星减少到2015年的17颗可用在轨卫星,导致系统的可用性和定位精度逐步的下降。
欧盟的伽利略导航卫星系统是由欧洲自主、独立的民用全球卫星导航系统,不过目前为止该系统还只是计划方案,计划总共包含27颗工作卫星,3颗为候补卫星,此外还包含2个地面控制中心,但由于该计划由欧盟共同经营,同时与内部私企合营,各部分利益难以平衡,计划实施则一再推迟,目前还无法独立使用。
3.高度计由于全球定位系统GNSS的缺陷,它的高度信息极为不准确,通常偏差达几十米甚至更大,无人机系统的高度测量需要额外的设备来辅助测量。
常用的高度传感器主要包含超声波传感器和气压高度传感器,此外还有激光高度计和微波雷达高度计等。
气压高度计的原理是地球上测量的大气压力在一定方位内是与相对海拔高度呈现对应关系的。
多旋翼无人机的结构组成多旋翼无人机的结构组成多旋翼无人机是一种新型的无人机设备,由于其灵活多变的飞行方式,已经在军事、民用、科研等领域得到广泛的应用。
在这里,我们将从多旋翼无人机的结构组成方面进行介绍,以帮助大家更加了解这一设备。
一、框架结构框架结构是多旋翼无人机的骨架,其主要组成部分是底盘、支腿和中央马达支架等。
底盘是用于支撑无人机航空设备的主体部分,是多旋翼无人机的重要组成部分。
支腿主要用于支撑无人机的重量,使无人机能够稳定地静止在空中。
中央马达支架是用来安装电机的部件,电机负责驱动桨叶运转。
二、无人机外壳无人机外壳是多旋翼无人机的保护罩,其主要功能是保护无人机的内部部件,同时减少无人机在飞行过程中的阻力,提高空气动力学性能。
外壳的选材和加工工艺对多旋翼无人机的精度和稳定性有很大的影响。
目前,一般采用碳纤维、玻璃钢等材料来制造外壳。
三、主控制板主控制板是多旋翼无人机电路的核心,承载着多旋翼无人机的系统稳定性和性能。
它能够控制飞行器在空中的姿态、高度、飞行方向等。
通过与调速器、电机和遥控器等设备的配合工作,可以实现多旋翼无人机的安全起飞、飞行、降落等功能。
四、电机与电调电机与电调是多旋翼无人机的动力设备,负责产生推力、驱使桨叶旋转,从而实现多旋翼无人机在空中飞行的目的。
电调根据遥控器的指令调整电机的速度,以控制多旋翼无人机的飞行高度和方向。
不同类型的无人机需要不同数量和规格的电机和电调来完成权衡稳定性和飞行性能的设计。
五、传感器和控制器传感器和控制器是多旋翼无人机的智能设备。
传感器负责收集无人机周围的地面、空气、气压等信息,并将这些信息发送到控制器进行处理。
控制器根据这些信息来计算控制多旋翼无人机的姿态、高度、速度等参数,然后通过电机和电调来控制飞行器的方向和速度。
六、摄像头和图传设备摄像头和图传设备是多旋翼无人机的智能设备,可以对周围环境进行拍摄和图像传输。
典型的用途包括空中摄像和实时监控等。

[键入文字]V1.1版翎航智能科技工作室培训教材 多旋翼无人机知识手册前言随着多旋翼无人机的应用日趋广泛,多旋翼无人机的入门门槛越来越低,“到手飞”、个人航拍机等对操作人员的要求几乎是零,对毫无基本常识和经验的人来说也可以操作。
但这些都为人身和财产安全埋下了巨大的隐患,出于以上考虑,本教材阐述了多旋翼无人机的基本原理、总结了飞行过程中的注意事项、操作方法、以及如何规避风险。
这是一本适合飞行初学者的教材,旨在普及航空知识、和飞行常识等基本理论,根据经验提出在飞行中应该注意的问题和如何规避风险、应急处置等。
本教材的材料有些基于无人机方面的书籍,有些则基于航模飞行的经验,很多都是十分难得的第一手资料,因此可以作为飞行初学者的基础教程,也可以作为以拓宽知识面、开拓思路为主要目的的广大无人机爱好者的学习资料。
由于水平有限,时间仓促,书中疏漏之处在所难免,敬请读者朋友批评指正,以使我们在再版时修订。
作者目录前言................................................................................................... - 2 - 目录................................................................................................... - 3 - 第一章绪论 ....................................................................................... - 4 - 第二章系统组成及原理.................................................................... - 7 - 第三章飞行器 ................................................................................. - 18 - 第四章操作方法实例...................................................................... - 26 - 第五章其他细节 ............................................................................. - 45 - 第六章多旋翼无人机的作用与意义 .............................................. - 53 - 第七章与多旋翼无人机有关的航空法规及航空气象 ................... - 54 - 总结................................................................................................... - 66 - 参考文献 ........................................................................................... - 66 -第一章绪论关于无人机系统的发展历史在任何一本讲无人机的书里都有介绍,在这里不再重复。
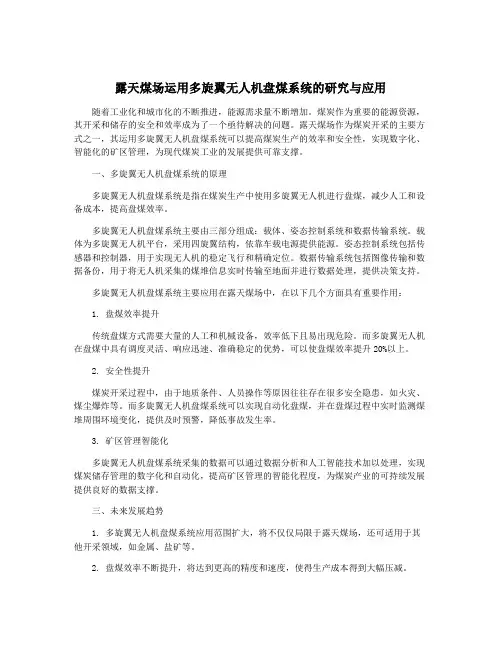
露天煤场运用多旋翼无人机盘煤系统的研究与应用随着工业化和城市化的不断推进,能源需求量不断增加。
煤炭作为重要的能源资源,其开采和储存的安全和效率成为了一个亟待解决的问题。
露天煤场作为煤炭开采的主要方式之一,其运用多旋翼无人机盘煤系统可以提高煤炭生产的效率和安全性,实现数字化、智能化的矿区管理,为现代煤炭工业的发展提供可靠支撑。
一、多旋翼无人机盘煤系统的原理多旋翼无人机盘煤系统是指在煤炭生产中使用多旋翼无人机进行盘煤,减少人工和设备成本,提高盘煤效率。
多旋翼无人机盘煤系统主要由三部分组成:载体、姿态控制系统和数据传输系统。
载体为多旋翼无人机平台,采用四旋翼结构,依靠车载电源提供能源。
姿态控制系统包括传感器和控制器,用于实现无人机的稳定飞行和精确定位。
数据传输系统包括图像传输和数据备份,用于将无人机采集的煤堆信息实时传输至地面并进行数据处理,提供决策支持。
多旋翼无人机盘煤系统主要应用在露天煤场中,在以下几个方面具有重要作用:1. 盘煤效率提升传统盘煤方式需要大量的人工和机械设备,效率低下且易出现危险。
而多旋翼无人机在盘煤中具有调度灵活、响应迅速、准确稳定的优势,可以使盘煤效率提升20%以上。
2. 安全性提升煤炭开采过程中,由于地质条件、人员操作等原因往往存在很多安全隐患,如火灾、煤尘爆炸等。
而多旋翼无人机盘煤系统可以实现自动化盘煤,并在盘煤过程中实时监测煤堆周围环境变化,提供及时预警,降低事故发生率。
3. 矿区管理智能化多旋翼无人机盘煤系统采集的数据可以通过数据分析和人工智能技术加以处理,实现煤炭储存管理的数字化和自动化,提高矿区管理的智能化程度,为煤炭产业的可持续发展提供良好的数据支撑。
三、未来发展趋势1. 多旋翼无人机盘煤系统应用范围扩大,将不仅仅局限于露天煤场,还可适用于其他开采领域,如金属、盐矿等。
2. 盘煤效率不断提升,将达到更高的精度和速度,使得生产成本得到大幅压减。
3. 多旋翼无人机的应用将向智能化和自主化方向发展,例如结合机器视觉和神经网络技术,实现无人机的自主盘煤等。
《项目2 多旋翼无人机系统组成》练习题多轴飞行器动力系统主要使用A.无刷电机B.有刷电机C.四冲程发动机答案:A.多轴飞行器动力系统主要使用A.步进电机B.内转子电机C.外转子电机答案:C.多轴飞行器使用的电调一般为A.双向电调B.有刷电调C.无刷电调答案:C.多轴飞行器使用的动力电池一般为A.聚合物锂电池B.铅酸电池C.银锌电池答案:A.部分多轴飞行器螺旋桨根部标有“CCW”字样,其意义为A.此螺旋桨由CCW公司生产B.此螺旋桨为顶视顺时针旋转C.此螺旋桨为顶视逆时针旋转答案:C.多轴飞行器的飞控指的是A.机载导航飞控系统B.机载遥控接收机C.机载任务系统答案:A.多轴飞行时地面人员手里拿的“控”指的是A.地面遥控发射机B.导航飞控系统C.链路系统答案:A.某多轴飞行器动力电池标有11.1V,它是A.6S锂电池B.11.1S锂电池C.3S锂电池答案:C.多轴飞行器的遥控器一般有A.2个通道B.3个通道C.4个及以上通道答案:C.多轴的“轴”指A.舵机轴B.飞行器运动坐标轴C.动力输出轴答案:C.多轴飞行器起降时接触地面的是A.机架B.云台架C.脚架答案:C.多轴飞行器动力电池充电尽量选用A.便携充电器B.快速充电器C.平衡充电器答案:C.多轴飞行器每个“轴”上,一般连接A.1个电调,1个电机B.2个电调,1个电机C.1个电调,2个电机答案:A.多轴飞行器上的电信号传播顺序一般为A.飞控——机载遥控接收机——电机——电调B.机载遥控接收机——飞控——电调——电机C.飞控——电调——机载遥控接收机——电机答案:B.电调上最粗的红线和黑线用来连接A.动力电池B.电动机C.机载遥控接收机答案:A.多轴无人机,电调上较细的白红黑3色排线,也叫杜邦线,用来连接A.电机B.机载遥控接收机C.飞控答案:C.多轴飞行器,电调和电机一般通过3根单色线连接,如任意调换其中2根与电机的连接顺序,会出现A.该电机停转B.该电机出现过热并烧毁C.该电机反向运转答案:C.4轴飞行器飞行运动中有A.6个自由度,3个运动轴B.4个自由度,4个运动轴C.4个自由度,3个运动轴答案:A.描述一个多轴无人机地面遥控发射机是“日本手”,是指A.右手上下动作控制油门或高度B.左手上下动作控制油门或高度C.左手左右动作控制油门或高度答案:A.4轴飞行器有“X”模式和“+”模式两大类,其中A.“+”模式操纵性好B.“X”模式操纵性好C.两种模式操纵性没有区别答案:B.多轴飞行器飞控板上一般会安装A.1个角速率陀螺B.3个角速率陀螺C.6个角速率陀螺答案:C..多轴飞行器飞控计算机的功能不包括A.稳定飞行器姿态B.接收地面控制信号C.导航答案:B.某多轴电调上标有“30A”字样,意思是指A.电调所能承受的最大瞬间电流是30安培B.电调所能承受的稳定工作电流是30安培C.电调所能承受的最小工作电流是30安培答案:A.某多轴电调上有BEC 5V字样,意思是指A.电调需要从较粗的红线与黑线输入5V的电压B.电调能从较粗的红线与黑线向外输出5V的电压C.电调能从较细的红线与黑线向外输出5V的电压答案:C.电子调速器英文缩写是A.B ECB.E SCC.M CS答案:B.经测试,某多轴飞行器稳定飞行时,动力电池的持续输出电流为5安培,该多轴可以选用A.5A的电调B.10A的电调C.30A的电调答案:C.用遥控器设置电调,需要A.断开电机B.接上电机C.断开动力电源答案:B.无刷电机与有刷电机的区别有A.无刷电机效率较高B.有刷电机效率较高C.两类电机效率差不多答案:A.关于多轴使用的无刷电机与有刷电机,说法正确的是A.有刷电机驱动交流电机B.无刷电机驱动交流电机C.无刷电机驱动直流电机答案:B.某多轴电机标有2208字样,意思是指A.该电机最大承受22V电压,最小承受8V电压B.该电机转子高度为22毫米C.该电机转子直径为22毫米答案:C.有2个输出功率相同的电机,前者型号3508,后者型号2820,以下表述正确的是A.3508适合带动更大的螺旋桨B.2820适用于更高的转速C.尺寸上,2820粗一些,3508高一些答案:C.某多轴电机标有1000KV字样,意义是指A.对应每V电压,电机提供1000000转转速B.对应每V电压,电机提供1000转转速C.电机最大耐压1000KV答案:B.某多轴电机转速为3000转,是指A.每分钟3000转B.每秒钟3000转C.每小时3000转答案:A.某多轴螺旋桨长254毫米,螺距114毫米,那么他的型号可表述为A.2511B.1045C.254114答案:B.某多轴螺旋桨长381毫米,螺距127毫米,那么他的型号可表述为A.3812B.15×5C.38×12答案:B.某螺旋桨是正桨,是指A.从多轴飞行器下方观察,该螺旋桨逆时针旋转B.从多轴飞行器上方观察,该螺旋桨顺时针旋转C.从多轴飞行器上方观察,该螺旋桨逆时针旋转答案:C.八轴飞行器安装有A.8个顺时针旋转螺旋桨B.2个顺时针旋转螺旋桨,6个逆时针旋转螺旋桨C.4个顺时针旋转螺旋桨,4个逆时针旋转螺旋桨答案:C.同样重量不同类型的动力电池,容量最大的的是A.聚合物锂电池B.镍镉电池C.镍氢电池答案:A.同样容量不同类型的电池,最轻的是A.铅酸蓄电池B.碱性电池C.聚合物锂电池答案:C.多轴飞行器使用的锂聚合物动力电池,其单体标称电压为A.1.2VB.11.1VC.3.7V答案:C.某多轴动力电池标有3S2P字样,代表A.电池由3S2P公司生产B.电池组先由2个单体串联,再将串联后的3组并联C.电池组先由3个单体串联,再将串联后的2组并联答案:C.某多轴动力电池容量为6000mAh,表示A.理论上,以6A电流放电,可放电1小时B.理论上,以60A电流放电,可放电1小时C.理论上,以6000A电流放电,可放电1小时答案:A..以下哪种动力电池在没有充分放电的前提下,不能够以大电流充电A.铅酸蓄电池B.镍镉电池C.锂聚合物电池答案:B.以下哪种动力电池放电电流最大A.2000mAh,30CB.20000mAh,5CC.8000mAh,20C答案:C.一般锂聚合物电池上都有2组线。
飞行器航空器
无人多
旋翼轻于
空气
气球
飞艇
重于
空气
旋翼
固定翼
共轴、纵列、
横列双旋翼
多旋翼
自转旋
翼机
直升机
航天器
卫星
火箭
有人多
旋翼
升力的标准公式Lift=1/2 CyρV²S
结构子系统
机载链
路子系统遥控接收机、机载数传模块及天线、机载图传模块和天线
典型多
旋翼无人机系统链路
分系
统
飞行
器平
台分
系统
飞控子
系统
动力子
系统
机架、脚架、云台
主板控、飞控软件、外接式IMU、
GPS、其他外接传感器
桨、电机、电调、电池、充电器
地面
站分
系统
地面链
路子系
统
遥控子
系统
(操纵)
遥测子
系统
(显示)
遥控发射机杆、开关、键盘、鼠
标等
遥控发射机、地面数传模块和天
线、地面图传模块及天线
飞控地面站界面、图传显示屏、
OSD
飞控内外回路(姿态、位置)均不参与控制飞控内回路稳定姿态,外回路稳定位置,人来影响修正位置飞控内回路稳定姿态,人来影响姿态以改变位置军用:舵面遥控民用:纯手动模式
军用:姿态遥控
民用:姿态或曾稳模式
军用:人工修正
民用:GPS 模式
飞控内回路稳定姿态,外回路根据航点设置控制位置
军用:自主
民用:航线飞行
注意线的顺序
thanks。
多旋翼无人机组成结构无人机技术是近年来发展最快的技术之一,其中多旋翼无人机是应用最广泛的一种。
多旋翼无人机的组成结构十分重要,它直接影响着无人机的性能和使用效果。
本文将详细介绍多旋翼无人机的组成结构,包括机身、电机、螺旋桨、控制系统等方面。
一、机身多旋翼无人机的机身是由框架、电池、电调、传感器等组成的。
机身的结构设计应该考虑到机身的重量、强度、稳定性和可靠性等因素。
机身的材料一般为碳纤维、玻璃钢、铝合金等轻质高强度材料。
机身的重量直接影响着无人机的飞行时间和稳定性,因此应该尽可能的轻量化,同时又要保证足够的强度和稳定性。
二、电机多旋翼无人机的电机是用来驱动螺旋桨旋转的,它的功率和质量决定了无人机的飞行性能。
电机的性能主要由转速、功率、效率和响应速度等指标来衡量。
一般来说,转速越高,功率越大,效率越高,响应速度越快的电机越适合用在多旋翼无人机上。
三、螺旋桨多旋翼无人机的螺旋桨是用来产生推力和提供稳定性的,它的选择应该考虑到螺旋桨的直径、旋翼数、材料和形状等因素。
螺旋桨的直径越大,推力越大,但是也会增加空气阻力和重量,影响无人机的飞行时间和稳定性。
旋翼数越多,无人机的稳定性越好,但是也会增加复杂性和重量。
螺旋桨的材料一般为碳纤维、玻璃钢等轻质高强度材料,形状则应该考虑到空气动力学的因素。
四、控制系统多旋翼无人机的控制系统是用来控制无人机运动的,它的设计应该考虑到控制精度、响应速度、稳定性和可靠性等因素。
控制系统一般由飞行控制器、遥控器、传感器等组成。
飞行控制器是无人机的大脑,它负责处理传感器数据、控制电机转速和角度等。
遥控器是用来控制无人机飞行的,它通过无线信号将指令传输给飞行控制器。
传感器是用来感知无人机周围环境的,包括陀螺仪、加速度计、罗盘和气压计等。
综上所述,多旋翼无人机的组成结构是十分复杂的,需要考虑到机身、电机、螺旋桨和控制系统等方面的因素。
只有在这些因素协调一致的情况下,才能保证无人机的飞行稳定性和使用效果。
多旋翼无人机飞控系统的组成多旋翼无人机的飞控系统,听起来是不是很高大上?别急,咱们慢慢来聊聊。
这种无人机就像一只小鸟,飞起来嗖嗖的,特别帅气。
飞控系统就是它的“大脑”,负责指挥它飞得高、飞得稳。
想象一下,有一个神秘的操控者在控制着这只小鸟,简直酷毙了!飞控系统里有几个重要的组成部分,就像一部电影里的主角和配角,缺一不可。
咱们得说说传感器。
这玩意儿就像无人机的“眼睛”,帮助它看清周围的环境。
有加速度计、陀螺仪、气压传感器等等。
加速度计就像小孩子蹦蹦跳跳,告诉无人机它的速度和方向。
陀螺仪呢?嘿,它就像一个很酷的DJ,控制无人机的旋转,让它不晕头转向。
气压传感器则是帮助无人机“测高”,知道自己离地面有多远。
看吧,这些小家伙的配合真是天衣无缝,让无人机在空中飞得稳如泰山!我们得聊聊飞控算法。
飞控算法就像一位高明的指挥家,调配着各个传感器的数据,给无人机下指令。
它得让无人机在风中翩翩起舞,避免跌落到地上,真是个高难度的活儿!这些算法常常用PID控制,听上去很复杂,其实就是通过计算误差来调整动作。
就像你在打游戏的时候,总是想着怎么能打得更准,飞控算法就是这么个原理。
哎呀,听起来是不是很有趣?再说说电机和桨叶。
电机就像无人机的“心脏”,给它提供动力。
桨叶呢?就像无人机的“翅膀”,帮助它飞起来。
二者的结合简直是天作之合,没电机,桨叶就像没水的鱼,没桨叶,电机也没法“展翅高飞”。
这时候你会发现,无人机的飞控系统就像一场完美的舞蹈,每个部件都在为表演而努力。
咱们还得提一提遥控器。
遥控器就像一个魔法棒,操控着无人机在空中自由飞翔。
飞行员只要轻轻一动,哗啦啦,无人机就能听话地飞到想去的地方。
现代的遥控器可不简单,有些还能显示无人机的实时数据,简直就像给飞行员装上了超级导航仪!想象一下,飞行员在空中像个指挥官,下面的无人机听他号令,真是让人心潮澎湃。
还有电源系统,别小看了这个家伙,它可是无穷无尽能量的来源。
电池就像无人机的“粮食”,没了电,它就得乖乖地降落。
3.电调
电调的全称是电子调速器,针对电机不同可分为有刷电子调速器和无刷电子调速器,它根据控制信号调节电动机的转速。
无刷电调输入是直流,可以接稳
压电源,
或者锂电池。
一般的供电都在2-6节锂电池左右。
输出是三相脉动直流,直接与电机的三相输入端相连。
如果上电后,电机反转,只需要把这三根线中间的任意两根对换位置即可。
无刷电调有一对信号线连出,用来与飞控系统连接,控制电机的运转。
多旋翼无人机需要使用专用电调,以适应多轴快速反应。
无刷电调的主要参数有输入电压范围、输出持续电流和最大允许瞬时电流、兼容信号频率等。
多旋翼航拍无人机通常为11.1V—22.2V(3-6节锂电池)直流电压,持续电流20A—40A,兼容信号频率30-450 Hz。
一些通用型电调还带有BEC(battey elimination circuit免电池电路)输出,例如5V/2A,可以为飞控和遥控接收器等设备供电。
但是如果这些设备需要的供电电流大于BEC所能提供的电流,就需要专门的供电设备来供电。
大疆的DJI S1000+使用的是4114专用电调,工作电流40A,工作电压6S LiPo(6节锂电池),兼容信号频率30Hz-450Hz。
图2.9 DJI 4114专用电调。